

















 physics
physics mechanics
mechanicsSimilar presentations:




")
")




Теоретическая механика. (Лекция 1)
1. Теоретическая механика
Лекция №12. Введение
Галилео Галилей(15.02.1564-08.01.1642)
Исаак Ньютон
(15.12.1642-20.03.1727)
3.
Теоретическая механика является наукой, в которойизучаются механические взаимодействия тел.
Основные понятия и определения:
1.
Механическое движение.
2.
Механическое взаимодействие.
3.
Материальная точка (МТ).
4.
Механическая система (МС).
5.
Абсолютно твердое тело (АТТ).
Теоретическая механика делится на 3 основных
раздела: кинематика, статика и динамика.
4. Кинематика
Кинематика изучает движения тел безучета причин, вызвавших это
движение.
Основные темы:
1. Кинематика МТ.
2. Кинематика твердого тела.
5. Кинематика материальной точки. Способы задания движения точки
1.Векторный способ задания движения точки.
Пусть задан вектор OM - движения точки М.
OM r (t ) - радиус-вектор т.М.
Траектория движения
М
r
О
6.
Скоростью точки называется вектор, равныйпервой производной
от радиуса-вектора по
dr
времени: v
r
dt
касательная
М
r
О
v
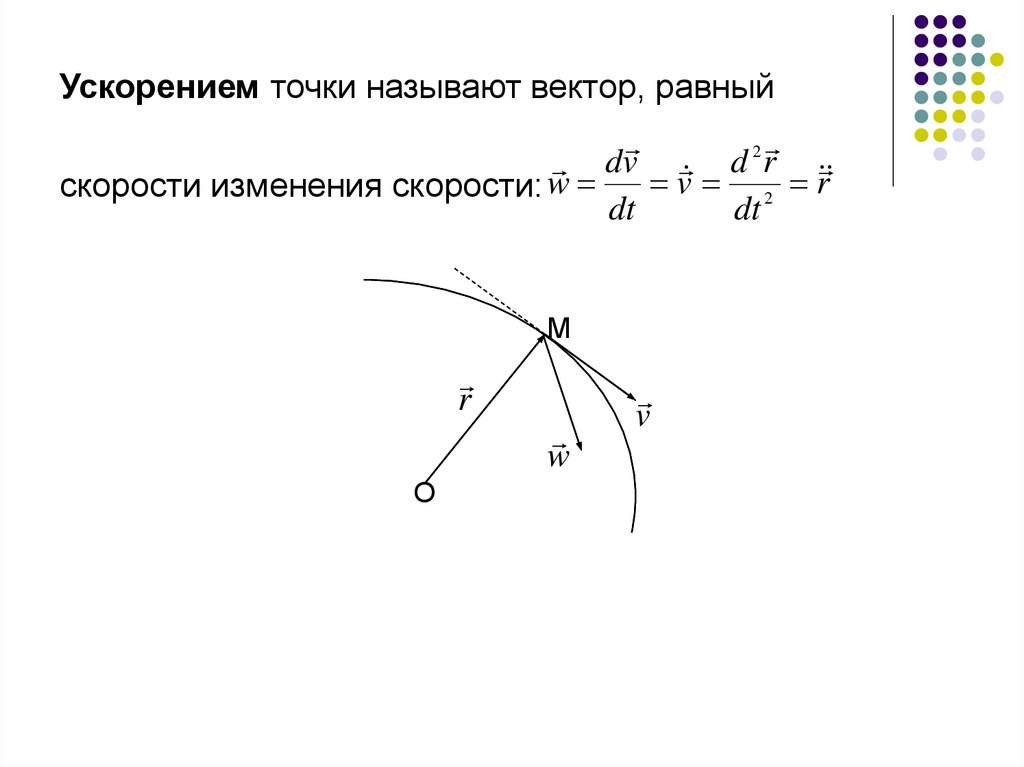
7.
Ускорением точки называют вектор, равныйdv d 2 r
v 2 r
скорости изменения скорости: w
dt
dt
М
r
w
О
v
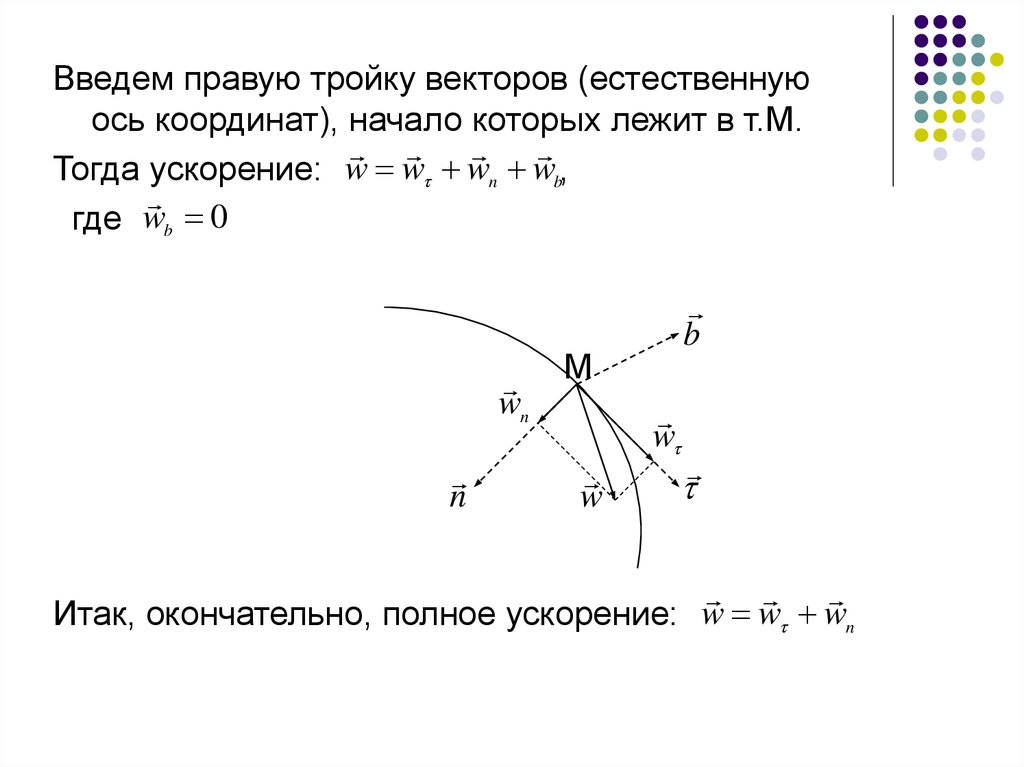
8.
Введем правую тройку векторов (естественнуюось координат), начало которых лежит в т.М.
Тогда ускорение: w w wn wb,
где wb 0
wn
n
b
М
w
w
Итак, окончательно, полное ускорение: w w wn
9. 2. Координатный способ задания движения точки.
Свяжем с точкой О декартову прямоугольнуюсистему координат Оxyz.
М(x,y,z)
z
О
r
y
x
Тогда радиус-вектор можно представить в виде:
r (t ) x(t )i y(t ) j z (t )k
10.
Скорость:dr
v
(vx , v y , vz )
dt
v x x ,
Где v y y , - проекции вектора скорости на оси
v z. координат.
z
v
v v x2 v y2 v z2
Длина вектора скорости:
11.
Полное ускорение:dv
w
( wx , wy , wz )
dt
wx v x x ,
Где w y v y y , - проекции вектора ускорения на
w v z. оси координат.
z
z
Длина вектора полного ускорения:
w w wx2 w y2 wz2
12.
Касательное ускорение:wx vx wy v y wz vz
w
v
Нормальное ускорение:
wn
v2
, где - радиус кривизны траектории
движения.
Полное ускорение:
w w w 2 wn2
13. 3. Естественный способ задания движения точки
s s(t ) М 0 М - дуговая координата (длина дуги,связывающая начальную точку с исследуемой )
s (t )
MO
r (t )
O
M
14. Скорость:
ds- алгебраическое значение скорости
v
dt
(длина вектора)
Ускорение:
d 2s
w 2 s v - касательное ускорение
dt
v2
wn
- нормальное ускорение
15. Частные случаи:
Движение точки называется равномерным, еслиv const и w 0 . Тогда s v t .
2. Движение точки называется равнопеременным,
если w const .
Тогда v v0 w t
1.
t2
s s0 v0t w
2
v 2 v02
w
- формула Галлея.
2s
16. Кинематика твердого тела
Теорема о проекциях скоростей 2 точектвердого тела.
Проекция скоростей двух точек твердого тела на
прямую, соединяющую эти две точки равны,
т.е. прl v A прl v B
Или vA cos vB cos
17. 1. Поступательное движение твердого тела
Определение. Движение твердого тела, прикотором любая прямая жестко связанная с этим
телом, движется параллельно самой себе,
называется поступательным.
Теорема: При поступательном движении твердого
тела траектории, скорость и ускорение двух
точек совпадают.
Вывод:
18. 2. Вращательное движение твердого тела.
2.1. Основные понятия и определения.Определение. Движение твердого тела, при
котором 2 точки, жестко связанные с этим телом,
остаются неподвижными, называется
вращательным.
Определение. Прямая, с заданным положительным
направлением, называется осью вращения.
За положительное направление оси вращения
принято считать направление, с конца которого
вращение видно против часовой стрелки.
19.
Положительное направление осивращения при помощи правила
правой руки.
Характеристикой вращательного движения
является угол поворота: (t ) - функция,
зависящая от времени и как минимум дважды
дифференцируемая.
Если задано количество оборотов N , то 2 N
Размерность: рад
20. 2.2. Угловая скорость и ускорение.
Определение. Алгебраическим значением угловойскорости называют величину, равную d
dt
Вектором угловой скорости называют скользящий вектор,
лежащий на оси вращения, положительное направление
которого определяется также как и направление оси
вращения.
Размерность:
рад 1 с
с
с
1
21.
Определение. Алгебраическим значением угловогоускорения называют величину, равную
d
.
dt
Вектором углового ускорения называют скользящий вектор,
лежащий на оси вращения, положительное направление
которого определяется также как и направление оси
вращения.
Размерность:
рад 1
2 2 с 2
с
с
22. Частные случаи:
ВД считается равномерным, если const и 0 .Тогда . t
1.
2. ВД считается равнопеременным, если const .
Тогда
0 t
t2
0 0 t
2
2 02
0
2