




















 physics
physicsSimilar presentations:
")


")
")


 = поступательное + вращательное")

")
Плоское движение твердого тела
1. Плоское движение твердого тела
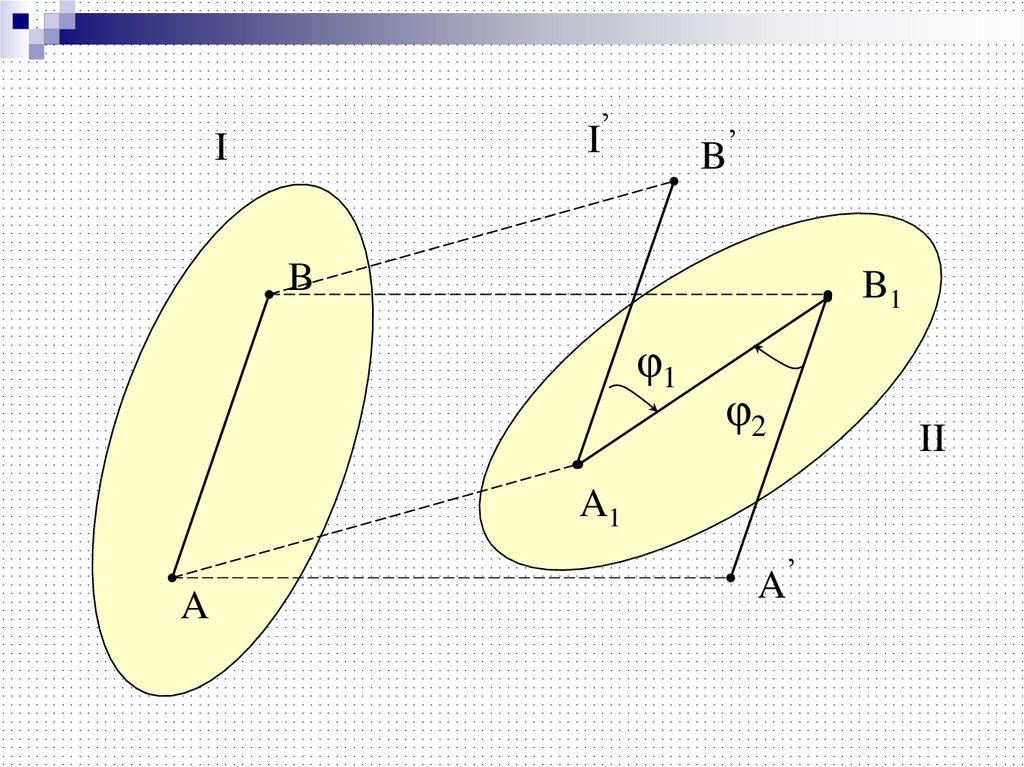
2. Плоским или плоскопараллельным движением твердого тела называется такое движение, при котором каждая точка тела движется в
плоскости,параллельной некоторой неподвижной
плоскости.
3.
I’I
B’
B
B1
φ1
φ2
A1
A
A’
II
4.
Всякое непоступательное перемещениеплоской фигуры в ее плоскости можно
рассматривать как совокупность двух
перемещений: поступательного
перемещения плоской фигуры вместе с
произвольной точкой, называемой
полюсом, и поворотом вокруг полюса.
5. Теорема о скоростях точек плоской фигуры
Скорость любой точки плоскойфигуры равна геометрической
сумме скорости полюса и скорости
этой точки в ее вращении вместе с
плоской фигурой вокруг полюса.
6.
vAvOA
A
rOA
vO
ω
ρA
O
vO
ρO
O1
7.
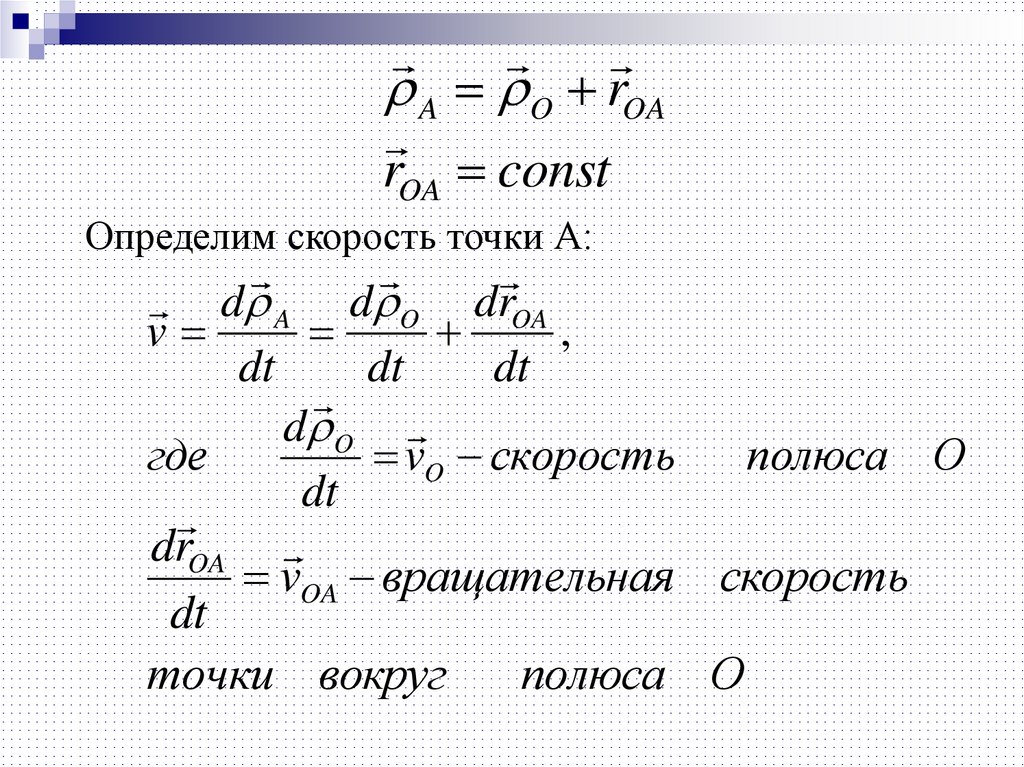
A O rOArOA const
Определим скорость точки А:
d A d O drOA
v
,
dt
dt
dt
d O
где
vO скорость
полюса О
dt
drOA
vOA вращательная скорость
dt
точки вокруг
полюса О
8.
vOA rOAВращательная скорость направлена
перпендикулярно отрезку ОА, в сторону вращения
фигуры, и имеет модуль:
vOA OA
Т.о., получаем
v A vO vOA vO rOA
(1)
9. Мгновенный центр скоростей
В каждый момент временисуществует точка, неизменно
связанная с плоской фигурой,
скорость которой в данный момент
времени равна нулю. Эту точку
называют мгновенный центр
скоростей (МЦС).
10. Определение скоростей точек плоской фигуры с помощью МЦС
МЦС плоской фигуры находится наперпендикуляре к направлению
скорости.
Примем МЦС за полюс и определим
скорость точки А.
11.
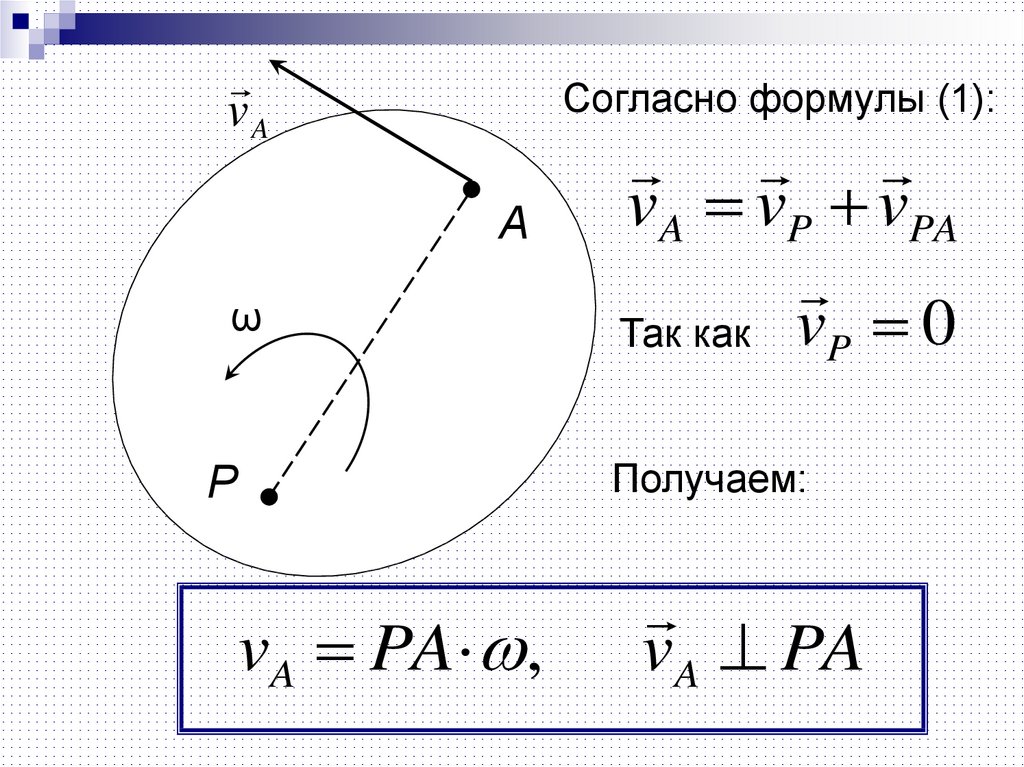
vAСогласно формулы (1):
А
ω
vA vP vPA
Так как vP 0
Получаем:
Р
vA PA ,
vA PA
12.
Скорость любой точки плоской фигуры вкаждый момент времени имеет модуль,
равный произведению угловой скорости
фигуры на длину отрезка, соединяющего
точку с МЦС, и направлена
перпендикулярно этому отрезку в
сторону вращения фигуры.
13. Различные случаи определения положения МЦС
МЦС фигурыопределяется как
точка пересечения
перпендикуляров к
этим прямым,
восстановленных в
точках А и В.
В
А
vA
vB
ω
Р
vA / PA
vB PB
14.
АvA
В
vB
ω
Р
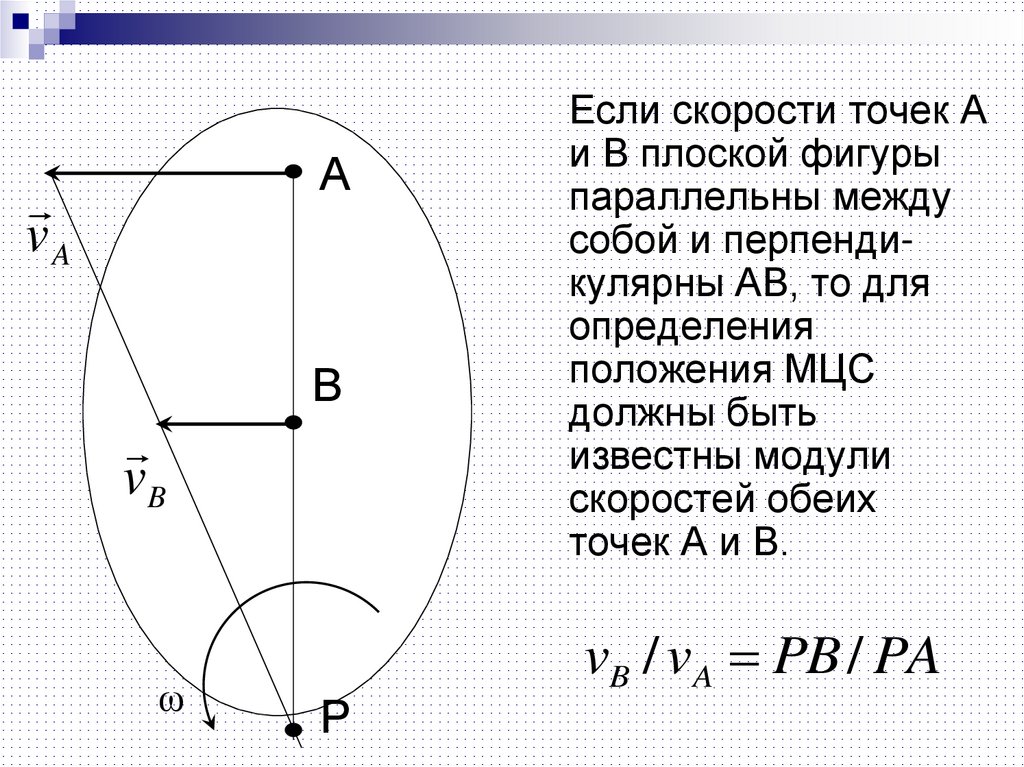
Если скорости точек А
и В плоской фигуры
параллельны между
собой и перпендикулярны АВ, то для
определения
положения МЦС
должны быть
известны модули
скоростей обеих
точек А и В.
vB / vA PB / PA
15.
vAvB
А
В
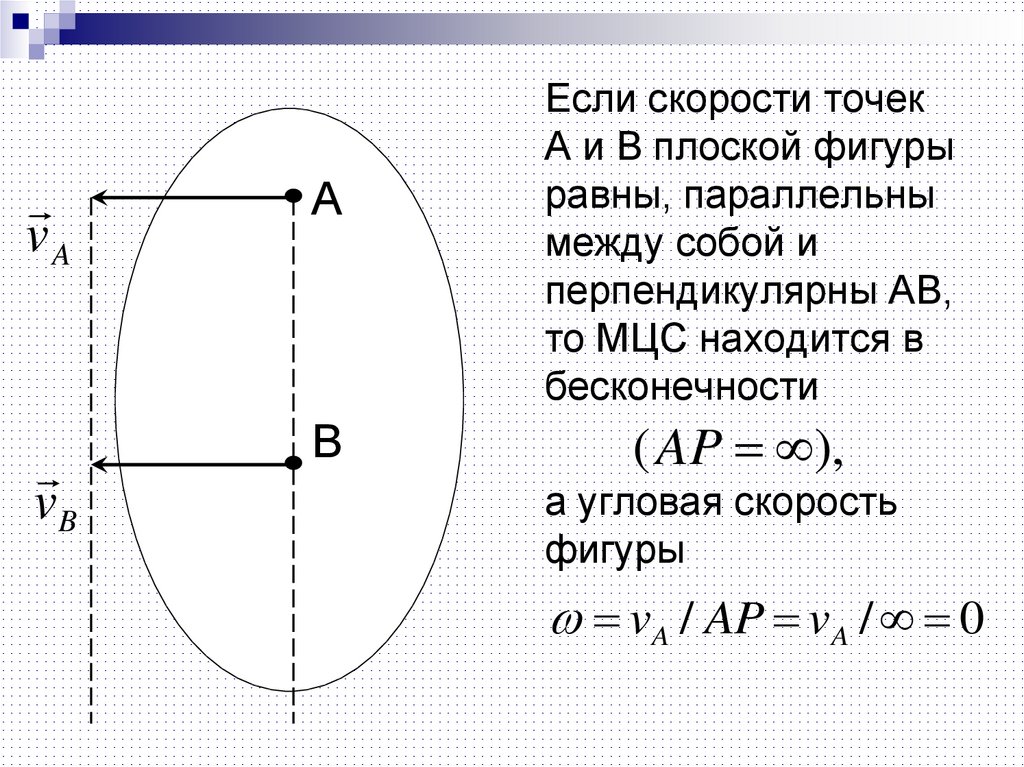
Если скорости точек
А и В плоской фигуры
равны, параллельны
между собой и
перпендикулярны АВ,
то МЦС находится в
бесконечности
( AP ),
а угловая скорость
фигуры
vA / AP vA / 0
16.
АvA
vB
vC
В
С
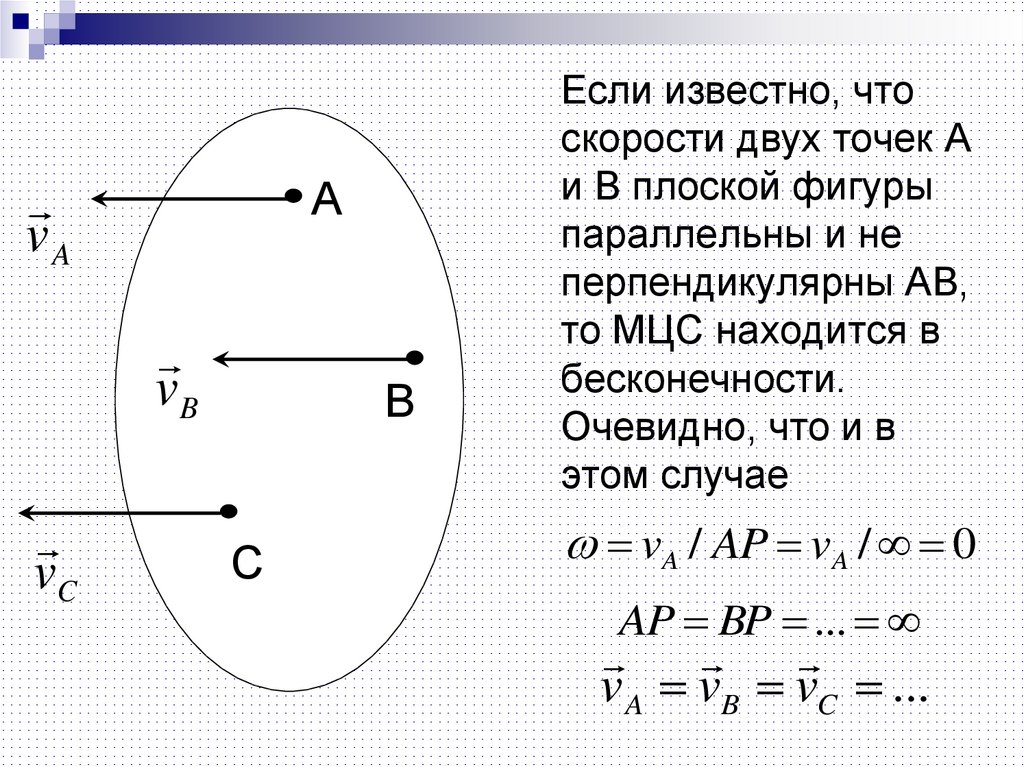
Если известно, что
скорости двух точек А
и В плоской фигуры
параллельны и не
перпендикулярны АВ,
то МЦС находится в
бесконечности.
Очевидно, что и в
этом случае
vA / AP vA / 0
AP BP ...
v A vB vC ...
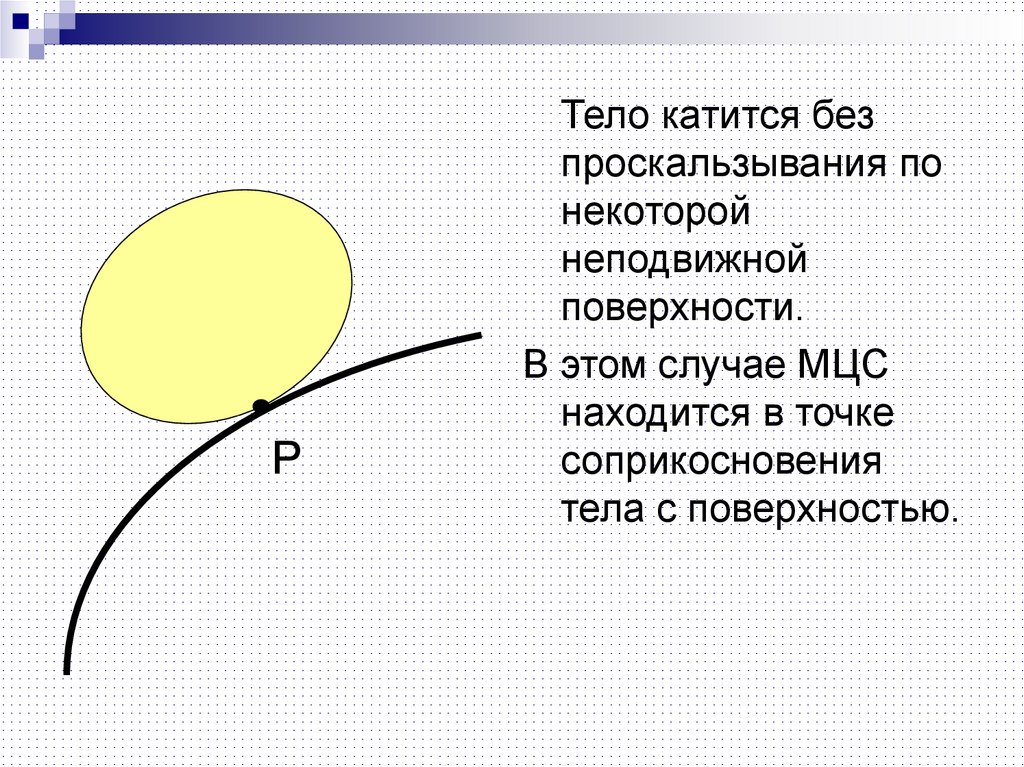
17.
РТело катится без
проскальзывания по
некоторой
неподвижной
поверхности.
В этом случае МЦС
находится в точке
соприкосновения
тела с поверхностью.
18. Теорема об ускорениях точек плоской фигуры
Ускорение любой точки плоской фигурыравно геометрической сумме
ускорения полюса и ускорения этой
точки в ее вращении вместе с плоской
фигурой вокруг полюса.
19.
Определим ускорение точки А, принявточку О за полюс
WA
W0
O
ρo
O1
WOA
WOA
ε
rOA
W0
A
WOA
ω
ρA
20.
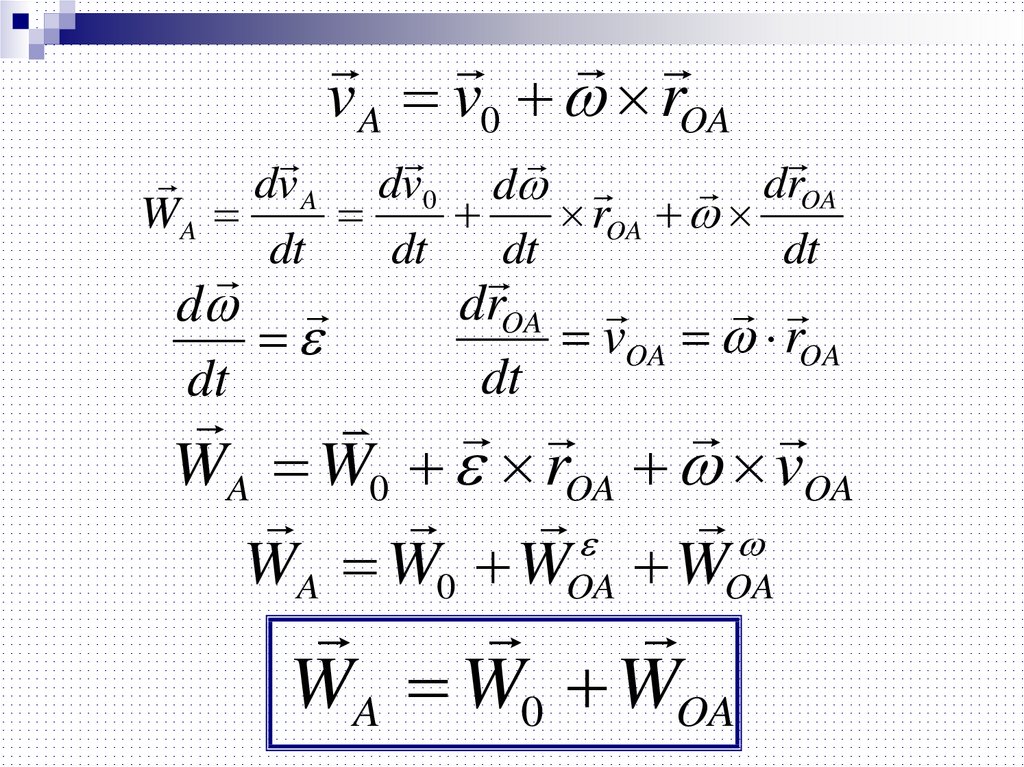
v A v0 rOAdv A dv0 d
drOA
WA
rOA
dt
dt
dt
dt
d
dt
drOA
vOA rOA
dt
WA W0 rOA vOA
WA W0 WOA WOA
WA W0 WOA
21.
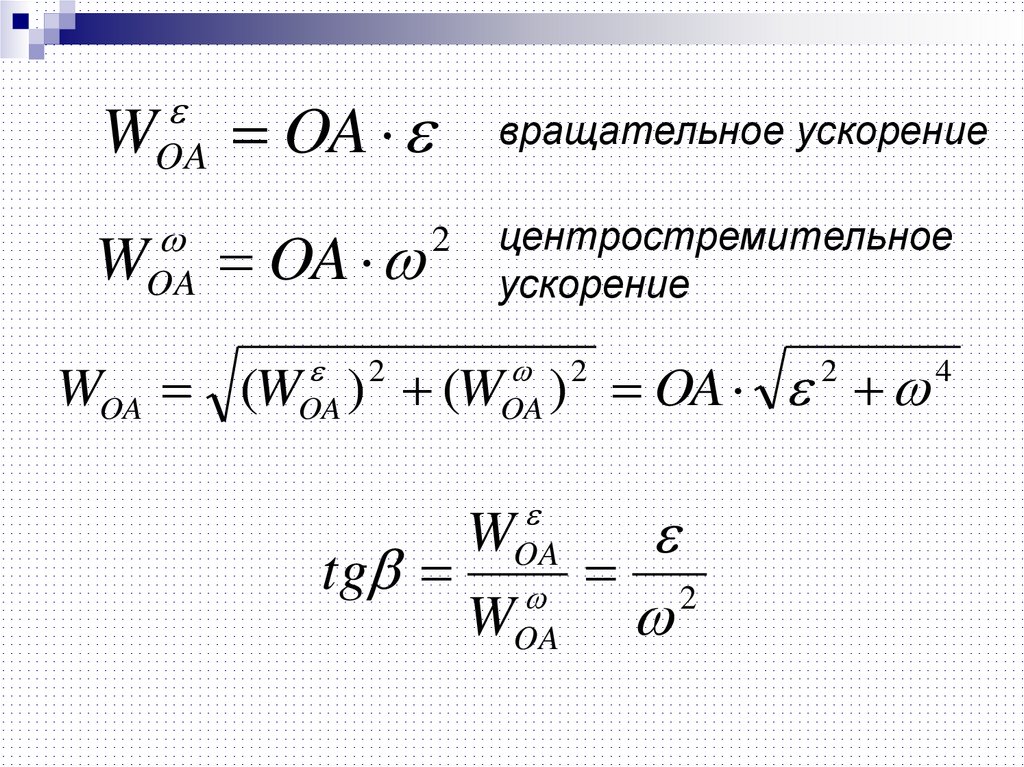
WOA OAWOA OA
2
вращательное ускорение
центростремительное
ускорение
WOA (WOA ) (WOA ) OA
2
2
WOA
tg 2
WOA
2
4
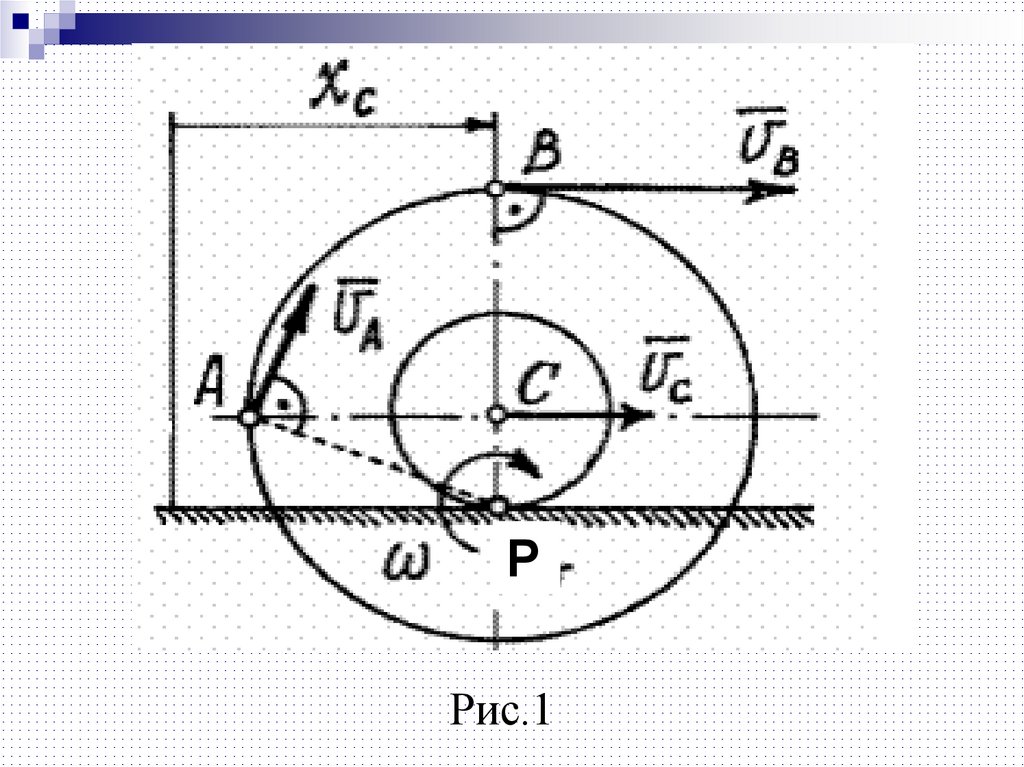
22. Пример 1
Пример 1Тело,
имеющее форму катушки,
катится своим средним цилиндром
по неподвижной плоскости так,
что хс=3t (см).
Радиусы
цилиндров:
R = 4 см и r = 2 см (рис.1).
23.
РРис.1
24. Решение.
Определим скорости точек А,В иС.
Мгновенный центр скоростей
находится в точке касания катушки
с плоскостью.
Скорость полюса С
vC x C 3cм / с
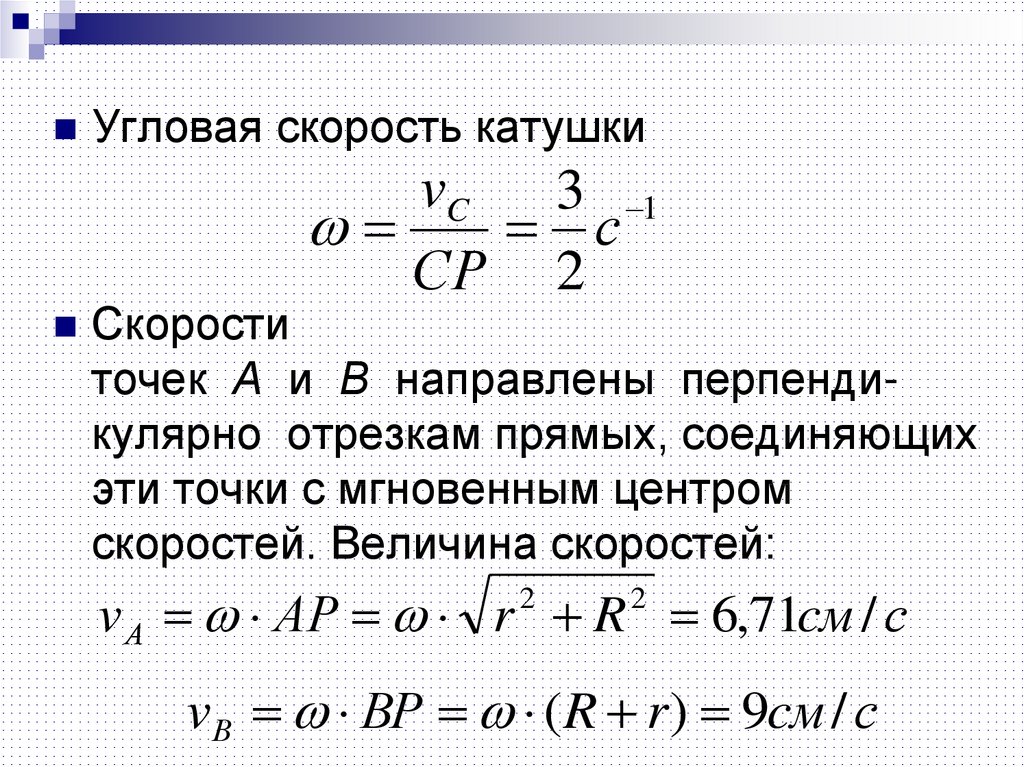
25.
Угловая скорость катушкиvC
3 1
с
СР 2
Скорости
точек А и В направлены перпендикулярно отрезкам прямых, соединяющих
эти точки с мгновенным центром
скоростей. Величина скоростей:
v А АР r R 6,71cм / с
2
2
vВ ВР ( R r ) 9cм / с
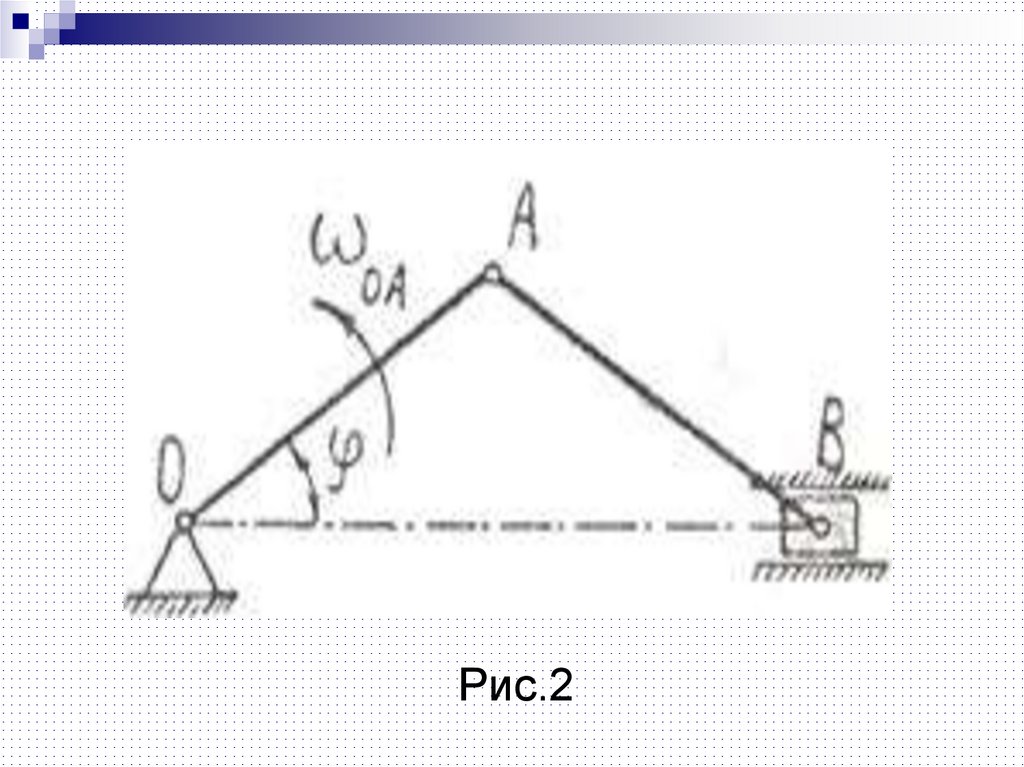
26. Пример 2
Найти угловую скоростьшатуна АВ и скорости точек В и С
кривошипно-шатунного механизма
(рис.2). Дана угловая скорость
кривошипа OA и размеры:
ωОА = 2 с-1,
OA = АВ = 0,36 м, 60
27.
Рис.228. Решение
Кривошип OA совершает вращательноедвижение,
Шатун АВ - плоскопараллельное
движение
Находим скорость точки А звена OA
v А ОА ОА 2 0,36 0,72cм / с,
v A OA
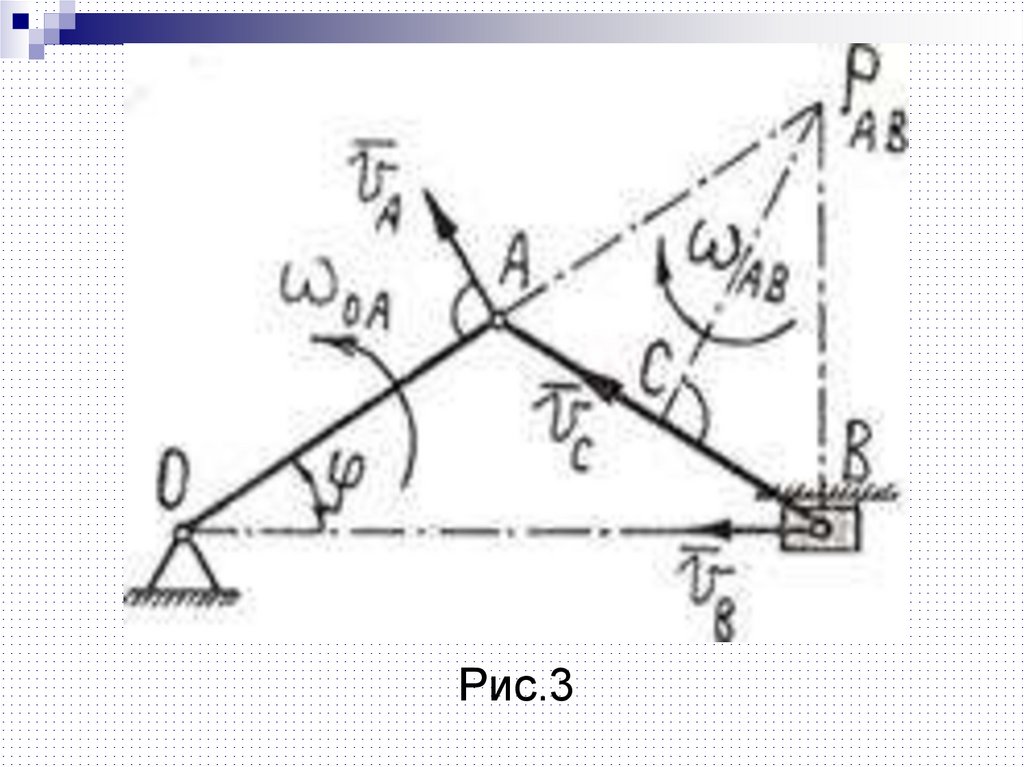
29.
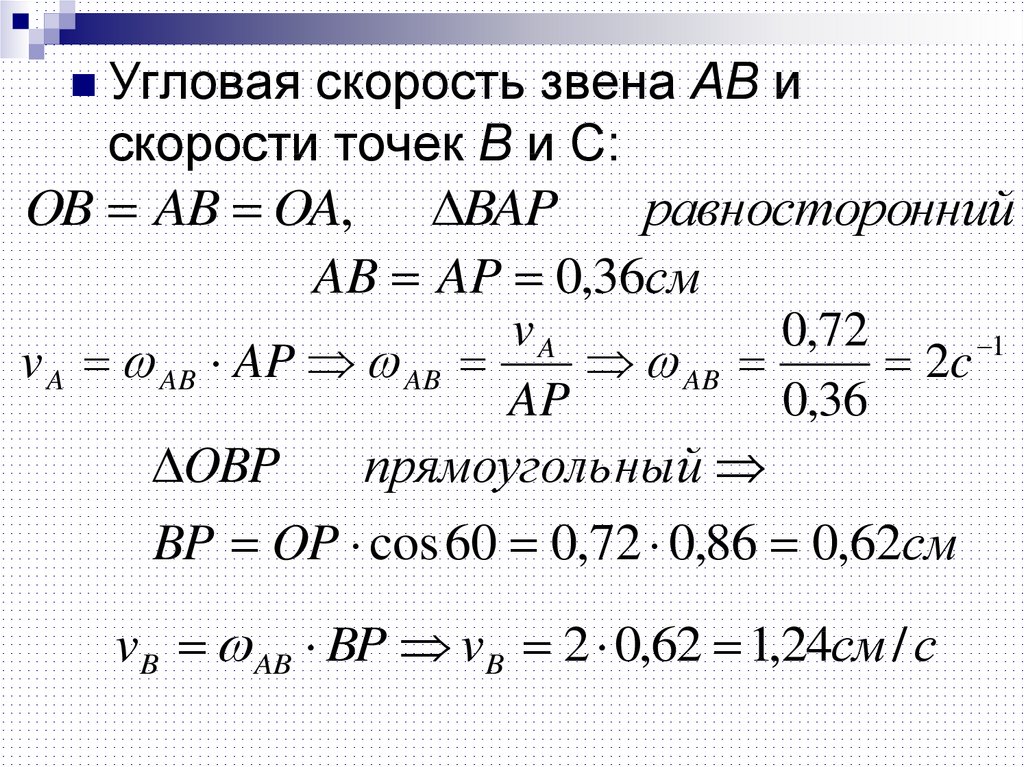
Рис.330.
Угловаяскорость звена АВ и
скорости точек В и С:
OB AB OA, BAP
равносторонний
AB AP 0,36см
vA
0,72
1
v A AB AP AB
AB
2c
AP
0,36
OBP
прямоуголь ный
BP OP cos 60 0,72 0,86 0,62см
vB AB BP vB 2 0,62 1,24см / с
31. Алгоритм определение ускорения
Ускорение любой точки плоской фигуры вданный момент времени можно найти, если
известны:
векторы скорости и ускорения какойнибудь точки А этой фигуры в данный
момент;
положение мгновенного центра скоростей.
32. План решения
Находим мгновенный центр скоростей,восстанавливая перпендикуляры к
скоростям двух точек плоской фигуры.
Определяем мгновенную угловую скорость
фигуры.
Определяем центростремительное
ускорение точки вокруг полюса, приравнивая
нулю сумму проекций всех слагаемых
ускорений на ось, перпендикулярную к
известному направлению ускорения.
33.
Находим модуль вращательногоускорения, приравнивая нулю сумму
проекций всех слагаемых ускорений на
ось, перпендикулярную к известному
направлению ускорения.
Определяем мгновенное угловое
ускорение плоской фигуры по
найденному вращательному ускорению.
Находим ускорение точки плоской
фигуры при помощи формулы
распределения ускорений.
34. Пример 3
Исследовать работу плоскогомеханизма и для заданного положения
его звеньев и точек определить их
кинематические характеристики, если
угловая скорость и угловое ускорение
кривошипа ОА соответственно равны :
35.
1. Угловую скорость тела АВ;2. Скорость точки В;
3. Нормальное и касательное ускорения
точки В при вращении вокруг точки А;
4. Угловое ускорение тела AB;
5. Ускорение точки B.
36.
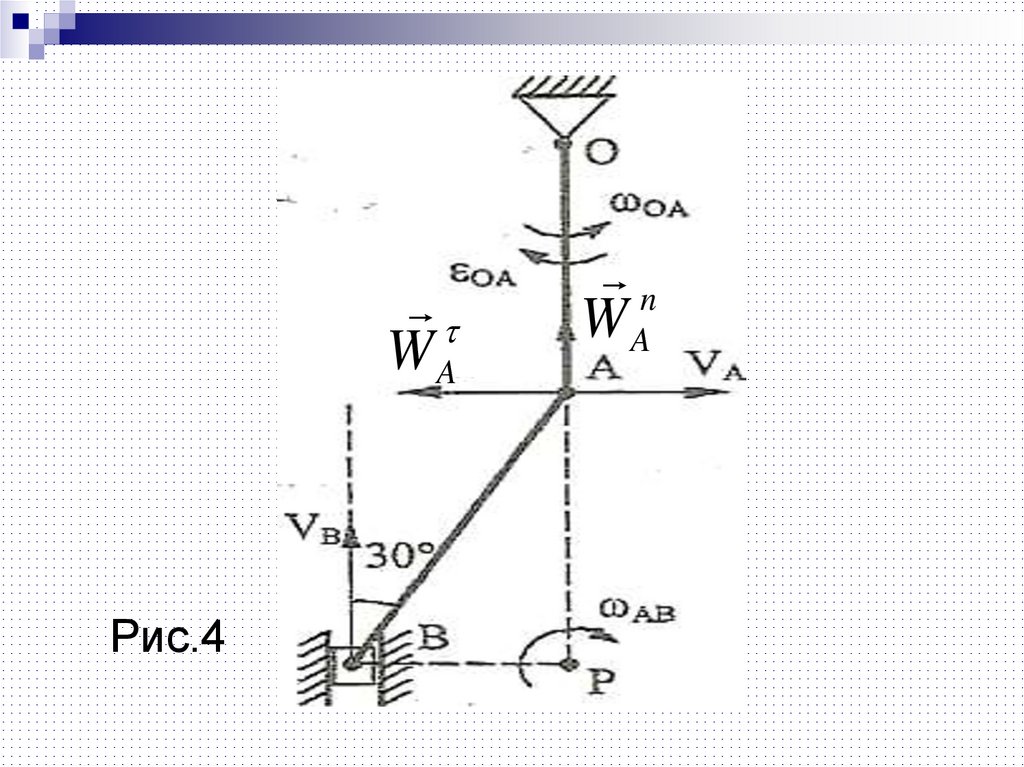
Дано: схема механизма в заданномположении (рис.4);
ОА=10 см,
АВ=60 см,
Найти для заданного механизма скорость
и ускорение точки В.
37.
WAРис.4
n
WA
38. Решение.
1.Точка А полюс. Скорость точки А:
v A OA OA 15см / с
Ускорение точки А: (Рис.4)
WA WOA WOA n
W OA OA 22,5см / с
n
A
2
2
W A OA OA 20см / с
2
39.
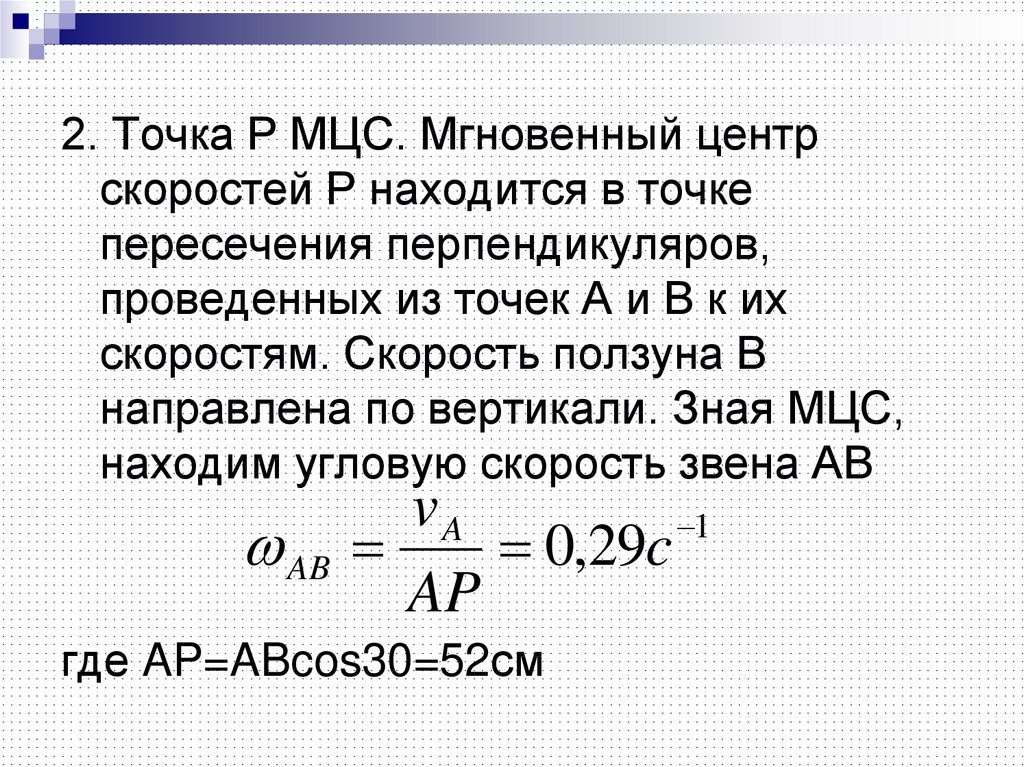
2. Точка Р МЦС. Мгновенный центрскоростей Р находится в точке
пересечения перпендикуляров,
проведенных из точек А и В к их
скоростям. Скорость ползуна В
направлена по вертикали. Зная МЦС,
находим угловую скорость звена АВ
AB
vA
1
0,29c
AP
где AP=ABcos30=52см
40.
+3. Скорость точки B.
vB AB BP 8,7см / с
где BP=AB
4. Ускорение точки B.
n
WB WA WAB n WAB
n
n
WA n WA WAB n WAB
n
где WAB
AB AB 5см / с
(3.1)
41.
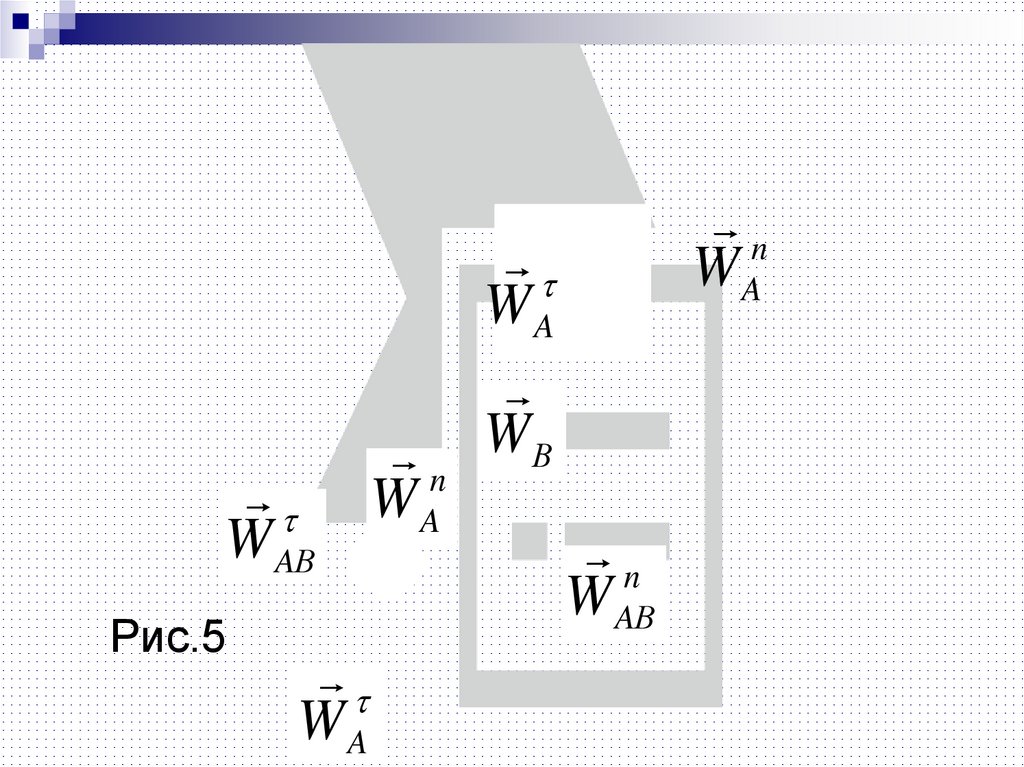
W AВРис.5
WA
n
WA
n
WA
WA
WВ
n
W AВ
42.
Вектор центростремительного ускорениянаправлен от В к А.
Вектор ускорения точки В направлен по
вертикали вдоль направляющих ползуна.
Вектор вращательного ускорения направлен
перпендикулярно АВ. (рис. 5).
Определим эти ускорения, спроецировав
векторное равенство (3.1) на направление
АВ:
WВ cos 30 W cos 30 W
n
A
отсюда
n
AB
WВ 16,7см / с
2
WA cos 60
43.
Проецируя равенство (3.1) нанаправление перпендикулярное AB,
имеем
WВ cos 60 WA cos 30 W cos 60 WAB
Отсюда
n
A
WAB 20,2см / с
Направление W AB противоположно
показанному на рис. 5
2
44.
Угловое ускорение находим поформуле
W AB
2
AB
0,34c
AB
Направление ускорения W AB
относительно полюса А определяет
направление углового ускорения AB