





 physics
physics mechanics
mechanicsSimilar presentations:
")









Кинематический и динамический анализ механизмов
1.
Семинар по РК-1Кинематический и динамический анализ механизмов
Цель семинара: решение типовых задач
для подготовки к первому рубежному
контролю
Задачи семинара:
1.Методы решения задач по кинематическому анализу механизма
2.Методы решения задач на построение динамической модели
(определение параметров динамической модели):
приведение сил и моментов сил
приведение масс и моментов инерции
3.Задачи на построение цикловых диаграмм моментов сил и работ
4.Задачи на применение метода Мерцалова Н.И. при динамическом
исследовании механизма, на построение цикловых диаграмм угловой
скорости и углового ускорения
Далее…
В.Б. Тарабарин «Семинары по ТММ»- март 2015 МГТУ им. Н.Э. Баумана
2.
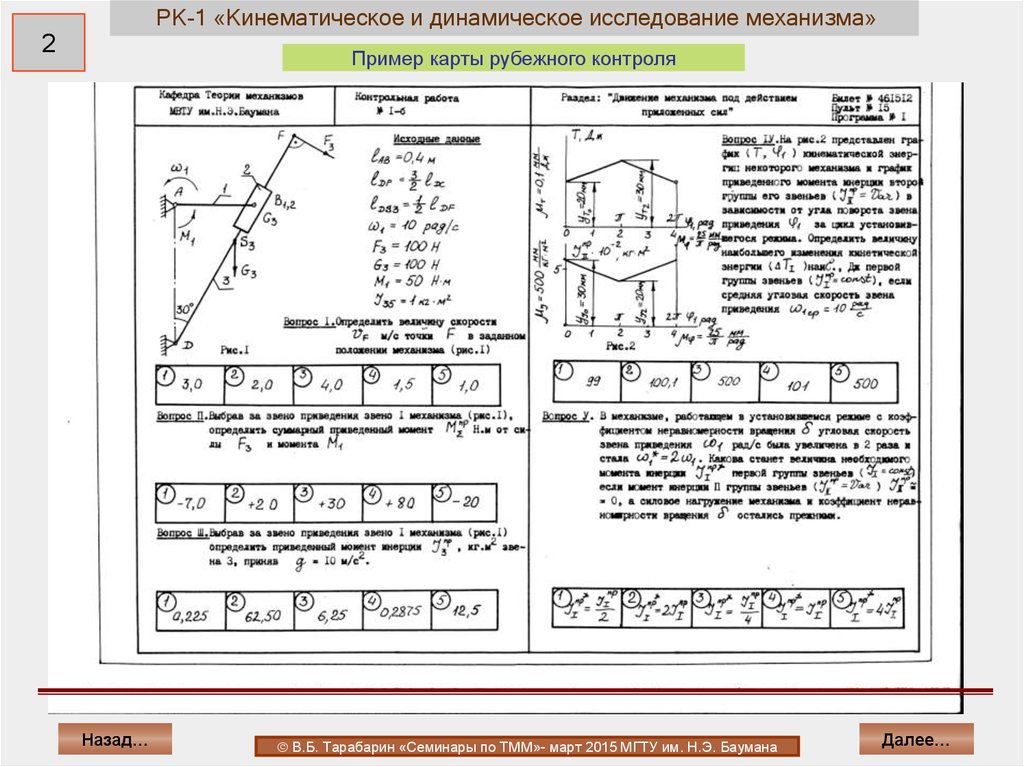
РК-1 «Кинематическое и динамическое исследование механизма»2
Пример карты рубежного контроля
Назад…
В.Б. Тарабарин «Семинары по ТММ»- март 2015 МГТУ им. Н.Э. Баумана
Далее…
3.
РК-1 «Кинематическое и динамическое исследование механизма»3
Первая
задача
относится к разделу кинематического
анализа
плоских
рычажных
механизмов.
Вторая и третья задачи относятся к методам построения одномассной динамической
модели. Вторая посвящена приведению сил и моментов сил, третья – приведению масс и моментов
инерции.
Четвертая и пятая задачи отражают раздел курса по исследованию динамики механизма
энергетическим методом, определению закона движения механизма по методу Мерцалова Н.И.
Здесь необходимо на практике применить теорему об изменении кинетической энергии,
знание характерных особенностей движения при установившемся и неустановившемся
режимах работы машины.
Каждая задача имеет пять ответов, из которых нужно определить правильный или неправильный.
Чаще в ответе необходимо выбрать один неправильный ответ, среди четырех правильных. При ответе
необходимо следить за знаком расчетной величины. Ответ должен обязательно сопровождаться
пояснениями. Ответы без пояснений не зачитываются. Результаты рубежного контроля отражаются на
первой странице в таблице
1
2
3
4
5
2
4
1
4
2
Оценка за рубежный контроль поставляется следующим образом: 0 – отсутствовал или
присутствовал, но не сдал листок с результатами, 1 – принял участие в РК , но не дал ни одного
правильного ответа, 2 – один правильный ответ, 2,5 - два правильных ответа, 3 – три , 4 – четыре и 5 –
пять правильных ответов. Пересдача рубежного контроля возможна только для студентов,
пропустивших по его уважительным причинам при их желании.
На картах не чертить, не рисовать и не отмечать правильных ответов (особенно если вы их не
знаете). Даже если знаете, то все равно не отмечайте.
Назад…
Далее…
В.Б. Тарабарин «Семинары по ТММ»- март 2015 МГТУ им. Н.Э. Баумана
4.
РК-1 «Кинематическое и динамическое исследование механизма»4
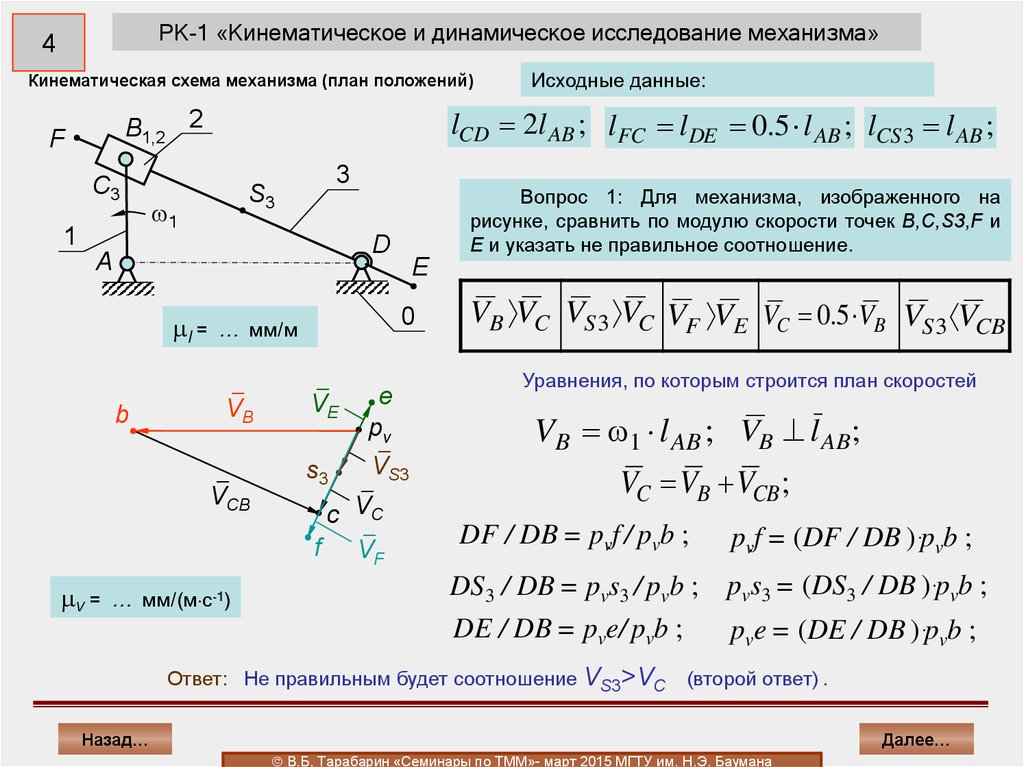
Кинематическая схема механизма (план положений)
lCD 2l AB ; l FC l DE 0.5 l AB ; lCS 3 l AB ;
B1,2 2
F
C3
1
3
S3
1
b
VB
… мм/(м с-1)
E
0
… мм/м
VCB
V =
Вопрос 1: Для механизма, изображенного на
рисунке, сравнить по модулю скорости точек B,C,S3,F и
E и указать не правильное соотношение.
D
A
l =
Исходные данные:
VE
s3
e
pv
VS3
c VC
f VF
VB VC VS 3 VC VF VE VC 0.5 VB VS 3 VCB
Уравнения, по которым строится план скоростей
VB 1 l AB ; VB l AB;
VC VB VCB ;
DF / DB = pvf / pvb ;
pvf = (DF / DB )ּ pvb ;
DS3 / DB = pvs3 / pvb ;
DE / DB = pve/ pvb ;
pvs3 = (DS3 / DB )ּ pvb ;
Ответ: Не правильным будет соотношение VS3>VC
pve = (DE / DB )ּ pvb ;
(второй ответ) .
Назад…
Далее…
В.Б. Тарабарин «Семинары по ТММ»- март 2015 МГТУ им. Н.Э. Баумана
5.
РК-1 «Кинематическое и динамическое исследование механизма»5
Исходные данные:
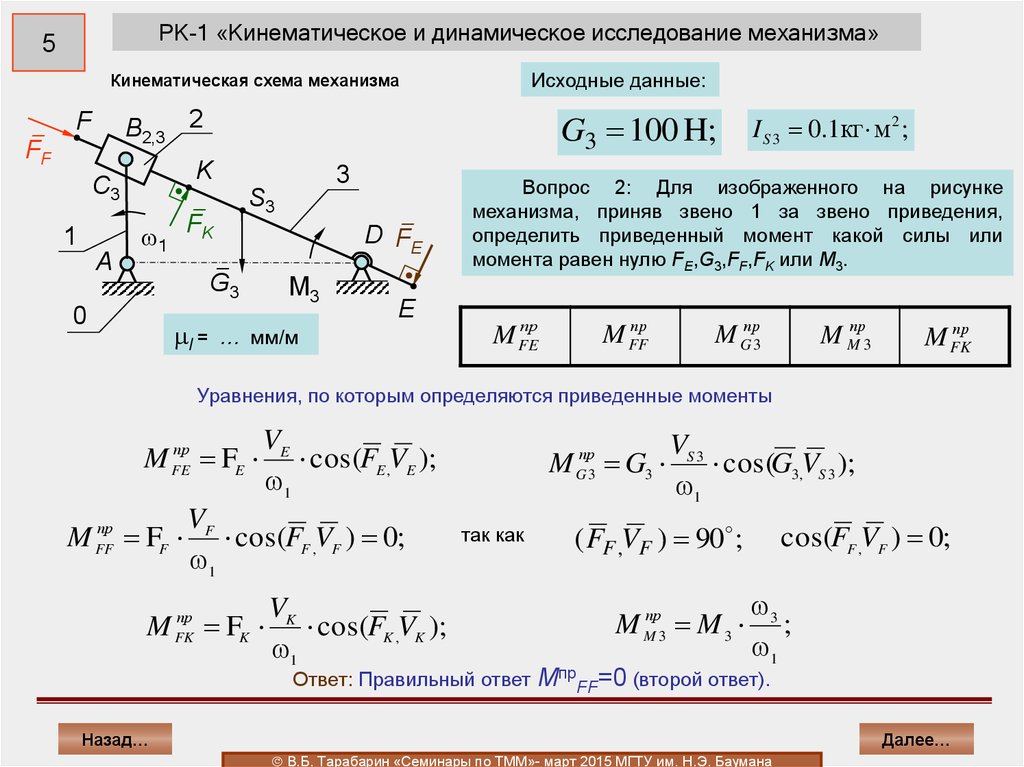
Кинематическая схема механизма
FF
G3 100 H;
B2,3 2
F
K
C3
1
A
1
S3
FK
D FE
G3
0
l =
3
M3
E
… мм/м
I S 3 0.1кг м 2 ;
Вопрос 2: Для изображенного на рисунке
механизма, приняв звено 1 за звено приведения,
определить приведенный момент какой силы или
момента равен нулю FE,G3,FF,FK или M3.
пр
M FE
пр
M FF
M Gпр3
M Mпр3
пр
M FK
Уравнения, по которым определяются приведенные моменты
пр
M FE
FE
M
пр
FF
VE
cos(FE ,VE );
1
VF
FF cos(FF ,VF ) 0;
1
пр
M FK
FK
VK
cos(FK ,VK );
1
M Gпр3 G3
так как
VS 3
cos(G3,VS 3 );
1
cos(FF ,VF ) 0;
( FF ,VF ) 90 ;
M Mпр3 M 3
3
;
1
Ответ: Правильный ответ MпрFF=0 (второй ответ).
Назад…
Далее…
В.Б. Тарабарин «Семинары по ТММ»- март 2015 МГТУ им. Н.Э. Баумана
6.
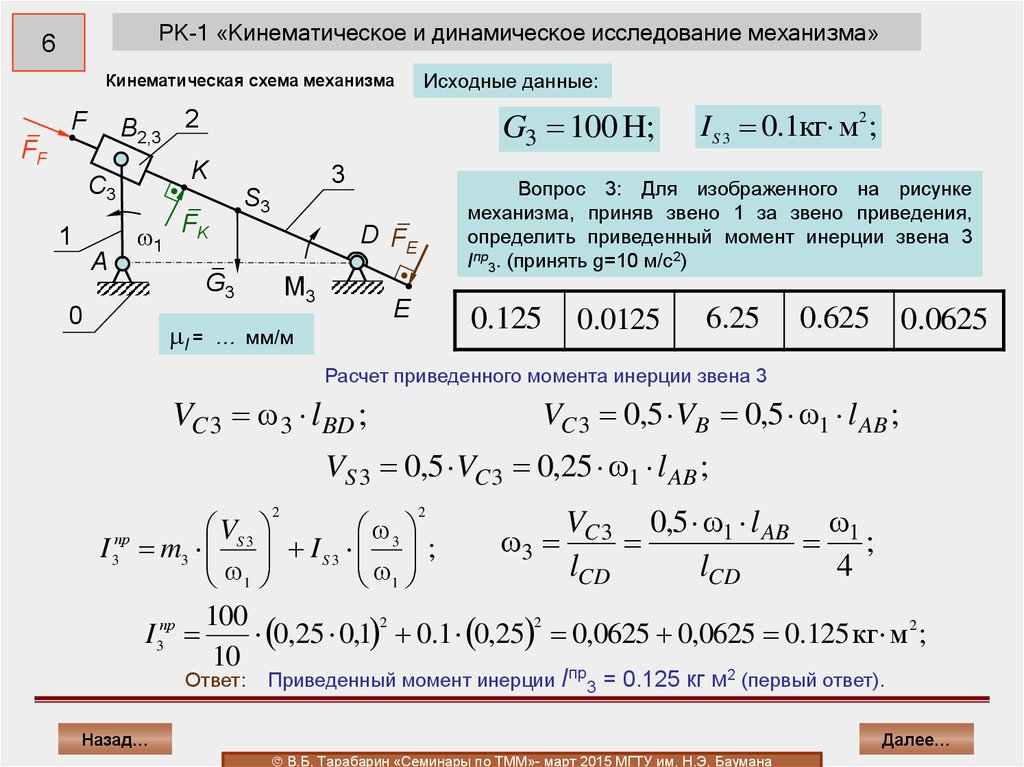
РК-1 «Кинематическое и динамическое исследование механизма»6
Кинематическая схема механизма
FF
Исходные данные:
G3 100 H;
B2,3 2
F
K
C3
1
1
A
3
S3
FK
0
l =
Вопрос 3: Для изображенного на рисунке
механизма, приняв звено 1 за звено приведения,
определить приведенный момент инерции звена 3
Iпр3. (принять g=10 м/с2)
D FE
G3
M3
I S 3 0.1кг м2 ;
E
0.125
… мм/м
0.0125
6.25
0.625 0.0625
Расчет приведенного момента инерции звена 3
VC 3 3 l BD ;
VC 3 0,5 VB 0,5 1 l AB ;
VS 3 0,5 VC 3 0,25 1 l AB ;
VC 3 0,5 1 l AB 1
VS 3
3
;
I m3 I S 3 ;
3
lCD
lCD
4
1
1
100
2
2
I 3пр
0,25 0,1 0.1 0,25 0,0625 0,0625 0.125 кг м 2 ;
10
пр
2
2
2
пр
3
Ответ:
Приведенный момент инерции I 3 = 0.125 кг м (первый ответ).
Назад…
Далее…
В.Б. Тарабарин «Семинары по ТММ»- март 2015 МГТУ им. Н.Э. Баумана
7.
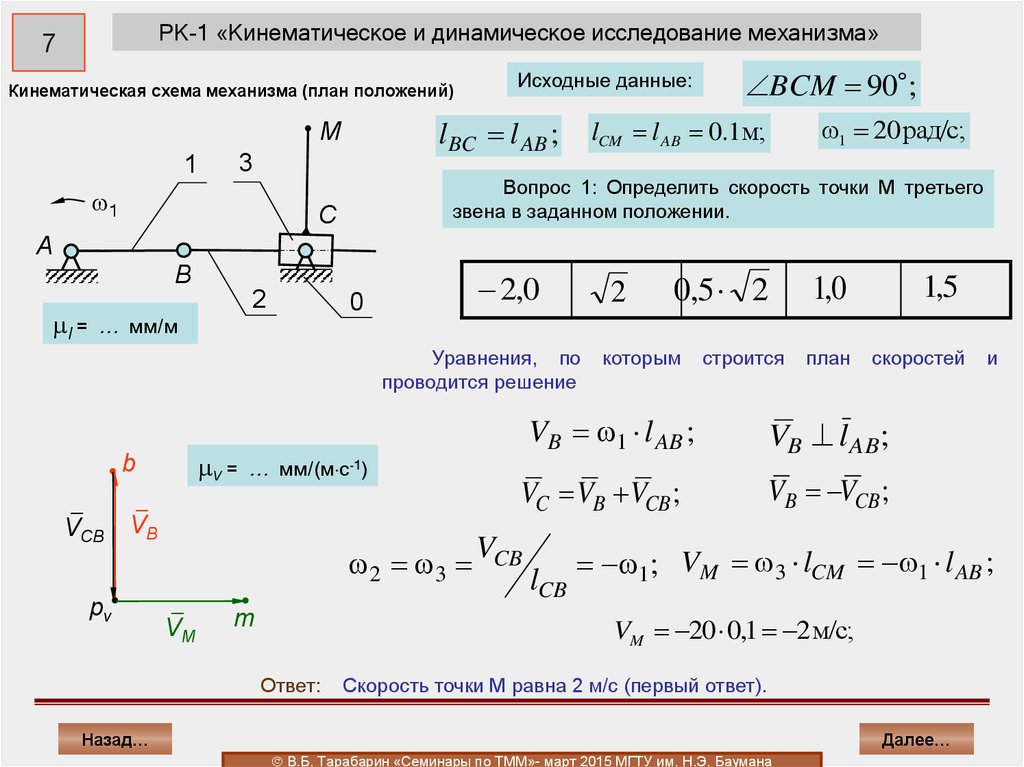
РК-1 «Кинематическое и динамическое исследование механизма»7
Кинематическая схема механизма (план положений)
l BC l AB ;
M
3
1
1
Исходные данные:
BCM 90 ;
1 20 рад/с;
lCM l AB 0.1м;
Вопрос 1: Определить скорость точки М третьего
звена в заданном положении.
C
A
B
l =
2
2,0
0
… мм/м
2
Уравнения, по
проводится решение
V =
b
… мм/(м с-1)
VCB VB
pv
VM
2 3
m
0,5 2
которым
строится
1,5
1,0
план
скоростей
VB 1 l AB ;
VB l AB;
VC VB VCB ;
VB VCB ;
VCB
lCB
1; VM 3 lCM 1 l AB ;
VM 20 0,1 2 м/с;
Ответ:
и
Скорость точки М равна 2 м/с (первый ответ).
Назад…
Далее…
В.Б. Тарабарин «Семинары по ТММ»- март 2015 МГТУ им. Н.Э. Баумана
8.
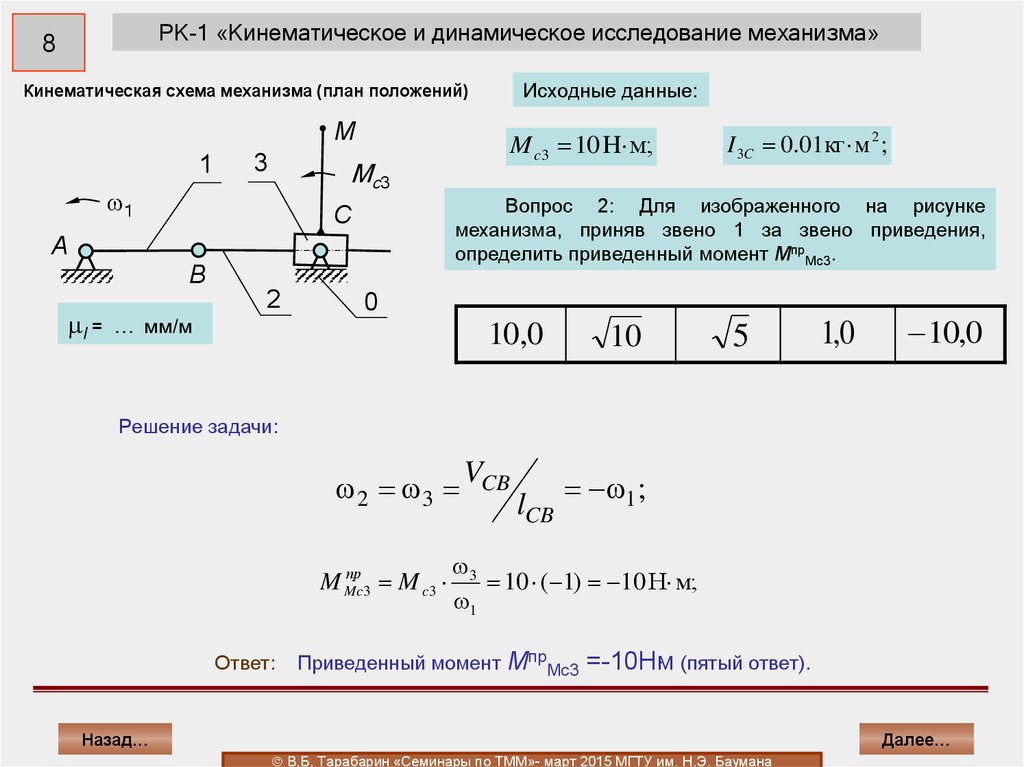
РК-1 «Кинематическое и динамическое исследование механизма»8
Исходные данные:
Кинематическая схема механизма (план положений)
M
1
3
Mс3
1
B
2
… мм/м
I 3C 0.01кг м 2 ;
Вопрос 2: Для изображенного на рисунке
механизма, приняв звено 1 за звено приведения,
определить приведенный момент MпрMc3.
C
A
l =
M c3 10 H м;
0
10,0
10
5
1,0
10,0
Решение задачи:
2 3
пр
M Mc
3 M c3
Ответ:
VCB
lCB
1;
3
10 ( 1) 10 Н м;
1
Приведенный момент MпрMc3
=-10Нּм (пятый ответ).
Назад…
Далее…
В.Б. Тарабарин «Семинары по ТММ»- март 2015 МГТУ им. Н.Э. Баумана
9.
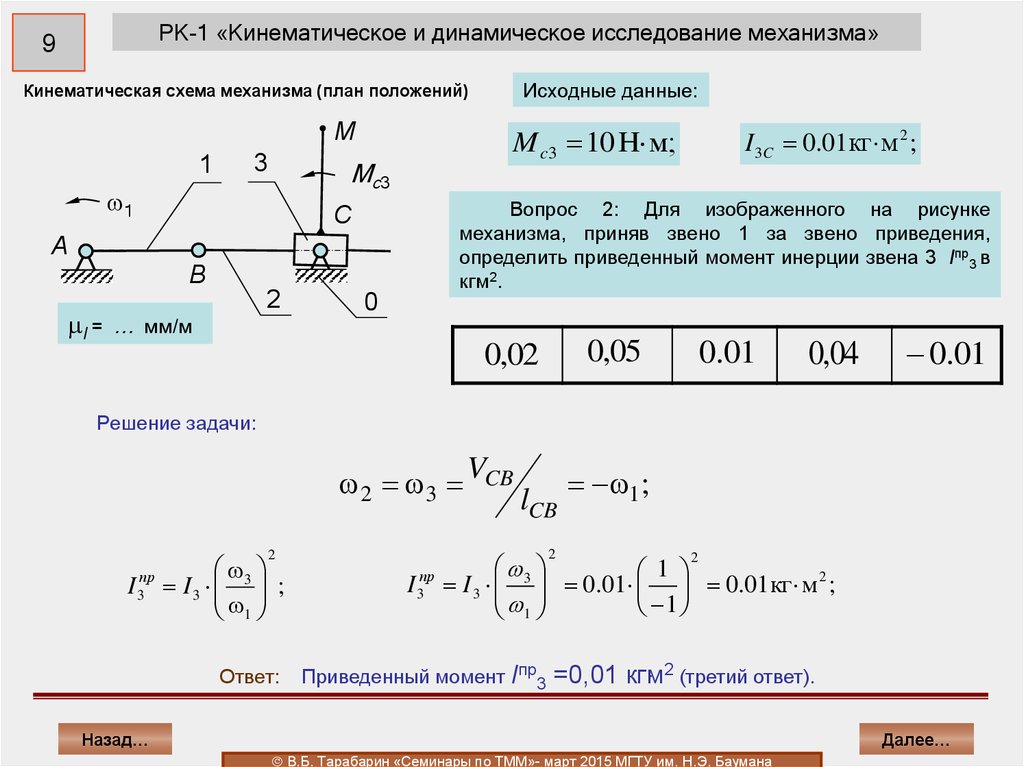
РК-1 «Кинематическое и динамическое исследование механизма»9
Исходные данные:
Кинематическая схема механизма (план положений)
M
1
3
M c3 10 H м;
Mс3
1
Вопрос 2: Для изображенного на рисунке
механизма, приняв звено 1 за звено приведения,
определить приведенный момент инерции звена 3 Iпр3 в
кгּм2.
C
A
B
l =
2
… мм/м
I 3C 0.01кг м 2 ;
0
0,05
0,02
0.01
0,04
0.01
Решение задачи:
2 3
I 3пр
Ответ:
lCB
2
2
I 3 3 ;
1
VCB
I 3пр
1;
1
I 3 3 0.01 0.01кг м 2 ;
1
1
Приведенный момент Iпр3
2
=0,01 кгּм2 (третий ответ).
Назад…
Далее…
В.Б. Тарабарин «Семинары по ТММ»- март 2015 МГТУ им. Н.Э. Баумана
10.
РК-1 «Кинематическое и динамическое исследование механизма»10
Кинематическая схема механизма (план положений)
S3
A
1
1
3
C
B
S2
D
l =
Уравнения, по которым строится план скоростей
b
45º
VEB
VE= VS3= VD = VC
e,s3,d,c
… мм/(м с-1)
VB VS 3 VB VC VC VD VB VD VC VD
… мм/м
VB= VS2
pv
V =
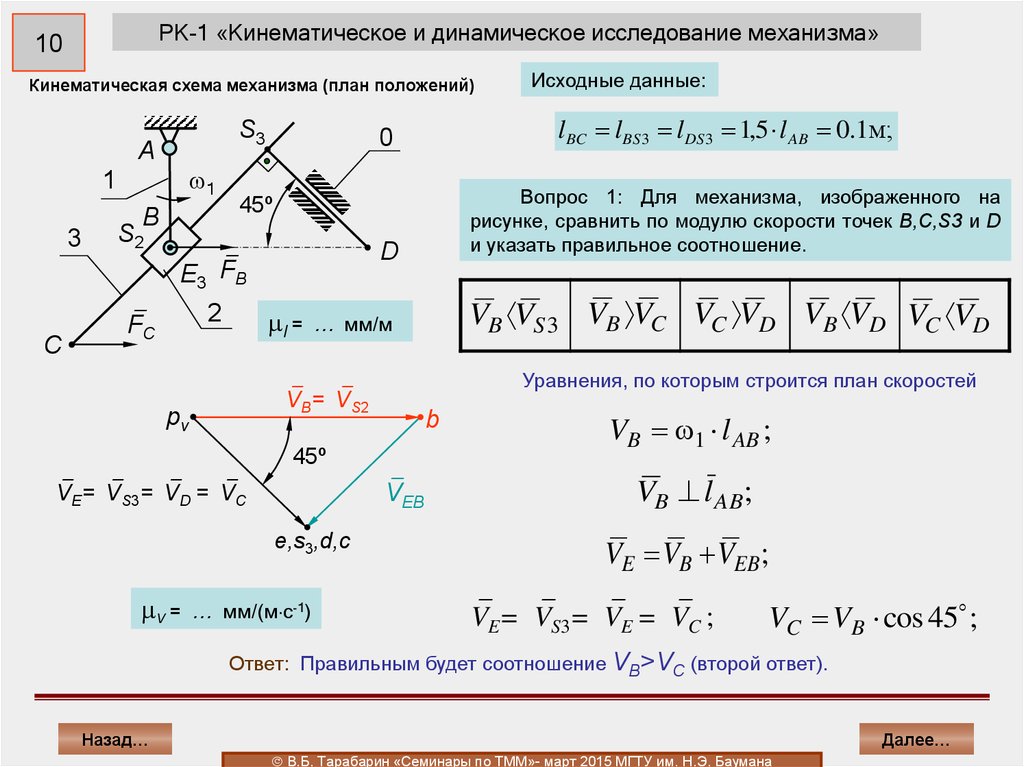
Вопрос 1: Для механизма, изображенного на
рисунке, сравнить по модулю скорости точек B,C,S3 и D
и указать правильное соотношение.
45º
2
FC
lBC lBS 3 lDS 3 1,5 l AB 0.1м;
0
E3 FB
Исходные данные:
VB 1 l AB ;
VB l AB;
VE VB VEB;
VE= VS3= VE = VC ;
VC VB cos 45 ;
Ответ: Правильным будет соотношение VB>VC (второй ответ).
Назад…
Далее…
В.Б. Тарабарин «Семинары по ТММ»- март 2015 МГТУ им. Н.Э. Баумана
11.
РК-1 «Кинематическое и динамическое исследование механизма»11
Исходные данные:
Кинематическая схема механизма (план положений)
S3
A
1
1
B
S2
3
2
D
пр
M FC
l =
пр
M FC
пр
пр
M FC
2M FB
пр
пр
M FC
4 M FB
пр
пр
M FC
M FB
VB
cos(FB ,VB );
1
VB
cos( FB ,VB ) 1;
l AB ;
пр
M FB
FB
b
VEB
VE= VS3= VD = VC
…
пр
пр
M FC
2 M FB
Решение задачи:
45º
мм/(м с-1)
1 пр
M FB
2
… мм/м
VB= VS2
pv
V =
Вопрос 2: Для механизма, изображенного на
рисунке, сравнить по модулю приведенные моменты
MпрFB и MпрFС от сил FB и FC и указать правильное
соотношение.
45º
E3 FB
FC
C
0
FC FB F ;
( FB ,VB ) 0;
e,s3,d,c
M F lAB ;
пр
FB
1
( FC ,VC ) 45 ; cos( FC ,VC ) 0,707; VC VB cos 45 ;
VC
V
пр
l AB cos45 ;
M FC
F 0,5 lAB ;
FC C cos(FC ,VC );
1
1
Ответ:
Приведенный момент MпрFC
=0,5 MпрFB (первый ответ).
Назад…
Далее…
В.Б. Тарабарин «Семинары по ТММ»- март 2015 МГТУ им. Н.Э. Баумана
12.
РК-1 «Кинематическое и динамическое исследование механизма»12
Исходные данные:
Кинематическая схема механизма (план положений)
S3
A
1
1
B
S2
3
2
C
0
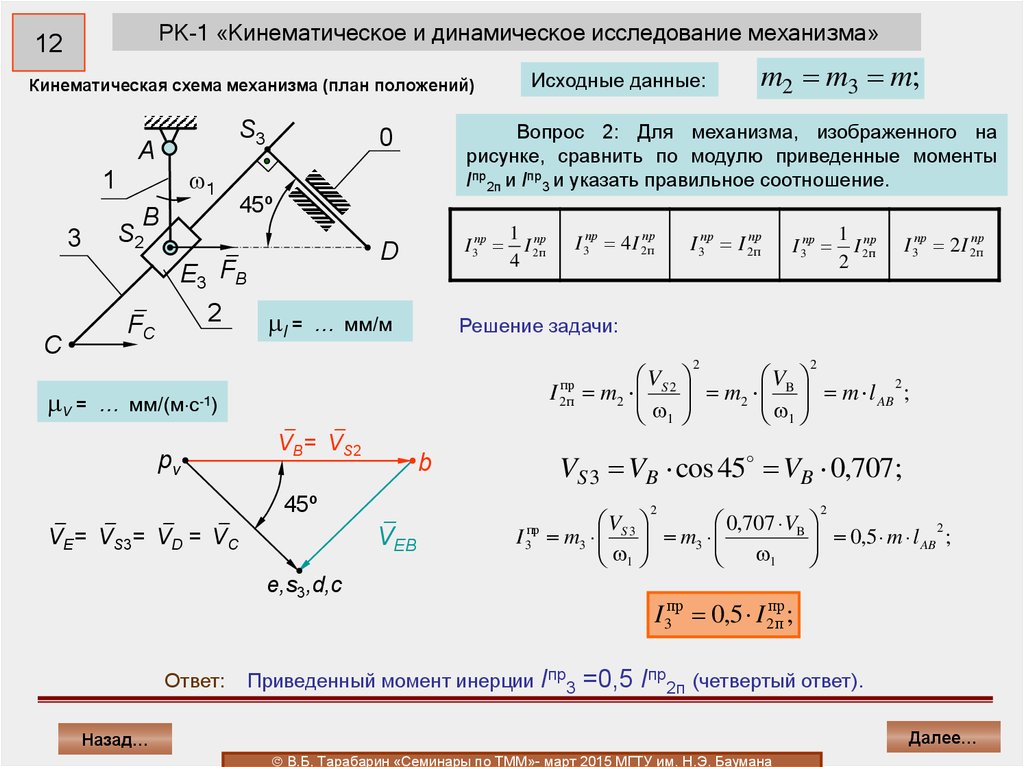
Вопрос 2: Для механизма, изображенного на
рисунке, сравнить по модулю приведенные моменты
Iпр2п и Iпр3 и указать правильное соотношение.
D
I 3пр
45º
E3 FB
FC
m2 m3 m;
l =
… мм/м
1 пр
I 2п
4
I 3пр 4 I 2прп
I 3пр I 2прп
I 3пр
…
I 2прп
мм/(м с-1)
pv
VB= VS2
2
VEB
I
пр
3
2
V
0,707 VB
0,5 m l AB 2 ;
m3 S 3 m3
1
1
e,s3,d,c
Ответ:
2
V
V
2
m2 S 2 m2 B m l AB ;
1
1
VS 3 VB cos 45 VB 0,707;
b
45º
VE= VS3= VD = VC
I 3пр 2 I 2прп
Решение задачи:
2
V =
1 пр
I 2п
2
Приведенный момент инерции Iпр3
I 3пр 0,5 I 2прп ;
=0,5 Iпр2п (четвертый ответ).
Далее…
Назад…
В.Б. Тарабарин «Семинары по ТММ»- март 2015 МГТУ им. Н.Э. Баумана
13.
A = 2 мм/ДжРК-1 «Кинематическое и динамическое исследование механизма»
A , Дж
yA=30 мм
1 , рад
0
2
φ
=12.7мм/рад
I = 100 мм/кгм2
yA=30 мм
I IIпр , кг м 2
yI=30 мм
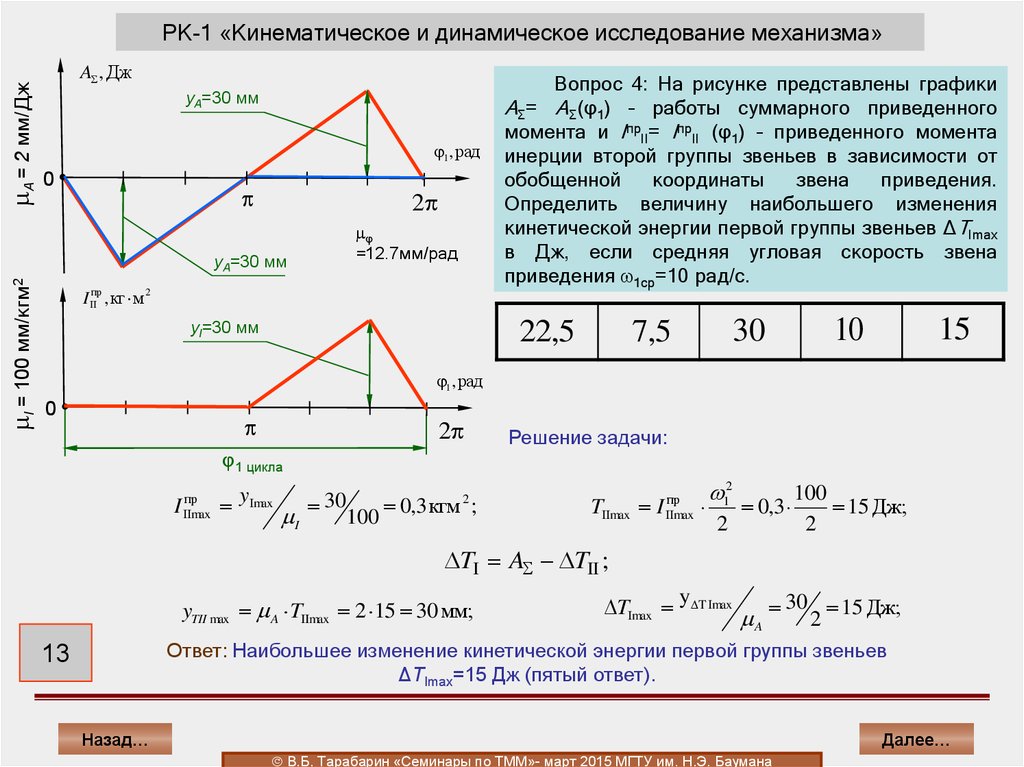
Вопрос 4: На рисунке представлены графики
AΣ= AΣ(φ1) – работы суммарного приведенного
момента и IпрII= IпрII (φ1) – приведенного момента
инерции второй группы звеньев в зависимости от
обобщенной
координаты
звена
приведения.
Определить величину наибольшего изменения
кинетической энергии первой группы звеньев ΔTImax
в Дж, если средняя угловая скорость звена
приведения 1ср=10 рад/с.
22,5
15
10
30
7,5
1 , рад
0
2
φ1 цикла
I
пр
IImax
yImax
I
30
0,3 кгм ;
2
100
Решение задачи:
TIImax I
пр
IImax
12
2
0,3
100
15 Дж;
2
TI A TII ;
yTII max A TIImax 2 15 30 мм;
TImax
y T Imax
A
30 15 Дж;
2
Ответ: Наибольшее изменение кинетической энергии первой группы звеньев
ΔTImax=15 Дж (пятый ответ).
13
Назад…
Далее…
В.Б. Тарабарин «Семинары по ТММ»- март 2015 МГТУ им. Н.Э. Баумана
14.
РК-1 «Кинематическое и динамическое исследование механизма»M = 2 мм/(Нм)
14
M пр , Н м
yMд=20 мм
1 , рад
0
2
4
6
yMc=40 мм
12,5
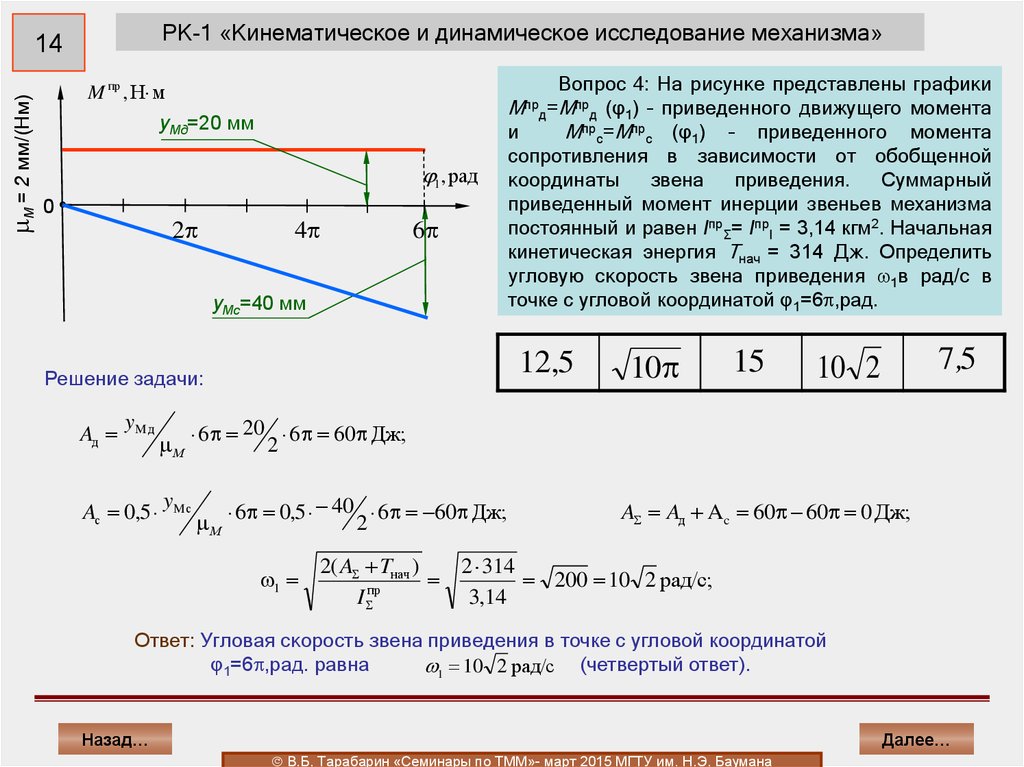
Решение задачи:
Aд
yM д
Aс 0,5
М
Вопрос 4: На рисунке представлены графики
приведенного движущего момента
(φ1) – приведенного момента
сопротивления в зависимости от обобщенной
координаты
звена
приведения.
Суммарный
приведенный момент инерции звеньев механизма
постоянный и равен IпрΣ= IпрI = 3,14 кгм2. Начальная
кинетическая энергия Tнач = 314 Дж. Определить
угловую скорость звена приведения 1в рад/с в
точке с угловой координатой φ1=6 ,рад.
Mпрд=Mпрд (φ1) –
и
Mпрс=Mпрс
10
15
7,5
10 2
6 20 6 60 Дж;
2
yM с
М
6 0,5 40 6 60 Дж;
2
1
A Aд Ac 60 60 0 Дж;
2( A Tнач )
2 314
200 10 2 рад/с;
I пр
3,14
Ответ: Угловая скорость звена приведения в точке с угловой координатой
φ1=6 ,рад. равна
1 10 2 рад/с (четвертый ответ).
Назад…
Далее…
В.Б. Тарабарин «Семинары по ТММ»- март 2015 МГТУ им. Н.Э. Баумана
15.
M = 10 мм/(Нм)РК-1 «Кинематическое и динамическое исследование механизма»
пр
M д , Н м
Mдmax
0
15мм
1 , рад
15мм 15мм
15мм 15мм
M = 10 мм/(Нм)
пр
Mсmax
M c , Н м
0
1
2
3
Вопрос 4: На рисунке представлены графики
приведенного движущего момента
(φ1) – приведенного момента
сопротивления в зависимости от обобщенной
координаты звена приведения. Определить при
каком соотношении моментов Mпрсmax/Mпрдmax
машина будет работать в установившемся режиме.
Mпрд=Mпрд (φ1) –
и
Mпрс=Mпрс
4
5
2
1 , рад
6
Ac
yM c max
φ1 цикла
A Aд A c 0 Дж;
Aд Ac ;
yM д max
0,75
0,25
Решение задачи:
φ =10мм/рад
Aд
0,5
1,33
45
45
M cmax 4,5M cmax Дж;
М
10
2 15 45
M дmax
М 2
6M дmax 4,5M cmax ;
15 45
6M дmax Дж;
10 10
M cmax
6
1,33;
M дmax 4,5
Ответ: Режим будет установившимся при соотношении моментов
Mпрсmax/Mпрдmax=1,33 (второй ответ).
15
Назад…
Далее…
В.Б. Тарабарин «Семинары по ТММ»- март 2015 МГТУ им. Н.Э. Баумана
16.
= 100 мм/(радс -1)16
РК-1 «Кинематическое и динамическое исследование механизма»
1 , рад/с
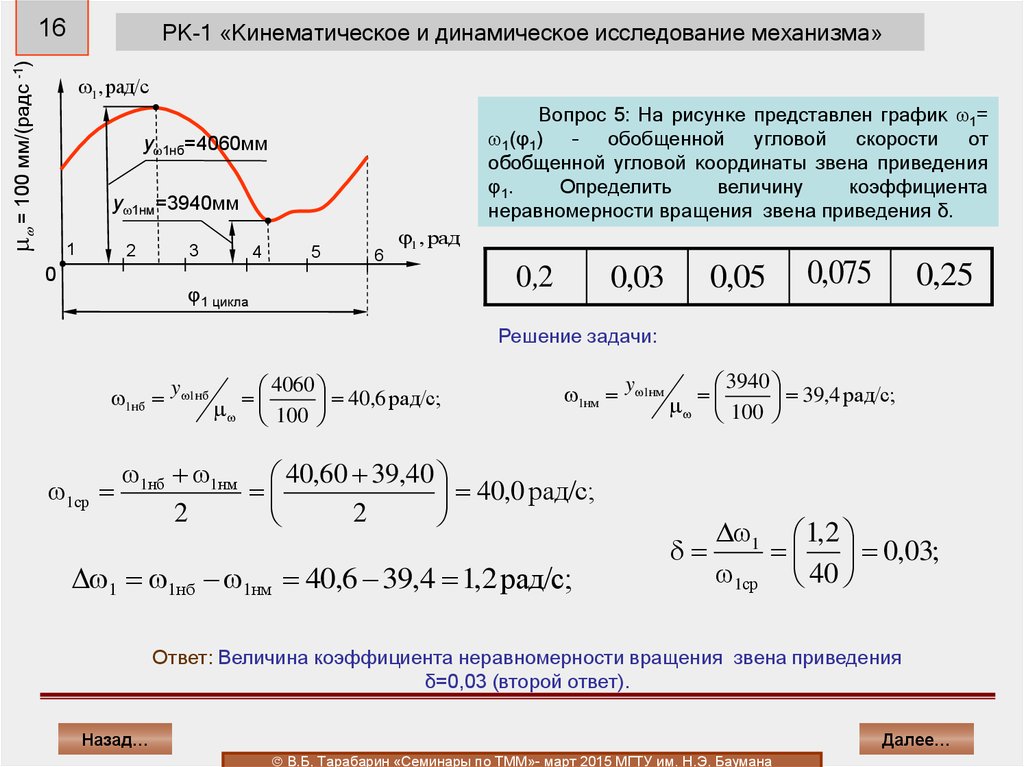
Вопрос 5: На рисунке представлен график 1=
1(φ1) – обобщенной угловой скорости от
обобщенной угловой координаты звена приведения
φ1.
Определить
величину
коэффициента
неравномерности вращения звена приведения δ.
y 1нб=4060мм
y 1нм=3940мм
1
3
2
0
4
5
6
1 , рад
0,2
φ1 цикла
0,05
0,03
0,075
0,25
Решение задачи:
1нб
1ср
y 1нб
4060
40,6 рад/с;
100
1нм
1нб 1нм 40,60 39,40
40,0 рад/с;
2
2
1 1нб 1нм 40,6 39,4 1,2 рад/с;
y 1нм
3940
39,4 рад/с;
100
1 1,2
0,03;
1ср 40
Ответ: Величина коэффициента неравномерности вращения звена приведения
δ=0,03 (второй ответ).
Назад…
Далее…
В.Б. Тарабарин «Семинары по ТММ»- март 2015 МГТУ им. Н.Э. Баумана
17.
РК-1 «Кинематическое и динамическое исследование механизма»17
= 10 мм/(радс -1)
1 , рад/с
ψ2=30º
ψ3=135º
y 12= y 13 =40мм
ψ4=120º
ψ1=45º
ψ5=0º
y 11=30мм
1
3
2
0
4
5
13
2
2
15
y 11 tg 11
y 13 tg 3
2
1
2
5
4
3
Решение задачи:
1i 1i
11
1 , рад
6
y 14=25мм
φ1 цикла
y 15=20мм
Вопрос 5: На рисунке представлен график 1=
1(φ1) – обобщенной угловой скорости от
обобщенной угловой координаты звена приведения
φ1. Определить в каком из указанных положений
механизма
угловое
ускорение
1
будет
максимальным.
d 1i y 1i y 1i
y
2 y 1i 1i 2 y 1i tg 1i ;
d 1
x 1i
x 1
2
2
30 1
2
40 ( 1)
y 15 tg 5
2
30;
2
20 0 0;
40;
12
14
2
2
y 12 tg 2
y 14 tg 4
2
2
40 0,577
2
25 ( 1,732 )
2
23;
43.3;
Ответ: Угловое ускорение 1 будет максимальным в
положении 1 (первый ответ).
Назад…
Далее…
В.Б. Тарабарин «Семинары по ТММ»- март 2015 МГТУ им. Н.Э. Баумана
18.
РК-1 «Кинематическое и динамическое исследование механизма»M = 2 мм/(Нм)
18
M пр , Н м
yMд=20 мм
1 , рад
0
2
yMд=20 мм
A =…,мм/Дж
A , Дж
1 , рад/с
=…,мм/(рад/с)
0
1 , рад
2
yΔA = yΔ
Вопрос 5: На рисунке представлен график
MпрΣ=MпрΣ (φ1) – суммарного приведенного момента
в зависимости от обобщенной координаты звена
приведения за период цикла φ1ц = 2
установившегося движения при средней угловой
скорости 1ср=10 рад/с. На валу звена приведения
установлен маховик с моментом инерции IIпр = 3,14
кгм2.
Определить
величину
коэффициента
неравномерности вращения звена приведения δ
при условии, что моментом инерции второй группы
звеньев механизма можно пренебречь.
0,04
Решение задачи:
yM прд
0,5
y y A y T I ;
1
y
y
A 0,5 рад/с;
2 y A
A
0,025
0,01
A TIн б ;
TII 0 Дж;
20
0,5 5 Дж;
M
2
y
I Iпр 1ср A 10 A 2 y A мм/(радс 1 );
5
A
0,05
0,02
y A
y
A мм/Дж;
A 5
1 0,5
0,05;
1ср 10
Ответ: Величина коэффициента неравномерности вращения звена приведения
δ=0,05 (третий ответ).
Назад…
Далее…
В.Б. Тарабарин «Семинары по ТММ»- март 2015 МГТУ им. Н.Э. Баумана
19.
19Методические указания для подготовки к первому рубежному контролю
1. Сайт «Учебно-методический комплекс по ТММ». Раздел «Тесты». Адрес: http://tmmumk.bmstu.ru
2. Теория механизмов и механика машин. Учеб. Для вузов./ К.В. Фролов, С.А. Попов, А.К.
Мусатов и др.; под ред. К.В.Фролова. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2002. – 664с.; ил.
3. Попов С.А., Тимофеев Г.А. Курсовое проектирование по теории механизмов и
механике машин : Учеб. Пособие для втузов, Под ред. К.В.Фролова. – 3-е изд.,стер. –М.:
Высшая школа, 1999. – 351 с., ил.
Назад…
Далее…
В.Б. Тарабарин «Семинары по ТММ»- март 2015 МГТУ им. Н.Э. Баумана