








 mechanics
mechanics drafting
draftingSimilar presentations:





")




Кинематический анализ плоского рычажного механизма V- образного ДВС. (Семинар 2)
1.
Семинар 2Кинематический анализ плоского рычажного механизма
V- образного ДВС методом планов
Цель семинара: изучение
метода планов положений,
скоростей и ускорений на
конкретном примере рычажного
механизма ДВС
1.
2.
3.
4.
Задачи семинара:
Построение
кинематической
схемы
механизма (плана положений)
Построение плана скоростей для всех точек,
обозначенных на механизме
Построение плана ускорений для всех точек,
обозначенных на механизме
Знакомство
с
примерами
оформления
данного раздела первой части КР
Далее…
В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ ИДО
2.
Исходные данные к первому ДЗ по МеханикеH
Назад…
λ
β
H
λ
В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ ИДО
β
Далее…
3.
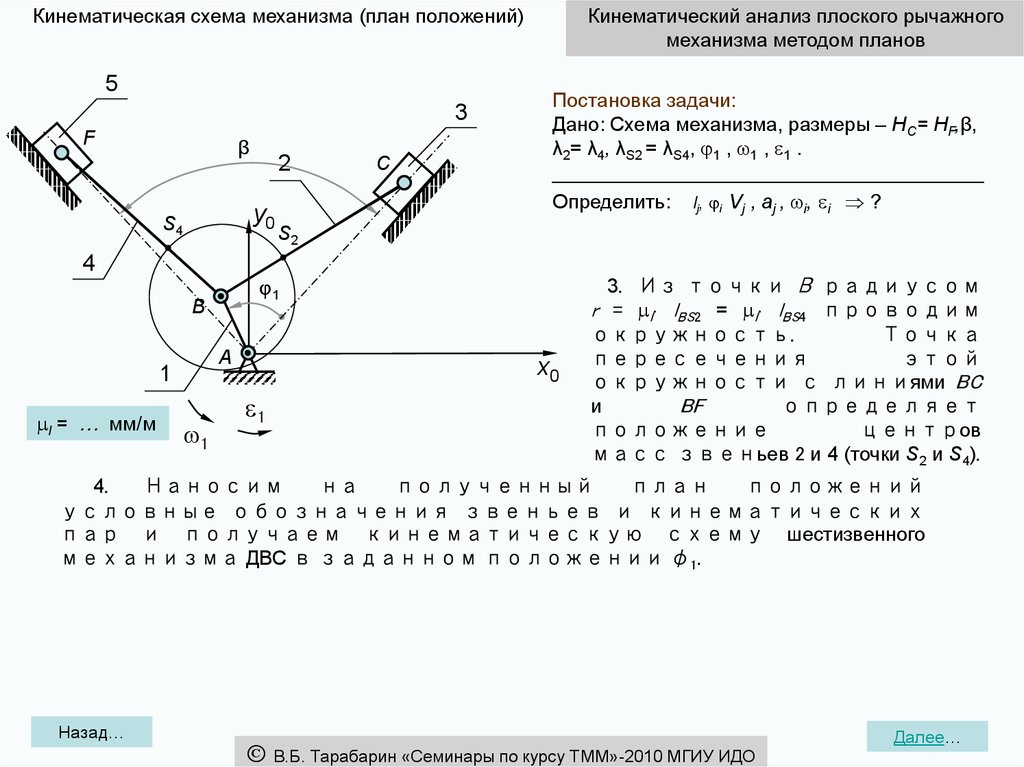
Кинематический анализ плоского рычажногомеханизма методом планов
Постановка задачи:
Дано: Схема механизма, размеры – HC= HF, β,
λ2= λ4, λS2 = λS4, K· 1 , 1 , 1, K.
_______________________________________
Определить: lj, j Vj , aj , i, i ?
Перед началом построения плана механизма необходимо по имеющимся исходным
данным определить недостающие размеры звеньев.
l AB
Длина кривошипа:
Длина шатунов:
K HC
,м
2
lBC l AB 2 , м
lBF l AB 4 , м
lBS 2 lBC S 2 , м
Положение центров масс на шатунах:
lBS 4 lBF S 4 , м
Назад…
В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ ИДО
Далее…
4.
Кинематическая схема механизма (план положений)β
F
β/2
β/2
y0
B
φ1
C
Кинематический анализ плоского рычажного
механизма методом планов
Постановка задачи:
Дано: Схема механизма, размеры – HC= HF, β,
λ2= λ4, λS2 = λS4, 1 , 1 , 1 .
_______________________________________
Определить: lj, i Vj , aj , i, i ?
Построим план механизма и его
кинематическую
схему
в
заданном
положении. Зададимся масштабом l, мм/м.
1.
Выбираем
x0 произвольную точку, в
l = … мм/м
которой размещаем центр
пары А. Принимаем эту
точку за начало правой
системы
координат
x0Ay0.
Проводим оси первого и второго цилиндров
ДВС, откладывая углы 0.5β по и против
часовой стрелки от оси y0.
Угловую
координату
кривошипа
φ1
Из точки А проводим окружность
радиусом
r
=
l
.
Точка
AB
отсчитываем от оси первого lцилиндра.
пересечения этой окружности с прямой определяет
положение центра шарнира B. Соединяем точки А и В и
2. Из точки
В радиусом звена
r = l lBС =1. l lBF проводим окружность.
получаем
изображение
Точки пересечения этой окружности с осями цилиндров
определяют положение центров шарниров С и F. Соединяем
точку В с точками C и F и получаем изображение звеньев 2 и 4,
Назад…
Далее…
координаты
SC и SF , угловые координаты φ2 и φ4.
A
В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ ИДО
5.
Кинематическая схема механизма (план положений)5
3
F
β
2
y0
S4
C
Кинематический анализ плоского рычажного
механизма методом планов
Постановка задачи:
Дано: Схема механизма, размеры – HC= HF,β,
λ2= λ4, λS2 = λS4, 1 , 1 , 1 .
_______________________________________
Определить: lj, i Vj , aj , i, i ?
S2
4
φ1
B
A
1
l = … мм/м
1
x0
1
3. Из точки В радиусом
r = l lBS2 = l lBS4 проводим
окружность.
Точка
пересечения
этой
окружности с линиями BC
и
BF
определяет
положение
центров
масс звеньев 2 и 4 (точки S2 и S4).
4.
Наносим
на
полученный
план
положений
условные обозначения звеньев и кинематических
пар и получаем кинематическую схему шестизвенного
механизма ДВС в заданном положении φ1.
Назад…
В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ ИДО
Далее…
6.
Кинематическая схема механизма (план положений)3
5
Постановка задачи:
Дано: Схема механизма, размеры – HC= HF,β,
λ2= λ4, λS2 = λS4, 1 , 1 , 1 .
_______________________________________
Определить: lj, i Vj , aj , i, i ?
F
2
S4
φ1
B
1
C
S2
4
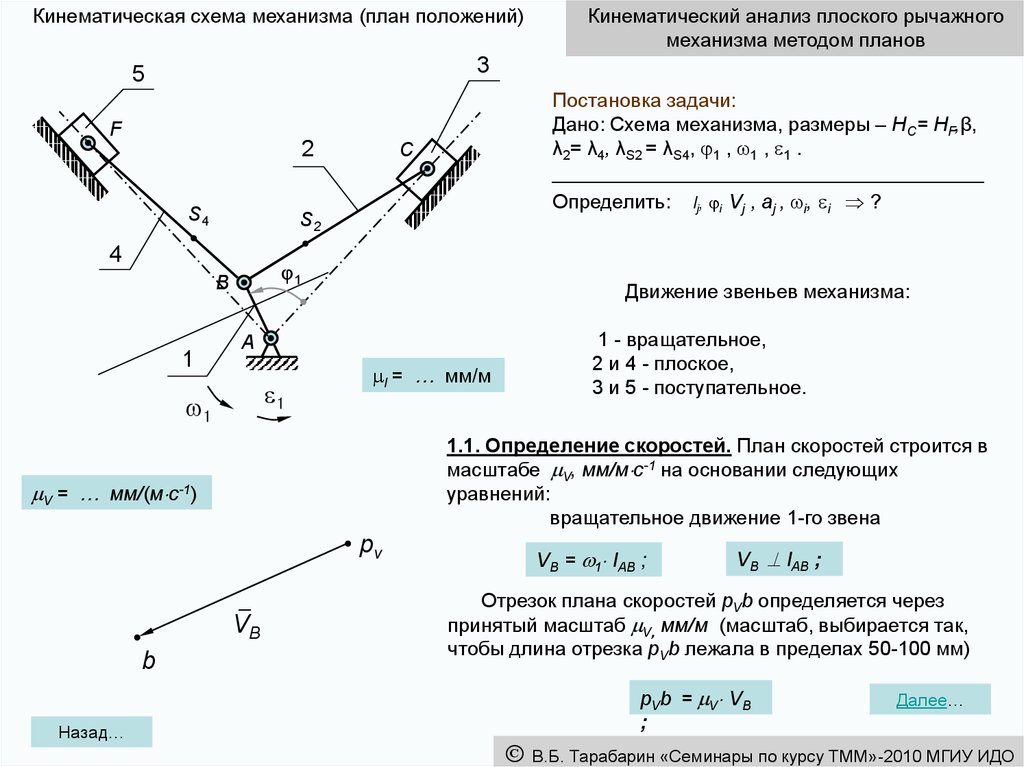
Движение звеньев механизма:
A
1
1
l = … мм/м
pv
VB
Назад…
1 - вращательное,
2 и 4 - плоское,
3 и 5 - поступательное.
1.1. Определение скоростей. План скоростей строится в
масштабе V, мм/м с-1 на основании следующих
уравнений:
вращательное движение 1-го звена
V = … мм/(м с-1)
b
Кинематический анализ плоского рычажного
механизма методом планов
VB = 1 lAB ;
VB lAB ;
Отрезок плана скоростей pVb определяется через
принятый масштаб V, мм/м (маcштаб, выбирается так,
чтобы длина отрезка pVb лежала в пределах 50-100 мм)
pVb = V VB
;
Далее…
В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ ИДО
7.
Кинематический анализ плоского рычажногомеханизма методом планов
5
3
F
2
S4
C
S2
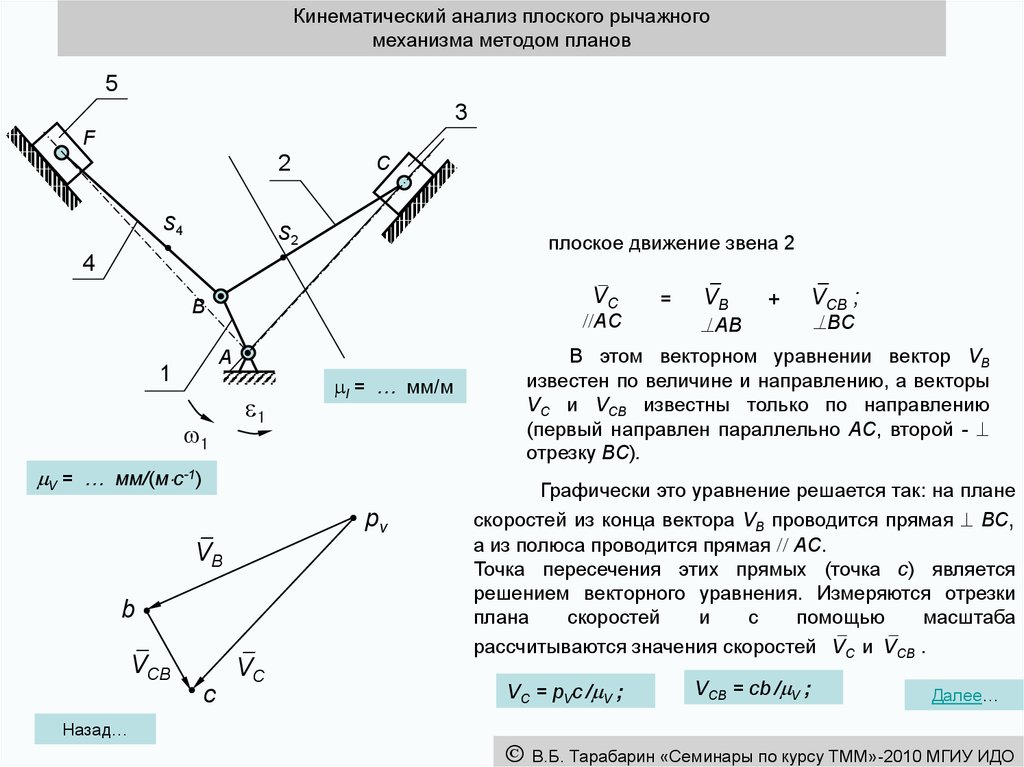
плоское движение звена 2
4
VC
B
AC
1
1
l = … мм/м
V = … мм/(м с-1)
pv
VB
b
VCB
c
Назад…
VB
+ VCB ;
BC
AB
В этом векторном уравнении вектор VB
A
1
=
VC
известен по величине и направлению, а векторы
VС и VСB известны только по направлению
(первый направлен параллельно AC, второй -
отрезку ВС).
Графически это уравнение решается так: на плане
скоростей из конца вектора VB проводится прямая ВС,
а из полюса проводится прямая AС.
Точка пересечения этих прямых (точка с) является
решением векторного уравнения. Измеряются отрезки
плана
скоростей
и
с
помощью
масштаба
рассчитываются значения скоростей VC и VCB .
VС = pVс / V ;
VСB = сb / V ;
Далее…
В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ ИДО
8.
Кинематический анализ плоского рычажногомеханизма методом планов
5
3
F
2
S4
C
S2
плоское движение звена 4
4
B
A
1
1
V = …
l = … мм/м
1
VFB
мм/(м с-1)
VCB
VB
VC
c
Назад…
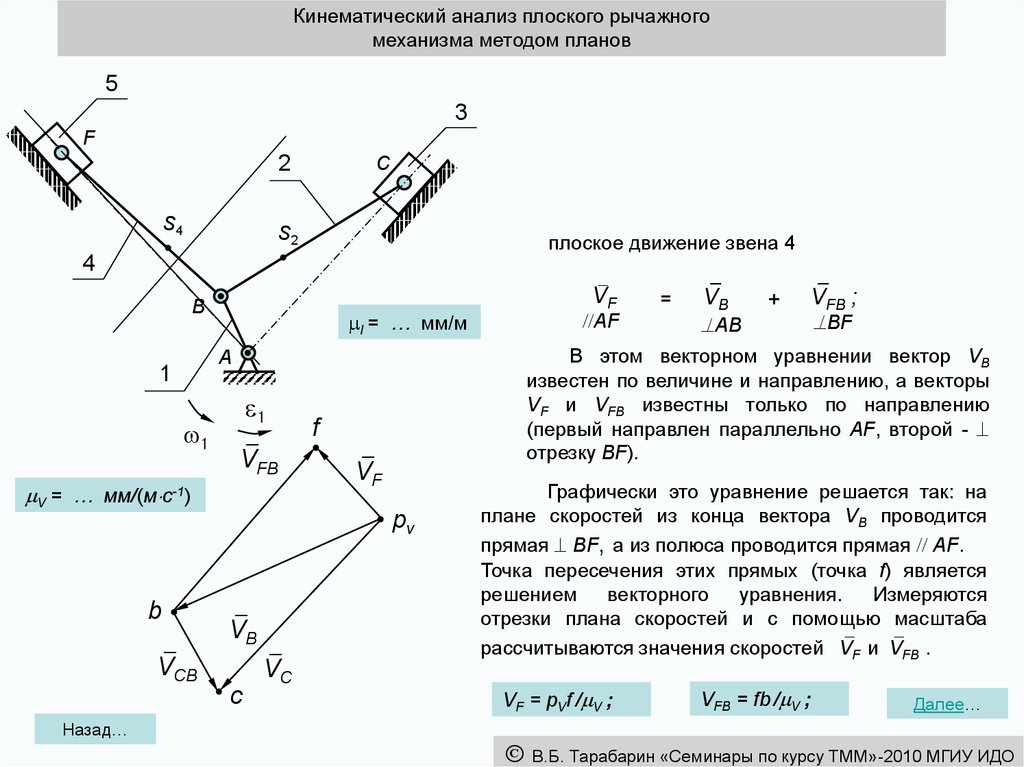
AF
=
VB
+ VFB ;
BF
AB
В этом векторном уравнении вектор VB
известен по величине и направлению, а векторы
VF и VFB известны только по направлению
(первый направлен параллельно AF, второй -
отрезку ВF).
f
VF
pv
b
VF
Графически это уравнение решается так: на
плане скоростей из конца вектора VB проводится
прямая ВF, а из полюса проводится прямая AF.
Точка пересечения этих прямых (точка f) является
решением
векторного
уравнения.
Измеряются
отрезки плана скоростей и с помощью масштаба
рассчитываются значения скоростей VF и VFB .
VF = pVf / V ;
VFB = fb / V ;
Далее…
В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ ИДО
9.
Кинематический анализ плоского рычажногомеханизма методом планов
5
3
2
F
2
S4
C
S2
4
B
l = … мм/м
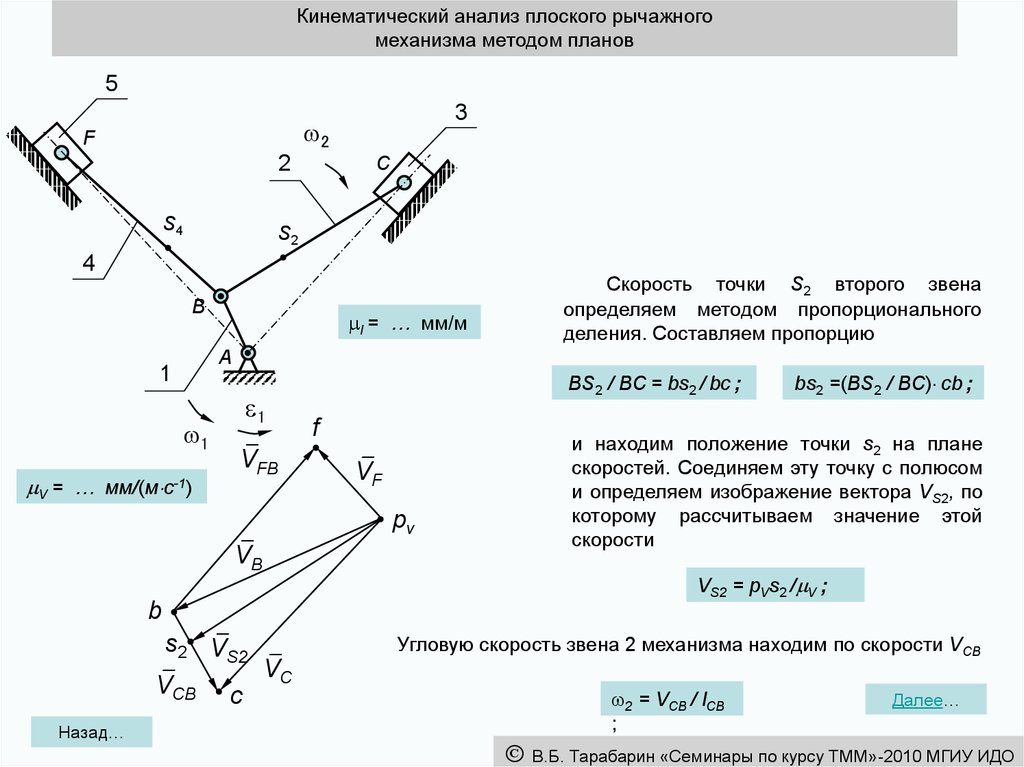
Скорость точки S2 второго звена
определяем методом пропорционального
деления. Составляем пропорцию
A
1
1
V = … мм/(м с-1)
1
VFB
VB
BS2 / BC = bs2 / bc ;
f
VF
pv
bs2 =(BS2 / BC) сb ;
и находим положение точки s2 на плане
скоростей. Соединяем эту точку с полюсом
и определяем изображение вектора VS2, по
которому рассчитываем значение этой
скорости
VS2 = pVs2 / V ;
b
s2 VS2
V
VCB c C
Назад…
Угловую скорость звена 2 механизма находим по скорости VCB
2 = VCB / lCB
;
Далее…
В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ ИДО
10.
Кинематический анализ плоского рычажногомеханизма методом планов
5
F
3
2
4
2
S4
C
S2
4
B
A
1
1
V = … мм/(м с-1)
VB
l = … мм/м
Скорость точки S4 четвертого звена
определяем методом пропорционального
деления. Составляем пропорцию
BS4 / BF = bs4 / bf ;
1
f
VFB
VS4
s4
VF
pv
bs4 =(BS4 / BF) bf ;
и находим положение точки s4 на плане
скоростей. Соединяем эту точку с полюсом
и определяем изображение вектора VS4, по
которому рассчитываем значение этой
скорости
VS4 = pVs4 / V ;
b
s2 VS2
VCB
Назад…
c
VC
Угловую скорость звена 4 механизма находим по скорости VFB
4 = VFB / lFB ;
Далее…
В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ ИДО
11.
Кинематический анализ плоского рычажного механизма методом планов5
F
3
2
4
2
S4
C
1.2. Определение ускорений. Ускорение точки В
звена 1 определяем по уравнению вращательного
движения
aB = anB + atB .
AB AB
S2
4
B
l = … мм/м
A
1
1
anB = 12·lAB ,
1
тангенциальная составляющая направлена
звену 1 и рассчитывается по формуле
atB = ε1·lAB .
pa
aB
В этом векторном уравнении:
нормальная составляющая направлена звену 1,
а величина ее рассчитывается по формуле
Рассчитываются составляющие ускорения,
выбирается масштаб плана ускорений a (отрезок
изображающий
нормальную
составляющую
выбирается в пределах 50 -150 мм) и строится
вектор ускорения точки B.
anB
b´
at
B
a = … мм/(м с-2)
Назад…
Далее…
В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ ИДО
12.
Кинематический анализ плоского рычажного механизма методом планов5
F
3
2
4
2
S4
aС = aB + anCB + atCB .
AC
CB
CB
C
В этом векторном уравнении:
нормальная составляющая a nCB направлена
звену 2, а величина ее рассчитывается по
формуле
S2
4
B
a = …
l = … мм/м
1
мм/(м с-2)
1
pa
aC
с´ aCB
atCB
anCB = 22·lBC ,
тангенциальная составляющая a tCB направлена
звену 2, а ускорение aC направлено по
траектории движения звена 3 - AC.
A
1
Ускорение точки C звена 2 определяем по
уравнению плоского движения
aB
anB
b´ atB
anCB
Графически это уравнение решается так:
• на плане ускорений из конца вектора aB проводится
прямая BC и на ней откладывается в масштабе μa
отрезок, изображающий составляющую относительного
ускорения anCB,
• из
конца этого отрезка проводится прямая звену 2
(направление тангенциальной составляющей atCB ), а из
полюса проводится AC (направление ускорения aC),
• точка пересечения этих направлений (точка c’)
является решением векторного уравнения.
Назад…
Далее…
В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ ИДО
13.
Кинематический анализ плоского рычажного механизма методом планов5
F
3
2
4
2
S4
aF = aB + anFB + atFB .
AF
FB
FB
C
В этом векторном уравнении:
нормальная составляющая a nFB направлена
звену 4, а величина ее рассчитывается по
формуле
S2
4
B
l = … мм/м
aC
с´
aB
aCB
at
1
1
pa
anB
CB
b´
at
anFB = 42·lFC ,
тангенциальная составляющая a tFB направлена
звену 4, а ускорение aF направлено по
траектории движения звена 5 - AF.
A
1
Ускорение точки F звена 4 определяем по
уравнению плоского движения
a = …
мм/(м с-2)
Графически это уравнение решается так:
• на плане ускорений из конца вектора aF проводится
прямая BF и на ней откладывается в масштабе μa
отрезок, изображающий составляющую относительного
ускорения anFB,
• из
B
aFB aF
anCB
anFB
f´
atFB
конца этого отрезка проводится прямая звену 4
(направление тангенциальной составляющей atFB ), а из
полюса проводится AF (направление ускорения aF),
• точка пересечения этих направлений (точка f’)
является решением векторного уравнения.
Назад…
Далее…
В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ ИДО
14.
Кинематический анализ плоского рычажного механизма методом планов5
F
3
2
4
2
S4
C
S2
4
B
l = … мм/м
A
1
pa
aC
с´
aB
1
1
atCB = n’c’ / a ;
an
aCB
B
• значения ускорений a tFB и aF .
f´
CB
atFB = n”f’ / a ;
aFB aF
b´
n´ an
aC = pac’ / a ;
a = … мм/(м с-2)
atB
atCB
Далее измеряются отрезки плана ускорений
и с помощью масштаба рассчитываются:
• значения ускорений a tCB и aC .
an
FB
n”
at
FB
aF = paff’ / a ;
Назад…
Далее…
В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ ИДО
15.
Кинематический анализ плоского рычажного механизма методом планов5
F
3
2
4
2
C
B
l = … мм/м
A
1
atCB
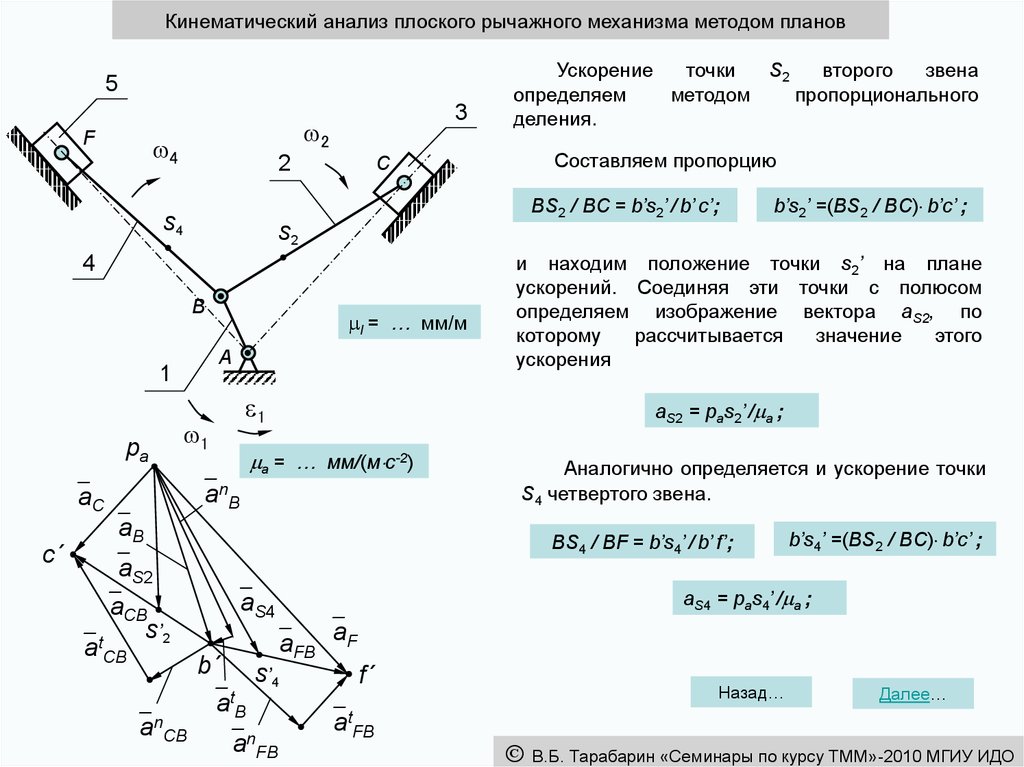
b’s2’ =(BS2 / BC) b’c’ ;
S2
4
aC
aB
с´
aS2
aCB
Составляем пропорцию
BS2 / BC = b’s2’ / b’ c’;
S4
pa
Ускорение
точки
S2
второго
звена
определяем
методом
пропорционального
деления.
1
1
S’2
anCB
aS2 = pas2’ / a ;
a = … мм/(м с-2)
an
и находим положение точки s2’ на плане
ускорений. Соединяя эти точки с полюсом
определяем изображение вектора aS2, по
которому
рассчитывается
значение
этого
ускорения
B
Аналогично определяется и ускорение точки
S4 четвертого звена.
BS4 / BF = b’s4’ / b’ f’;
aS4
b´
atB
b’s4’ =(BS2 / BC) b’c’ ;
aS4 = pas4’ / a ;
aFB aF
S’4
anFB
f´
atFB
Назад…
Далее…
В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ ИДО
16.
Кинематический анализ плоского рычажного механизма методом планов5
4
F
2
ε4
ε2
2
S4
3
C
S2
4
B
A
1
pa
aC
aB
с´
aS2
aCB
atCB
l = … мм/м
1
1
anB
S’2
anCB
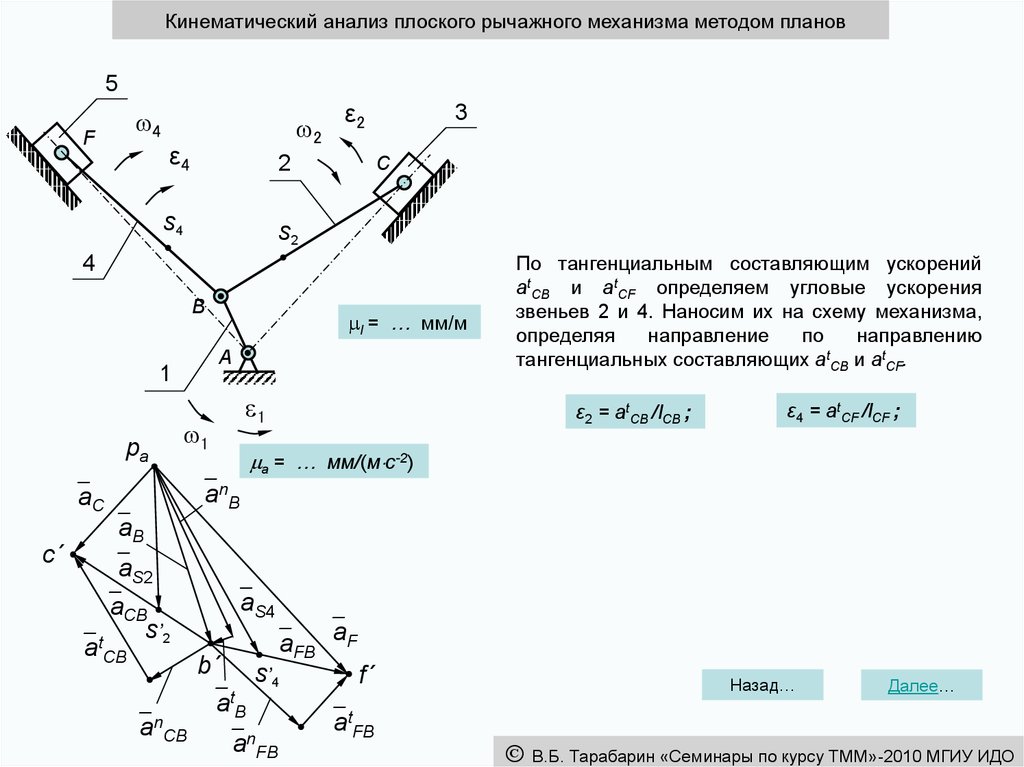
По тангенциальным составляющим ускорений
atCB и atCF определяем угловые ускорения
звеньев 2 и 4. Наносим их на схему механизма,
определяя
направление
по
направлению
t
тангенциальных составляющих a CB и atCF.
ε2 = atCB /lCB ;
ε4 = atCF /lCF ;
a = … мм/(м с-2)
aS4
b´
atB
aFB aF
S’4
anFB
f´
atFB
Назад…
Далее…
В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ ИДО
17.
Кинематический анализ плоского рычажного механизма методом планов5
F
Кинематическая схема механизма
4
2
ε4
ε2
2
3
C
План ускорений
S4
S2
4
B
aC
aB
с´
aS2
aCB
l = … мм/м
A
1
1
1
VS4
s4
VB
atCB
f
VFB
План скоростей
V = … мм/(м с-1)
a = … мм/(м с-2)
pa
VF
pv
anB
S’2
anCB
aS4
b´
atB
aFB aF
S’4
anFB
f´
atFB
b
s2 VS2
VCB
c
VC
Назад…
Далее…
В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ ИДО
18.
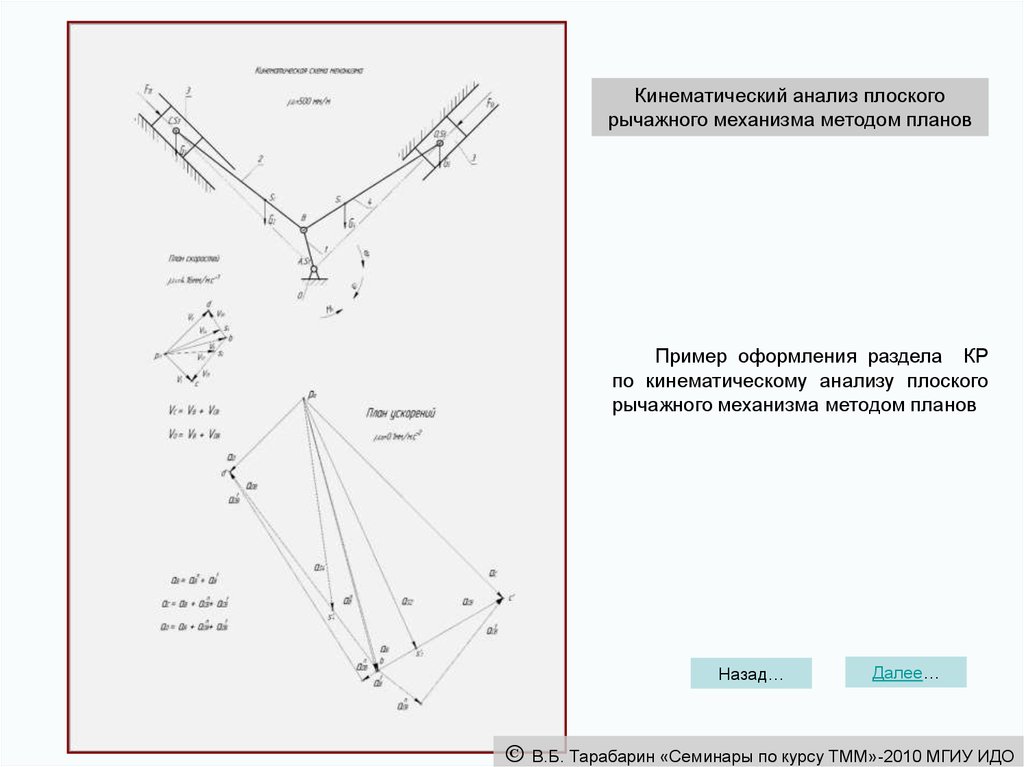
Кинематический анализ плоскогорычажного механизма методом планов
Пример оформления раздела КР
по кинематическому анализу плоского
рычажного механизма методом планов
Назад…
Далее…
В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ ИДО
19.
Методические указания по выполнению первого домашнего заданияЛитература:
1. Теория механизмов и машин, ТММ-11, Методические рекомендации, Сафронов
А.А.,2001
2. Структурное, кинематическое и кинетостатическое исследование плоских рычажных
механизмов графоаналитическими способами, А10-148, Петровский В.В.
3. Теория механизмов и механика машин: Учеб. пособие / О.О. Барышникова, И.В.
Леонов, В.А. Никаноров и др.; под ред. Г.А. Тимофеева. – М.: Изд-во МГТУ им. Н.Э.
Баумана, 2002. – 96с.; ил.
Назад…
В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ ИДО
Далее…