")












:")
:")

 physics
physicsSimilar presentations:
")
 = поступательное + вращательное")

")




")
 движение точки")
§8. Плоскопараллельное движение твердого тела (плоское)
1. §8. Плоскопараллельное движение твердого тела (плоское)
Плоскопараллельным (плоским) движением твердого теланазывается такое движение, при котором все точки тела
движутся в плоскостях, параллельных одной неподвижной
плоскости, которая называется основной плоскостью.
2.
Общий случай плоскопараллельного движенияy
О
x
3.
4. Скорость произвольной точки плоской фигуры равна геометрической сумме скорости полюса и вращательной скорости этой точки вокруг оси, про
Теорема о скоростях точек тела приплоскопараллельном движении
VB VA VBA
Скорость произвольной точки плоской
фигуры равна геометрической сумме
скорости полюса и вращательной
скорости этой точки вокруг оси,
проходящей через полюс .
5. Геометрическая интерпретация теоремы
VBAВ
VA
VB
VB VA VBA
VBA AB
ω
VA
А
6. 8.5. Мгновенный центр скоростей
• Мгновенным центром скоростей(МЦС) называется точка связанная с
телом, скорость которой в данный
момент времени равна нулю.
7.
VAB
A
VB
VA VB VC
AP BP CP
P
Vс
Точка P – МЦС;
МЦС находится на пересечении перпендикуляров,
восстановленных к скоростям в 2х точках («А» и
«В»)
Плоскопараллельное движение можно рассматривать
как мгновенное вращение вокруг мгновенной оси
(ось, проходящая через МЦС).
8. Скорости двух точек тела параллельны друг другу, не равны между собой и перпендикулярны прямой соединяющей эти точки.
АVA
А
VA
Р
В
VB
В
VB
Р
9. Скорости двух точек параллельны, но не перпендикулярны прямой, соединяющей эти точки.
VAА
VAP 0
A
Движение тела поступательное
В
VB
Р в бесконечности
VA VB
10. Тело катится без скольжения по неподвижной поверхности.
VAA
O
ω
υO
P
υp = 0
11.
Пример 1VA
A
P
ωAB
VC
C
O
ωOA
B
ωAB = 0
VB
A
(.) P в ∞ мгн.пост. дв.
ωOA
A
O
VA
C
ωOA
O
VA
C
VC
VC
B
B
VB
ωAB (.)P в (.)В
11
VB
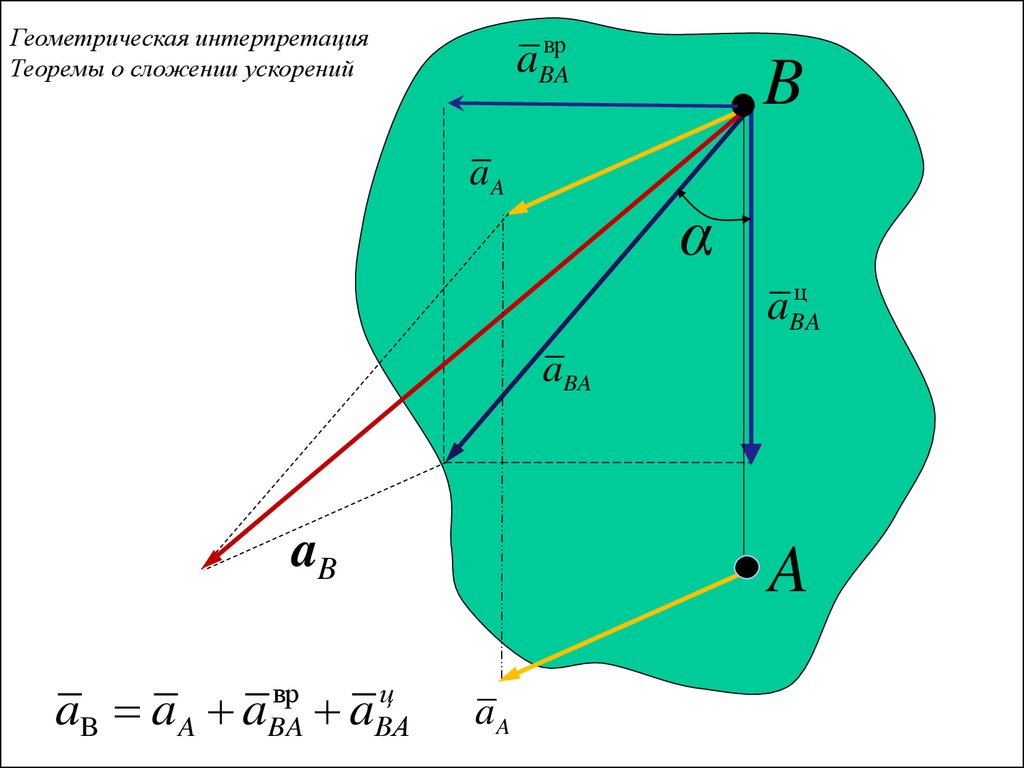
12. Теорема о сложении ускорений точек при плоскопараллельном движении тела
вц
B
A
BA
ВА
a a a a
Ускорение произвольной точки тела
при его плоскопараллельном движении равно
векторной сумме ускорения полюса, вращательного
и центростремительного ускорений этой точки
при вращении вокруг полюса.
aBА a a
в
BA
a
в
ВА
АВ
ц
ВА
a
ц
ВА
AB
2
13.
Геометрическая интерпретацияТеоремы о сложении ускорений
вр
aBA
aA
B
α
a
ц
BA
aBA
aB
aB a A a a
вр
BA
A
ц
ВА
aA
14.
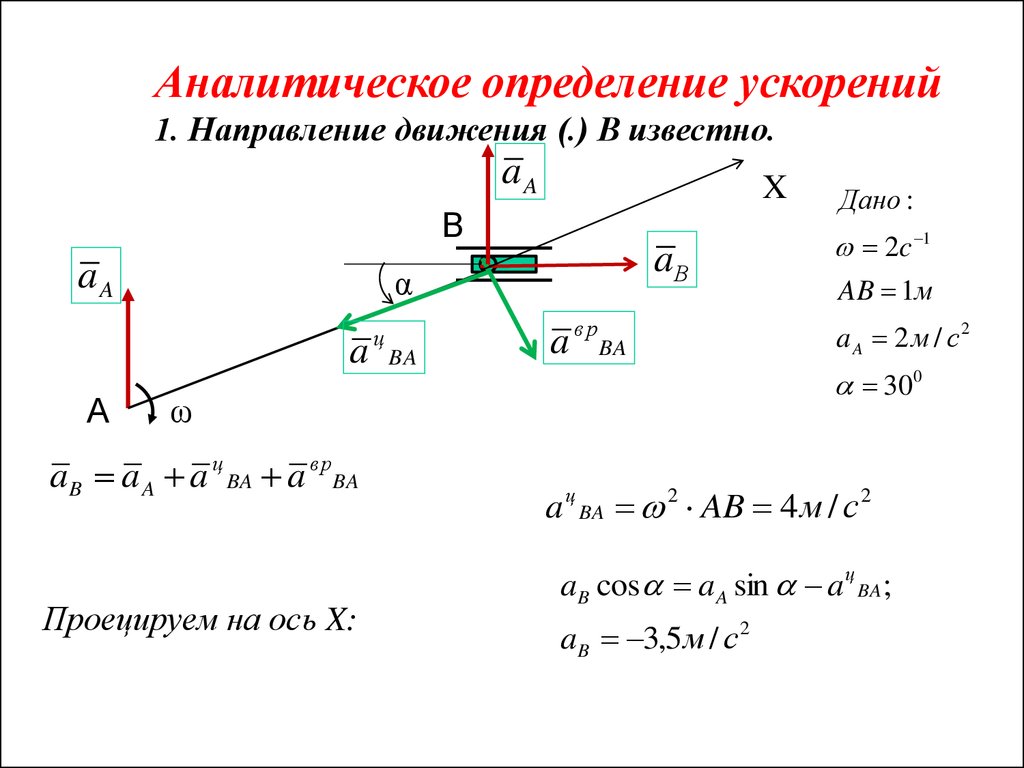
Аналитическое определение ускорений1. Направление движения (.) В известно.
aA
X
В
aA
α
a
А
aВ
ц
BA
a
вр
BA
Проецируем на ось X:
2c 1
AB 1м
aA 2 м / с2
300
ω
aB a A a ц BA a врBA
Дано :
a ц BA 2 AB 4 м / с 2
aB cos a A sin a ц BA ;
aB 3,5 м / с 2
15.
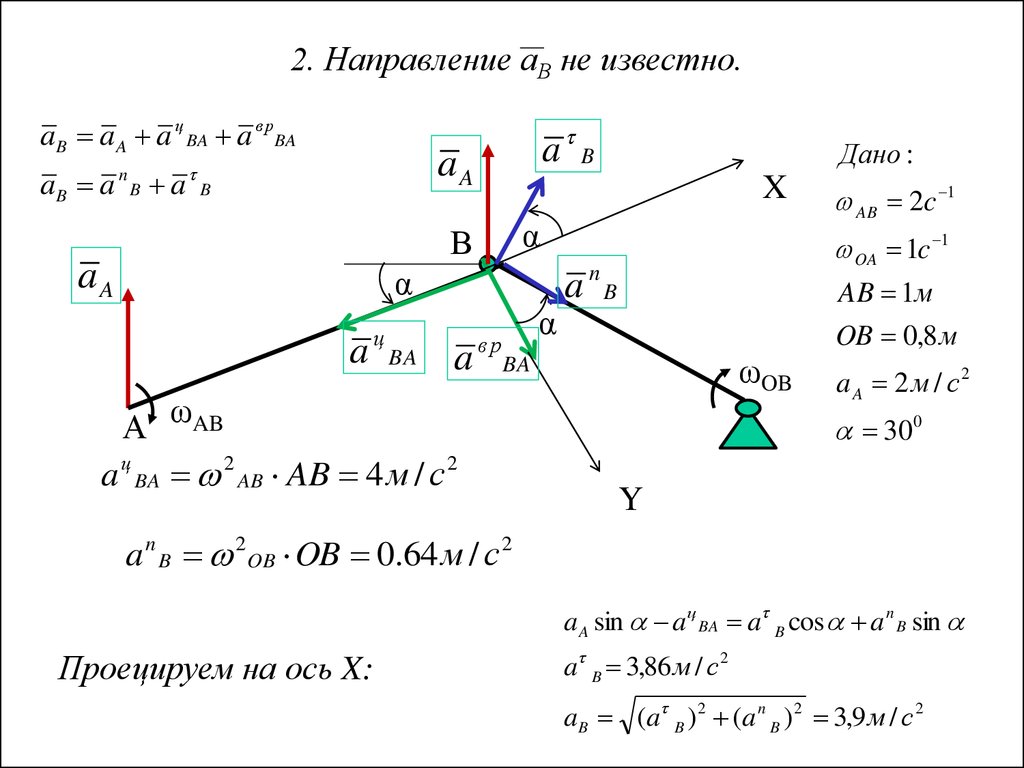
2. Направление аВ не известно.aB a A a ц BA a врBA
aB a
n
B
a
a B
aA
B
X
α
В
aA
α
a
ц
BA
a
Дано :
вр
α
OA 1c 1
a nB
AB 1м
OB 0,8 м
ωOB
BA
А ωAB
a ц BA 2 AB AB 4 м / с 2
AB 2c 1
aA 2 м / с2
300
Y
a n B 2 OB OB 0.64 м / с 2
a A sin a ц BA a B cos a n B sin
Проецируем на ось X:
a B 3,86 м / с 2
aB (a B ) 2 (a n B ) 2 3,9 м / с 2
16.
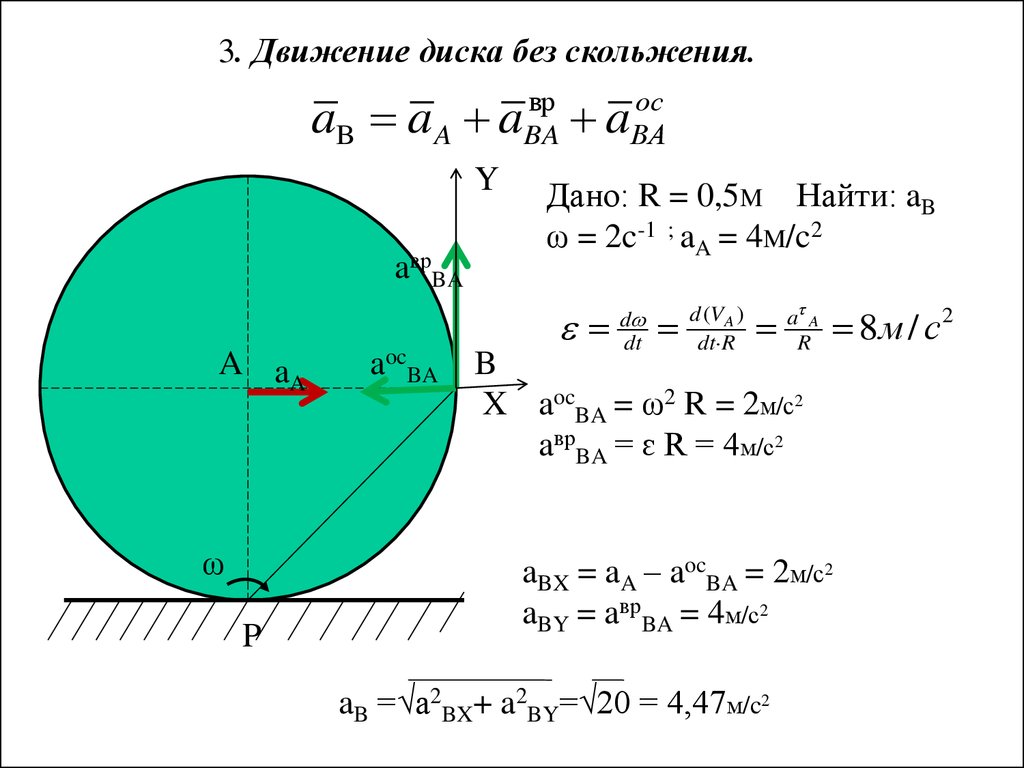
3. Движение диска без скольжения.aB a A a a
вр
BA
Y
aврBA
Дано: R = 0,5M Найти: aB
ω = 2c-1 ; aA = 4M/c2
A aA
ω
P
aocBA
ос
ВА
d
dt
d (VA )
dt R
a A
R
8м / с2
B
X aocBA = ω2 R = 2м/с2
aврBA = ԑ R = 4м/с2
aBX = aA – aocBA = 2м/с2
aBY = aврBA = 4м/с2
aB =√a2BX+ a2BY=√20 = 4,47м/c2
17. Кинематический анализ плоского механизма. Найти для заданного положения механизма скорости и ускорения точек А, В, С, а также угловые скоро
Кинематический анализ плоского механизма.Найти для заданного положения механизма скорости и ускорения точек А, В, С, а
также угловые скорости и угловые ускорения всех звеньев механизма.
Дано : ОА 2с 1; OA 3c 1;
VB
В
ОА 0,5 м; r 0,3м; R 0,4 м; АС 1м; 600
Рк
1. Определение скоростей:
к
ОА вращательное движение
VA ОА OA 2 0,5 1м / с
VA А
Колесо плоскопара л. движение
к
OA
OA
VC
O
AC
РАС
С
VA
APк
VB
BPк
; к
VA
APк
VrA 3,3c 1
VB к BP к 0,09 0,16 1,65 м / с
AC плоскопара л. движение
АС
VA
APAC
VC
CPAC
АС
VA
APAC
1
AC sin 600
1,15c 1
VC АС CP АС AC cos 600 0,57 м / с
18. Кинематический анализ плоского механизма. Построение плана скоростей механизма.
Дано : ОА 2с 1; OA 3c 1;VB
В
ОА 0,5 м; r 0,3м; R 0,4 м; АС 1м; 600
Рк
к
VA А
1. Определение скоростей:
ОА вращательное движение
VA ОА OA 2 0,5 1м / с
b
O
VB VA VBA
VBA AB
VB V ob 1,65 м / с
oa
с
OA
OA
Масштабный
коэффициен т
V 0,2
VA
V
1
0, 2
5см
VC
Сa
VC VA VCA
VCA AC
O
VC V oc 0.57 м / с
19. Свойства плана скоростей
1. Одноименные отрезки плана скоростей и механизмавзаимно перпендикулярны.
2. Одноименные отрезки плана скоростей и механизма
прямо пропорциональны.
3. Одноименные фигуры плана скоростей и механизма подобны
и повернуты друг относительно друга на угол 900
20. Аналитическое определение ускорений (для точки А и В):
yОА вращательное движение
aA a n A a A
a в рBA
a n A 2 ОА OA 4 0,5 2 м / с 2
a
Вa
ц
a A
x
A
Колесо плоскопарал. движение
aB a A aBA
anA
OA
OA
O
OA 3 0,5 1,5 м / с 2
a A 4 2,25 2,5 м / с 2
А
BA
ОА
aC
С
к 3,3c 1 ; к
a A
r
5c 2
a ц BA 2 к R 1,32 м / с 2
a в р BA
к
R 2м / с2
aBX a ц BA a A 0,82
aBY a в р BA a n A 0
aB aBX 0,82 м / с 2
21. Определение ускорений (для точки С):
xAC плоскопарал. движение
aC a A a n A a ц CA a в рCA
a ц CA 2 АС AC 1,3
a A
На x : aC cos 300 a A cos 600 a n A cos 300 a ц CA
А
aC 0,35 м / с 2
anA
На y : aC cos 600 a A cos 300 a n A cos 600 a в рCA
OA
OA
O
y
a ц CA
a в рCA
a в рCA 2,48 AC AC
aC
С
AC 2,48c 2
22. Геометрическое определение ускорения точки С.
aA a n A a Aa n A 2 ОА OA 4 0,5 2 м / с 2
a A
a A
А
ОА
OA 3 0,5 1,5 м / с 2
o1n1
an A
02,5 4см
n1a1
a A
10,,55 3см
a
a
OA
OA
O
a A оа V 2,5 м / с 2
С1
anA
a ц CA
aC
a ц CA 2 АС AC 1,3
a ц CA
a
1, 3
0,5
2,6
f1
VC a O1C1 0,35 м / с 2
С
a
о1
aC a A a n A a ц CA a в рCA
a1 f1
вр
CA
Масштабный
коэффициен т
a 0,5
a1
n1