 physics
physicsSimilar presentations:










Кинематический анализ плоских рычажных механизмов. Построение плана скоростей
1.
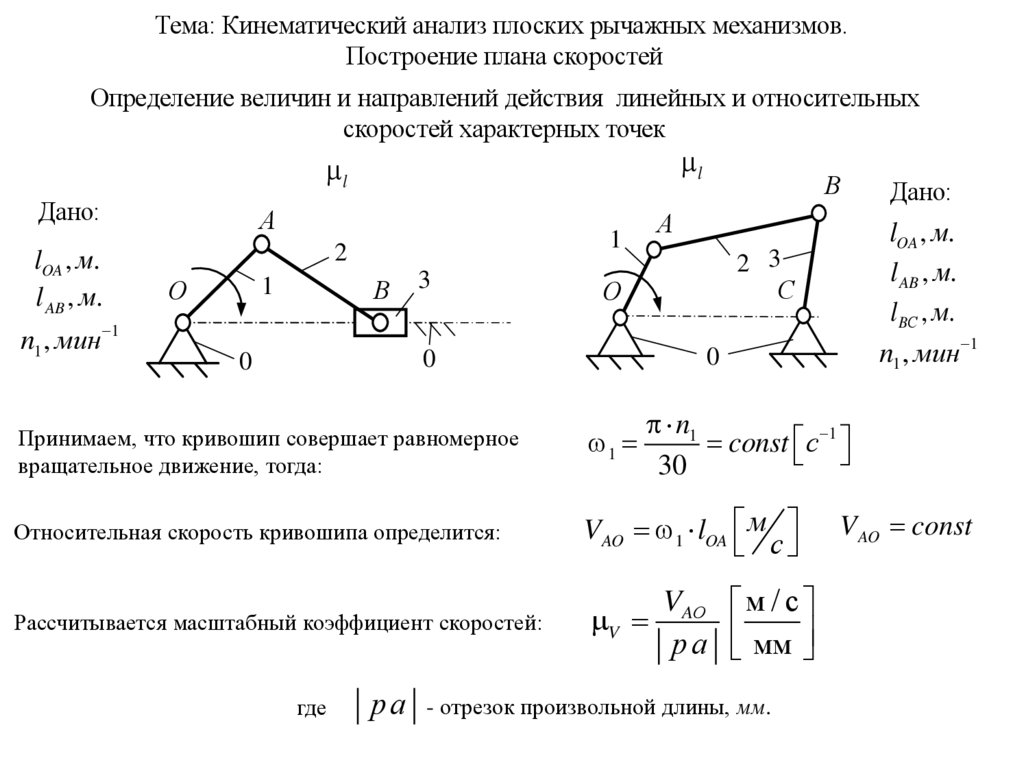
Тема: Кинематический анализ плоских рычажных механизмов.Построение плана скоростей
Определение величин и направлений действия линейных и относительных
скоростей характерных точек
l
l
Дано:
lOA , м.
l AB , м.
n1 , мин 1
А
В
1
О
А
1
2
3
О
0
n1
const с 1
30
Принимаем, что кривошип совершает равномерное
вращательное движение, тогда:
1
Относительная скорость кривошипа определится:
VAO 1 lOA м
с
Рассчитывается масштабный коэффициент скоростей:
V
где
Дано:
lOA , м.
l AB , м.
lBС , м.
n1 , мин 1
2 3
С
0
0
В
VAО м / c
р a мм
р a - отрезок произвольной длины, мм.
VAO const
2.
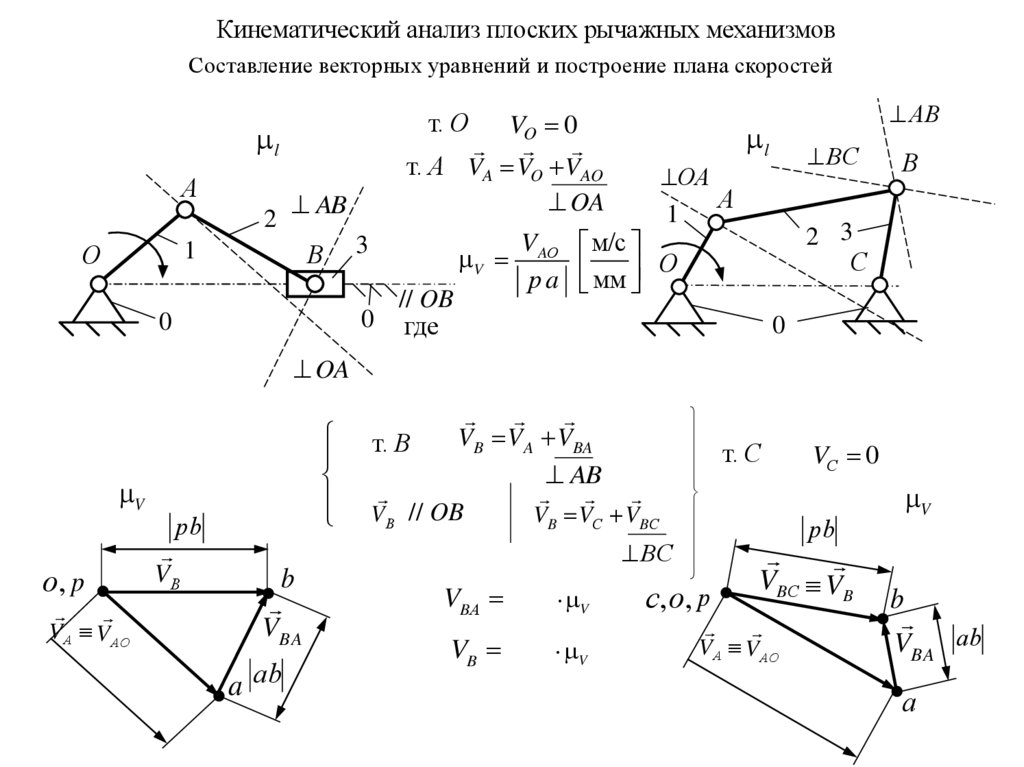
Кинематический анализ плоских рычажных механизмовСоставление векторных уравнений и построение плана скоростей
VO 0
т. А VA VO VAO
OA
т. О
l
А
2
AB
В
1
О
3
0
0
// OB
где
АВ
l
ОА
1
ВС
В
А
2 3
С
V
м/c
V AО
p aаa мм О
р
0
OA
V
о, p
VА VАО
рb
VВ
VB V A VBA
т. В
AB
V В // OB
VB VС VBС
ВС
b
VBA
a аb
VBА
V
VB
V
с, о, р
т. С
VС 0
рb
VBС VB
VА VАО
V
b
VBA аb
а
3.
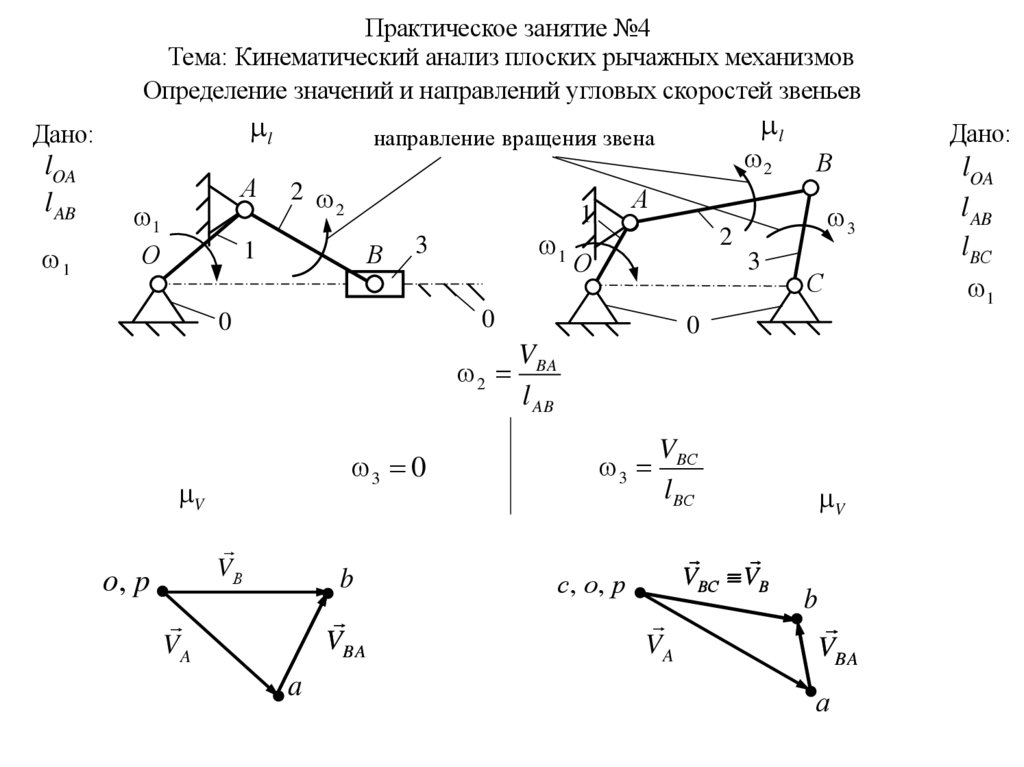
Практическое занятие №4Тема: Кинематический анализ плоских рычажных механизмов
Определение значений и направлений угловых скоростей звеньев
l
Дано:
lOA
l AB
1
А
1
2
2
В
1
О
1
3
2
3 0
V
VВ
b
VBA
VA
a
Дано:
В
А
1
3
2
О
3
0
0
о, p
l
2
направление вращения звена
С
0
VBA
l AB
3
VBС
l BС
VBС VB
с, о, р
VA
V
b
VBA
а
lOA
l AB
l BС
1
4.
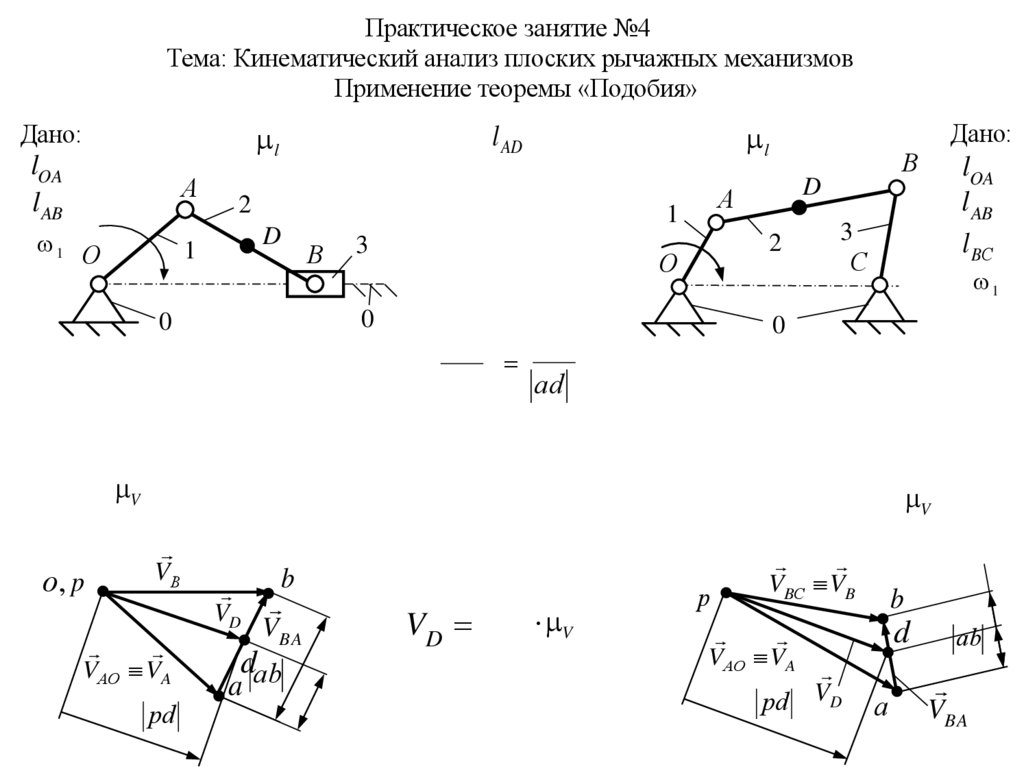
Практическое занятие №4Тема: Кинематический анализ плоских рычажных механизмов
Применение теоремы «Подобия»
l
Дано:
lOA
l AB
А
1 О
1
l
l AD
2
D
В
О
3
С
1
0
аd
V
о, p
lOA
l AB
l BС
D
2
0
0
В
А
1
3
Дано:
V
VВ
VАО VA
рd
VD
b
VBA
dаb
a
VD
V
р
VBС VB
b
d
VАО VA
рd VD
а
аb
VBA