














 physics
physicsSimilar presentations:










Динамика твёрдого тела
1.
Динамика твёрдого тела2.
ВведениеДинамика твёрдых тел - это раздел механики, который изучает движение и взаимодействие твёрдых тел
под воздействием сил. Твёрдое тело определяется как физический объект, обладающий определенной
формой и размерами, который сохраняет свою форму и объем при воздействии внешних сил. В рамках
изучения динамики твёрдых тел рассматриваются такие физические величины, как ускорение, сила
трения, момент инерции и равнодействующая сила. Эти концепции позволяют описать и предсказать
поведение твёрдых тел при различных воздействиях и условиях. Изучение динамики твёрдых тел имеет
широкий спектр приложений, от разработки механизмов и машин до анализа движения небесных тел.
3.
Теорема ШтейнераТеорема Штейнера утверждает, что момент инерции твердого тела
относительно произвольной оси, параллельной данной оси и
проходящей через центр масс тела, равен сумме момента инерции
тела относительно оси, проходящей через центр масс и
перпендикулярной к данной оси, и произведения массы тела на
квадрат расстояния между осями.
4.
Момент инерции является мерой инертностиматериальной точки или твердого тела. Он определяется
как произведение массы тела на квадрат расстояния от оси
вращения до этой частицы.
Момент инерции системы твердых тел определяется как
сумма моментов инерции каждого тела в системе
относительно оси вращения.
В случае непрерывного распределения масс эта сумма
сводится к интегралу по объёму тела:
5.
Угловая скорость и угловое ускорениеУгловой скоростью называется векторная величина, равная первой производной угла поворота тела по
времени:
Вектор
направлен вдоль оси вращения по правилу правого винта, т.е. так же, как и вектор
(рис.7).
В векторном виде формулу для линейной скорости можно написать как векторное произведение:
Размерность угловой скорости dim =Т-1, а ее единица - радиан в секунду (рад/с). Линейная
.
скорость точки:
т.е. v= R.
Если =const, то вращение равномерное и его можно характеризовать периодом вращения Т – временем, за которое
точка совершает один полный оборот, т.е. поворачивается на угол 2 .Так как промежуток времени Δt=Т
соответствует
, то
, откуда
6.
Угловая скорость и угловое ускорениеЧисло полных оборотов, совершаемых телом при равномерном его движении по окружности в единицу времени,
называется частотой вращения
, откуда
Угловым ускорением называется векторная величина, равная первой производной угловой скорости по времени:
При вращении тела вокруг неподвижной оси вектор углового ускорения направлен вдоль оси вращения в сторону
вектора элементарного приращения угловой скорости. При ускоренном движении вектор
сонаправлен
вектору
(рис. 8), при замедленном - противонаправлен ему (рис.9).
Тангенциальная составляющая ускорения
и
.
Нормальная составляющая ускорения
Таким образом, связь между линейными (длина пути s, пройденного точкой по
дуге окружности радиуса R, линейная скорость
, тангенциальное ускорение
а, нормальное ускорение аn) и угловыми величинами (угол поворота , угловая
скорость , угловое ускорение ) выражается следующими формулами:
В случае равнопеременного движения точки по окружности ( =const):
- начальная угловая скорость.
7.
Момент инерции относительно оси вращенияВеличина угловой скорости
Изменение угловой скорости со временем определяется
вектором углового ускорения
При вращении по окружности момент импульса L относительно точки О: L = [r,mv] и
направления векторов L и ω не совпадают если точка О не в центре окружности. Если
движение идет по окружности и точка О’ в центре окружности то направления векторов
L’ и ω совпадают.
L’ = R*m*v*sin(90) = R*m*v = R*m*ω*R = m*R*R*ω = Iω
2
Скалярная I = mR величина называется моментом инерции
материальной точки относительно оси вращения.
8.
ТелоПоложение оси
вращения
Полый тонкостенный
цилиндр радиуса R
Ось симметрии
Сплошной цилиндр
или диск радиуса R
Ось симметрии
Стержень длиной l
Ось перпендикулярна
стержню и проходит
через его середину
Шар радиуса R
Ось проходит через
центр шара
Момент инерции
9.
Момент силы. Уравнение движения твердого тела, вращающегося вокругнеподвижной оси. Момент импульса.
Векторное произведение радиус-вектора (R), который проведен из точки О (рис.1) в точку к которой приложена
сила F на сам вектор F называют моментом силы (M) по отношению к точке O:F
На рисунке 1 точка О и вектор силы (F) и радиус-вектор r находятся в плоскости
рисунка. В таком случае вектор момента силы (M) перпендикулярен плоскости
рисунка и имеет направление от нас. Вектор момента силы является аксиальным.
Направление вектора момента силы выбирается таким образом, что вращение
вокруг точки О в направлении силы и вектор M создают правовинтовую систему.
Направление момента сил и углового ускорения совпадают.
Величина вектора M равна:
где alpha – угол между направлениями радиус-вектора
и вектора силы, l =r*sin(alpha) – плечо силы
относительно точки О.
10.
Момент силы. Уравнение движения твердого тела, вращающегося вокругнеподвижной оси. Момент импульса.
Пусть на твёрдое тело, имеющее неподвижную ось вращения z, действует система заданных
сил
Одновременно на тело действуют реакции подшипников и Чтобы
исключить из уравнения движения эти наперед неизвестные силы, воспользуемся теоремой
моментов относительно оси z. Так как моменты сил и
относительно оси z равны нулю,
то получим
Будем в дальнейшем величину
моментом.
называть вращающим
Подставляя в предыдущее равенство значение
, найдём
Это уравнения представляет собой дифференциальное уравнение вращательного движения твёрдого тела. Из него
следует, что произведение момента инерции тела относительно оси вращения на угловое ускорение равно
вращающемуся моменту:
Это равенство показывает, что при данном
ускорение.
чем больше момент инерции тела, тем меньше угловое
11.
Момент силы. Уравнение движения твердого тела, вращающегося вокругнеподвижной оси. Момент импульса.
Моментом импульса относительно оси
называется проекция вектора L на эту ось:
Моментом импульса относительно точки О называется вектор
L =[r K] = [r,mV]
LZ =[r K]Z
L системы материальных точек относительно какой-либо
точки (или оси) называется сумма моментов импульсов
относительно этой точки (или оси) всех материальных точек
системы:
L= ∑ L i
i
12.
Закон изменения и сохранения момента импульсаПроизводная по времени момента импульса системы (относительно какой-либо точки или оси) равна сумме моментов
(относительно той же точки или оси) всех внешних сил, действующих на точки системы.
-dL
---- = ∑ Nвнеш
dt i
Это и есть закон изменения момента импульса или уравнение моментов. В каждый Niвнеш входит произведение трех
величин ri , Fiвнеш и sin(alpha1). Если одна из них равна 0 то данный член вклада не дает. Один из возможных
вариантов, если все Fiвнеш = 0 т.е. система замкнута , то dL/dt = 0 и L = const
• Закон сохранения момента импульса: если сумма моментов внешних сил равна нулю, то момент импульса
системы не изменяется с течением времени (верно как относительно точки, так и оси).
Рис.1
Рис.2
Закон сохранения момента импульса может работать и для
незамкнутых систем в следующих случаях:
1. Если сумма моментов внешних сил равна нулю.
2. Если все внешние силы направлены вдоль одной оси, то их
моменты относительно любой оси, имеющей то же
направление, равны нулю. Поэтому сохраняется момент
импульса системы относительно таких осей (ось z на рис.1)
3. Если все внешние силы являются центральными с общим
центром, то моменты этих сил относительно центра О равны
нулю (alpha=0 и sin(alpha)=0). Поэтому сохраняется момент
импульса системы относительно этого центра О.(Рис.2)
13.
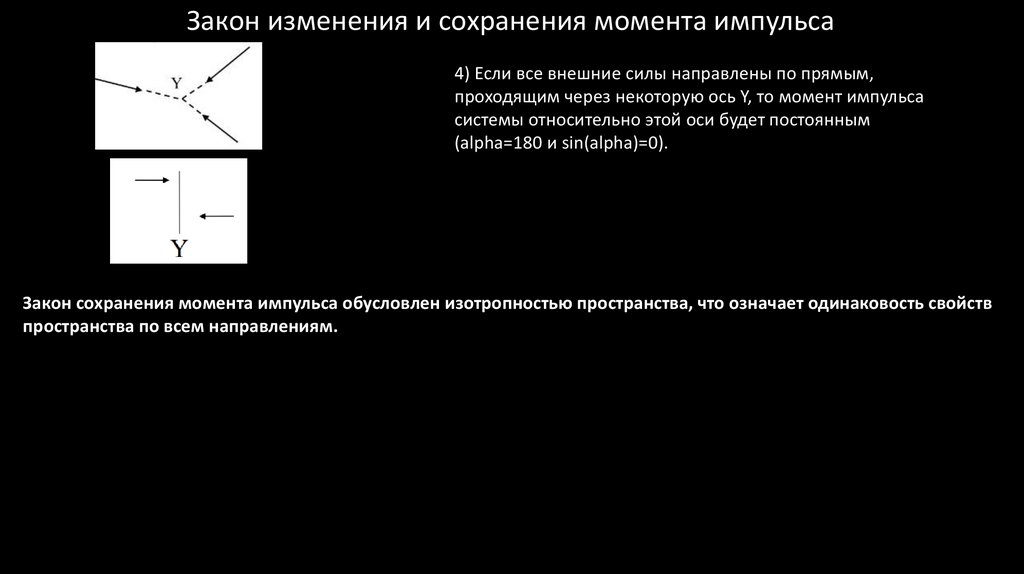
Закон изменения и сохранения момента импульса4) Если все внешние силы направлены по прямым,
проходящим через некоторую ось Y, то момент импульса
системы относительно этой оси будет постоянным
(alpha=180 и sin(alpha)=0).
Закон сохранения момента импульса обусловлен изотропностью пространства, что означает одинаковость свойств
пространства по всем направлениям.
14.
Абсолютно твердое телоПод твердым телом будем подразумевать абсолютно твердое тело, в котором расстояния между любыми двумя точками
неизменны. Твердое тело можно представить как совокупность большого количества очень малых масс Δmi , которые
можно считать.
Теорема о движении центра масс твердого тела:
центр масс твердого тела движется так, как двигалась бы материальная точка с массой, равной массе тела, и к которой
приложены все внешние силы, действующие на тело.
15.
Законы НьютонаI закон. Он полагает, что существуют такие системы отсчета,
в которых всякое тело будет сохранять первоначальное
состояние покоя или равномерного и прямолинейного
движения до тех пор, пока действие других тел не заставит
его изменить это состояние.
ll закон. Под действием силы тело приобретает такое
ускорение, что его произведение на массу тела равно
действующей силе.
lll закон. Силы, с которыми взаимодействующие тела
действуют друг на друга, равны по модулю и направлены по
одной прямой в противоположные стороны.
16.
Работа внешних сил при вращении твердого телаЭлементарная работа по перемещению элемента массой
где
— тангенциальная составляющая внешней силы
равна:
, действующей на элемент массой
Согласно закону сохранения энергии работа
равняется
приращению
кинетической энергии твердого тела. Таким образом, кинетическая
энергия вращающегося тела равна
(рис. 7.11).
17.
Список использованной литературы• Тарг С. М. Краткий курс теоретической механики: Учеб. для вузов.— 10-е изд., перераб. и доп. — М.: Высш. шк.,
1986.— 416 с.
• Савельев И.В. Курс общей физики, том I