























 drafting
draftingSimilar presentations:


")



")

")

Поверхности. Задание поверхности на чертеже
1. Поверхности
Горячкина А.Ю.2.
Поверхность – множество положений движущейся в пространстве линии.Поверхность – непрерывное двупараметрическое множество точек.
Все поверхности можно изобразить на плоскости, задавая проекции
линий и точек, принадлежащих поверхности.
Поверхность считается заданной на чертеже, если можно построить
проекцию любой точки, ей принадлежащей.
Задание поверхности на чертеже
1. Определителем – совокупностью геометрических элементов,
позволяющих реализовать закон образования поверхности
2. Каркасом – семейством линий или точек
3. Очерком – проекцией контурной линии поверхности
3.
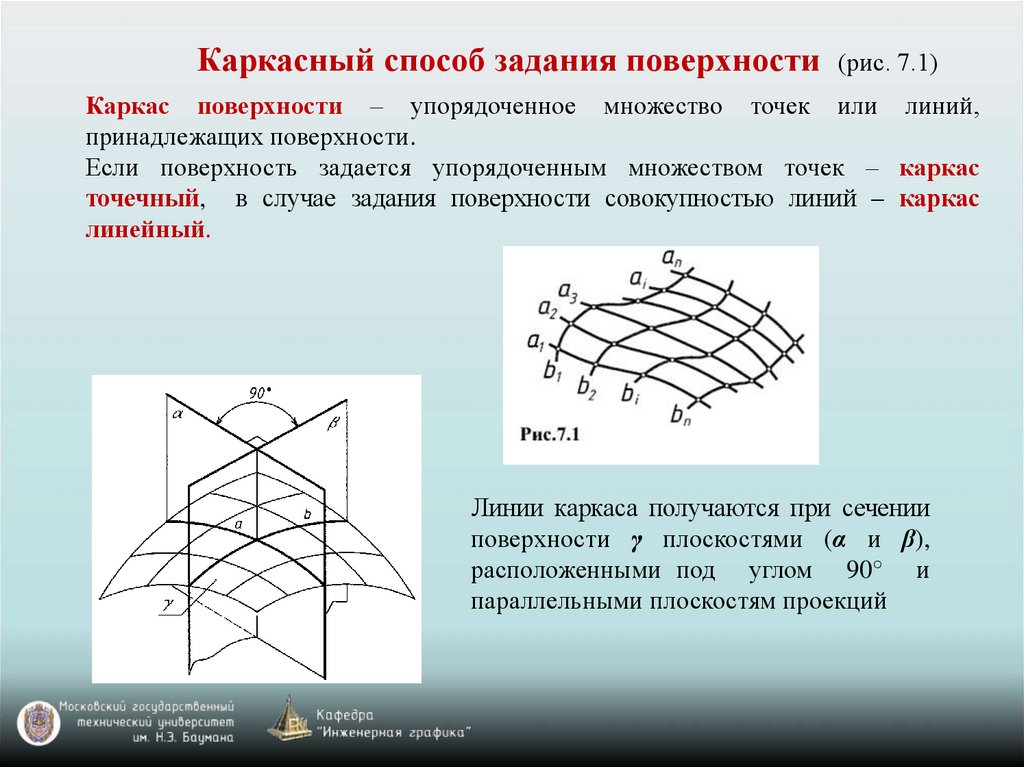
Каркасный способ задания поверхности(рис. 7.1)
Каркас поверхности – упорядоченное множество точек или линий,
принадлежащих поверхности.
Если поверхность задается упорядоченным множеством точек – каркас
точечный, в случае задания поверхности совокупностью линий – каркас
линейный.
Линии каркаса получаются при сечении
поверхности γ плоскостями (α и β),
расположенными под углом 90° и
параллельными плоскостям проекций
4.
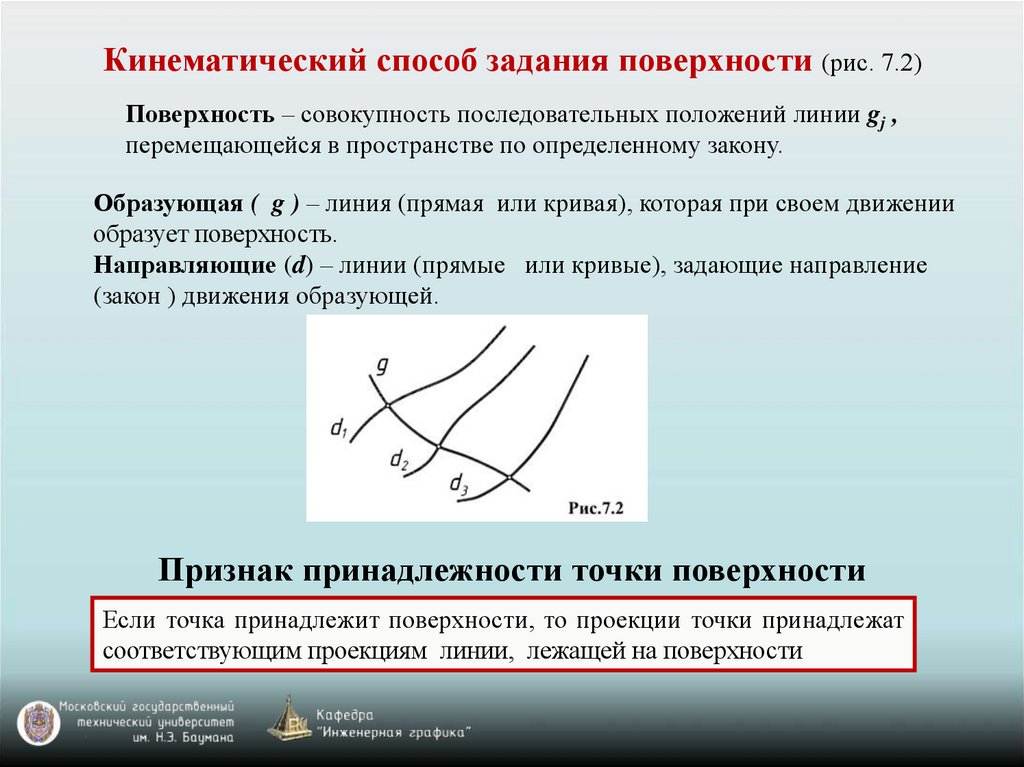
Кинематический способ задания поверхности (рис. 7.2)Поверхность – совокупность последовательных положений линии gj ,
перемещающейся в пространстве по определенному закону.
Образующая ( g ) – линия (прямая или кривая), которая при своем движении
образует поверхность.
Направляющие (d) – линии (прямые или кривые), задающие направление
(закон ) движения образующей.
Признак принадлежности точки поверхности
Если точка принадлежит поверхности, то проекции точки принадлежат
соответствующим проекциям линии, лежащей на поверхности
5.
Определитель поверхностиОпределитель поверхности – необходимая и достаточная совокупность
геометрических фигур и связей между ними, которые однозначно
определяют поверхность.
Ф (Г); [A]
(Г) – геометрическая часть ( указывает, какие геометрические фигуры
принимают участие в образовании поверхности);
[A] – алгоритмическая часть ( содержит сведения о законе перемещения
геометрической фигуры, входящей в первую часть определителя. Если
образующая линия (поверхность) меняет в процессе образования поверхности
свою форму и размеры, то и указания о законе этих изменений
Ф (g, d1 , d2 , d3); [gi ∩ {d1 , d2 , d3} ≠ Ø] (рис. 7.2)
6.
Классификация поверхностей2 класс
1 класс
подкласс 1
группа 1.А
Ф (g, d); [ gi = Td (g)]
подкласс 2
группа 1.Б
Ф (g, i); [ gi = Ri (g)]
подкласс 3
Ф (g, i); [ gi = Ti (g) ○ Ri (g)]
7.
Поверхности нелинейчатыес образующей переменного вида
с образующей постоянного вида
Каналовая поверхность
Трубчатая поверхность
Циклическая поверхность
8.
Поверхности линейчатые9.
Линейчатые поверхности с тремя направляющимиФ (g, d1 , d2 , d3); [gi ∩ {d1 , d2 , d3} ≠ Ø]
Косой цилиндр
с тремя направляющими
Дважды косой
цилиндроид
Рис. 7.3
Дважды косой
коноид
Однополостной
гиперболоид
10.
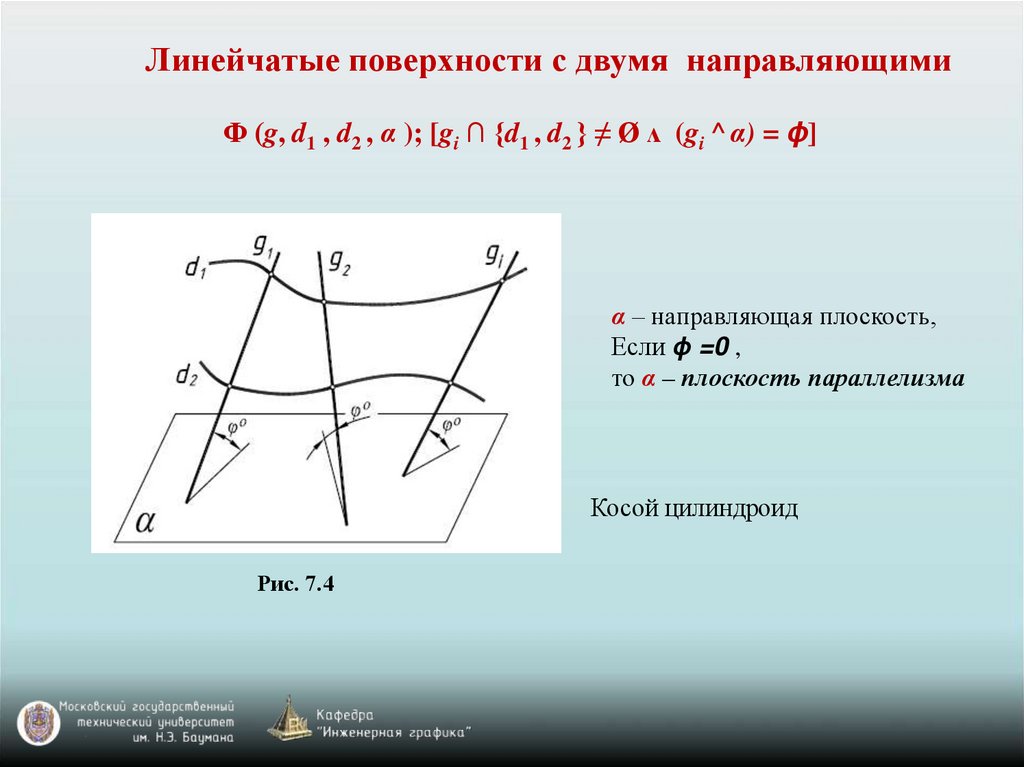
Линейчатые поверхности с двумя направляющимиФ (g, d1 , d2 , α ); [gi ∩ {d1 , d2 } ≠ Ø ᴧ (gi ^ α) = ϕ]
α – направляющая плоскость,
Если ϕ =0 ,
то α – плоскость параллелизма
Косой цилиндроид
Рис. 7.4
11.
Линейчатые поверхности с двумя направляющими иплоскостью параллелизма (поверхности Каталана)
Ф (g, d1 , d2 , α ); [gi ∩ {d1 , d2 } ≠ Ø ᴧ (gi ^ α) = 0o]
Косая плоскость
g║α
Поверхность прямого цилиндроида
Поверхность прямого коноида
12.
Поверхности Каталана.Прямой цилиндроид
Ф (g, d1 , d2 , α ); [gi ∩ {d1 , d2 } ≠ Ø ᴧ (gi ^ α) = 0]
B"
2"
12"
6"
11"
A"
d1" 1"
3"
gi"
4"
8"
d2"
9"
10"
5"
f0α
7"
x
h0α
7'
5'
9'
3'
d1'
d2'
10'
1'
A'
B'
8'
11'
6'
12'
4'
2'
gi'
Рис. 7.5
13.
Гиперболический параболоид (косая плоскость)Ф (g, d1 , d2 , α ); [gi ∩ {d1 , d2 } ≠ Ø ᴧ (gi ^ α) = 0o]
l"
d1"
1"
d2"
9"
2"
10"
4"
3"
11"
5"
6"
A"
7"
f0α
8"
12"
x
7'
9'
5'
3'
2'
4'
10'
1'
A'
d1'
l'
8'
d2'
Рис. 7.6
6'
12'
Косая плоскость формируется
при движении прямой по двум
скрещивающимся
прямолинейным направляющим,
при этом образующая все время
параллельна
плоскости
параллелизма.
14.
Линейчатые поверхности с одной направляющейГруппа линейчатых поверхностей с одной криволинейной
направляющей называется торсами, а криволинейная направляющая таких
поверхностей – ребром возврата.
Торсом называют поверхность, описываемую движением прямой (g),
касающейся некоторой пространственной кривой – направляющей d.
Ф (g, d1 , S ); [gi ∩ d1 = Si
d1]
15.
Поверхность с ребром возвратаg"
B"
A"
d"
x
d'
g'
A'
Рис. 7.7
Рис. 7.8
B'
16.
Цилиндрическая поверхностьg1"
A"
d"
d'
g"
B"
B'
g'
A'
g1'
Рис. 7.9
Рис. 7.11
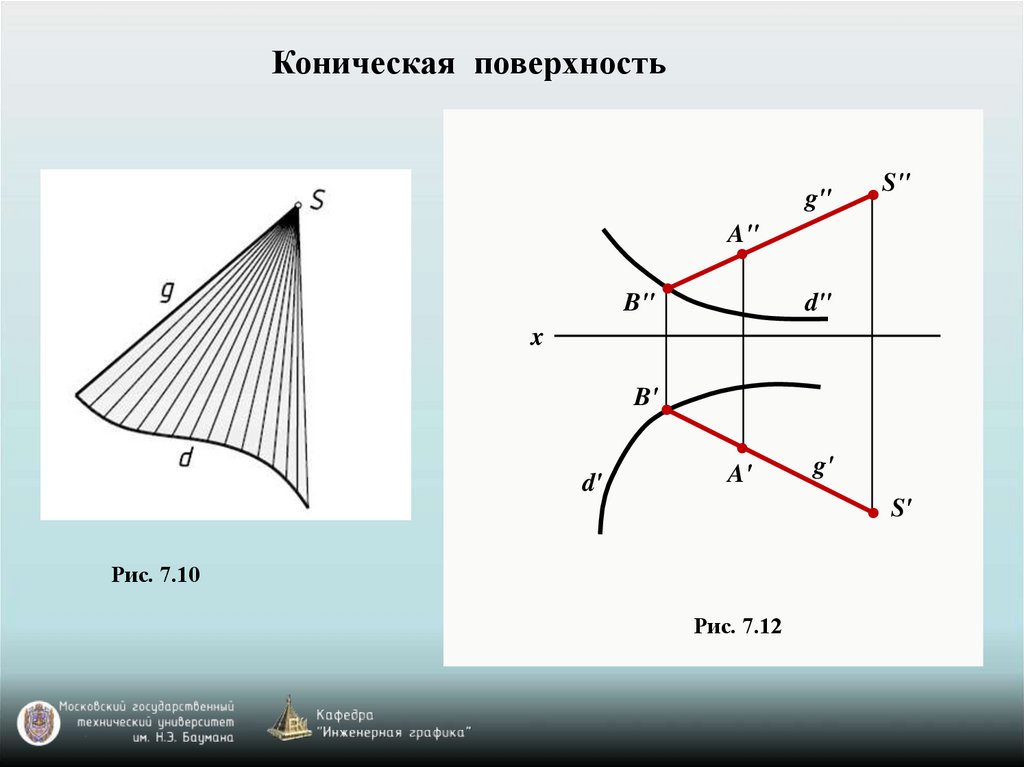
17.
Коническая поверхностьg"
S"
A"
B"
d"
x
B'
d'
A'
g'
S'
Рис. 7.10
Рис. 7.12
18.
Подклассы поверхностейДвижение образующей g может быть задано:
- направляющими линиями d;
- законом движения образующей, а именно:
- поступательным;
- вращательным;
- винтовым
Поверхности параллельного переноса (сдвига)
– формируются при движении образующей g вдоль оси переноса. Все
точки образующей перемещаются поступательно (рис. 7.13)
d
Рис. 7.13
g
19.
Поверхности вращения- формируются при вращении образующей (прямой или кривой) вокруг
неподвижной оси вращения (рис. 7.14). Каждая точка образующей (A, B, C)
перемещается по окружности (a, b, c) с центром на оси вращения.
i – ось вращения
g – образующая
a, b, c – параллели
b – экватор (наибольшая параллель)
c – горло (наименьшая параллель)
μ – меридиональная плоскость
i
Рис. 7.14
Очерк поверхности – границы
видимости поверхности по отношению
к плоскостям проекций
μ
m – меридиан
μ0 – плоскость главного меридиана
μ0 ║π
m0 – главный меридиан
20.
i"f0α
a"
A"
g"
Вращение – перемещение точки по
A1"
окружности
в
плоскости,
перпендикулярной оси вращения.
Пересечение плоскости вращения с
осью вращения – центр вращения.
Расстояние от
точки до центра
вращения – радиус вращения
O"
x
i'≡O'
g'
a'
A1'
A'
Рис. 7.15
21.
Поверхности вращения с прямолинейной образующейЦилиндрическая
поверхность
вращения
g║i
Коническая
поверхность
вращения
g∩i
Рис. 7.16
Однополостный
гиперболоид
вращения
g
i
22.
Цилиндрическая поверхность5"
2"
1"
3"
5‴
4‴
4"
z
m"
m‴
1‴
x
y2
y2
y
1'
m'
2'
3'
4'
5'
Рис. 7.17
2‴
3‴
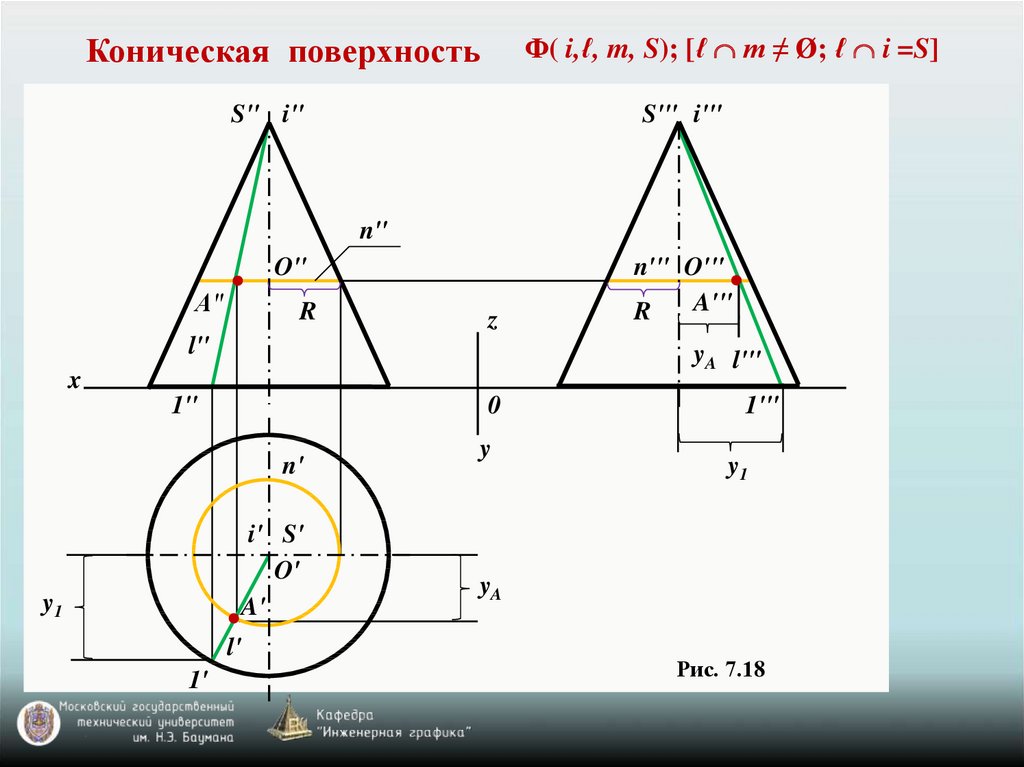
23.
Ф( i,ℓ, m, S); [ℓ m ≠ Ø; ℓ i =S]Коническая поверхность
S" i"
S'" i'"
n"
O"
А"
R
z
l"
yA l'"
x
1"
0
n'
i' S'
O'
A'
y1
l'
1'
n'" O'"
A'"
R
y
1'"
y1
yA
Рис. 7.18
24.
Поверхности вращения с образующей окружностьюРис. 7.19
Тор – поверхность, образованная
вращением окружности вокруг
оси, не проходящей через центр
этой окружности
Рис. 7.20
При вращении окружности вокруг
ее диаметра образуется сфера
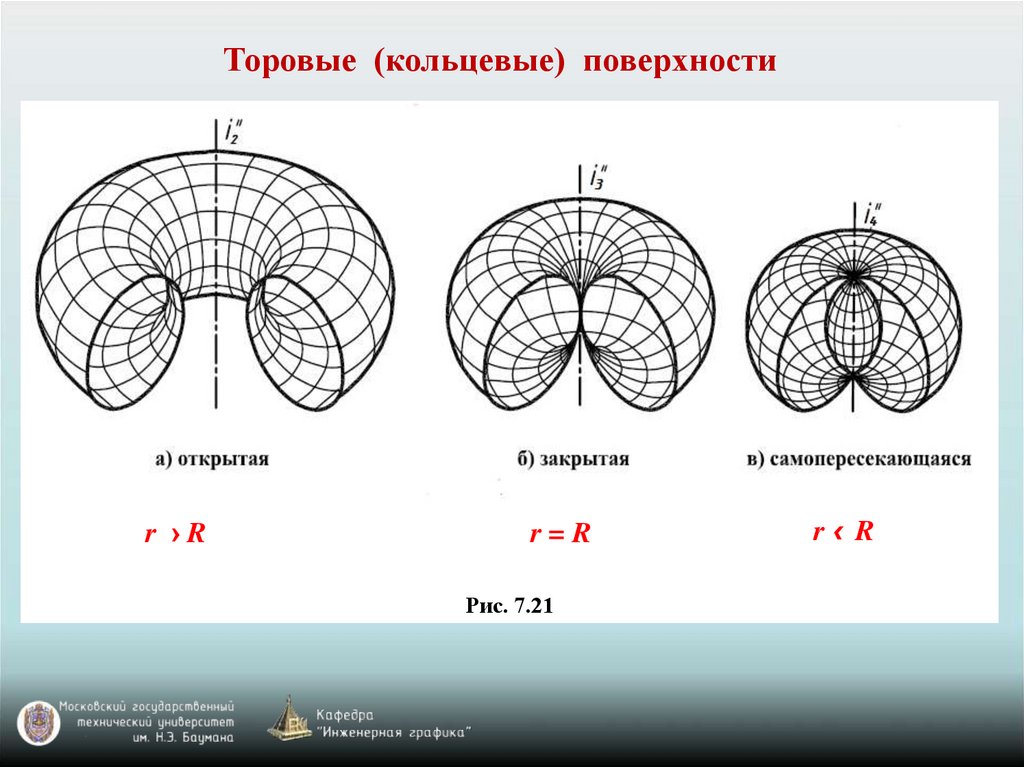
25.
Торовые (кольцевые) поверхностиr ›R
r=R
Рис. 7.21
r‹ R
26.
Построение проекций точек, принадлежащихсферической поверхности yA
m"
p'"
e1"
m1"
e1"'
A"
A'"
e"
p1"
e'"
m'"
p"
m1"'
p1"'
e'
p'
Главный меридиан
Экватор
Профильный меридиан
m'
yA
p1'
e1'
A' m1'
Рис. 7.22
27.
Построение проекций точек, принадлежащихсферической поверхности
yE
m"
E"
E'"
A'"D'"
A"
D"
C"
B"
yD
B'"
e"
yB
e'"
(F")
F'"
p"
C'"
yC
m'"
p'"
B'
yB
yD
(F')
p'
m'
A'
yC
yE
Главный меридиан
Экватор
Профильный меридиан
E'
D'
C'
e'
Рис. 7.22
28.
Построение проекций точек,принадлежащих торовой поверхности
c1"
2"
c2"
B"
1"
A"
x
2'
1'
c2'
c1'
A'
Рис. 7.23
B'
29.
Поверхности вращения с образующей кривой второго порядкаi"
эллипс
A"
g"
x
g'
i'
A'
Рис. 7.24
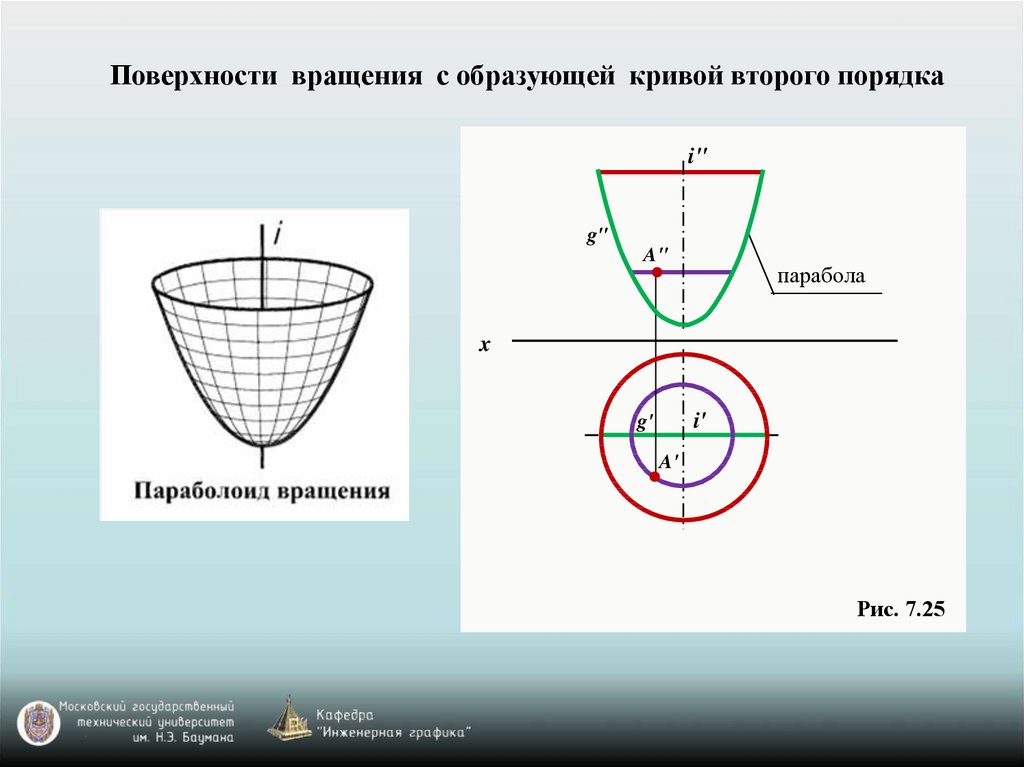
30.
Поверхности вращения с образующей кривой второго порядкаi"
g"
A"
парабола
x
i'
g'
A'
Рис. 7.25
31.
Поверхности вращения с образующей кривой второго порядкаi"
A"
гипербола
g"
x
g'
i'
A'
Рис. 7.26
32.
ВИНТОВЫЕ ПОВЕРХНОСТИВинтовая поверхность формируется при винтовом движении образующей
(прямой или кривой) вокруг оси.
Шаг (P) винтовой поверхности – перемещение образующей вдоль оси за один
оборот
Рис. 7.27
33.
ГЕЛИКОИДЫ1"
11"
i"
Геликоид – винтовая поверхность с
прямолинейной образующей.
P
71"
7"
В зависимости от положения
прямолинейной образующей g по
отношению к оси i , различают
A"
2"
4"≡41"
21"
следующие виды геликоидов:
g" 1 "
1
1"
11'
10'
12'
A'
6'
2'
Рис. 7.27
g ∩i
8'
7'
3'
5'
4'
- прямой
g не ┴ i - косой (наклонный)
i'
g'
1'
g ┴i
9'
g
- закрыты
i - открытый