
 = поступательное + вращательное")






:")
:")
 physics
physicsSimilar presentations:
")
")





")
")

Плоскопараллельное движение твердого тела (плоское) = поступательное + вращательное
1.
2. Частный случай сложного движения ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА (ПЛОСКОЕ) = поступательное + вращательное
Плоскопараллельным (плоским)движением твердого тела называется
такое движение, при котором все точки
тела движутся в плоскостях, параллельных
одной неподвижной плоскости, которая
называется основной плоскостью.
3.
Общий случай плоскопараллельного движенияy
О
x
4.
5.
В теории плоское движениерассматривают как мгновенно
вращательное произвольной точки
(т.е. точки параметры которой
неизвестны)
вокруг движущейся точки –
ПОЛЮСА (т.е. точки параметры
которой известны)
6.
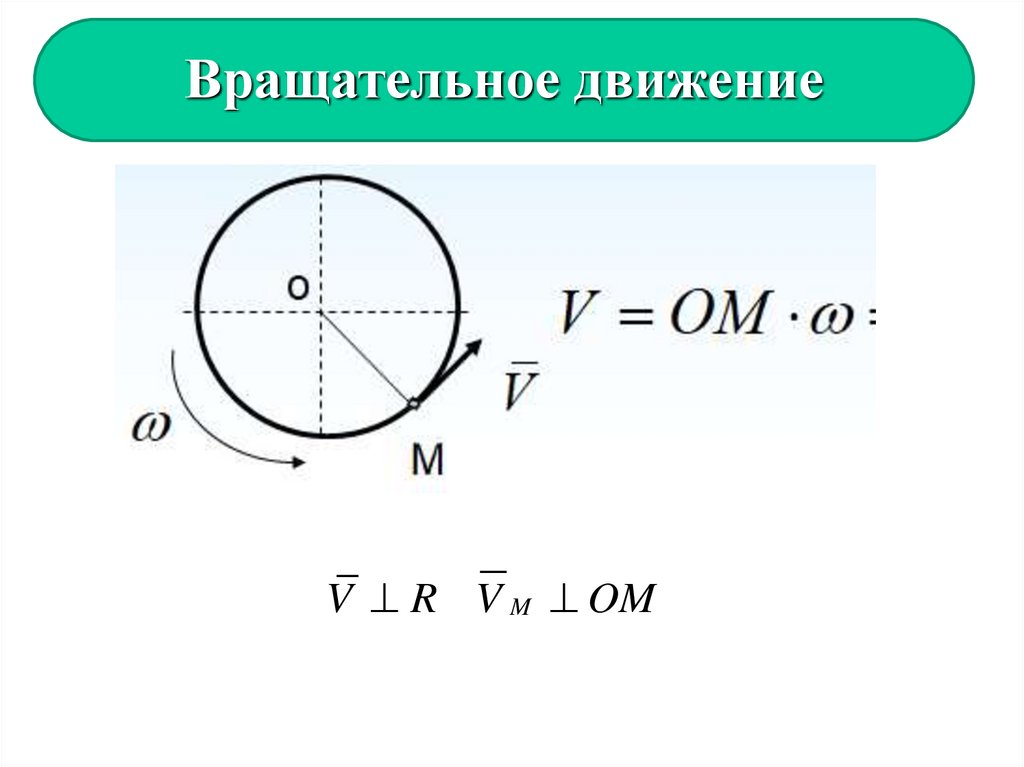
Вращательное движениеV R V M OM
7. Скорость произвольной точки плоской фигуры равна геометрической сумме скорости полюса и вращательной скорости этой точки вокруг
ВЕКТОРНАЯ ТЕОРЕМАо скоростях точек тела в плоскопараллельном
движении
VB VA VBA
Скорость произвольной точки плоской
фигуры равна геометрической сумме
скорости полюса и вращательной
скорости этой точки вокруг оси,
проходящей через полюс .
8. Геометрическая интерпретация теоремы
VBAВ
VA
VB
VB VA VBA
VBA AB
ω
VA
А
9.
В теории плоское движениерассматривают как мгновенно
вращательное произвольной точки
(т.е. точки параметры которой
неизвестны)
вокруг движущейся точки –
ПОЛЮСА (т.е. точки параметры
которой известны)
10.
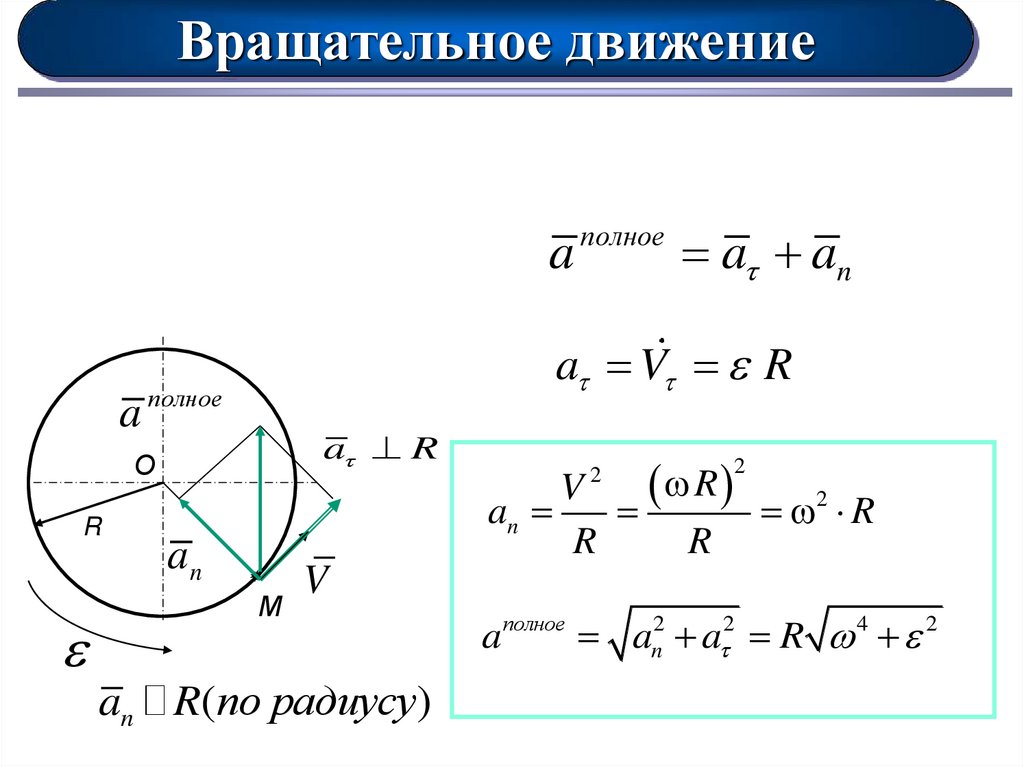
Вращательное движениеa
a
a an
a V R
полное
a R
О
R
полное
an
М
R
V
an
2 R
R
R
2
2
V
an R(по радиусу)
aполное an2 a 2 R 4 2
11. Теорема о сложении ускорений точек при плоскопараллельном движении тела
в( )ц ( n)
aB aA aBA aВА
Ускорение произвольной точки тела
при его плоскопараллельном движении равно
векторной сумме ускорения полюса, вращательного
и центростремительного ускорений этой точки
при вращении вокруг полюса.
в( )
BA
aBА a
( вр )
aВА АВ
a
ц(n)
ВА
n (цен)
ВА
a
AB
2
12.
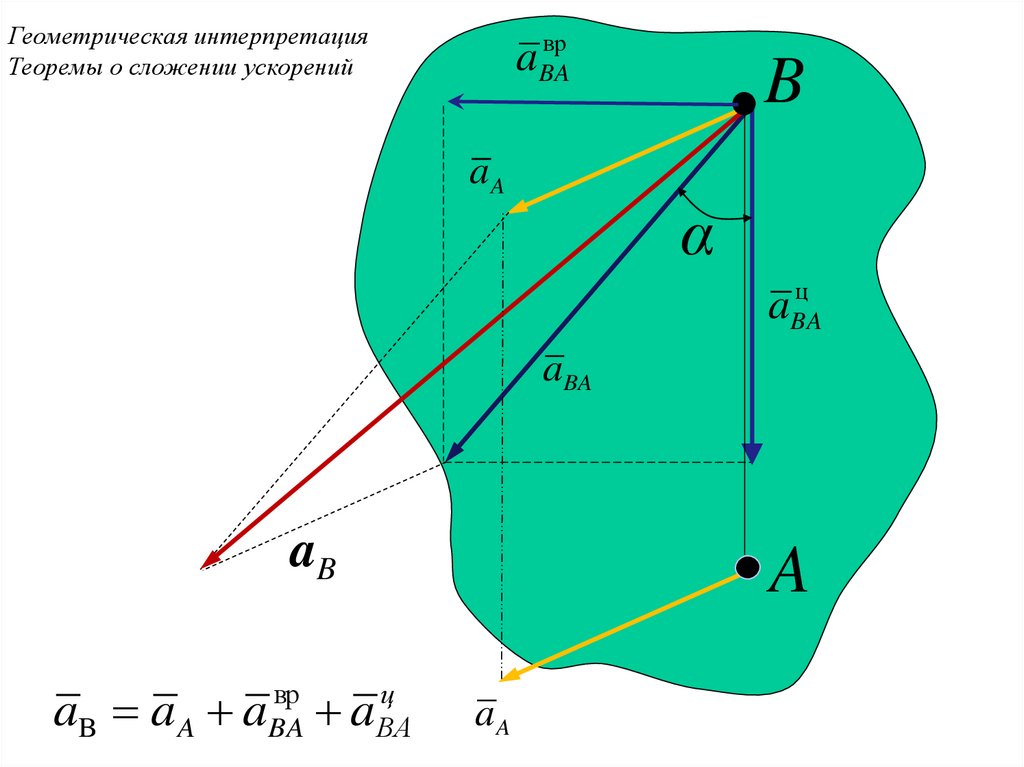
Геометрическая интерпретацияТеоремы о сложении ускорений
вр
aBA
aA
B
α
a
ц
BA
aBA
aB
aB a A a a
вр
BA
A
ц
ВА
aA
13.
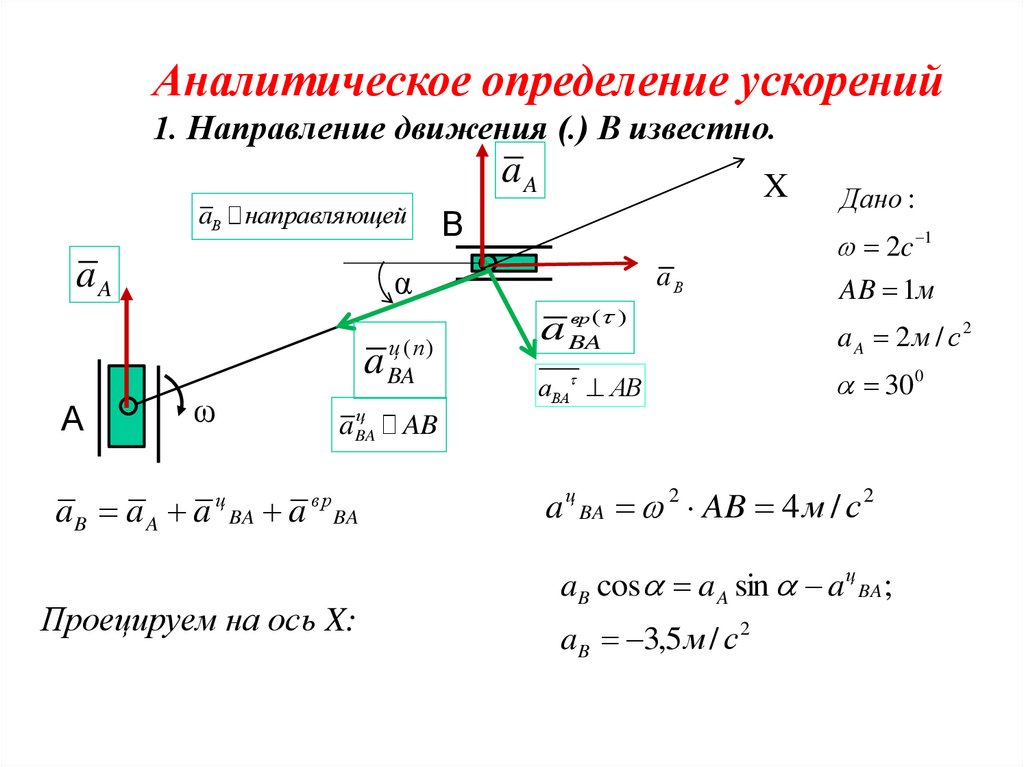
Аналитическое определение ускорений1. Направление движения (.) В известно.
aA
aВ направляющей
aA
α
ц (n)
a BA
А
ω
ц
a BA
AB
aB a A a ц BA a вр BA
Проецируем на ось X:
X
В
Дано :
2c 1
aВ
AB 1м
вр ( )
a BA
aA 2 м / с2
аВА АВ
300
a ц BA 2 AB 4 м / с 2
aB cos a A sin a ц BA ;
aB 3,5 м / с 2
14.
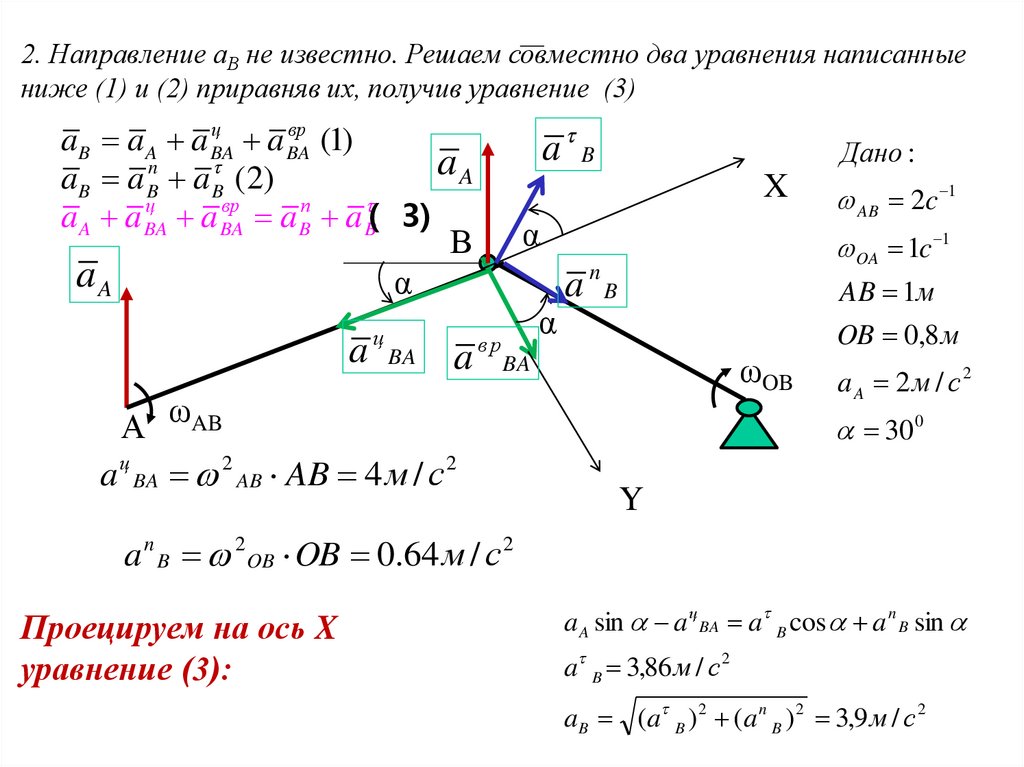
2. Направление аВ не известно. Решаем совместно два уравнения написанныениже (1) и (2) приравняв их, получив уравнение (3)
ц
вр
aB a A a BA
a BA
(1)
aA
aB a Bn a B (2)
ц
вр
a A a BA
a BA
a Bn a B( 3)
В
aA
α
a
ц
BA
a
a B
Дано :
X
α
вр
α
OA 1c 1
a nB
AB 1м
OB 0,8 м
ωOB
BA
А ωAB
a ц BA 2 AB AB 4 м / с 2
AB 2c 1
aA 2 м / с2
300
Y
a n B 2 OB OB 0.64 м / с 2
Проецируем на ось X
уравнение (3):
a A sin a ц BA a B cos a n B sin
a B 3,86 м / с 2
aB (a B ) 2 (a n B ) 2 3,9 м / с 2
15.
3. Движение диска без скольжения.вр
ц ( n)
aB aA aBA
aВА
Дано: R = 0,5M
ω = 2c-1 ; a = 4M/c2
A
Y
Найти: a
B
aвр
BA
a (ц)
A aA
BA
d
dt
d (VA )
dt R
a A
R
B
X aoц = ω2 R = 2м/с2
aвр = ԑ R = 4м/с2
BA
BA
ω
a = aA – aoц = 2м/с2
a = aвр = 4м/с2
BX
BY
P
a =√a2 + a2 =
B
BX
BY
BA
BA
√20 = 4,47м/c2
8м / с2
16. Кинематический анализ плоского механизма. Найти для заданного положения механизма скорости и ускорения точек А, В, С, а также
угловые скорости и угловые ускорения всех звеньев механизма.Дано : ОА 2с 1; OA 3c 1;
VB
В
ОА 0,5 м; r 0,3м; R 0,4 м; АС 1м; 600
Рк
1. Определение скоростей:
к
ОА вращательное движение
VA ОА OA 2 0,5 1м / с
VA А
Колесо плоскопарал. движение
к
OA
OA
VC
O
AC
РАС
VA
APк
VB
BPк
; к
VA
APк
VrA 3,3c 1
VB к BP к 0,09 0,16 1,65 м / с
AC плоскопара л. движение
С
АС
VA
APAC
CPVCAC
АС
VA
APAC
1
AC sin 600
1,15c 1
VC АС CP АС AC cos 600 0,57 м / с
17. Аналитическое определение ускорений (для точки А и В):
yОА вращательное движение
aA a n A a A
a в рBA
a n A 2 ОА OA 4 0,5 2 м / с 2
a
Вa
ц
a A
x
A
Колесо плоскопара л. движение
anA
aB a A a BA
OA
OA
O
OA 3 0,5 1,5 м / с 2
a A 4 2,25 2,5 м / с 2
А
BA
ОА
aC
С
к 3,3c 1 ; к
a A
r
5c 2
a ц BA 2 к R 1,32 м / с 2
a в р BA
к
R 2м / с2
aBX a ц BA a A 0,82
aBY a в р BA a n A 0
aB aBX 0,82 м / с 2
18. Определение ускорений (для точки С):
xAC плоскопара л. движение
aC a A a n A a ц CA a в рCA
a ц CA 2 АС AC 1,3
a A
На x : aC cos 300 a A cos 600 a n A cos 300 a ц CA
А
aC 0,35 м / с 2
anA
На y : aC cos 600 a A cos 300 a n A cos 600 a в рCA
OA
OA
O
y
a ц CA
a в рCA
a в рCA 2,48 AC AC
aC
С
AC 2,48c 2