













")



 physics
physicsSimilar presentations:



")




")

Теоретическая механика. Кинематика
1.
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
КИНЕМАТИКА
2. Лекция 8
Сложное движение твердого тела.Сложение поступательных движений.
Сложение вращательных движений.
Сложение поступательного и
вращательного движений.
Общий случай составного движения
тела.
Кинематические инварианты.
3.
Сложноедвижение твердого тела –
такое движение, при котором тело
участвует одновременно в двух или
нескольких движениях.
Все
определения,
касающиеся
составляющих движения, данные для
сложного движения точки, остаются
справедливыми для твердых тел.
4.
Кинематикасложного движения точки
используется здесь для получения новых
соотношений,
описывающих
сложное
движение твердого тела.
Сложение
поступательных движений
твердого тела – При поступательных
движениях все точки твердого тела имеют
одинаковые скорости, что позволяет
использовать
теорему
о
сложении
скоростей точки для сложного движения:
v v v .
a
r
e
5.
Такимобразом, абсолютная скорость
тела, равная скорости одной из точек этого
тела, равна геометрической сумме
переносной
и
относительной
скоростей этого тела.
Сложение
вращательных
движений
твердого тела – здесь рассмотрим два
случая
различного
положения
осей
вращения:
оси вращений параллельны
оси вращений пересекаются.
6.
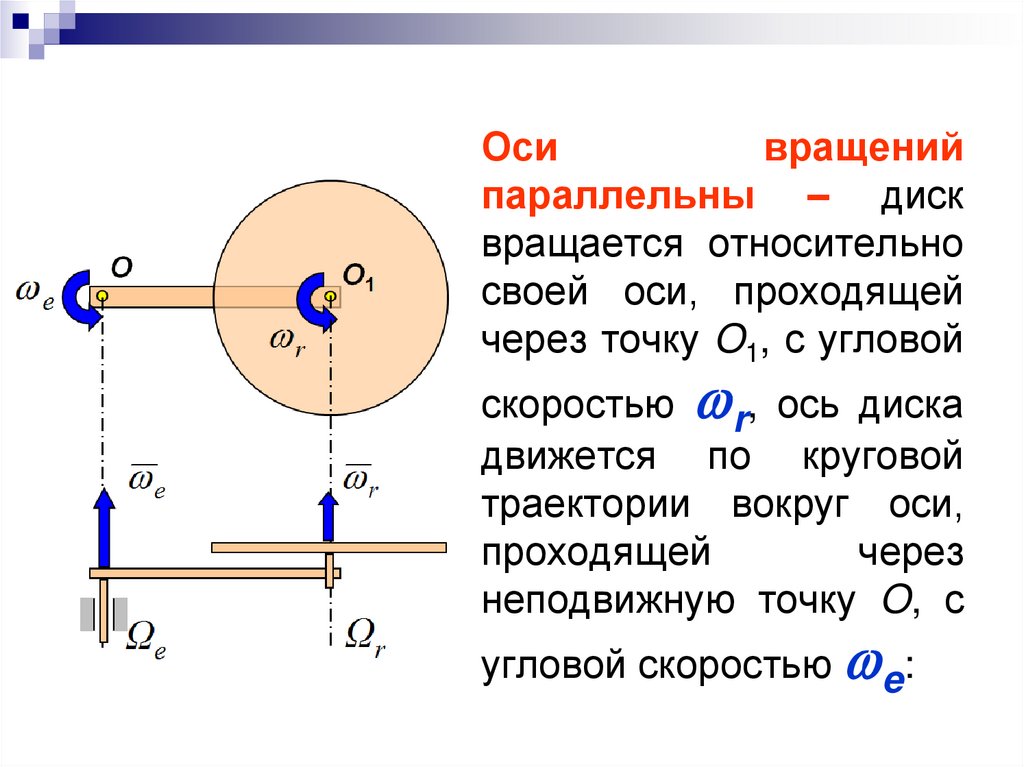
Осивращений
параллельны – диск
вращается относительно
своей оси, проходящей
через точку O1, с угловой
скоростью r, ось диска
движется по круговой
траектории вокруг оси,
проходящей
через
неподвижную точку O, с
угловой скоростью e:
7.
e Oe
Ωe
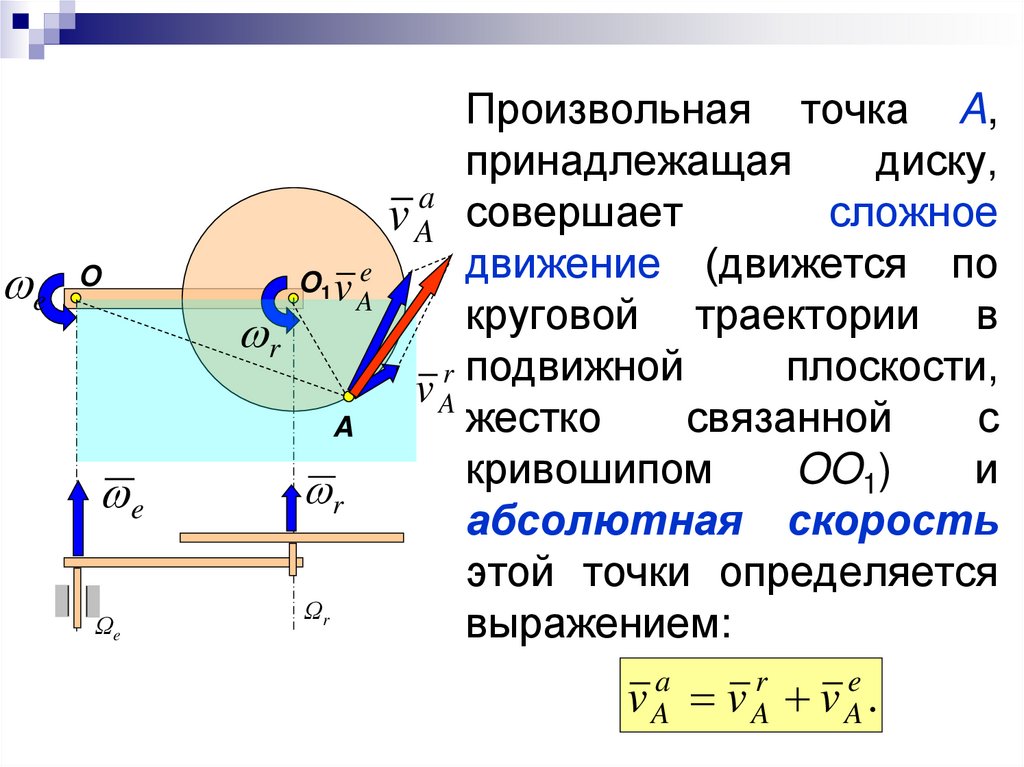
Произвольная точка A,
принадлежащая
диску,
a
сложное
v A совершает
движение (движется по
O1 v e
A
круговой
траектории
в
r
плоскости,
r подвижной
vA
жестко
связанной
с
A
кривошипом
OO
)
и
1
r
абсолютная скорость
этой точки определяется
Ω
выражением:
r
v Aa v Ar v Ae .
8.
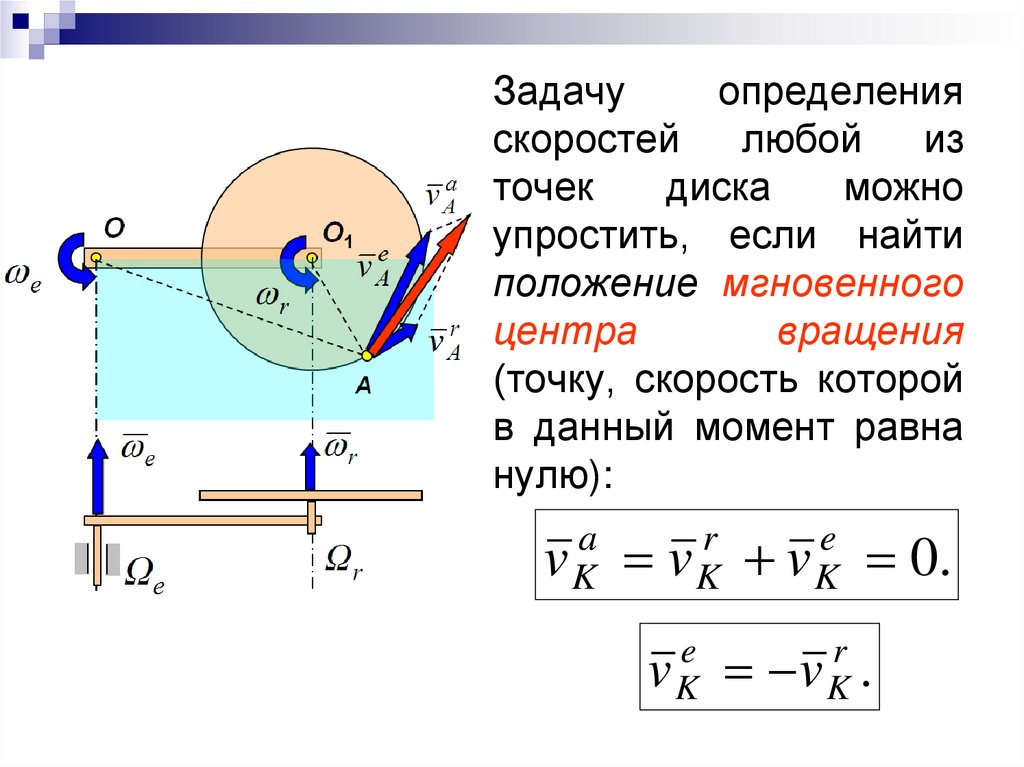
Задачуопределения
скоростей
любой
из
точек
диска
можно
упростить, если найти
положение мгновенного
центра
вращения
(точку, скорость которой
в данный момент равна
нулю):
a
vK
r
e
vK vK
e
vK
0.
r
v K .
9.
v Kee
O
a
vA
K
r
r
vK
e
Ωe
O1 v Ae
v Ar
A
r
Ωr
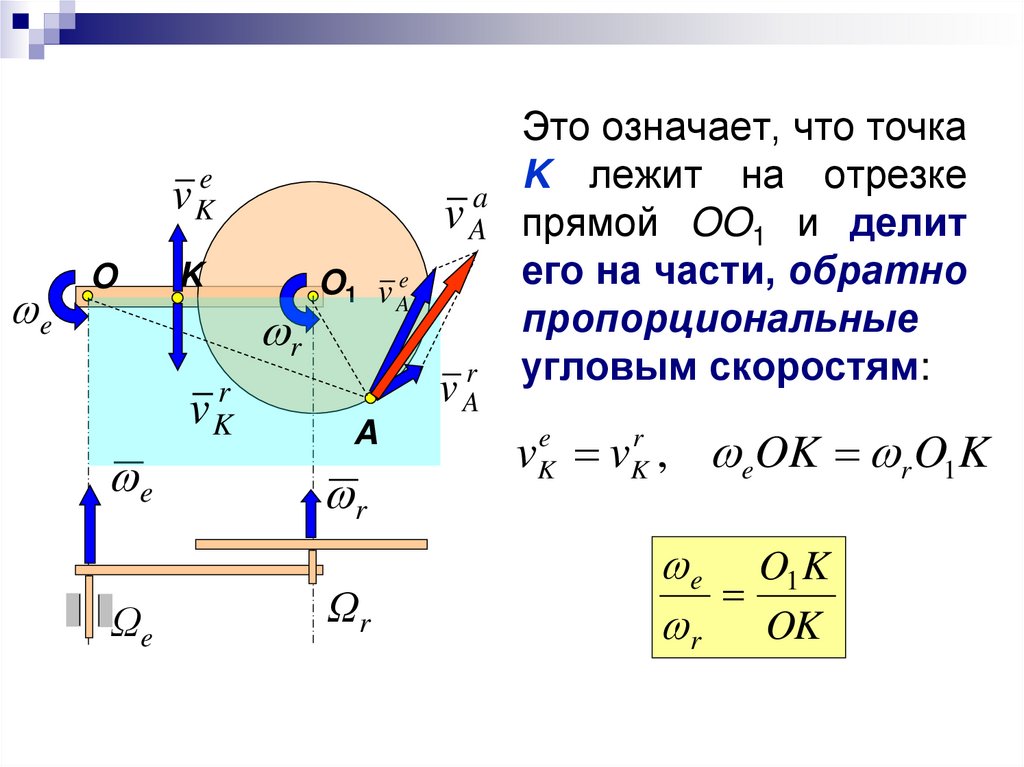
Это означает, что точка
K лежит на отрезке
прямой OO1 и делит
его на части, обратно
пропорциональные
угловым скоростям:
v v , eOK r O1 K
e
K
r
K
e O1 K
r OK
10.
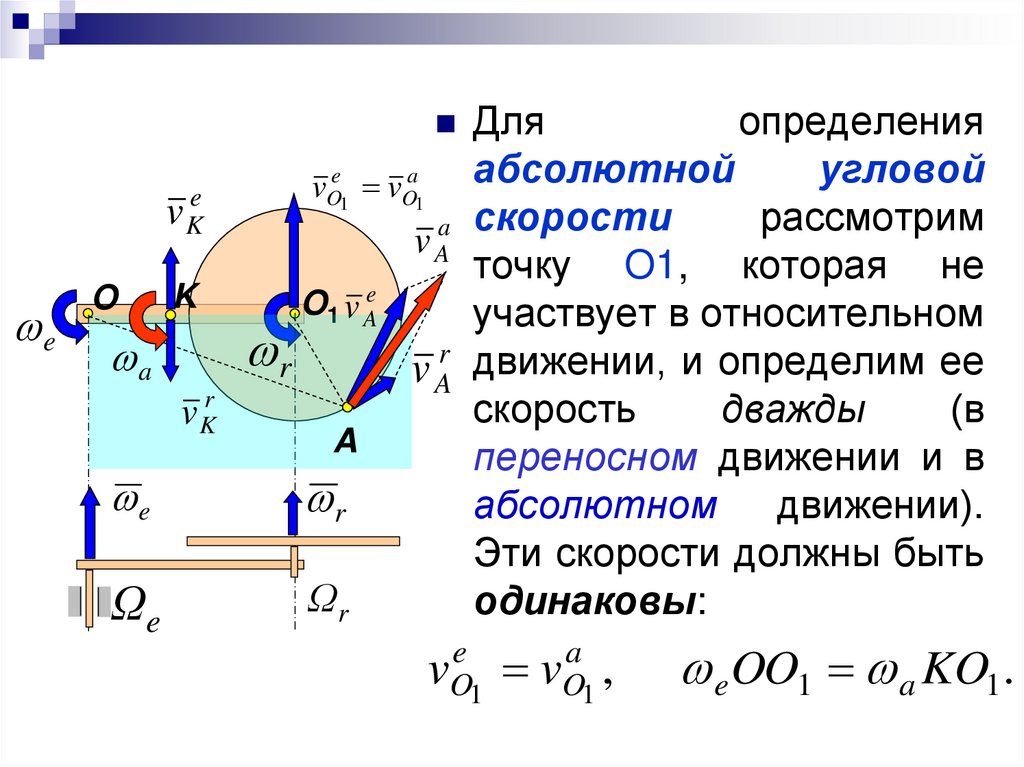
Дляv Ke
e
O
K
a
v Kr
e
Ωe
определения
абсолютной
угловой
vOe1 vOa1
рассмотрим
a скорости
vA
точку O1, которая не
O1 v Ae
участвует в относительном
r движении, и определим ее
r
vA
скорость
дважды
(в
A
переносном движении и в
r
абсолютном движении).
Эти скорости должны быть
Ωr
одинаковы:
vOe1 vOa1 ,
e OO1 a KO1.
11.
Представимотрезок
OO1,
как
сумму
отрезков и отрезок OK
выразим через O1K:
e (OK KO1 )
r
e ( KO1 KO1 )
e
( r e ) KO1 a KO1.
Отсюда:
a e r .
12.
В случае противоположныхпо направлению вращений
деление
отрезка
OO1
происходит так же обратно
пропорционально угловым
скоростям,
но
только
внешним образом (точка K
будет лежать на этой же
линии вне отрезка OO1 со
стороны большего вектора
угловой скорости)
13.
Тогда: OO1 KO1 KOvOe1 vOa1
v Ke
e
O
a
v Aa
K
r
r
vK
e a
Ωe Ω a
O1 e
vA
v Ar
A
r
Ωr
и абсолютная
угловая скорость
будет равна разности
скоростей:
a e r .
Оба соотношения
можно объединить
одним векторным
соотношением:
a e r .
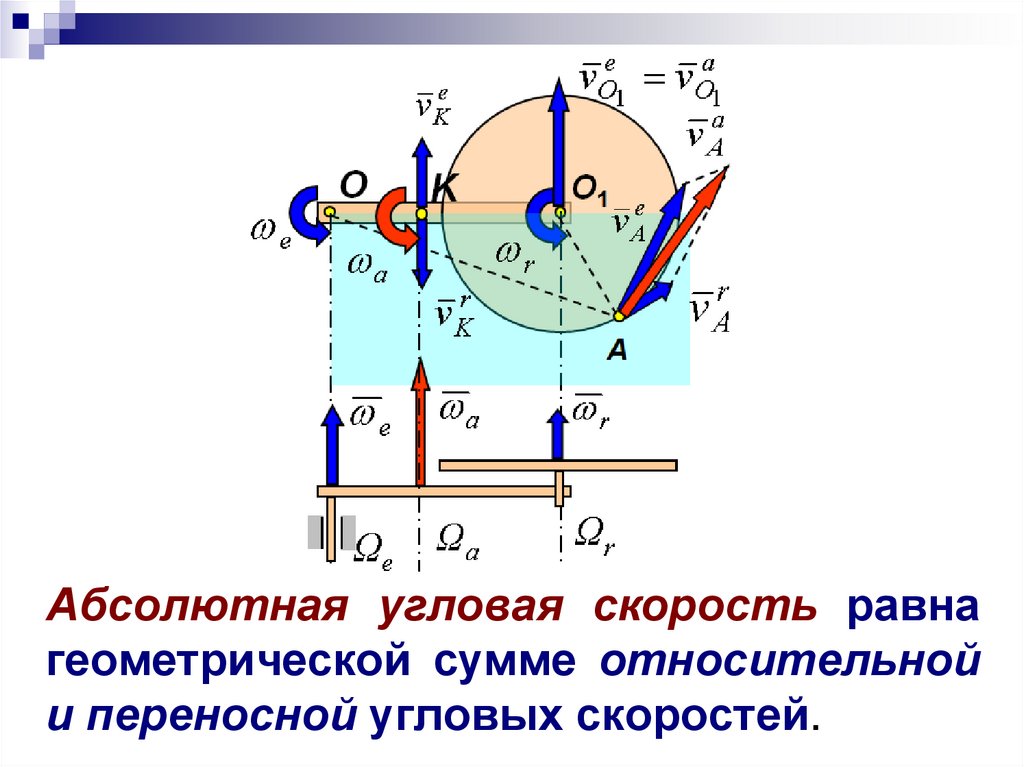
14.
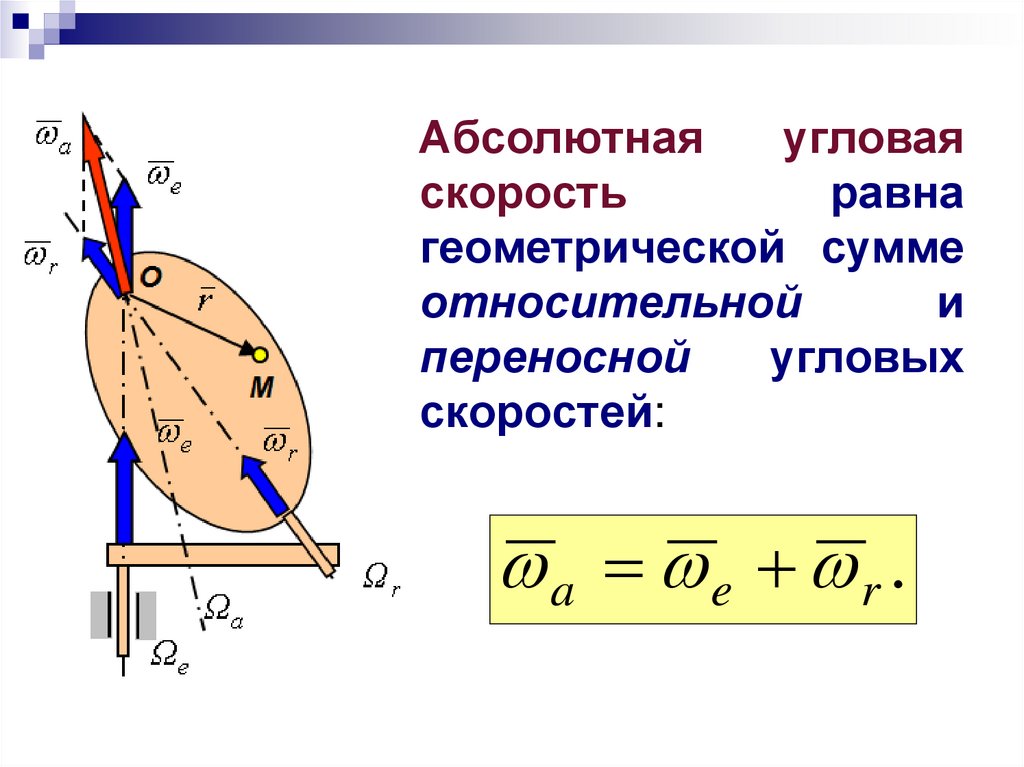
Абсолютная угловая скорость равнагеометрической сумме относительной
и переносной угловых скоростей.
15.
Имеется полная аналогиямежду сложением
векторов угловых
скоростей и сложением
двух параллельных сил.
При сложении таких сил
равнодействующая
приложена в точке,
делящей расстояние
между силами на отрезки,
обратно
пропорциональные силам.
16.
Пара вращений – При сложении двухпараллельных сил, равных по величине и
противоположно направленных между собой
равнодействующая этих сил обращается в
ноль (система таких сил не приводится к
равнодействующей) и эти силы образуют
качественно новую простейшую систему,
называемой парой сил.
При этом действие пары сил характеризуется
моментом пары.
17.
Совершенно аналогично при сложениидвух параллельных векторов угловых
скоростей, равных по величине и
противоположно направленных между
собой, называемых парой вращений,
результирующая угловая скорость
обращается в ноль.
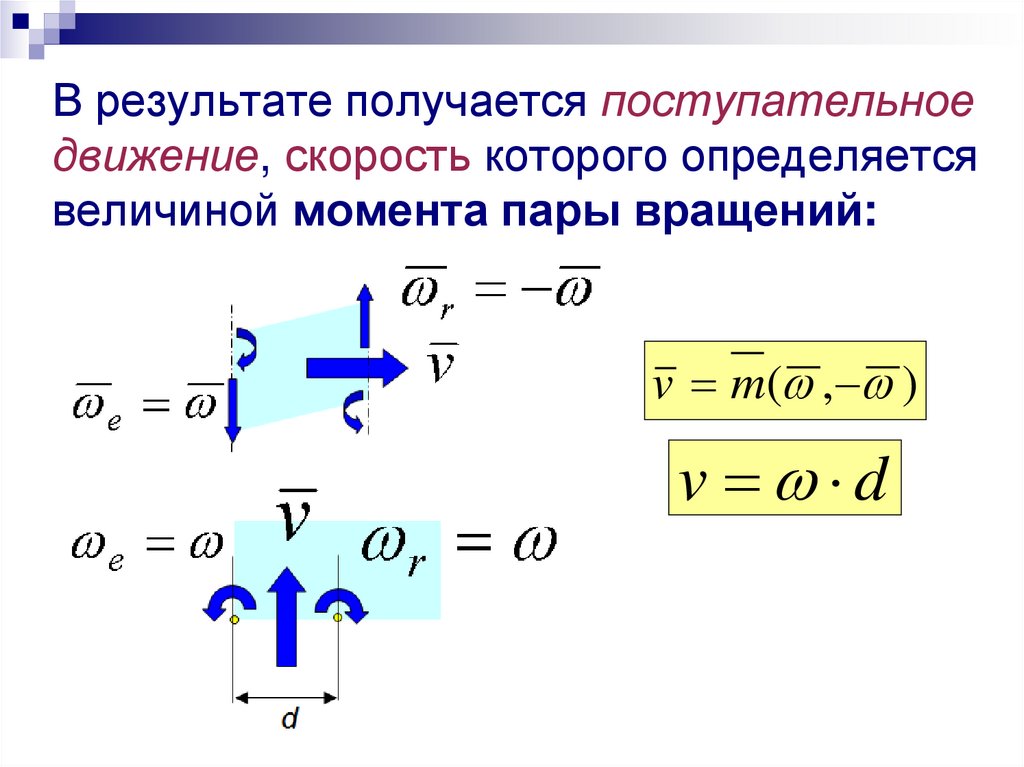
18.
В результате получается поступательноедвижение, скорость которого определяется
величиной момента пары вращений:
v m( , )
v d
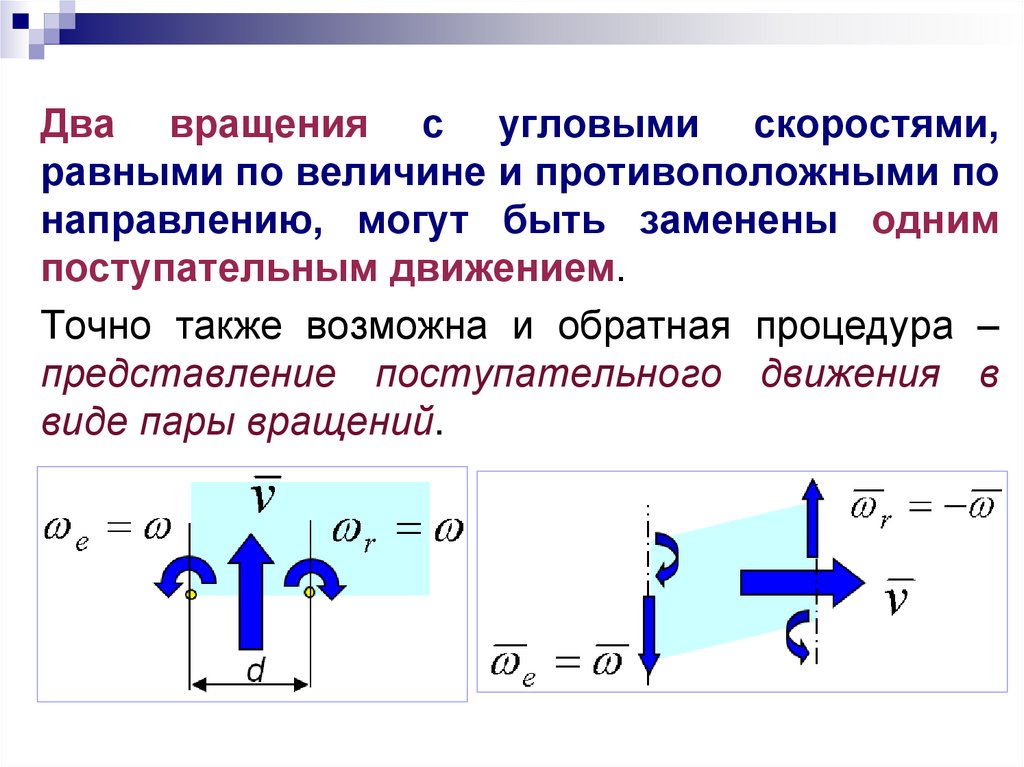
19.
Два вращения с угловыми скоростями,равными по величине и противоположными по
направлению, могут быть заменены одним
поступательным движением.
Точно также возможна и обратная процедура –
представление поступательного движения в
виде пары вращений.
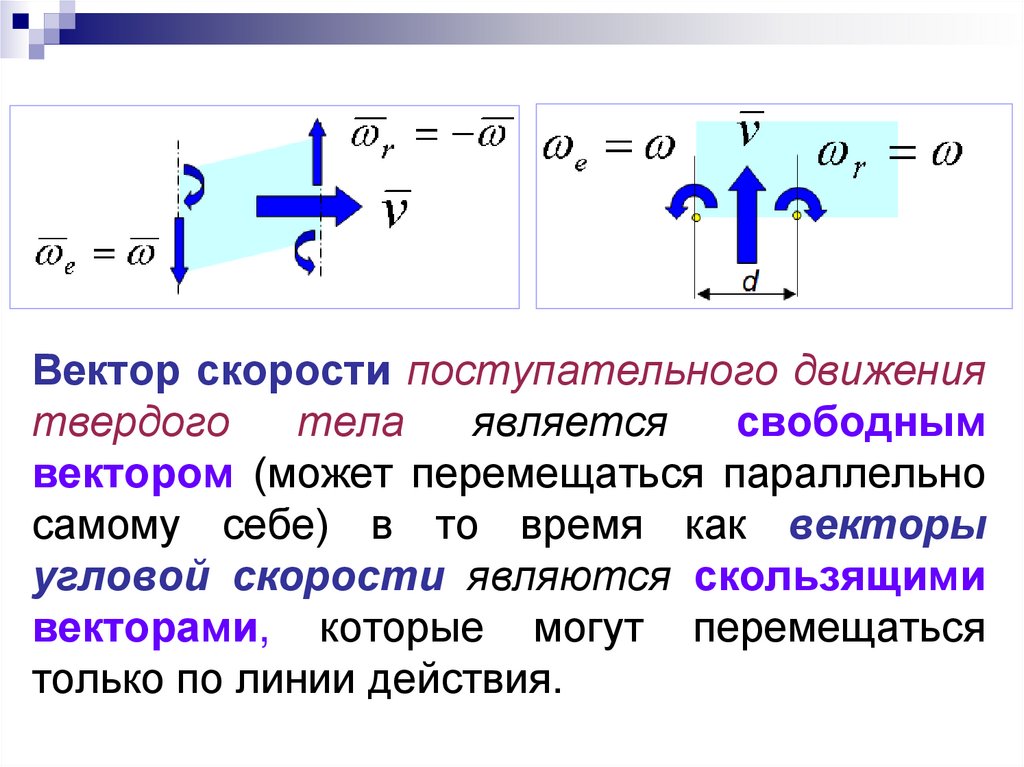
20.
Вектор скорости поступательного движениятвердого
тела
является
свободным
вектором (может перемещаться параллельно
самому себе) в то время как векторы
угловой скорости являются скользящими
векторами, которые могут перемещаться
только по линии действия.
21. Сложение вращательных движений твердого тела в случае пересечения осей вращений
Теловращается
с
угловой
скоростью r относительно
своей оси, проходящей через
точку пересечения с другой
осью вращения O.
Относительно
второй
оси
первая ось вращается с
угловой скоростью e
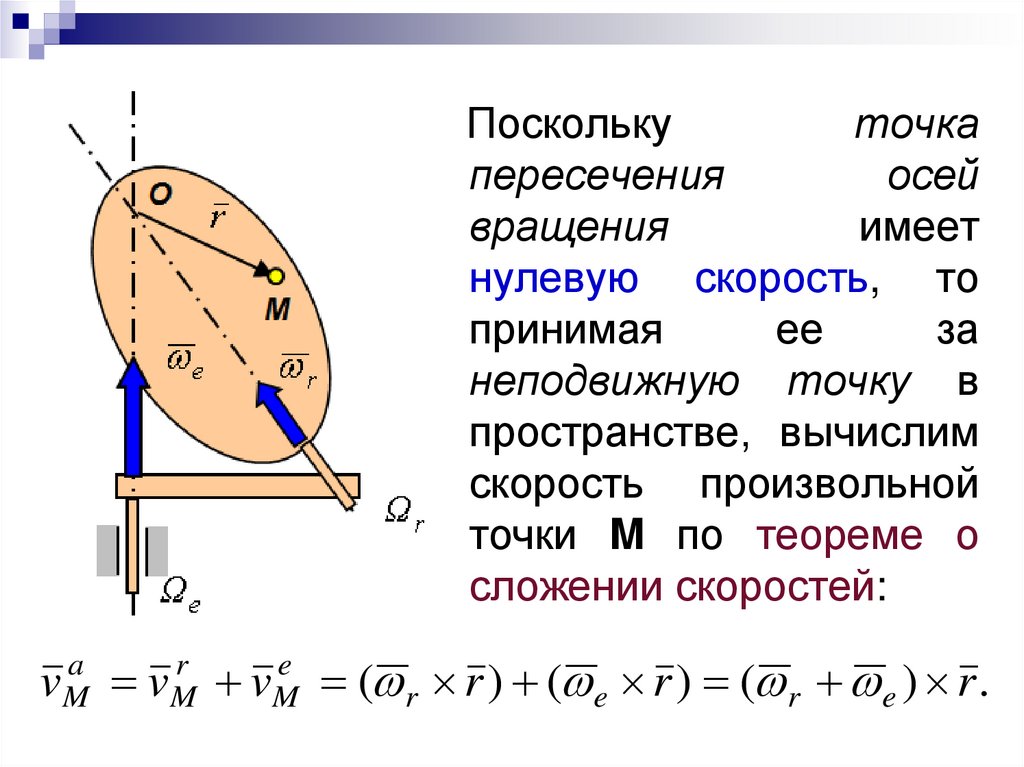
22.
Посколькуточка
пересечения
осей
вращения
имеет
нулевую скорость, то
принимая
ее
за
неподвижную точку в
пространстве, вычислим
скорость произвольной
точки M по теореме о
сложении скоростей:
a
r
e
vM vM vM
( r r ) ( e r ) ( r e ) r .
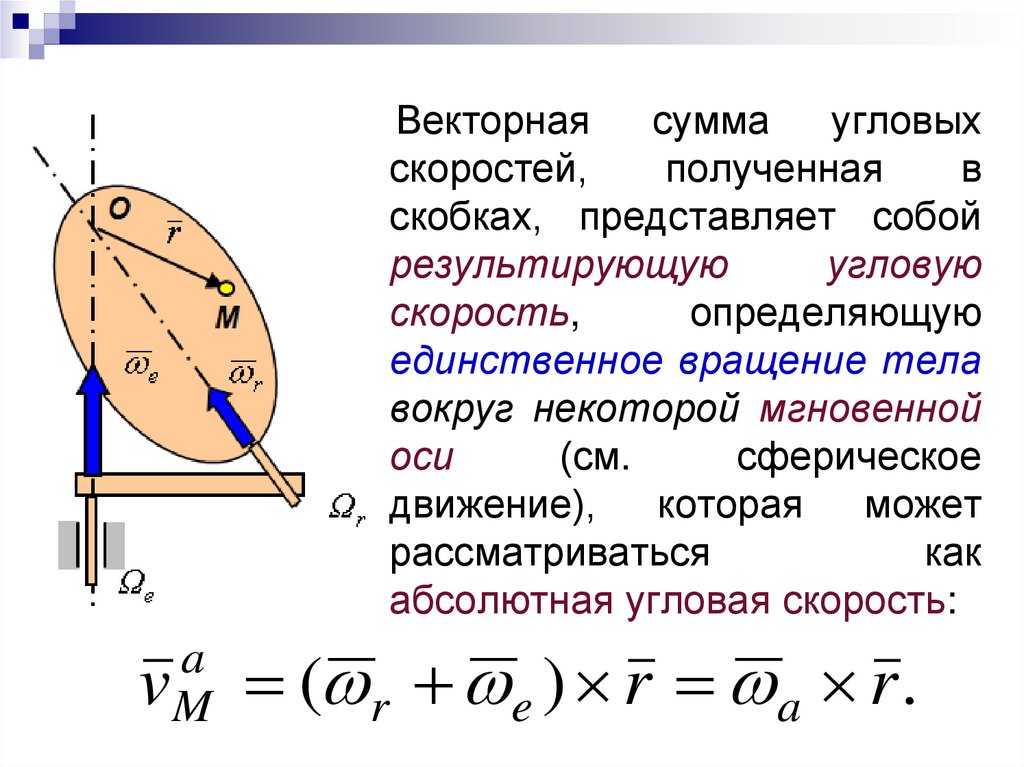
23.
Векторнаясумма
угловых
скоростей,
полученная
в
скобках, представляет собой
результирующую
угловую
скорость,
определяющую
единственное вращение тела
вокруг некоторой мгновенной
оси
(см.
сферическое
движение),
которая
может
рассматриваться
как
абсолютная угловая скорость:
a
vM ( r e ) r a r .
24.
Абсолютнаяугловая
скорость
равна
геометрической сумме
относительной
и
переносной
угловых
скоростей:
a e r .
25.
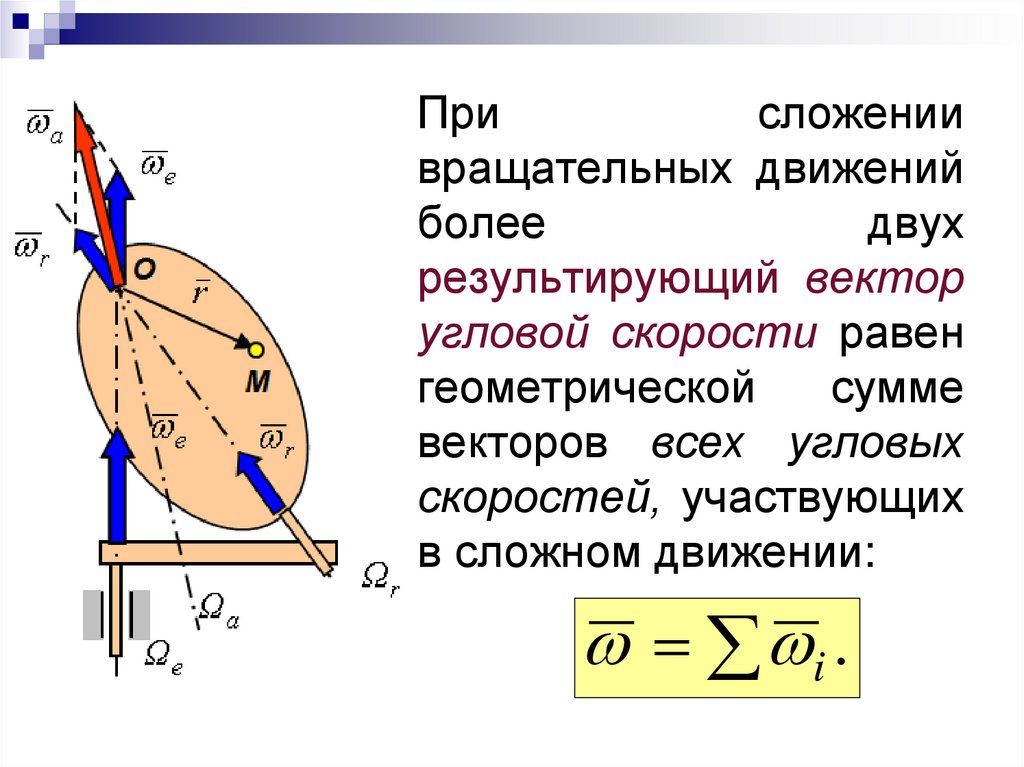
Присложении
вращательных движений
более
двух
результирующий вектор
угловой скорости равен
геометрической
сумме
векторов всех угловых
скоростей, участвующих
в сложном движении:
i .
26. Сложение поступательного и вращательного движения твердого тела
Пустьтело
участвует
во
вращательном движении с
угловой
скоростью
ω
и
поступательном движении со
скоростью v.
Угол
между
векторами
угловой
скорости
и
поступательной
скорости
произвольный.
27.
vv*
O
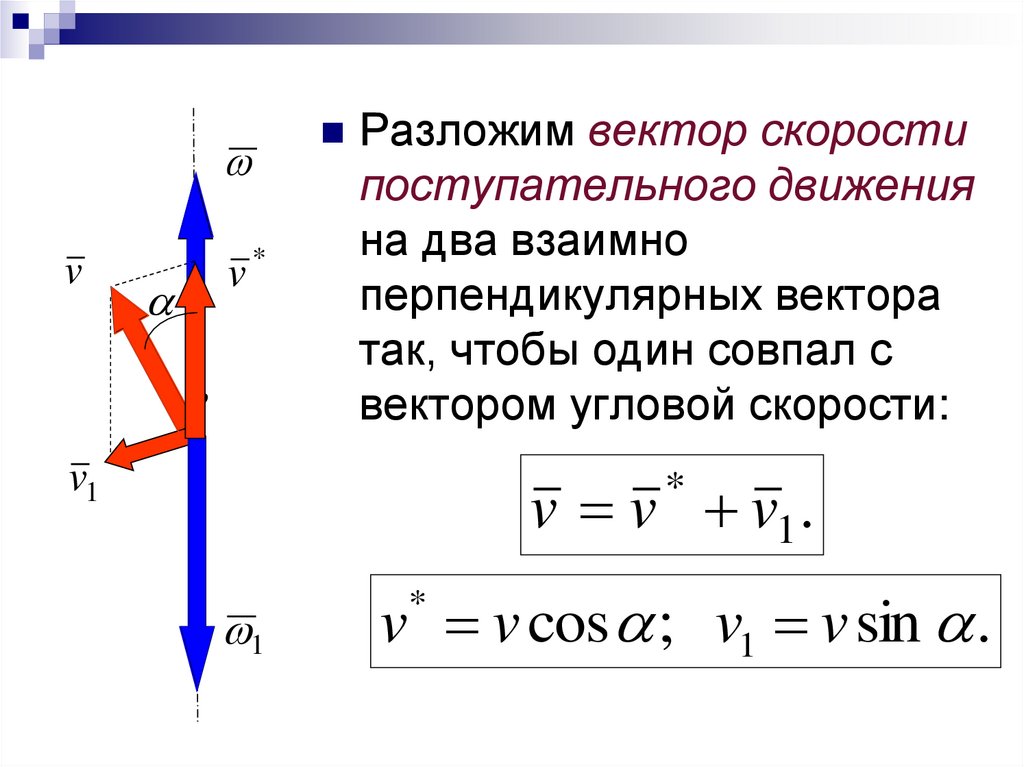
Разложим вектор скорости
поступательного движения
на два взаимно
перпендикулярных вектора
так, чтобы один совпал с
вектором угловой скорости:
v1
v v v1 .
*
1
v v cos ; v1 v sin .
*
28.
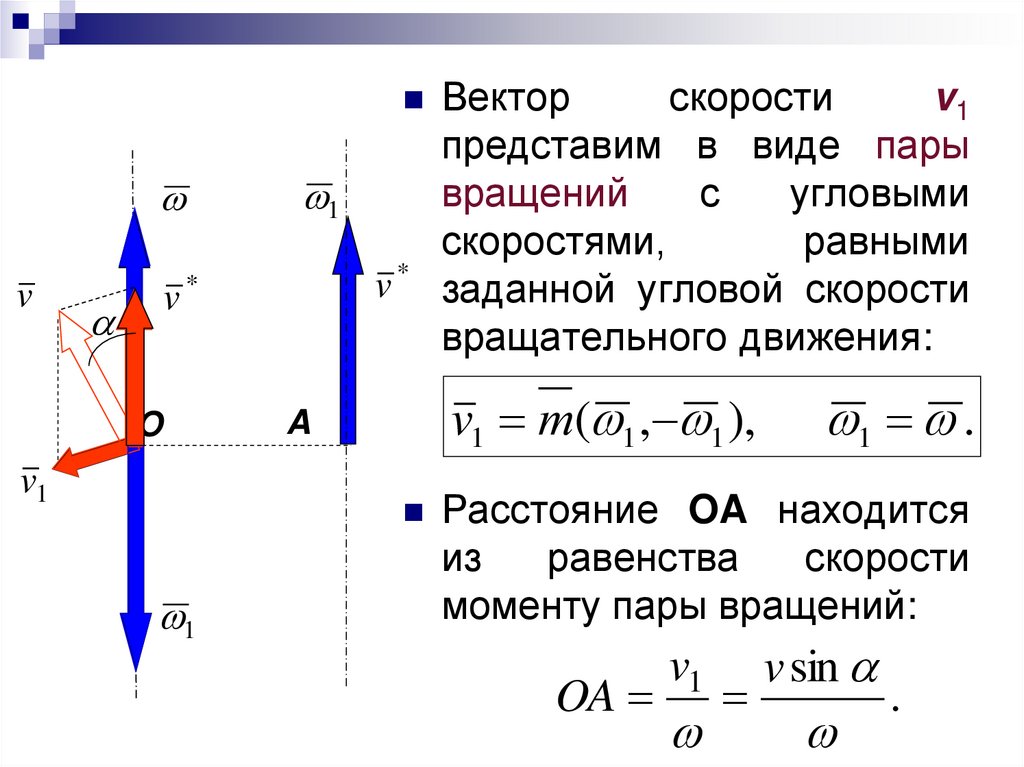
Вектор1
v
v
v*
*
O
v1
A
скорости
v1
представим в виде пары
вращений
с
угловыми
скоростями,
равными
заданной угловой скорости
вращательного движения:
v1 т( 1 , 1 ),
1 .
Расстояние
1
OA находится
из
равенства
скорости
моменту пары вращений:
OA
v1
v sin
.
29.
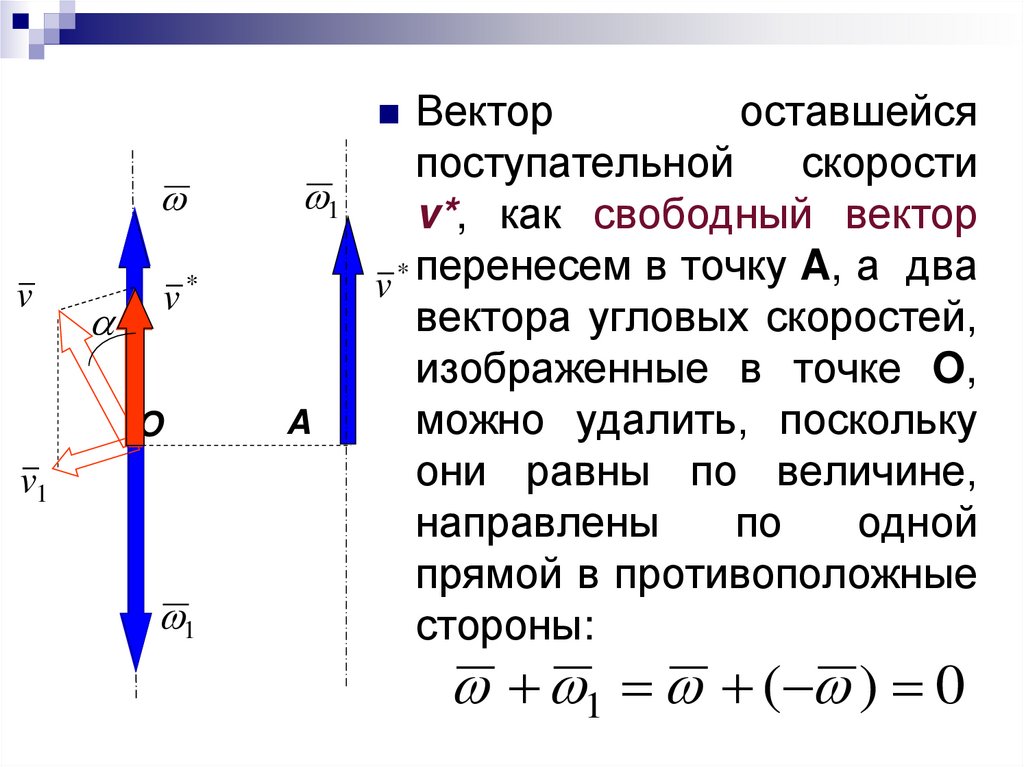
Векторv
1
v*
O
v1
1
A
оставшейся
поступательной
скорости
v*, как свободный вектор
v * перенесем в точку A, а два
вектора угловых скоростей,
изображенные в точке O,
можно удалить, поскольку
они равны по величине,
направлены
по
одной
прямой в противоположные
стороны:
1 ( ) 0
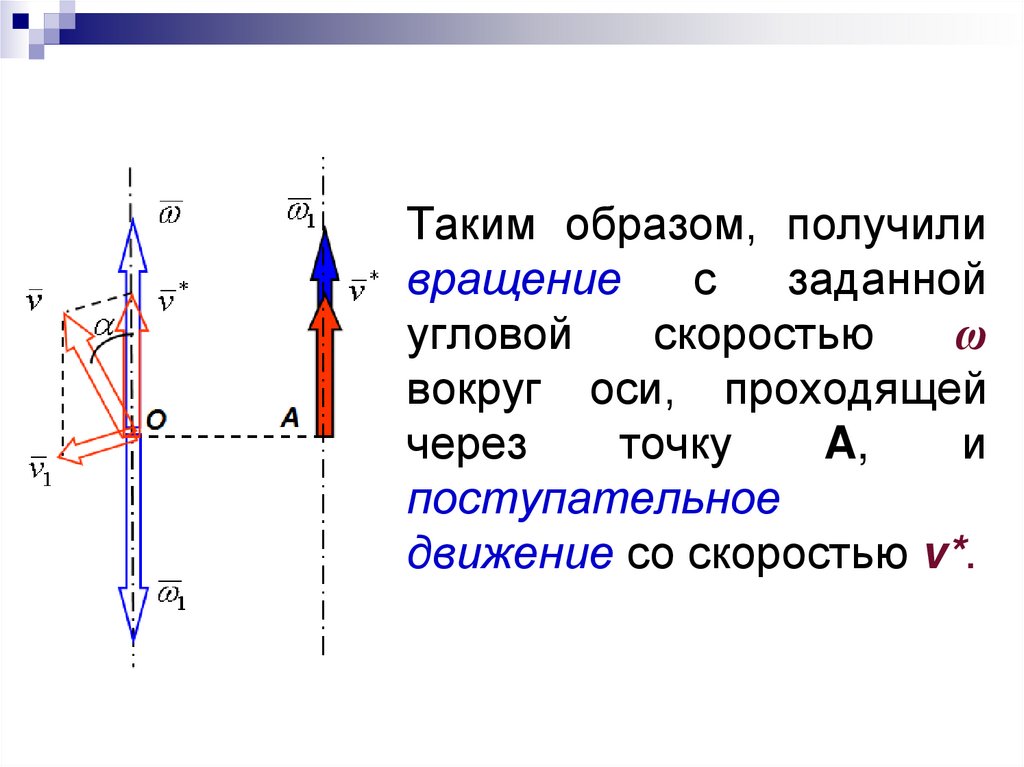
30.
Таким образом, получиливращение
с
заданной
угловой
скоростью
ω
вокруг оси, проходящей
через
точку
A,
и
поступательное
движение со скоростью v*.
31.
Такаякомбинация более
не может быть упрощена и
представляет
собой
кинематический винт,
реализующий
винтовое
движение твердого тела.
Ось,
проходящая через
точку A, вдоль которой
направлен вектор угловой
скорости,
называется
мгновенной
винтовой
осью.
32. Скорость точки твердого тела при винтовом движении
Пусть тело участвует вовращательном движении с
угловой
скоростью
ω1 ,
которое
примем
за
относительное движение,
и
поступательном
движении со скоростью v*,
которое
примем
за
переносное движение.
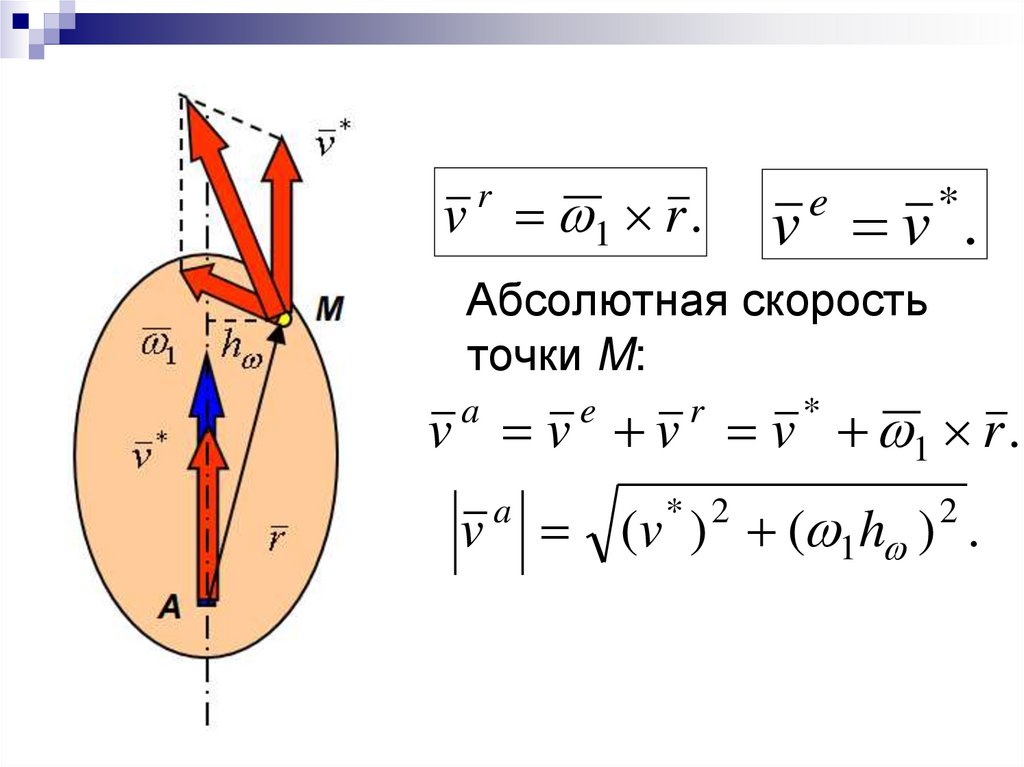
33.
v 1 r .r
v v .
e
*
Абсолютная скорость
точки M:
v v v v 1 r .
a
v
e
a
r
*
(v ) ( 1h ) .
* 2
2
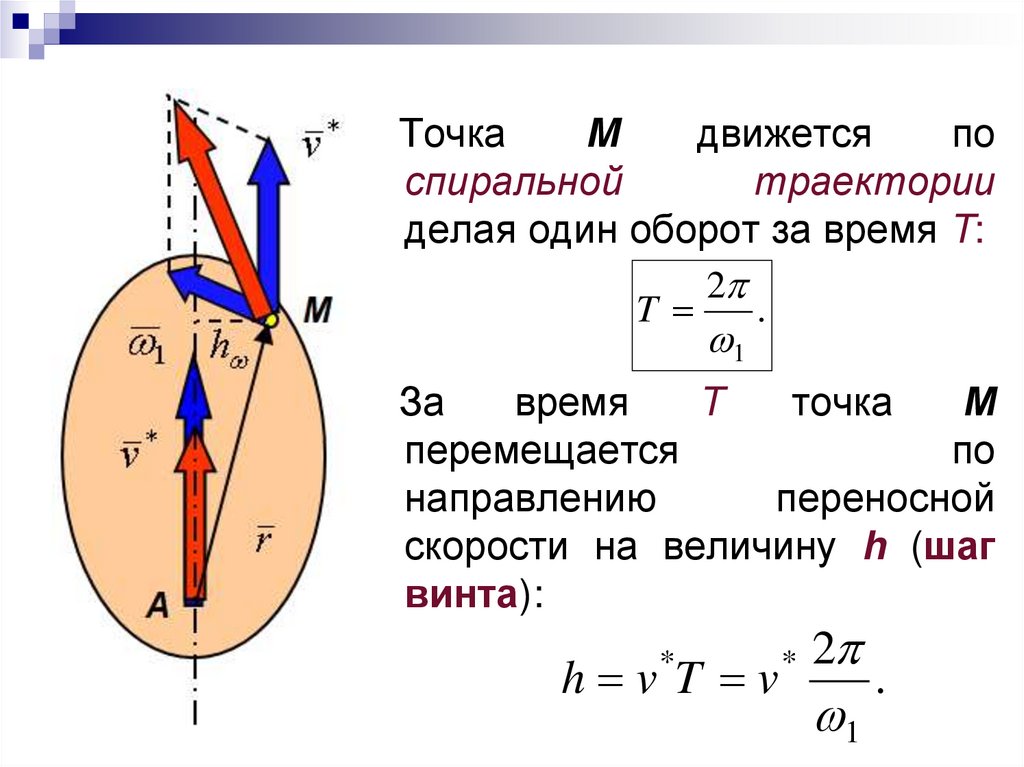
34.
ТочкаM
движется
по
спиральной
траектории
делая один оборот за время T:
2
T
.
1
За
время
T
точка
М
перемещается
по
направлению
переносной
скорости на величину h (шаг
винта):
h v T v
*
* 2
1
.
35.
Отношение поступательнойскорости k угловой скорости
является
характеристикой
винтового
движения
и
называется
параметром
винта:
p
v
*
1
.
С использованием параметра
винта шаг винта:
h 2 p.
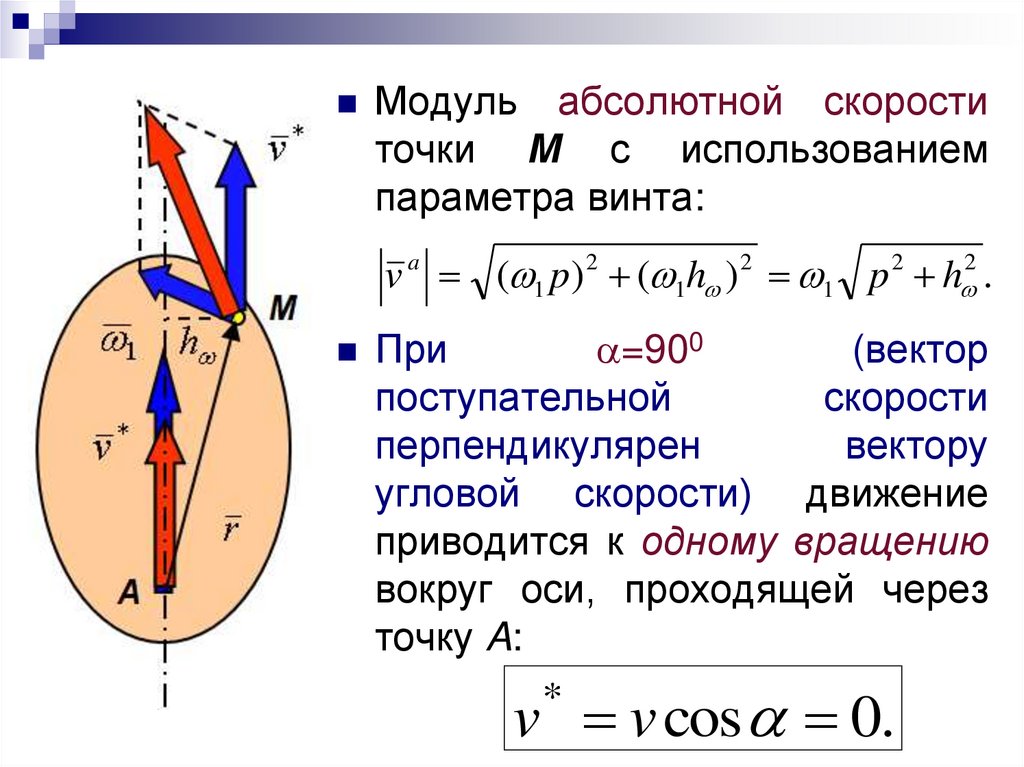
36.
Модульабсолютной скорости
точки M с использованием
параметра винта:
v a ( 1 p) 2 ( 1h ) 2 1 p 2 h 2 .
=900
(вектор
поступательной
скорости
перпендикулярен
вектору
угловой скорости) движение
приводится к одному вращению
вокруг оси, проходящей через
точку A:
*
При
v v cos 0.
37. Общий случай сложного движения твердого тела
Пусть тело участвует в nвращательных движениях
и
m
поступательных
движениях.
1' 1 ; 1'' 1 ;
2' 2 ; 2'' 2 ;
Выберем
полюс
A
и
..................................
приложим в этой точке
'
''
вектора угловых скоростей: n n ; n n .
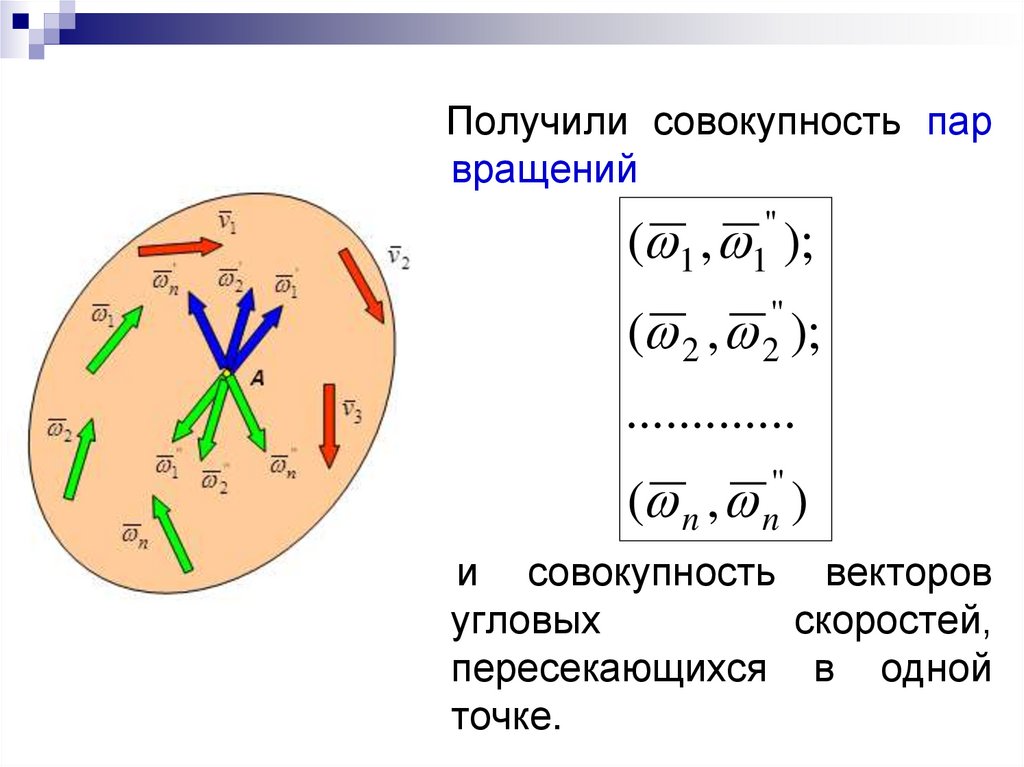
38.
Получили совокупность парвращений
''
( 1 , 1 );
''
( 2 , 2 );
.............
''
( n , n )
и совокупность векторов
угловых
скоростей,
пересекающихся в одной
точке.
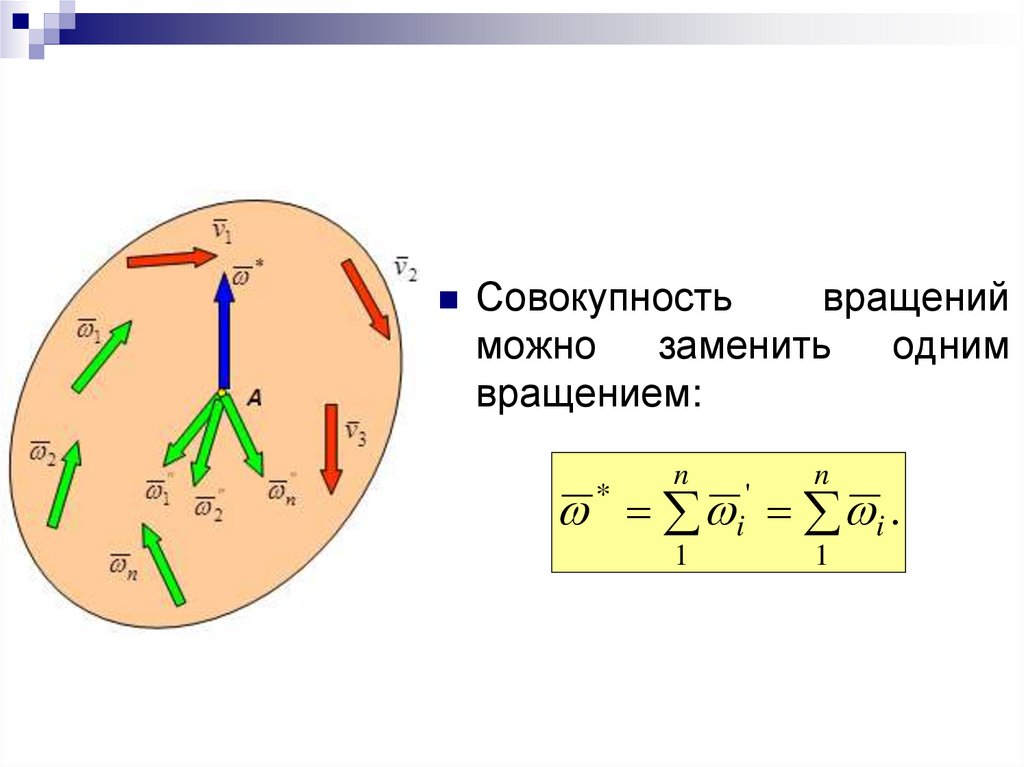
39.
Совокупностьвращений
можно
заменить
одним
вращением:
n
n
i i .
*
1
'
1
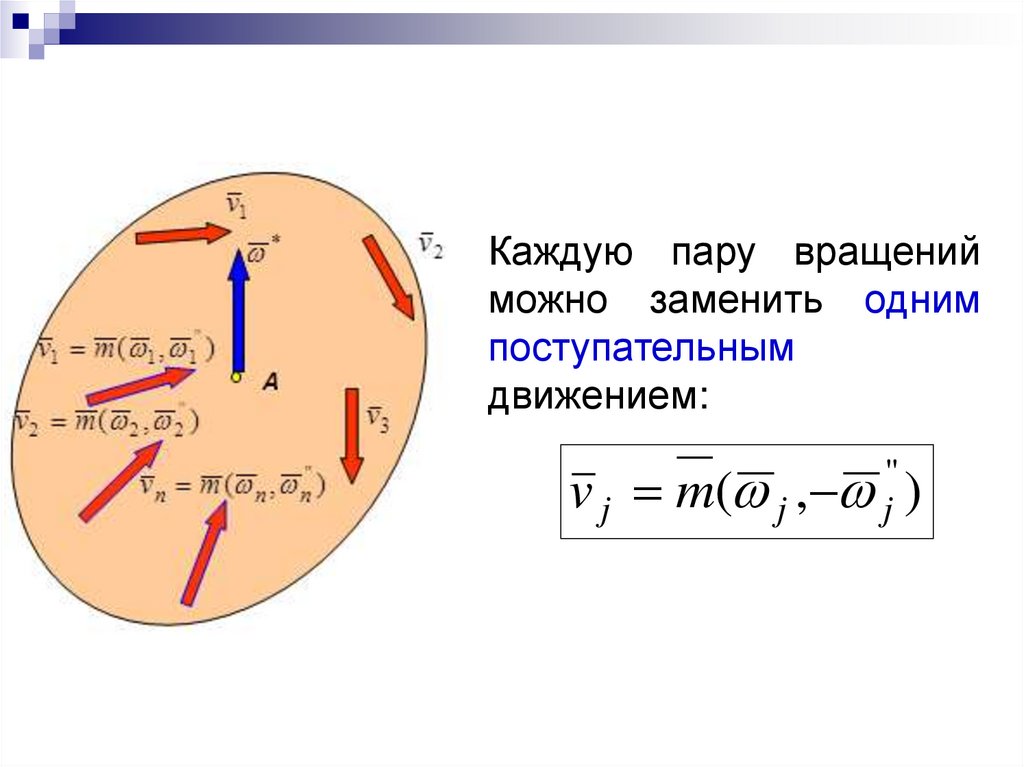
40.
Каждую пару вращенийможно заменить одним
поступательным
движением:
''
v j m( j , j )
41.
Всю совокупностьпоступательных
движений можно
заменить сложением
одним
поступательным
движением:
n
m
n
m
1
1
1
1
v A vi v j vi
''
m( j , j ).
42.
Получаем в общем случаеодно вращение с угловой
скоростью ω* вокруг оси,
проходящей через полюс
A,
и
поступательное
движение со скоростью vA
(A – точка приведения),
что
приводит
к
кинематическому
винту,
рассмотренному выше.
43.
Угловая скорость ω*не зависит от выбора
полюса и это есть
первый (векторный)
инвариант:
n
i J 1 .
*
1
44.
Скорость поступательногодвижения
зависит
от
выбора
полюса,
но
существует
скалярная
величина, связанная с
поступательной скоростью,
инвариантная к выбору
полюса.
45.
Запишем теорему о сложениискоростей,
связывающую
линейные (поступательные)
скорости,
вычисленные
относительно
различных
точек приведения:
vM v A r .
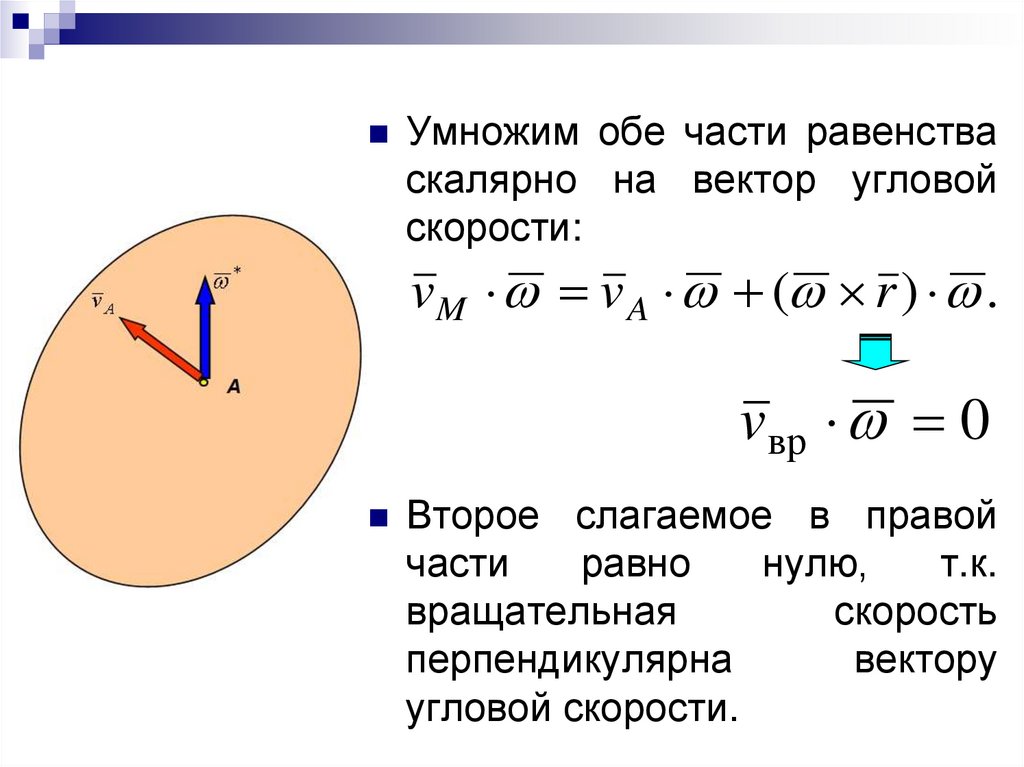
46.
Умножим обе части равенстваскалярно на вектор угловой
скорости:
vM v A ( r ) .
vвр 0
Второе
слагаемое в правой
части
равно
нулю,
т.к.
вращательная
скорость
перпендикулярна
вектору
угловой скорости.
47.
Следовательно,скалярные произведения
векторов поступательных
скоростей, вычисленных
для различных точек
приведения, и вектора
угловой скорости равны:
vM v A J 2
- второй (скалярный)
инвариант.
48.
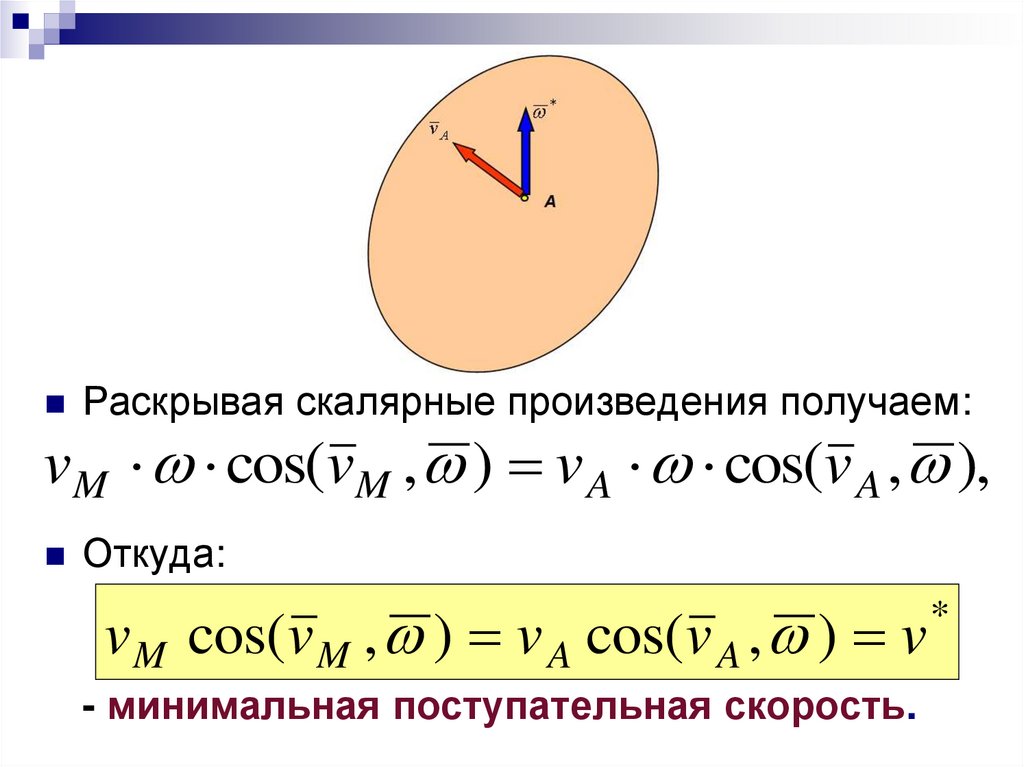
Раскрывая скалярные произведения получаем:vM cos(vM , ) v A cos(v A , ),
Откуда:
v M cos(v M , ) v A cos(v A , ) v
- минимальная поступательная скорость.
*
49.
Итак, угловые скорости в кинематикескладываются так же, как силы в статике
(эти векторы являются скользящими
векторами).
Поступательные
скорости
в
кинематике складываются так же, как
моменты пар в статике (эти векторы
являются свободными векторами).
50. Пример (кинематические инварианты движения твердого тела)
Внекоторый момент времени известны
координаты и скорости трех точек A, B, C
твердого тела, движущегося в пространстве:
A = (2, 1, 0), B = (1, 1, 3), C = (1, 0, 1);
V A (4, 4, 1), V B (16, 23, 5), V C (1, 15, 9).
Найти
кинематические
движения.
инварианты
51. Решение
Кинематические инварианты движения:1. Первый инвариант – угловая скорость.
2. Второй инвариант – скалярное
произведение скорости точки тела на
его угловую скорость.
Определяем угловую скорость тела.
Пусть точка A – полюс.
52.
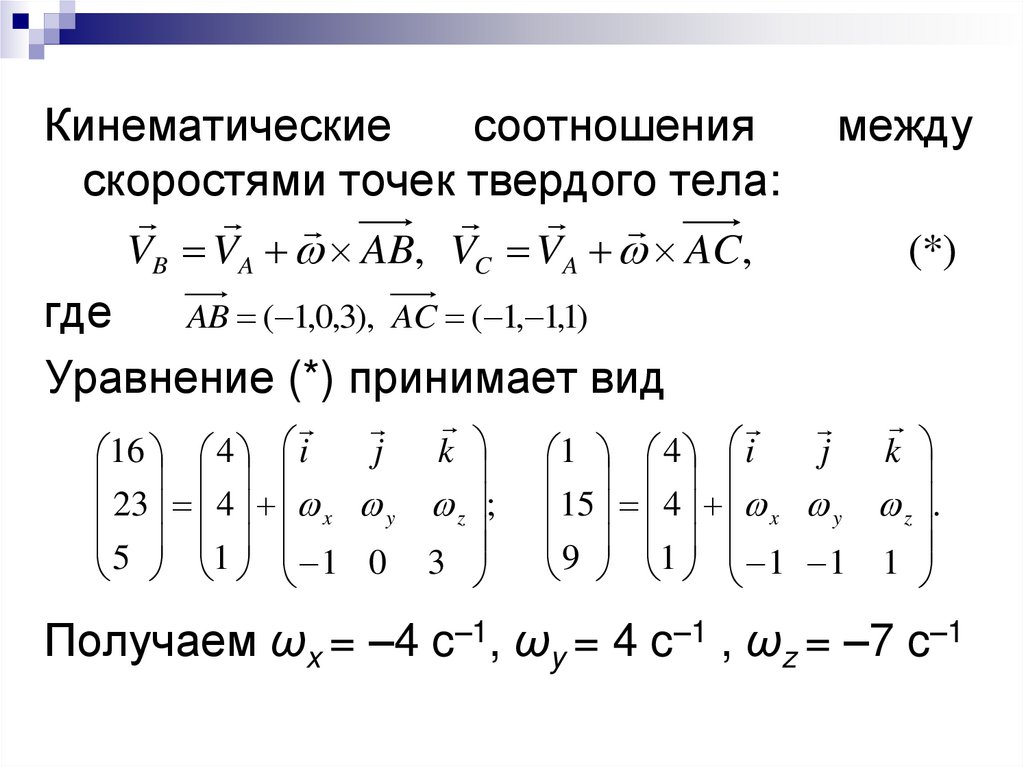
Кинематическиесоотношения
скоростями точек твердого тела:
VB VA AB, VC VA AC,
где
AB ( 1,0,3), AC ( 1, 1,1)
Уравнение (*) принимает вид
j
k
16 4 i
23 4 x y z ;
5 1
1 0 3
между
(*)
j
k
1 4 i
15 4 x y z .
9 1
1 1 1
Получаем ωx = –4 c–1, ωy = 4 c–1 , ωz = –7 c–1
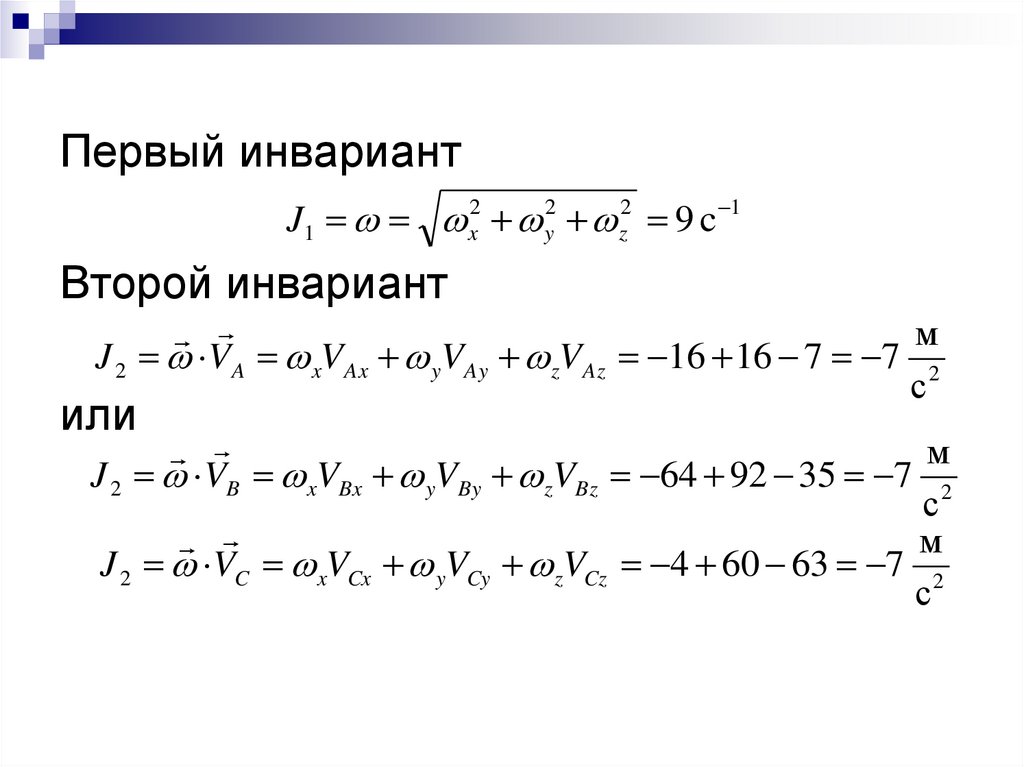
53.
Первый инвариантJ1 x2 y2 z2 9 c 1
Второй инвариант
м
J 2 VA xVAx yVAy zVAz 16 16 7 7 2
с
или
м
J 2 VB xVBx yVBy zVBz 64 92 35 7 2
с
м
J 2 VC xVCx yVCy zVCz 4 60 63 7 2
с
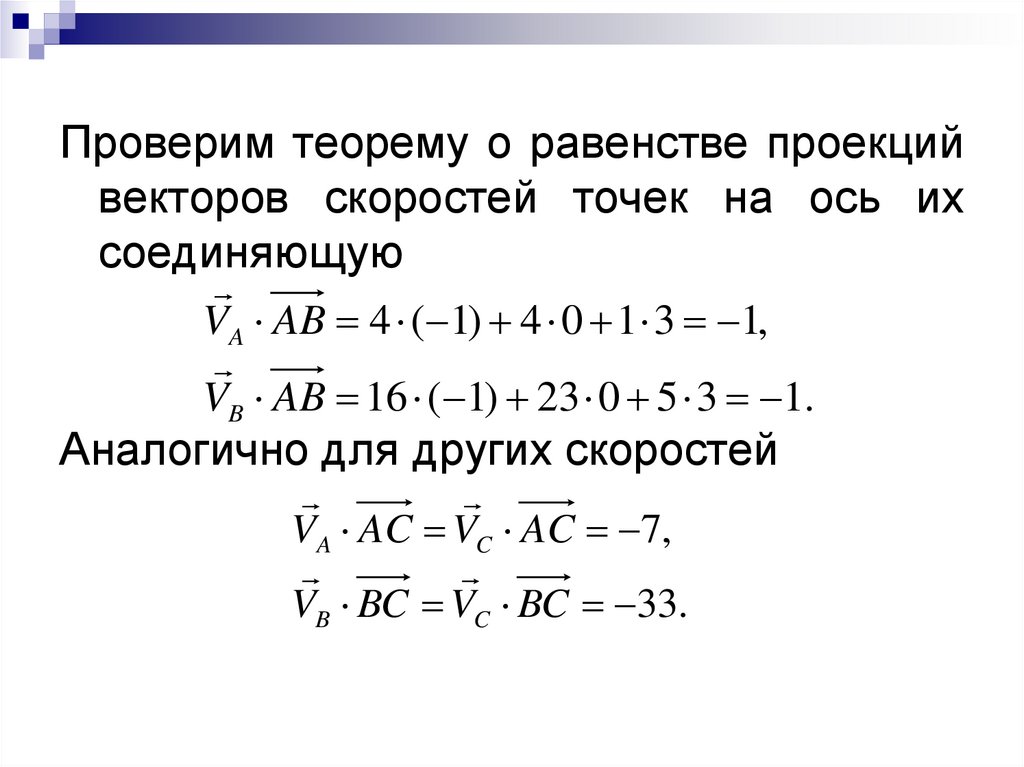
54.
Проверим теорему о равенстве проекцийвекторов скоростей точек на ось их
соединяющую
VA AB 4 ( 1) 4 0 1 3 1,
VB AB 16 ( 1) 23 0 5 3 1.
Аналогично для других скоростей
VA AC VC AC 7,
VB BC VC BC 33.
55.
Данноедвижение
тела
является
мгновенно-винтовым, т.к. J2 ≠ 0. Если бы
второй инвариант был бы равен нулю, то
движение было бы вращательным или
мгновенно-вращательным. Для плоского
движения, например, скорости всегда
перпендикулярны
вектору
угловой
скорости, и J 2 V 0.
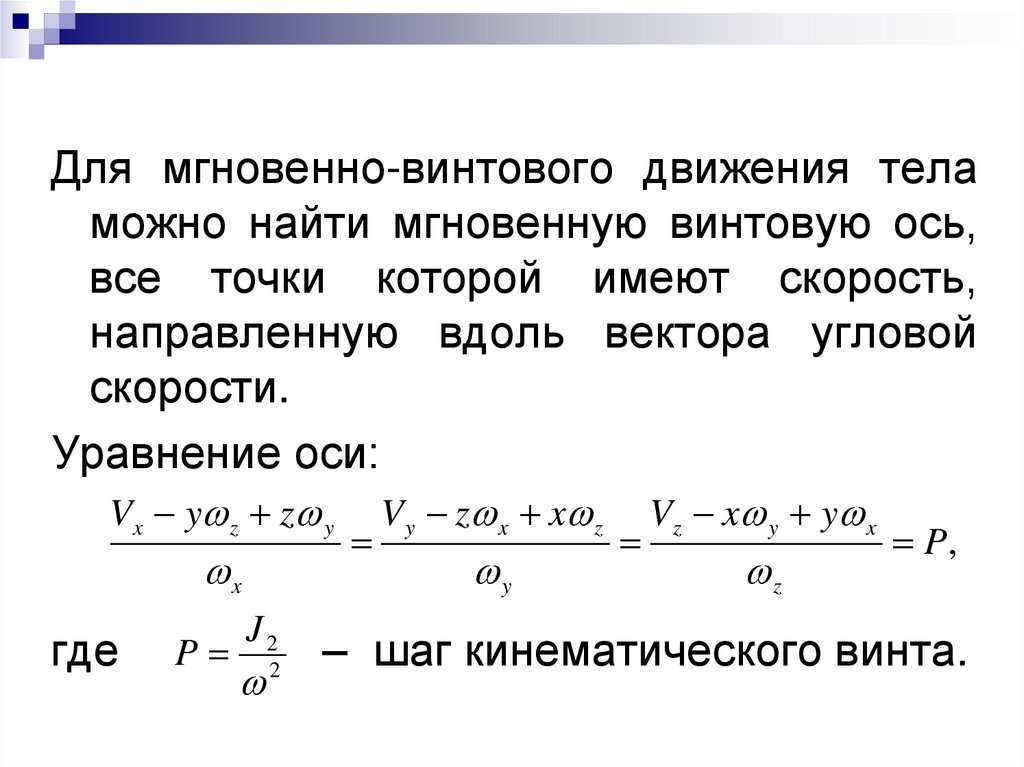
56.
Для мгновенно-винтового движения теламожно найти мгновенную винтовую ось,
все точки которой имеют скорость,
направленную вдоль вектора угловой
скорости.
Уравнение оси:
Vx y z z y
x
где
P
J2
2
V y z x x z
y
Vz x y y x
z
P,
– шаг кинематического винта.
57.
Все способы преобразования сил ипар
сил
в
статике
подобны
преобразованиям
скоростей
твердого тела в кинематике.
И в статике, и в кинематике при
приведении системы в общем случае
получается статический винт (динама),
и соответственно кинематический винт.
58.
Как в статике, так и в кинематикесуществуют
соответствующие
инвариантные величины (помечены
звездочками)
и
их
производные
(главный минимальный момент и
минимальная
поступательная
скорость).
59. Вопросы
Что понимается под плоским движениемАТТ?
Уравнение плоского движения АТТ.
Разложение плоского движения АТТ на
поступательное
и
вращательное
движение.
Угловая скорость и угловое ускорение
АТТ.
60. Вопросы
Скорость точки тела при плоскомдвижении.
Мгновенный центр вращения.
Ускорения точек АТТ при плоском
движении.
Мгновенный центр ускорений.
Кинематические инварианты.