
 physics
physicsSimilar presentations:










Кинематика сложного (составного) движения точки
1.
А.И. РодионовТеоретическая механика.
Ч.1. КИНЕМАТИКА
2.
Лекция № 8Кинематика сложного (составного)
движения точки.
Сложным движением называют такое движение
точки, которое можно представить в виде
геометрической суммы 2-х, 3-х… более простых
движений.
Рассмотрим в качестве примера кривошипно-ползунный
механизм, изображенный на Рис. 39. Здесь точка М
движется по шатуну по какому-то закону. Попытка описать
ее движение в обычной постановке как в К-1 оказывается
чрезвычайно трудной задачей. Гораздо проще можно
рассмотреть ее движение как составное.
3.
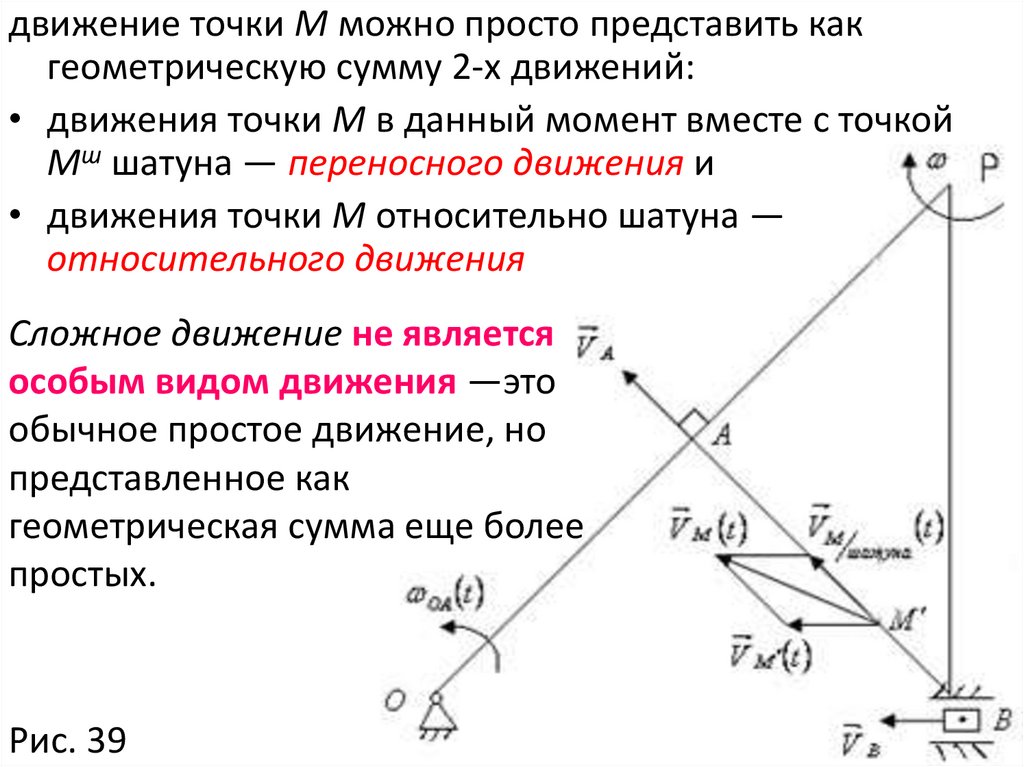
движение точки М можно просто представить какгеометрическую сумму 2-х движений:
• движения точки М в данный момент вместе с точкой
Мш шатуна — переносного движения и
• движения точки М относительно шатуна —
относительного движения
Сложное движение не является
особым видом движения —это
обычное простое движение, но
представленное как
геометрическая сумма еще более
простых.
Рис. 39
4.
§8.1. Общая постановка задачи осложном движении точки.
В физических основах механики выделяют инерциальные
и неинерциальные системы отсчета. Рассмотрим
движение точки М по отношению к 2-м таким системам
координат, представленным на Рис.40. Задачу
представим как задачу о наведении перехватчика на
бомбардировщик противника.
5.
z0Тр( ) M c
Рис. 40
Тр ( ) M o
RC
k0
С0
Тр ( )С
i0
j0
x0
y0
В соответствии с аксиомами классической
кинематики (евклидовой геометрии)
запишем для точки М:
0 0 0 0 0 0
R
tt)
(
tM)yy(MtC)/ C(jt(0)t )
rMM/ CR((M
RCxRMMC / (C
xt(C)tri)(M
j0j (z tM) z (Ctz)(Mkt )/ Ck 0(t )k
/ tiC0)y
0it )(
6.
Движение точки М по отношению к осям условнонеподвижной инерционной системе координат
( x 0 , y 0 , z 0 ), с началом в точке О, называется
абсолютным движением или просто движением
этой точки.
В соответствии с научной традицией будем все
абсолютные величины метить индексом “а”: Va V , aa a
Движение точки М по отношению к произвольно
движущейся неинерциальной системе отсчета с
началом в точке С (x,y,z ) назовем относительным.
Все относительные величины будем метить индексом “r”
(от французского слова relative — относительный):
Vr V , ar a
7.
Абсолютная и относительная траектории существуетобъективно, и мы можем о них говорить.
Переносным движением точки М назовем движение
той точки М΄ подвижного пространства,
связанного с осями подвижной системы координат,
по отношению к неподвижному пространству,
через которую в данный момент проходит
движущаяся точка М.
В соответствии с научной традицией будем все
переносные величины обозначать индексом “е”: Vе , aе
8.
Так как в каждый момент времени движущаяся точка Мпроходит через разные точки М΄ подвижного
пространства, которые движутся по разным траекториям
относительно неподвижных осей, то говорить о
переносной траектории, о ее существовании не имеет
смысла. Можно лишь говорить об элементе переносной
траектории, связанном с вектором dS e в данный момент
времени. В целом движение системы координат x,y,z
относительно системы координат x 0 , y 0 , z 0 можно
представить как движение подвижного пространства
сквозь неподвижное.
9.
§8.2. Теорема Бура об абсолютной иотносительной производных
любого вектора по времени.
Пусть задан вектор b bx (t )i (t ) by (t ) j (t ) bz (t )k (t ) (50)
в подвижных осях.
Тогда: абсолютная производная от вектора по
времени будет равна геометрической сумме
его относительной производной и
поворотной компоненты
db d r b
b
dt
dt
(51)
10.
Доказательство:Вычислим эту производную непосредственно. Тогда
db d
(bx (t ) i (t ) b y (t ) j (t ) bz (t ) k (t ))
dt dt
db
di
dj
dk
bx i bx
by j by
bz k bz
dt
dt
dt
dt
Здесь возникает вопрос о том, какое движение совершают
концы единичных векторов i, j, k и каким образом
можно вычислить производные от них?
Во первых, скорости концов этих векторов
перпендикулярны самим векторам по теореме о
производной от единичного вектора по параметру.
11.
Ясно, что они совершаютвращательное движение с
угловой скоростью e вокруг мгновенной оси,
проходящей через точку С. А раз так, то эти производные
можно вычислить по формуле Эйлера.
di di
dj
dk
i
e i
j
e j k
e k
dt dt
dt
dt
db
bx i e i bx by j e j by bz k e k bz
dt
db
bx i by j bz k e b
dt
Или в компактной форме записи:
db d r b d r b
e b
bx i by j bz k
dt dt
dt
(52)
12.
§8.3. Теорема сложения скоростей.Выясним вопрос о том, как можно найти скорость точки
по её относительной и переносной скоростям? Для этого
докажем теорему о сложении скоростей. Она
формулируется так:
Абсолютная скорость точки геометрически
складывается из 2-х скоростей — относительной и
переносной.
V Va Vr Ve
(53)
13.
Воспользуемся теоремой Бура. ТогдаdRc dr d r r
Va V
VC
e r
dt
dt
dt
dt
de def dR
r
dr r
Vr
dt
(54)
M
Ve Vc e r Vc VM C ,таким образом
Ve Vc e r
(55)