
 physics
physicsSimilar presentations:
 движения твердого тела")
")






")
")
Кинематика плоских механизмов
1.
А.И. РодионовТеоретическая механика.
Ч.1. КИНЕМАТИКА
2.
Лекция №6КИНЕМАТИКА ПЛОСКИХ МЕХАНИЗМОВ
§6.1 Примеры плоских механизмов
• Кривошипно-ползунный (шатунный). Croak rocker
(mechanism).
• Планетарный механизм - (motion less) gear
• Дифференциальный механизм - Drag – link- mech., –
equalizer.
• Эпициклический - epicycle gear
• Гипоциклический - hypocycloid gear
• Эллипсограф - trammel elliptic (mech.)
• Кулачковый механизм - cam (mech.)
I. Driving arbor output
3.
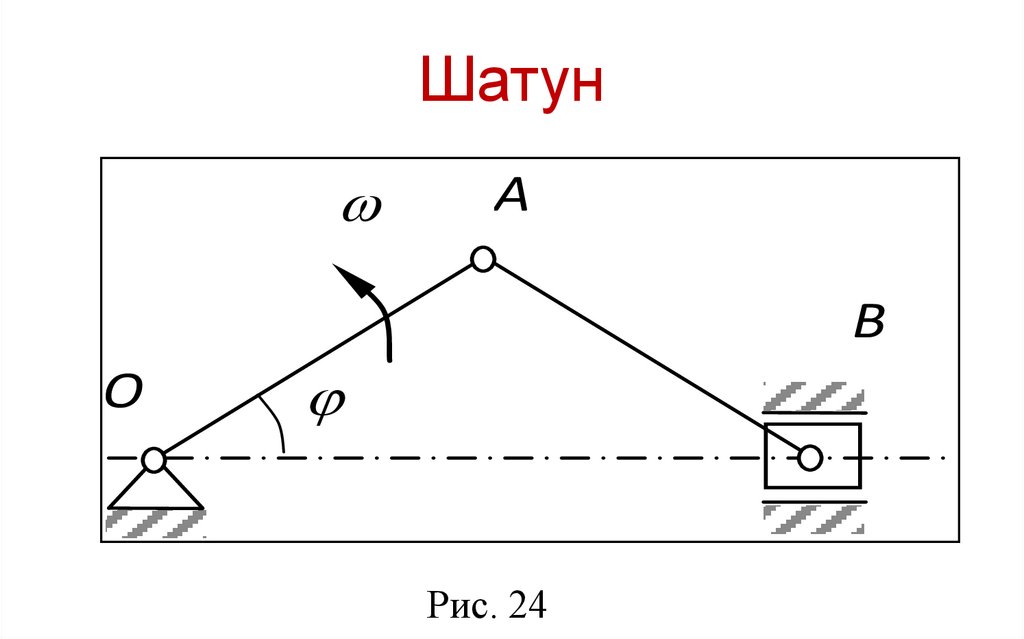
ШатунА
В
О
Рис. 24
4.
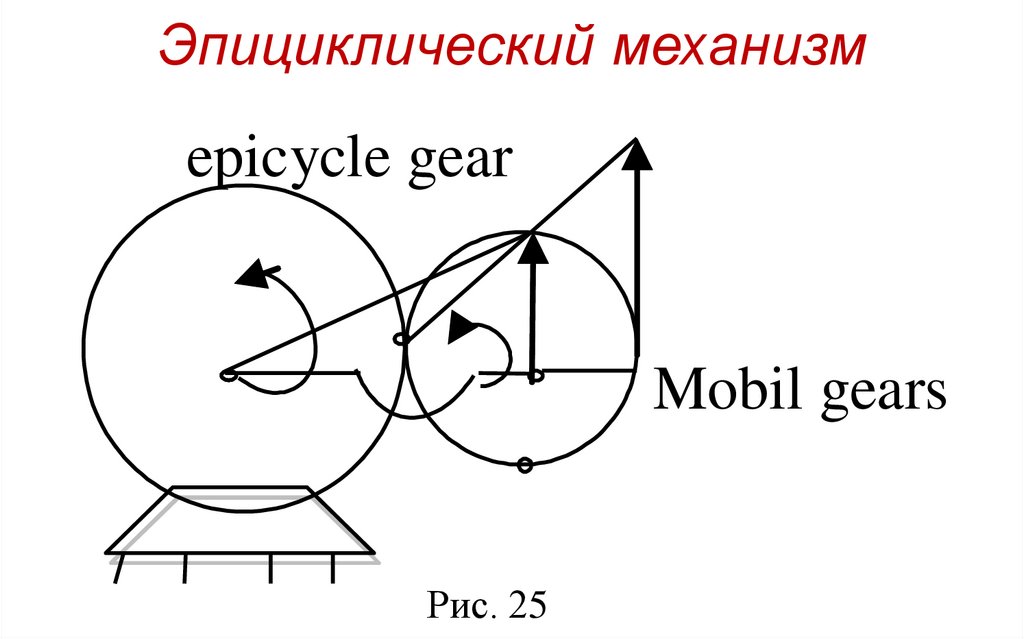
Эпициклический механизмepicycle gear
Mobil gears
Рис. 25
5.
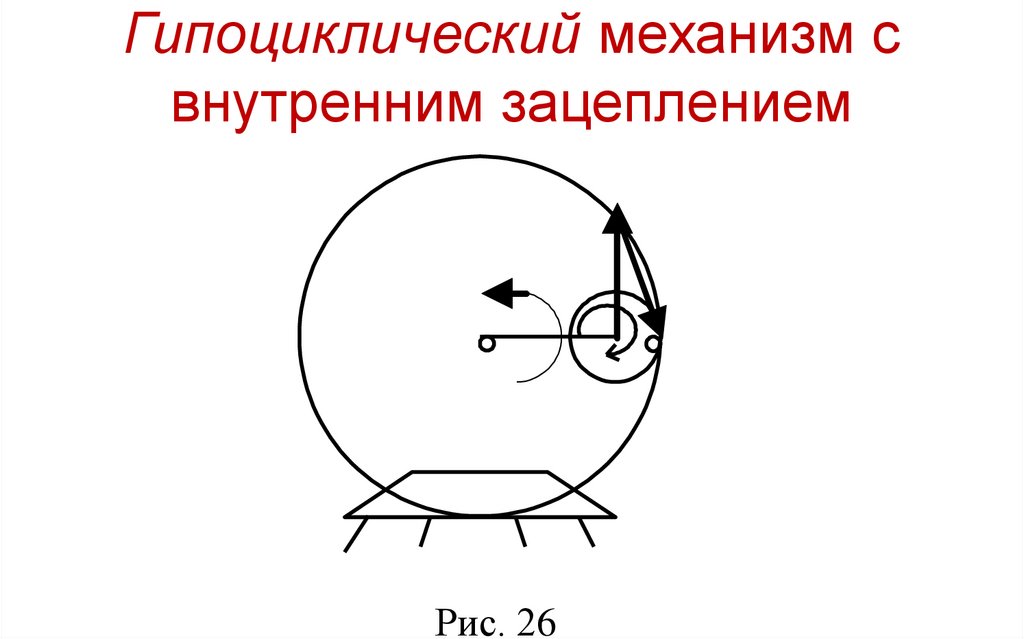
Гипоциклический механизм свнутренним зацеплением
Рис. 26
6.
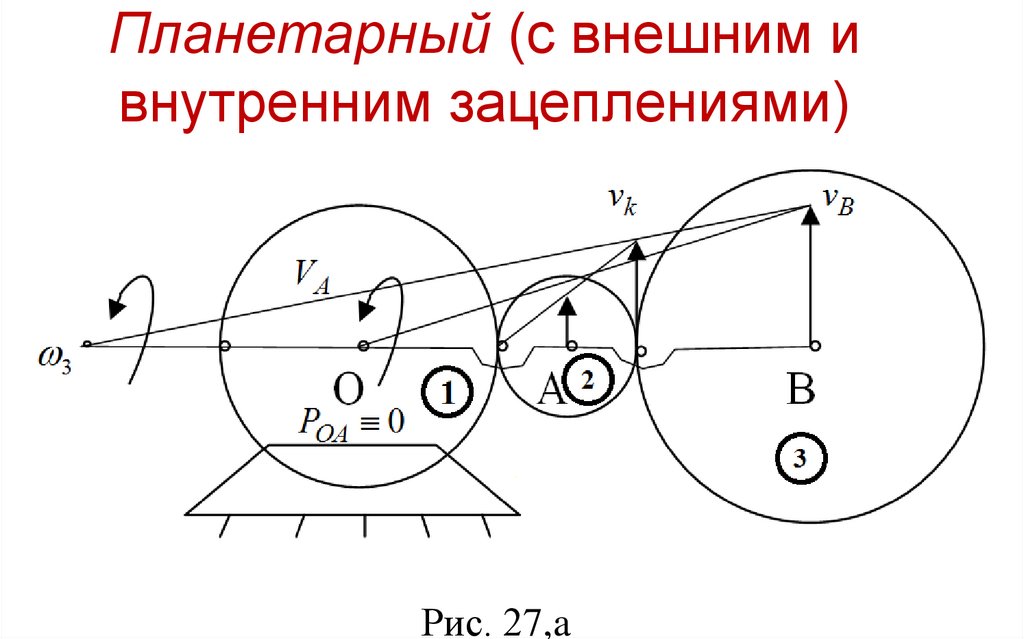
Планетарный (с внешним ивнутренним зацеплениями)
Рис. 27,a
7.
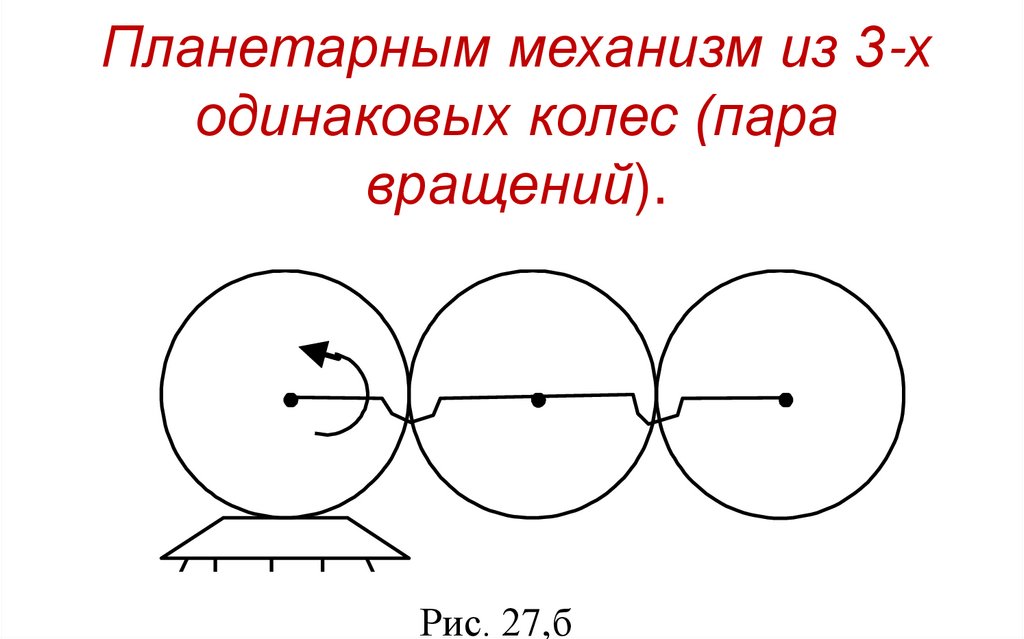
Планетарным механизм из 3-ходинаковых колес (пара
вращений).
Рис. 27,б
8.
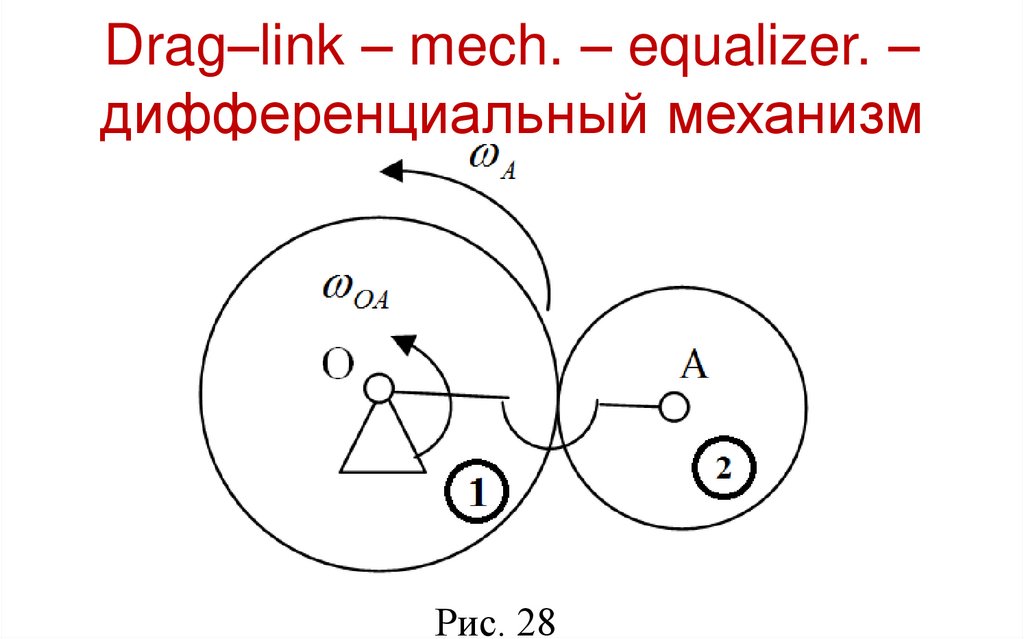
Drag–link – mech. – equalizer. –дифференциальный механизм
Рис. 28
9.
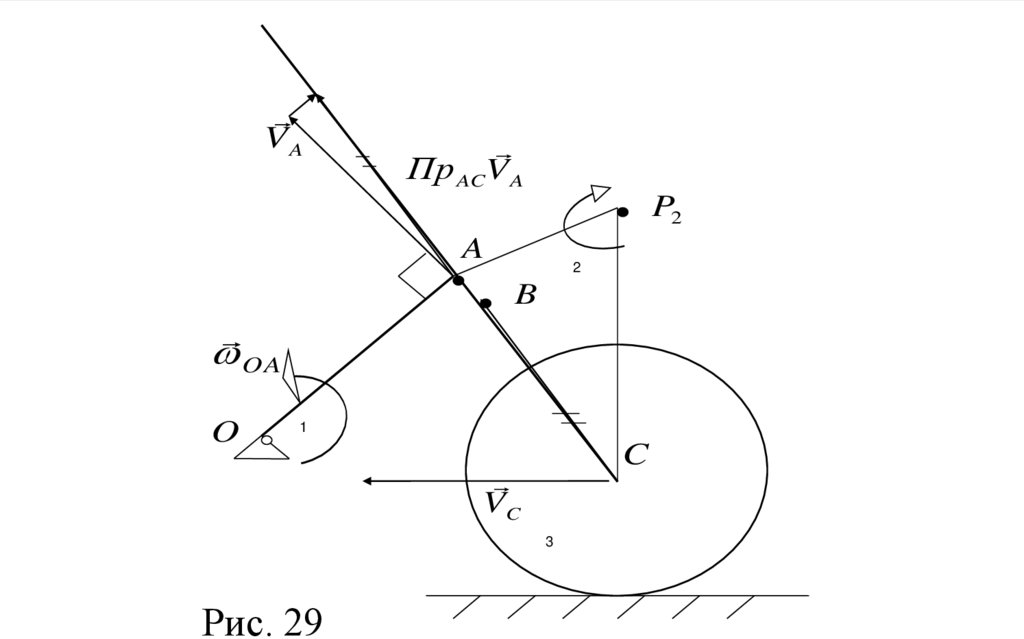
VAПр ACV A
P2
A
2
B
OA
O
1
C
VC
3
Рис. 29
10.
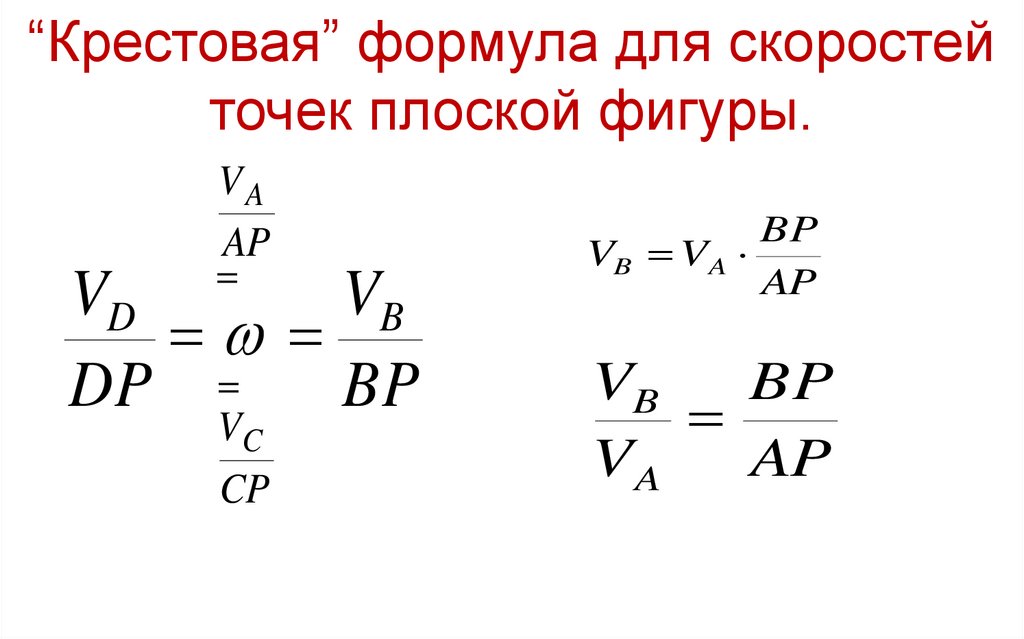
“Крестовая” формула для скоростейточек плоской фигуры.
VA
AP
BP
VB VA
AP
VC
CP
VB
BP
VA
AP
VD
VB
DP
BP
11.
§6.2. Понятие о центроидах.Введем понятие о центроидах. Оно активно используется в курсе ТММ
при решении задач, связанных с анализом и синтезом эквивалентных
механизмов. Дадим определения:
Геометрическое место точек МЦС в подвижной
плоскости называется подвижной центроидой.
Геометрическое место точек МЦП в неподвижной
плоскости называется неподвижной центроидой.
В данной лекции ограничимся только определениями, формулировкой
одной теоремы и одним примером. Доказательство теоремы и другие
примеры законспектируете из учебника (см. календарный план).
Теорема: Плоское движение твердого тела можно
представить как качение без проскальзывания подвижной
центроиды по неподвижной.
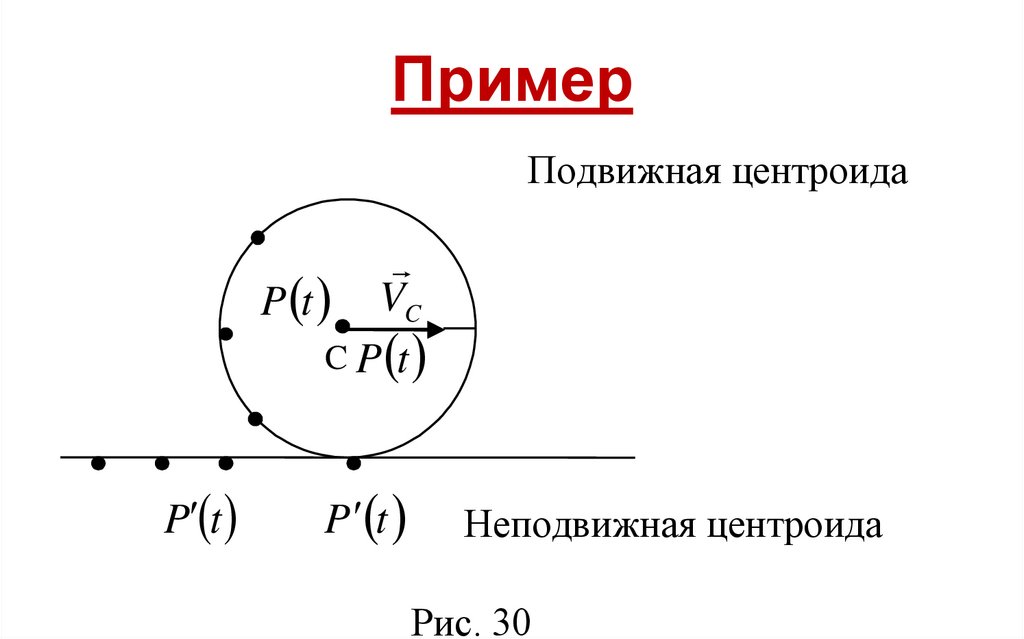
12.
ПримерПодвижная центроида
P t VC
C P t
P t
P t
Неподвижная центроида
Рис. 30