




 physics
physics astronomy
astronomySimilar presentations:










Механика космического полета с малой тягой в сильных гравитационных полях планет. Математические модели движения
1.
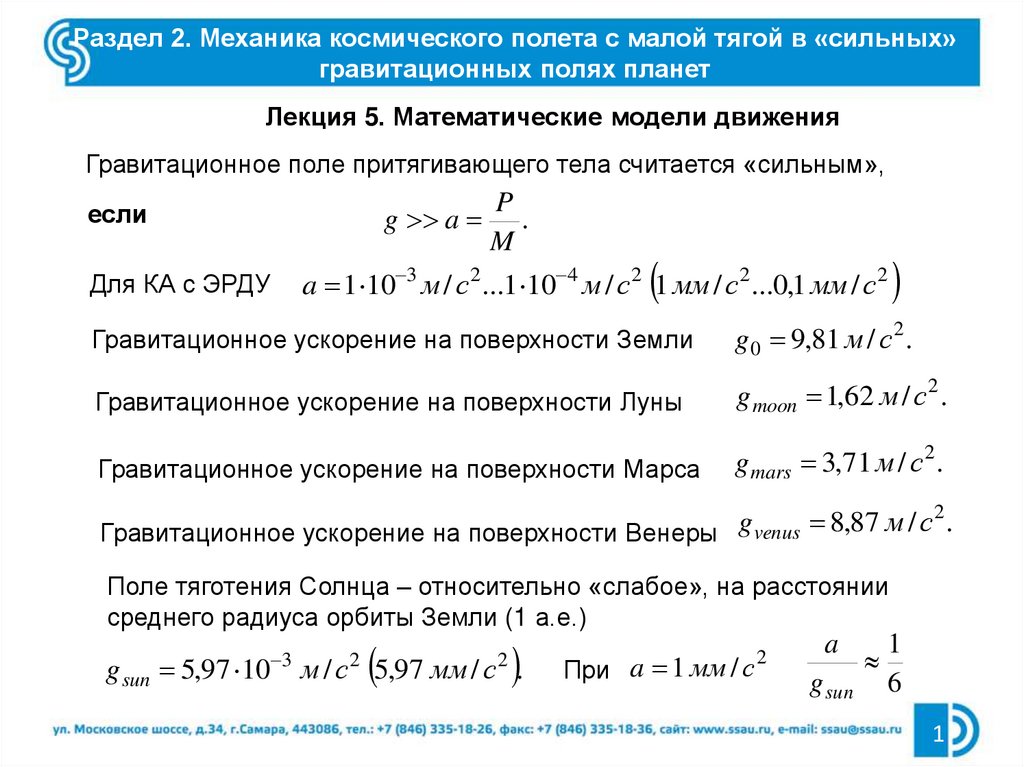
Раздел 2. Механика космического полета с малой тягой в «сильных»гравитационных полях планет
Лекция 5. Математические модели движения
Гравитационное поле притягивающего тела считается «сильным»,
g a
если
Для КА с ЭРДУ
P
.
M
a 1 10 3 м / с 2 ...1 10 4 м / с 2 1 мм / с 2 ...0,1 мм / с 2
Гравитационное ускорение на поверхности Земли
g 0 9,81 м / с 2 .
Гравитационное ускорение на поверхности Луны
g moon 1,62 м / с 2 .
Гравитационное ускорение на поверхности Марса
g mars 3,71 м / с 2 .
2
g
8
,
87
м
/
с
.
venus
Гравитационное ускорение на поверхности Венеры
Поле тяготения Солнца – относительно «слабое», на расстоянии
среднего радиуса орбиты Земли (1 а.е.)
3
g sun 5,97 10
2
2
м / с 5,97 мм / с .
При a 1 мм / с
2
a
g sun
1
6
1
2.
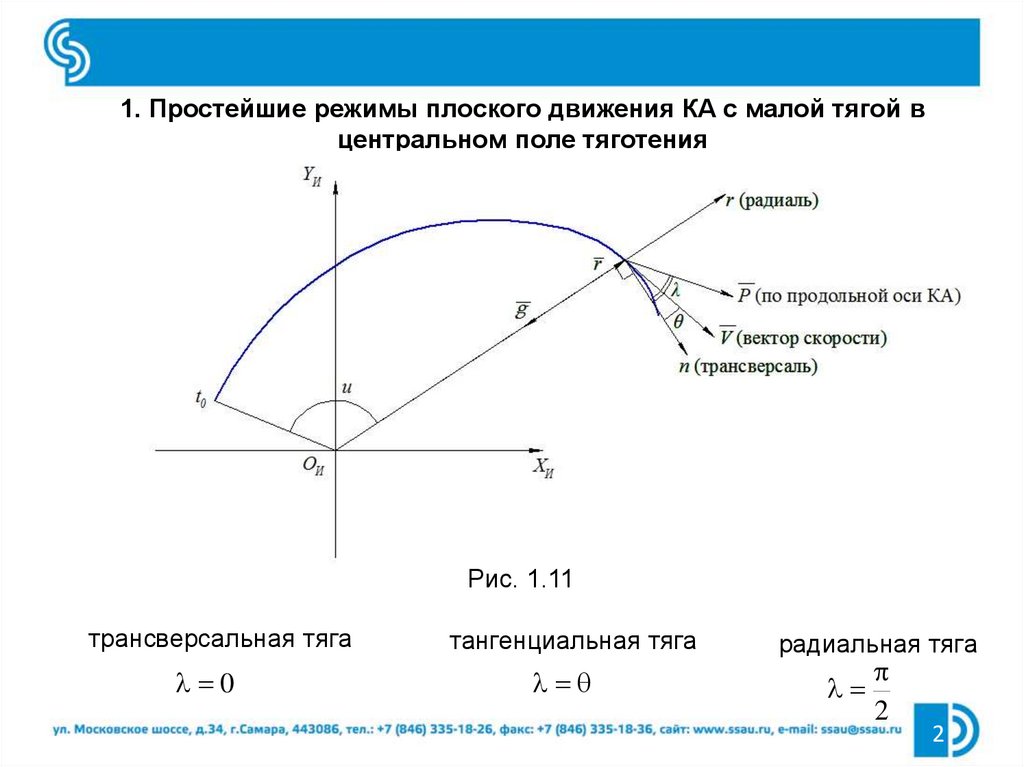
1. Простейшие режимы плоского движения КА с малой тягой вцентральном поле тяготения
Рис. 1.11
трансверсальная тяга
0
тангенциальная тяга
радиальная тяга
2
2
3.
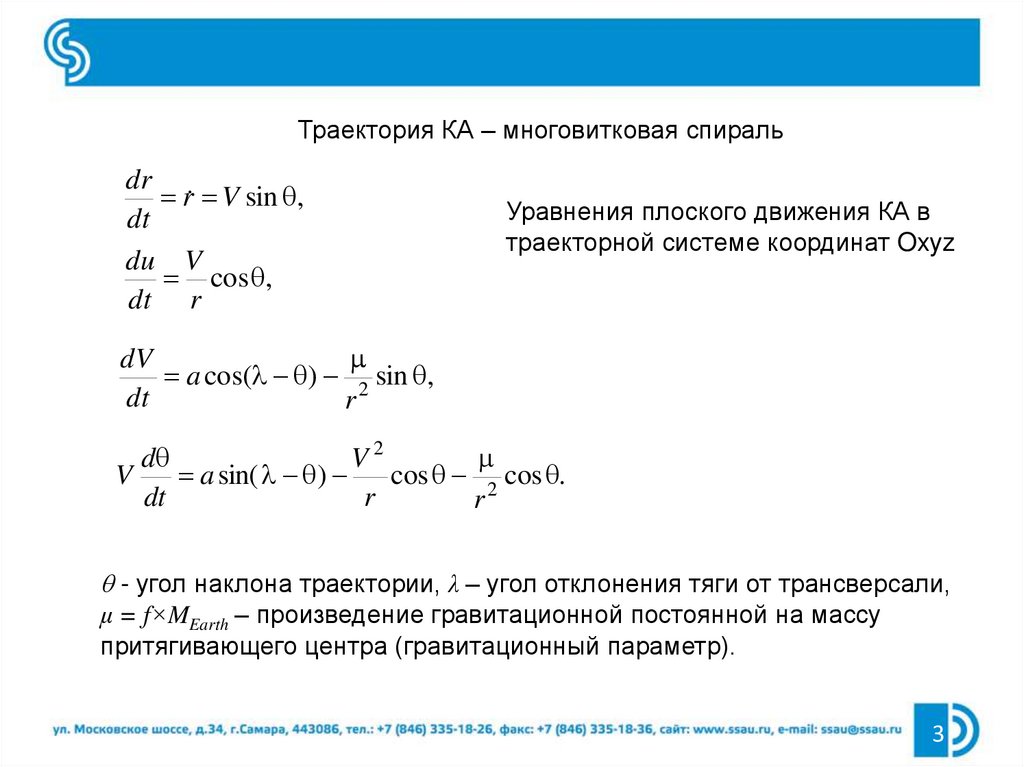
Траектория КА – многовитковая спиральdr
r V sin ,
dt
du V
cos ,
dt r
Уравнения плоского движения КА в
траекторной системе координат Oxyz
dV
a cos( ) 2 sin ,
dt
r
d
V2
V
a sin( )
cos 2 cos .
dt
r
r
- угол наклона траектории, λ – угол отклонения тяги от трансверсали,
μ = f×MEarth – произведение гравитационной постоянной на массу
притягивающего центра (гравитационный параметр).
3
4.
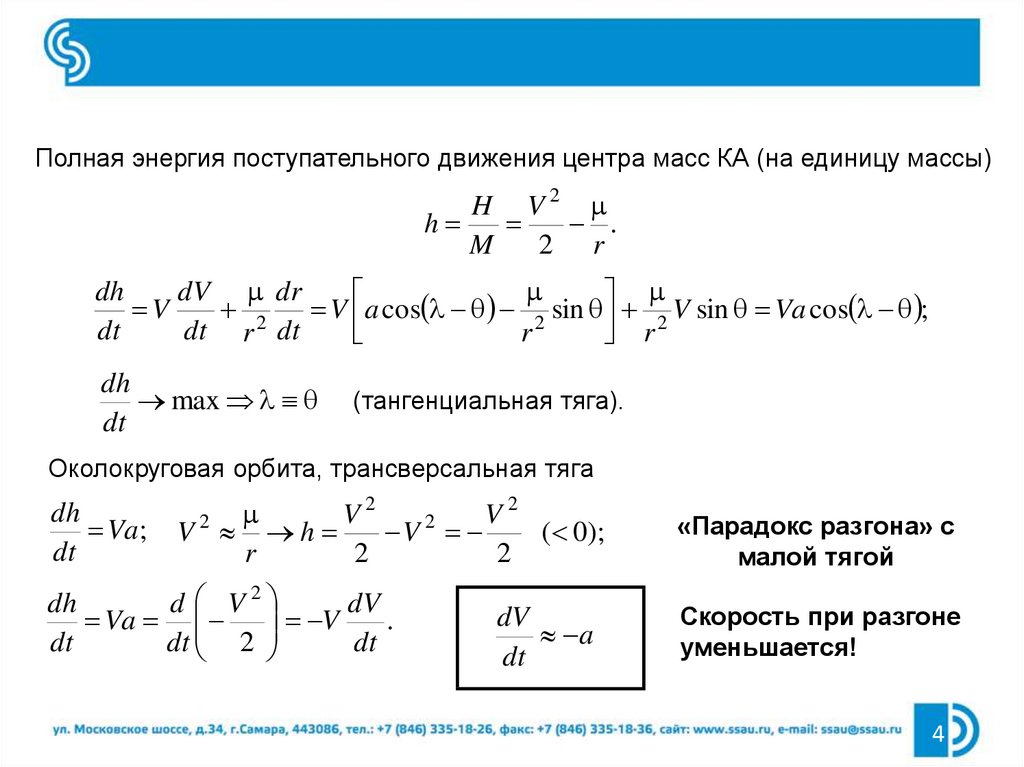
Полная энергия поступательного движения центра масс КА (на единицу массы)H V2
h
.
M
2 r
dh
dV dr
V
2
V a cos 2 sin 2 V sin Va cos ;
dt
dt r dt
r
r
dh
max
dt
(тангенциальная тяга).
Околокруговая орбита, трансверсальная тяга
dh
Va;
dt
V2
V2
2
V h
V
( 0);
r
2
2
2
dh
d V2
dV
V
Va
.
dt
dt 2
dt
dV
a
dt
«Парадокс разгона» с
малой тягой
Скорость при разгоне
уменьшается!
4
5.
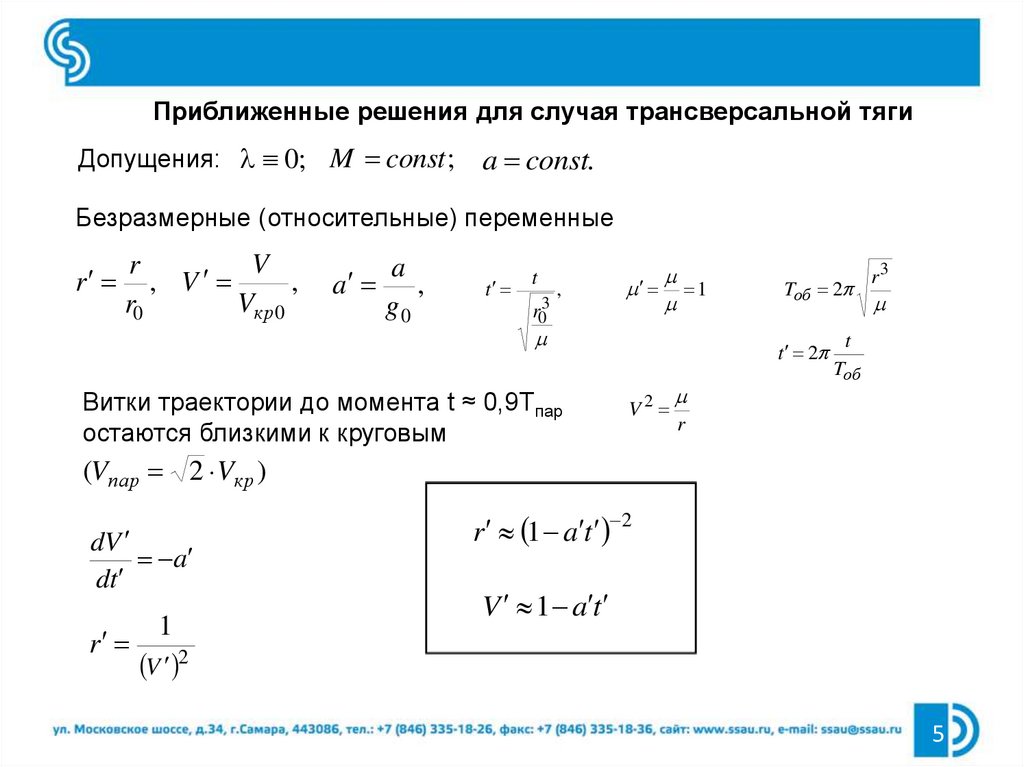
Приближенные решения для случая трансверсальной тягиДопущения: 0; M const ;
a const.
Безразмерные (относительные) переменные
r
V
r
,
, V
V
r0
кр 0
a
a
,
g0
t
t
r03
,
1
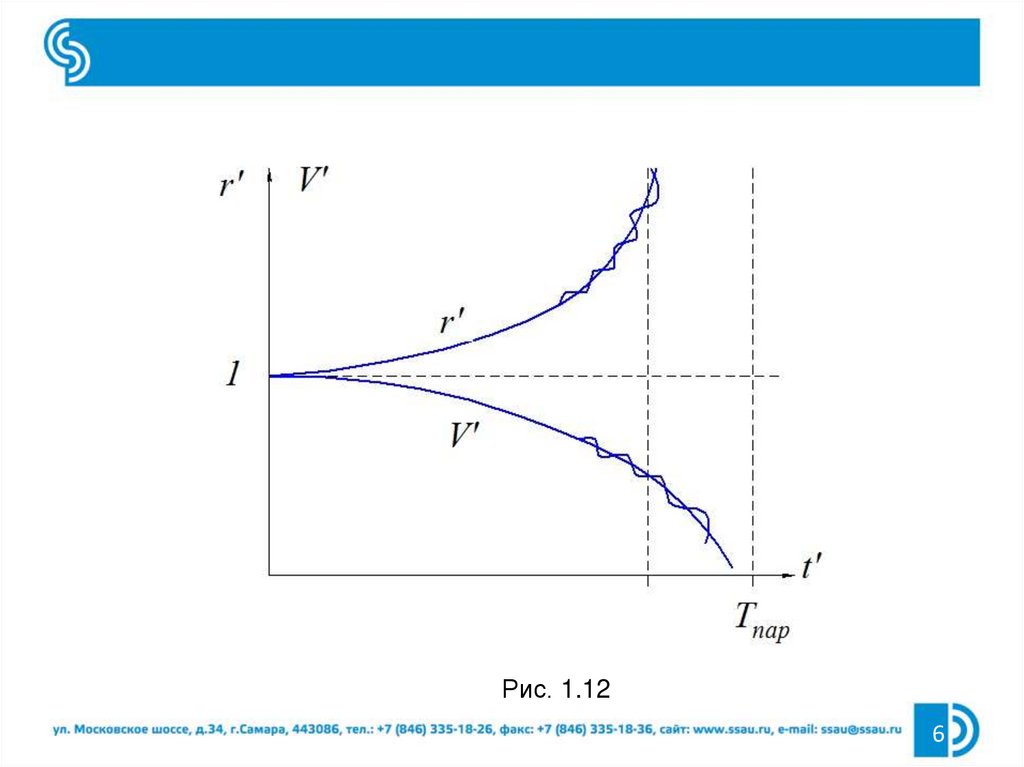
Витки траектории до момента t ≈ 0,9Tпар
остаются близкими к круговым
Tоб 2
t 2
V2
r3
t
Tоб
r
(Vпар 2 Vкр )
dV
a
dt
r
1
r 1 a t 2
V 1 a t
V 2
5
6.
Рис. 1.126
7.
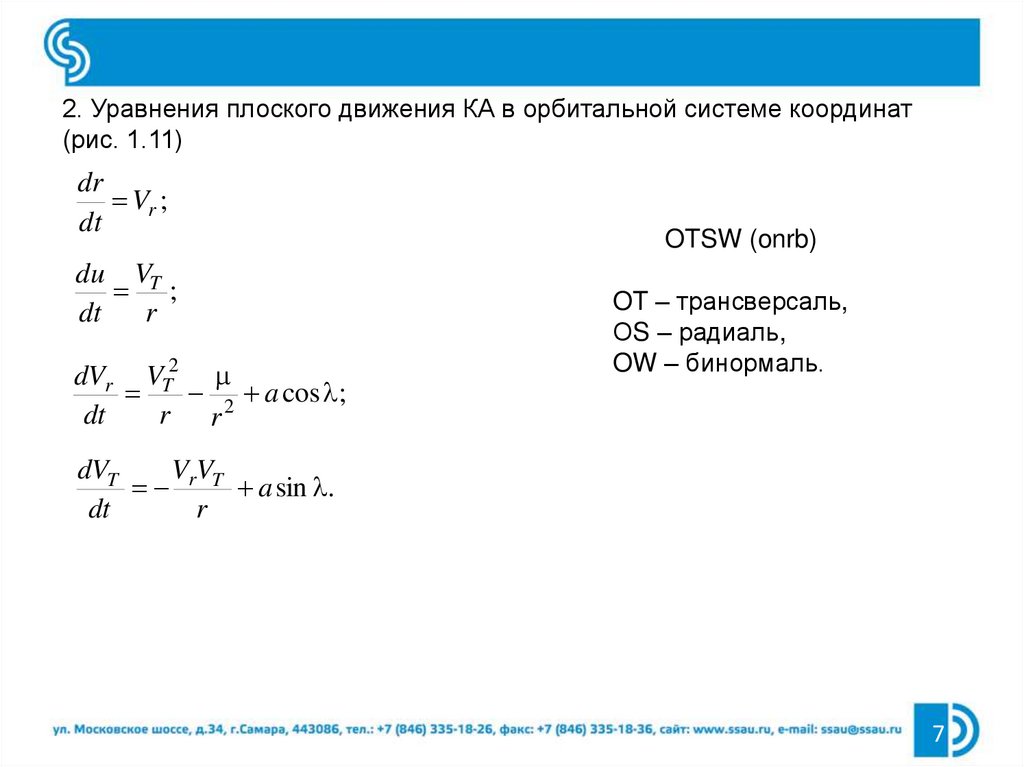
2. Уравнения плоского движения КА в орбитальной системе координат(рис. 1.11)
dr
Vr ;
dt
du VT
;
dt
r
dVr VT2
2 a cos ;
dt
r r
OTSW (onrb)
OT – трансверсаль,
ОS – радиаль,
OW – бинормаль.
VV
dVT
r T a sin .
dt
r
7
8.
Лекция 6. Математическая модель пространственногодвижения КА
2. Математическая модель движения КА в оскулирующих элементах
Направление на
точку весеннего
равноденствия
Рис. 1.13
8
9.
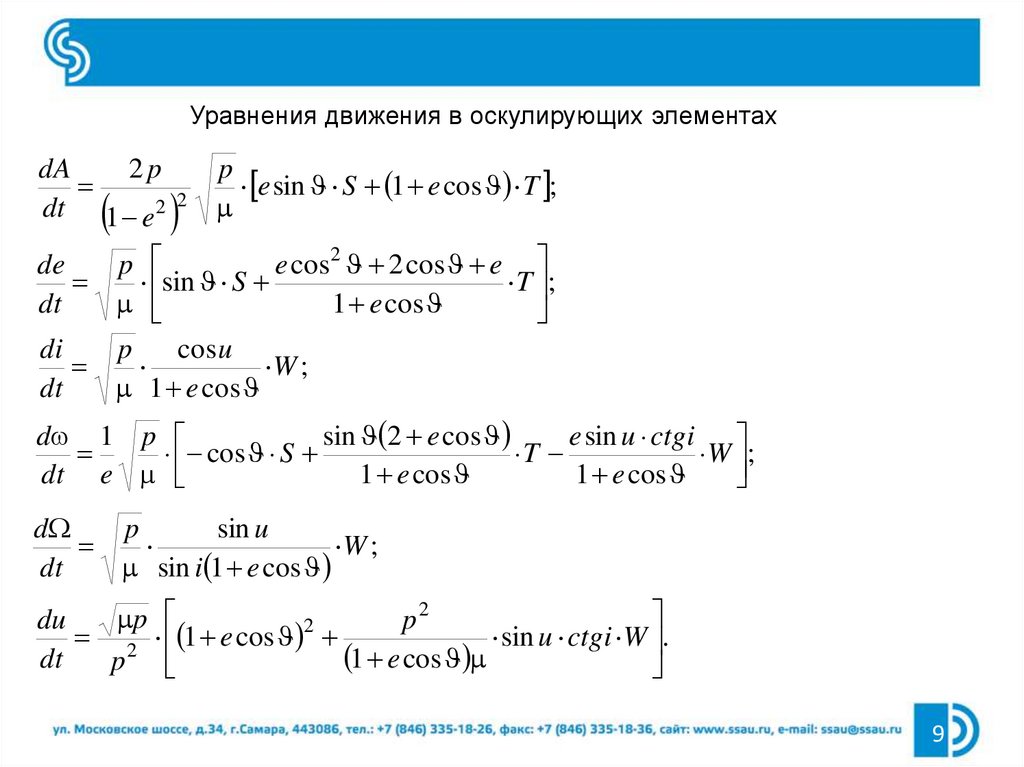
Уравнения движения в оскулирующих элементахdA
2p
dt 1 e 2
2
p
e sin S 1 e cos T ;
de
p
e cos2 2 cos e
sin S
T ;
dt
1 e cos
di
p
cos u
W ;
dt
1 e cos
d 1 p
sin 2 e cos
e sin u ctgi
cos S
T
W ;
dt e
1 e cos
1 e cos
d
p
sin u
W ;
dt
sin i 1 e cos
p
du
p2
2
2 1 e cos
sin u ctgi W .
1 e cos
dt
p
9
10.
Здесь p=A(1-e2) – фокальный параметр; ϑ = u – ω – истинная аномалия; e– эксцентриситет; ω – угловое расстояние перицентра от узла; Ω –
долгота восходящего узла; i – наклонение орбиты; t – время; u –
аргумент широты; S, T, W – проекции реактивного ускорения на
направление радиуса-вектора, на перпендикулярное к нему в плоскости
орбиты и на перпендикулярное к плоскости орбиты; μ=fM –
произведение гравитационной константы на массу притягивающего
центра.
Выражение для компонент реактивного ускорения в орбитальной
системе координат
T a cos cos ;
S a sin cos ;
W a sin .
Здесь a – модуль полного реактивного ускорения, δ – функция
включения-выключения двигателей (δ = {0, 1}); λ – угол ориентации
вектора тяги в плоскости орбиты (λ [00, 1800]); ψ – угол ориентации
вектора тяги в плоскости местного горизонта (ψ [-900, 900]).
10
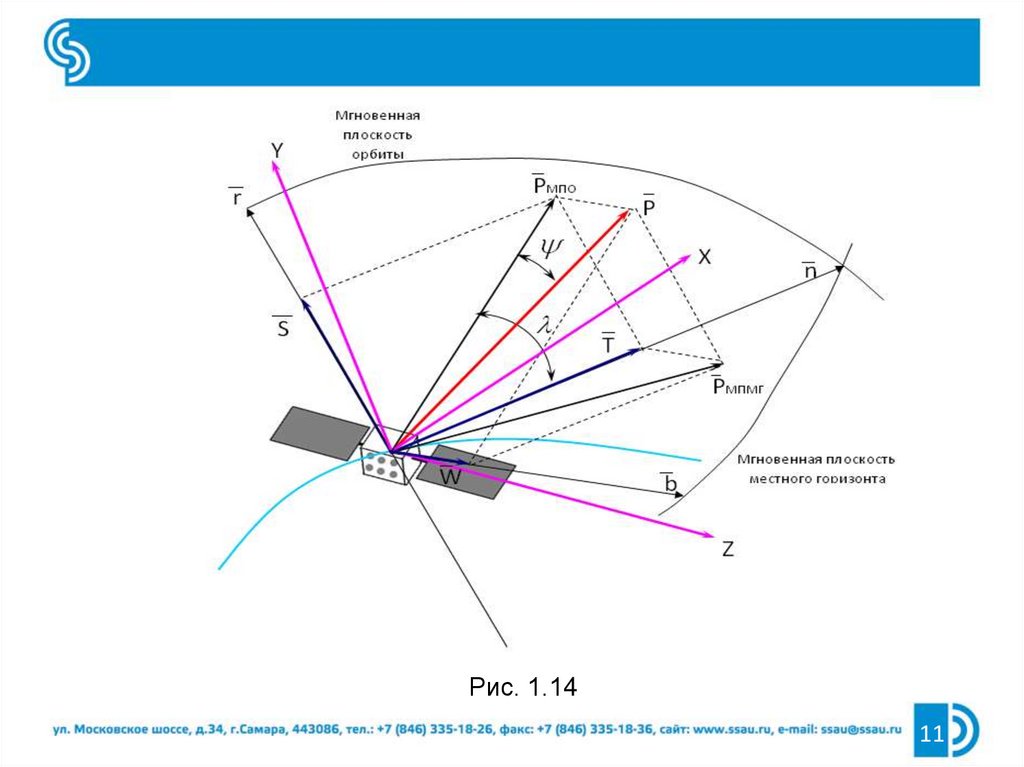
11.
Рис. 1.1411
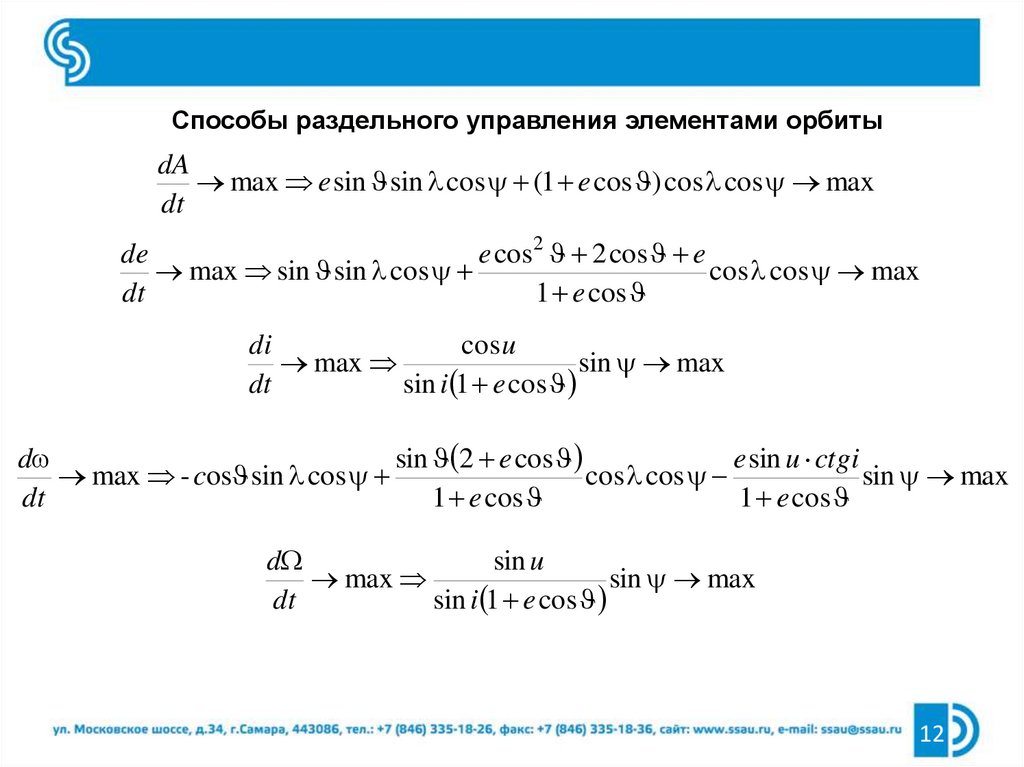
12.
Способы раздельного управления элементами орбитыdA
max e sin sin cos (1 e cos ) cos cos max
dt
de
e cos2 2 cos e
max sin sin cos
cos cos max
dt
1 e cos
di
cos u
max
sin max
dt
sin i 1 e cos
d
sin 2 e cos
e sin u ctgi
max - cos sin cos
cos cos
sin max
dt
1 e cos
1 e cos
d
sin u
max
sin max
dt
sin i 1 e cos
12
13.
Частный случай: околокруговые многовитковые траектории (е 0)Радиальная составляющая реактивного ускорения S = 0.
Трансверсальная Т и бинормальная W составляющие
dA
A
2A
T
dt
sign T sign A
de
A
2
cos T
dt
sign T sign cos
di
A
cos u W
dt
sign W sign cos u
d
A sin u
W
dt
sin i
sign W sign sin u
sin i
0 !
u – аргумент широты, угол между линией узлов HB и радиусом-вектором КА r,
лежит в плоскости оскулирующей орбиты;
- истинная аномалия, угол между направлением на перицентр (перигей) и
радиусом-вектором КА.
13
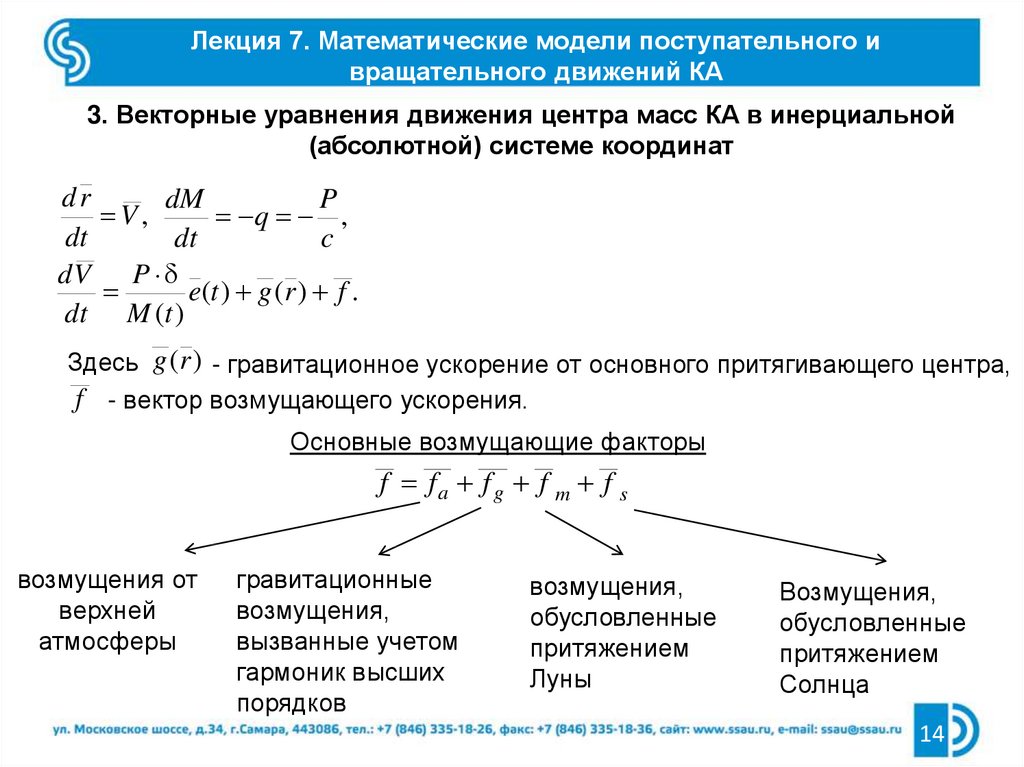
14.
Лекция 7. Математические модели поступательного ивращательного движений КА
3. Векторные уравнения движения центра масс КА в инерциальной
(абсолютной) системе координат
dr
dM
P
V,
q ,
dt
dt
c
dV P
e(t ) g (r ) f .
dt M (t )
Здесь g (r ) - гравитационное ускорение от основного притягивающего центра,
f - вектор возмущающего ускорения.
Основные возмущающие факторы
f fa f g f m f s
возмущения от
верхней
атмосферы
гравитационные
возмущения,
вызванные учетом
гармоник высших
порядков
возмущения,
обусловленные
притяжением
Луны
Возмущения,
обусловленные
притяжением
Солнца
14
15.
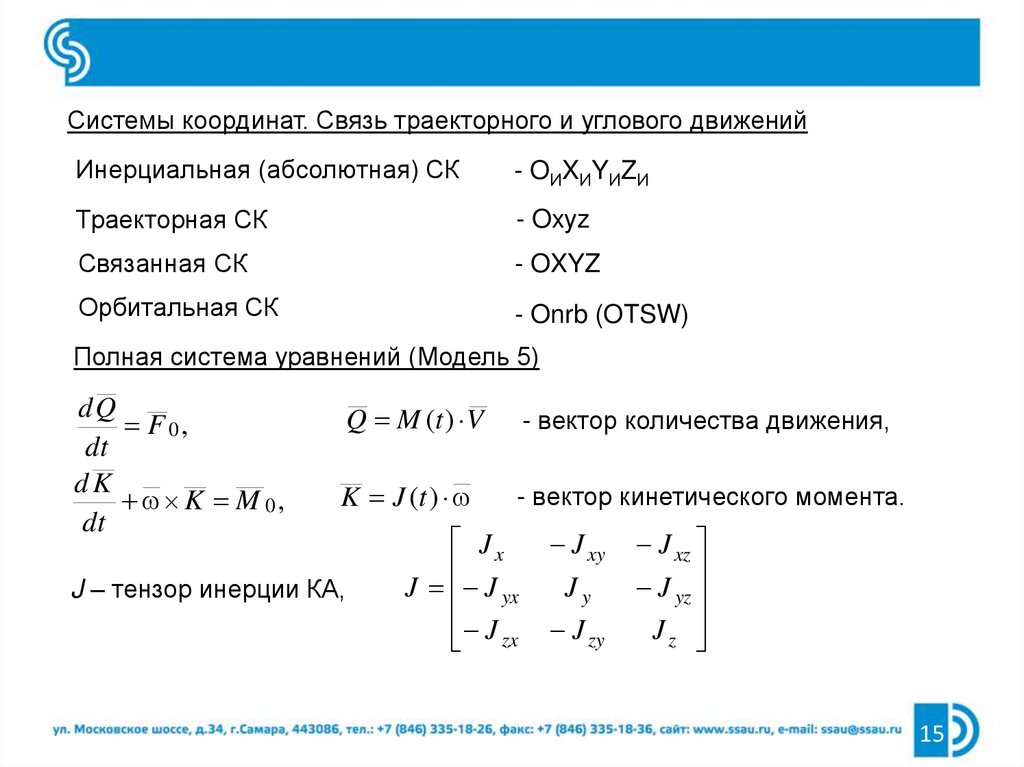
Системы координат. Связь траекторного и углового движенийИнерциальная (абсолютная) СК
- OИXИYИZИ
Траекторная СК
- Oxyz
Связанная СК
- OXYZ
Орбитальная СК
- Onrb (OTSW)
Полная система уравнений (Модель 5)
dQ
F 0,
dt
dK
K M 0 ,
dt
Q M (t ) V
- вектор количества движения,
K J (t )
- вектор кинетического момента.
J – тензор инерции КА,
Jx
J J yx
J zx
J xy
Jy
J zy
J xz
J yz
J z
15
16.
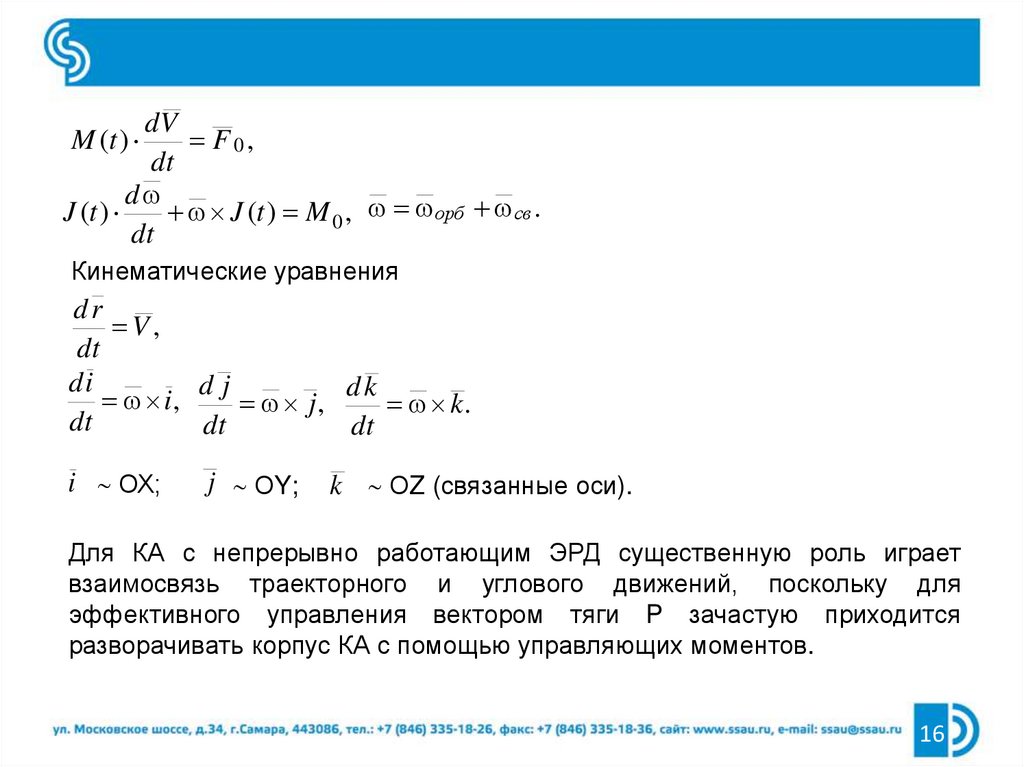
dVF 0,
dt
d
J (t )
J (t ) M 0 , орб св .
dt
M (t )
Кинематические уравнения
dr
V,
dt
di
dj
dk
i,
j,
k.
dt
dt
dt
i ОХ;
j ОY;
k ОZ (связанные оси).
Для КА с непрерывно работающим ЭРД существенную роль играет
взаимосвязь траекторного и углового движений, поскольку для
эффективного управления вектором тяги P зачастую приходится
разворачивать корпус КА с помощью управляющих моментов.
16
17.
Лекция 8. Выбор параметров околоземной орбиты старта примежорбитальных перелетах с малой тягой
Выбор высоты орбиты старта с учетом возмущающего влияния
верхней атмосферы Земли
Необходимое условие для осуществления маневров с малой
тягой на низких орбитах
Fцб
V 2
P Fa C Xa
Sm ,
2
Mg
a f
C Xa S m
V 2 x V 2
2M
Интегрально за виток
Tоб
Tоб
P
dt x V 2 dt
0 M
0
σx - баллистический коэффициент КА,
Рис. 1.15
ρ - плотность верхней атмосферы Земли,
Sm - площадь миделевого сечения КА.
б) x x0 1 cos u u0
a) x xcp const
(0,001 – 0,02 м2/кг)
Площадь миделя КА: Sm ≈ kSmax (максимальная площадь проекции КА+СБ)
17
18.
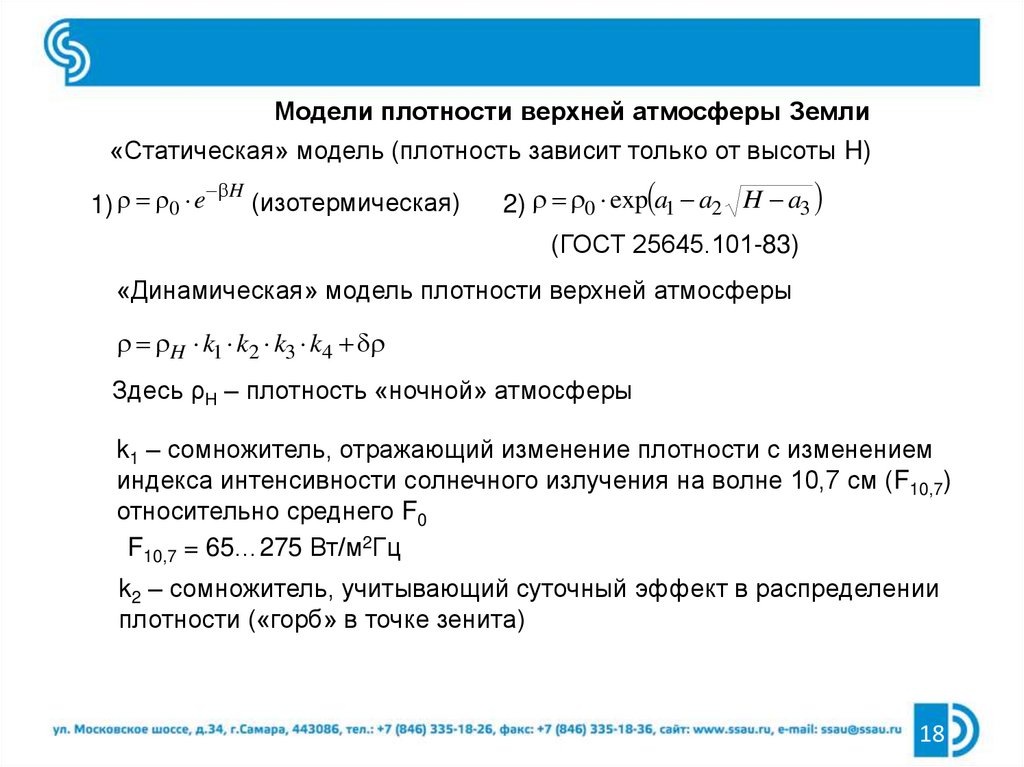
Модели плотности верхней атмосферы Земли«Статическая» модель (плотность зависит только от высоты H)
1) 0 e
H
(изотермическая)
2) 0 exp a1 a2 H a3
(ГОСТ 25645.101-83)
«Динамическая» модель плотности верхней атмосферы
H k1 k2 k3 k4
Здесь ρH – плотность «ночной» атмосферы
k1 – сомножитель, отражающий изменение плотности с изменением
индекса интенсивности солнечного излучения на волне 10,7 см (F10,7)
относительно среднего F0
F10,7 = 65…275 Вт/м2Гц
k2 – сомножитель, учитывающий суточный эффект в распределении
плотности («горб» в точке зенита)
18
19.
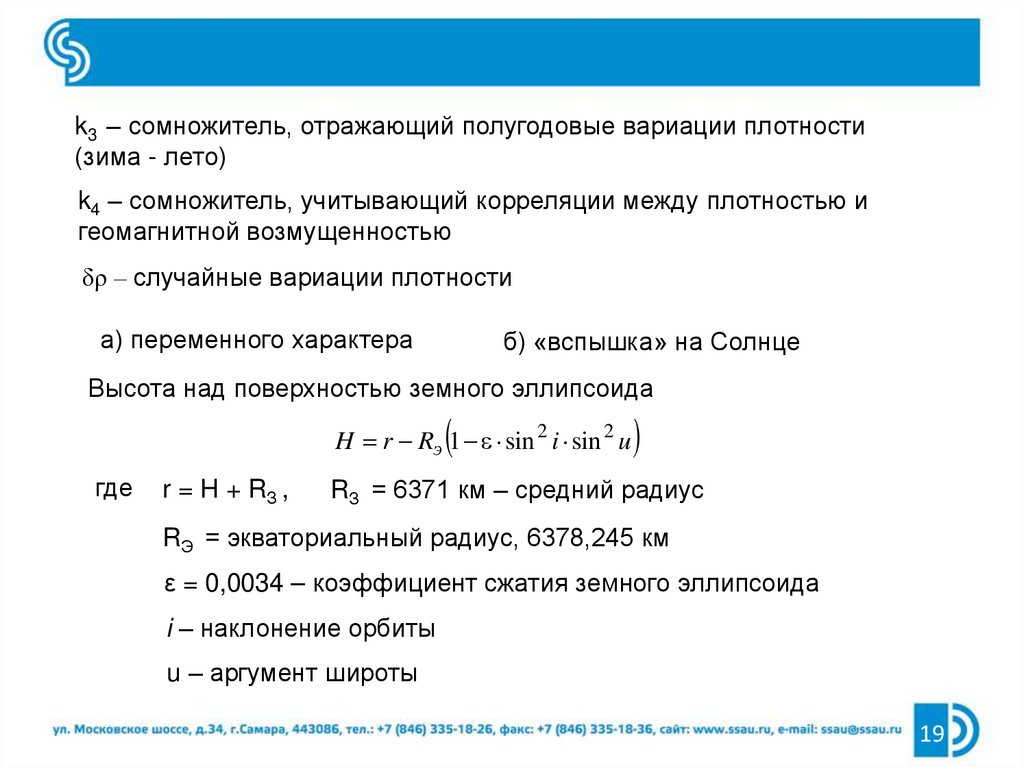
k3 – сомножитель, отражающий полугодовые вариации плотности(зима - лето)
k4 – сомножитель, учитывающий корреляции между плотностью и
геомагнитной возмущенностью
δρ – случайные вариации плотности
а) переменного характера
б) «вспышка» на Солнце
Высота над поверхностью земного эллипсоида
H r Rэ 1 sin 2 i sin 2 u
где
r = H + RЗ ,
RЗ = 6371 км – средний радиус
RЭ = экваториальный радиус, 6378,245 км
ε = 0,0034 – коэффициент сжатия земного эллипсоида
i – наклонение орбиты
u – аргумент широты
19
20.
а)в)
б)
Рис. 1.16
20
21.
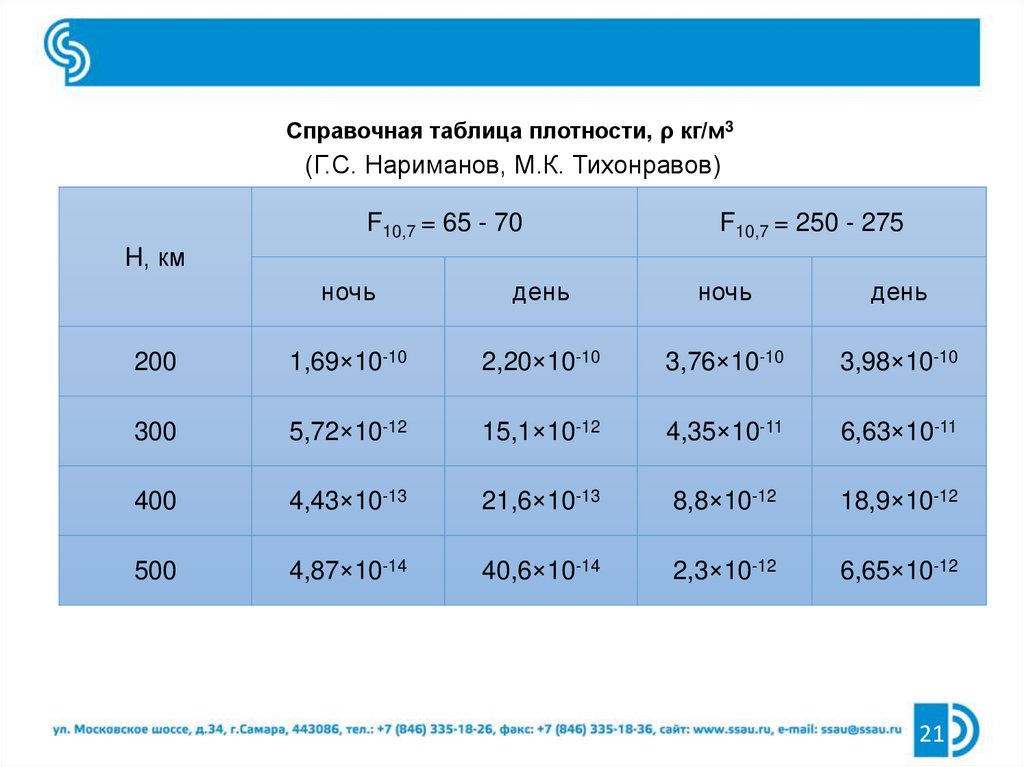
Справочная таблица плотности, ρ кг/м3(Г.С. Нариманов, М.К. Тихонравов)
F10,7 = 65 - 70
F10,7 = 250 - 275
H, км
ночь
день
ночь
день
200
1,69×10-10
2,20×10-10
3,76×10-10
3,98×10-10
300
5,72×10-12
15,1×10-12
4,35×10-11
6,63×10-11
400
4,43×10-13
21,6×10-13
8,8×10-12
18,9×10-12
500
4,87×10-14
40,6×10-14
2,3×10-12
6,65×10-12
21
22.
Лекция 9. Выбор параметров околоземной орбиты старта2. Выбор оптимальной даты старта из
условия минимума суммарного времени
нахождения КА в тени Земли
Особенности полета КА с ЭРДУ
- периодическое попадание КА в тень Земли
а) ЭРДУ выключается из-за отсутствия энергии
б) задействуются буферные аккумуляторные батареи
для обеспечения работы бортовых систем.
Включение ЭРДУ требует увеличения емкости
(массы) АБ
22
23.
Физическая картина взаимного положения Солнца,Земли и КА при межорбитальных перелетах
- плоскость орбиты КА постоянно изменяется вследствие
а) работы ЭРДУ
б) прецессии орбиты вследствие сжатия Земли
(изменение Ω)
в) из-за большой (90 – 150 суток) продолжительности
перелета Земля перемещается по эклиптике
(ω3 ≈ 1 градус/сутки)
23
24.
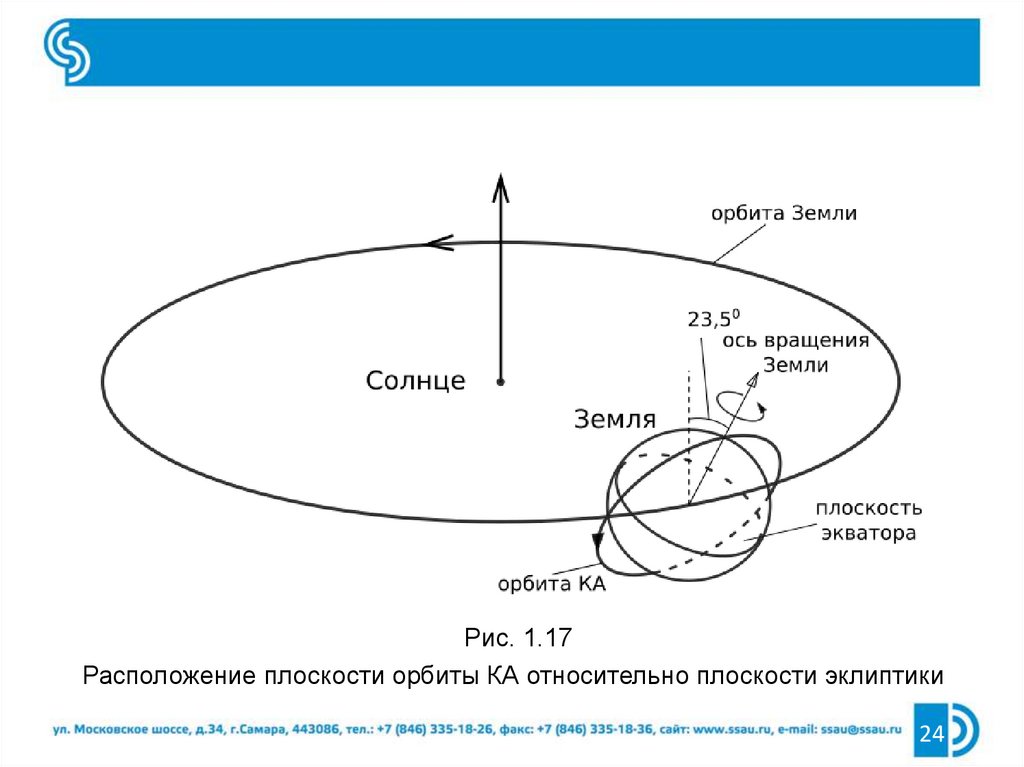
Рис. 1.17Расположение плоскости орбиты КА относительно плоскости эклиптики
24
25.
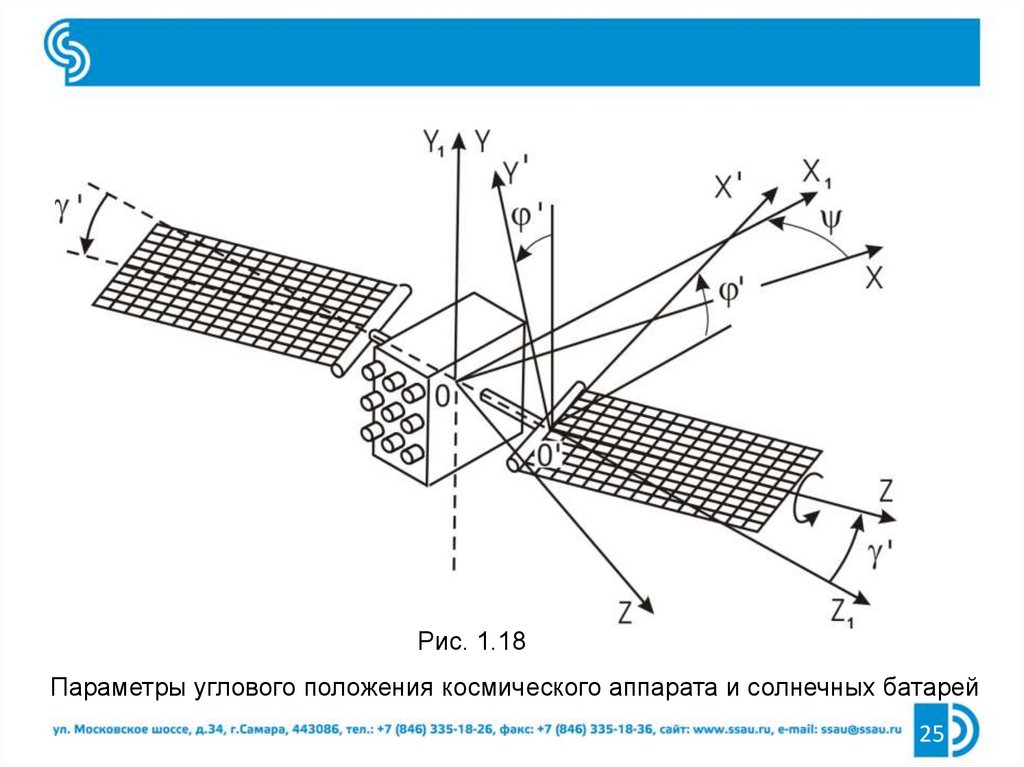
Рис. 1.18Параметры углового положения космического аппарата и солнечных батарей
25
26.
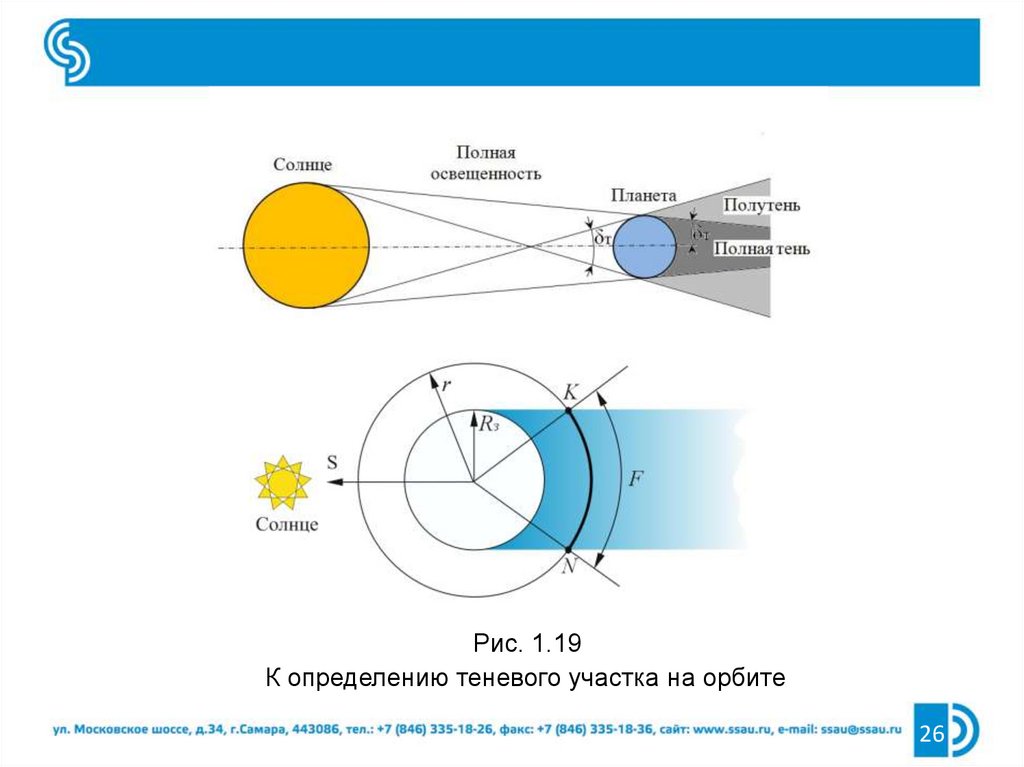
Рис. 1.19К определению теневого участка на орбите
26
27.
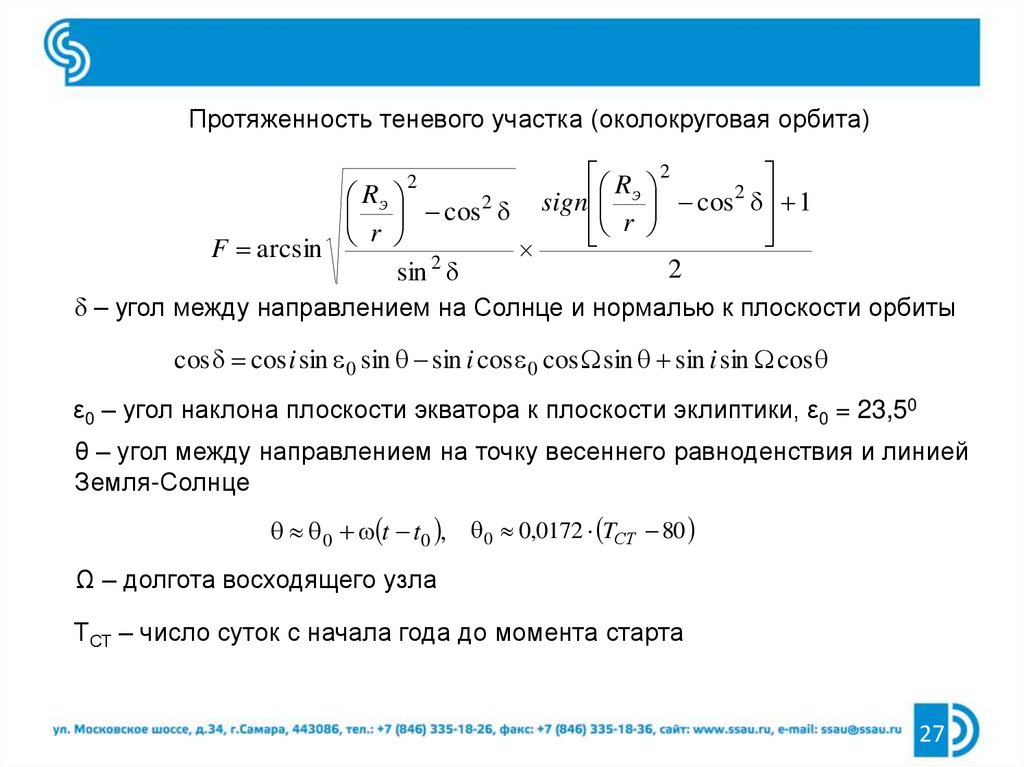
Протяженность теневого участка (околокруговая орбита)R 2
2
э
R
э
2
cos sign r cos 1
r
F arcsin
2
2
sin
δ – угол между направлением на Солнце и нормалью к плоскости орбиты
2
cos cos i sin 0 sin sin i cos 0 cos sin sin i sin cos
ε0 – угол наклона плоскости экватора к плоскости эклиптики, ε0 = 23,50
θ – угол между направлением на точку весеннего равноденствия и линией
Земля-Солнце
0 t t0 , 0 0,0172 TСТ 80
Ω – долгота восходящего узла
ТСТ – число суток с начала года до момента старта
27
28.
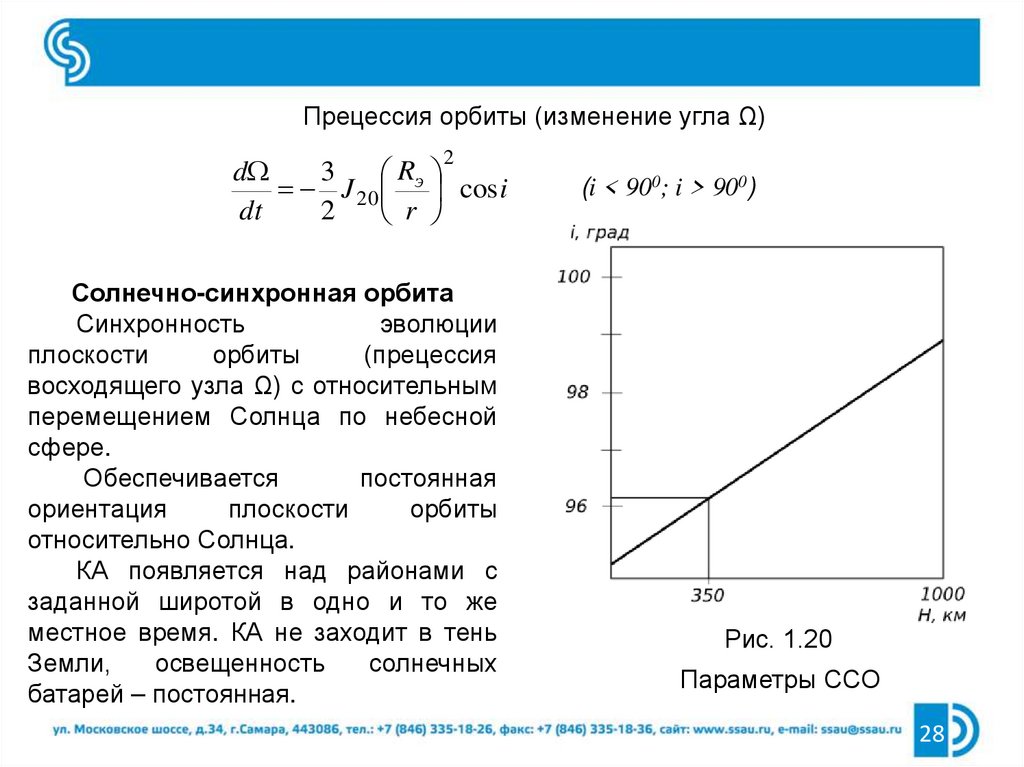
Прецессия орбиты (изменение угла Ω)2
d
3
R
J 20 э cos i
dt
2
r
Солнечно-синхронная орбита
Синхронность
эволюции
плоскости
орбиты
(прецессия
восходящего узла Ω) с относительным
перемещением Солнца по небесной
сфере.
Обеспечивается
постоянная
ориентация
плоскости
орбиты
относительно Солнца.
КА появляется над районами с
заданной широтой в одно и то же
местное время. КА не заходит в тень
Земли,
освещенность
солнечных
батарей – постоянная.
(i < 900; i > 900)
Рис. 1.20
Параметры ССО
28
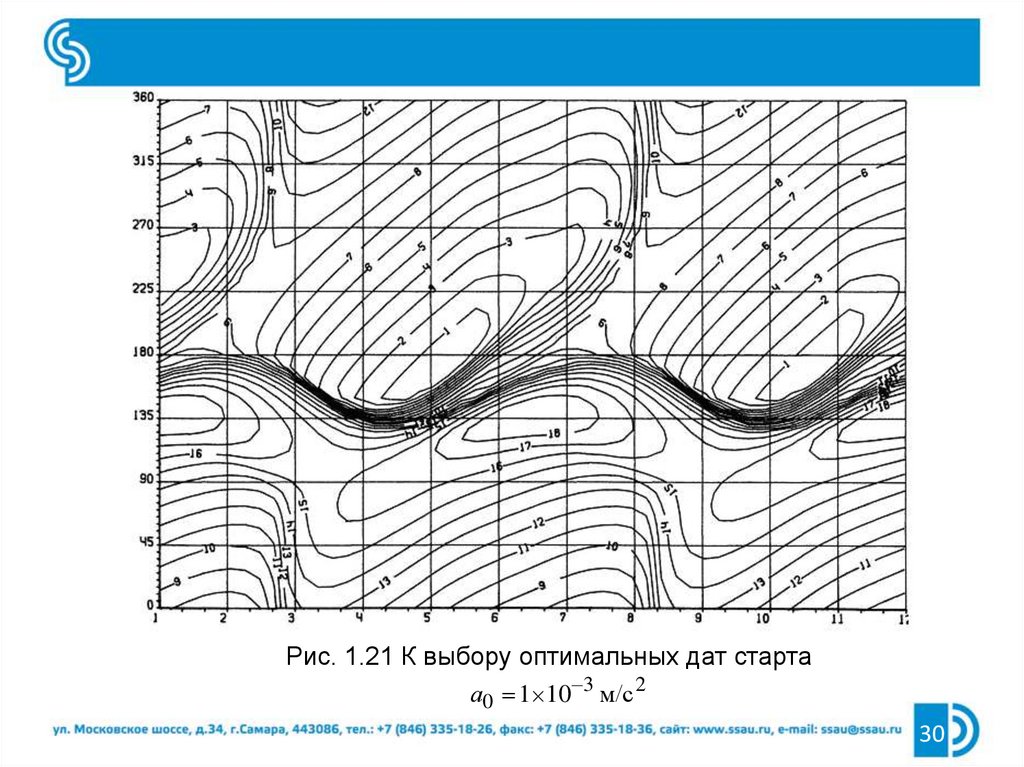
29.
Расчет суммарного времени затененияс tвых i tвх i
N
i 1
N – число витков траектории перелета
T
N Fj
1 пер
c
Fdt t
2 0
j 12
Параметры расчета: ТСТ, Ω0
ТСТ – число суток с начала года до момента старта с опорной орбиты
Параметры расчета перебираются с высокой дискретностью,
формируется массив значений τс , значения обрабатываются
специальной программой (сплайн – аппроксимация) и наносится на
плоскость: Ω0 – ТСТ .
Оптимальные даты старта (τс ≈ 0) повторяются с периодичностью в
6 месяцев.
29
30.
Рис. 1.21 К выбору оптимальных дат стартаа0 1 10 3 м/с 2
30