

 physics
physicsSimilar presentations:










Сложное движение точки
1.
Сложное движение точки – такое движение, при котором точка участвует одновременно в двух или нескольких движениях.Примеры сложного движения точки (тела): лодка, переплывающая реку; человек, идущий по движущемуся эскалатору; камень подвижной кулисы,
поршень качающегося цилиндра; шары центробежного регулятора Уатта.
Для описания сложного движения точки или для представления движения в виде сложного используются
неподвижная система отсчета O1 , связанная с каким-либо условно неподвижным телом, например, с Землей, и
подвижная система отсчета Oxyz, связанная с каким-либо движущимся телом.
Абсолютное движение ( a ) - движение точки, рассматриваемое относительно неподвижной системы
vr
a
отсчета. Относительное движение ( r ) - движение точки, рассматриваемое относительно подвижной
v
z
системы отсчета.
r
M
Переносное движение ( e ) - движение подвижной системы отсчета, рассматриваемое относительно
ve
неподвижной системы отсчета.
y
ωe
Абсолютная скорость (ускорение) точки va ( aa ) - скорость (ускорение) точки, вычисленная относительно
r z
неподвижной системы отсчета.
k j
e O x vO
Относительная скорость (ускорение) точки vr ( ar ) – скорость (ускорение) точки, вычисленная относительно
i y
подвижной системы отсчета.
Переносная скорость (ускорение) точки ve ( ae ) – скорость (ускорение) точки,
O
принадлежащей подвижной системе координат или твердому телу, с которым жестко связана подвижная
O1
система координат,
совпадающей с рассматриваемой движущейся точкой в данный момент времени и
x
вычисленная относительно неподвижной системы отсчета.
Теорема о сложении скоростей – абсолютная скорость точки равна геометрической сумме относительной и переносной скоростей точки.
В любой момент времени справедливо соотношение:
O r O xi yj zk .
Продифференцируем это соотношение по времени имея в виду, орты i, j, k изменяют свое направление в общем случае движения
свободного тела, с которым связана подвижная система координат:
Здесь первое слагаемое (vO) - скорость полюса O;
следующие три – относительная скорость точки (vr).
d d O dr d O dx
dy
dz
di
dj
dk
i
j k x y z .
dt
dt
dt
dt
dt
dt
dt
dt
dt
dt
di
( e i );
dt
dj
Здесь
использована
векторная
формула
для
Таким
образом, с учетом
того,
что
( e j );
линейной
скорости
точки относительно
оси вращения:
производная
по времени
радиуса-вектора
a dt r
v v v e.
есть абсолютная скорость, получаем:
dr d
dk
( e r ).
( e k ).
2
2
Модуль вектора
dt dt
v a v r v e 2 v r dt
v e sin( v r , v e ) .
Для последних трех слагаемых следует определить
производные по времени от ортов i, j, k:
абсолютной скорости:
vO
vr
Подставим векторные
произведения
в последние три слагаемые:
x( e i ) y( e j ) z ( e k )
e ( xi yj zk ) e r .
Сумма первого и последнего слагаемого
– скорость точки свободного тела есть
ve
переносная скорость точки (ve):
vO e r .
2.
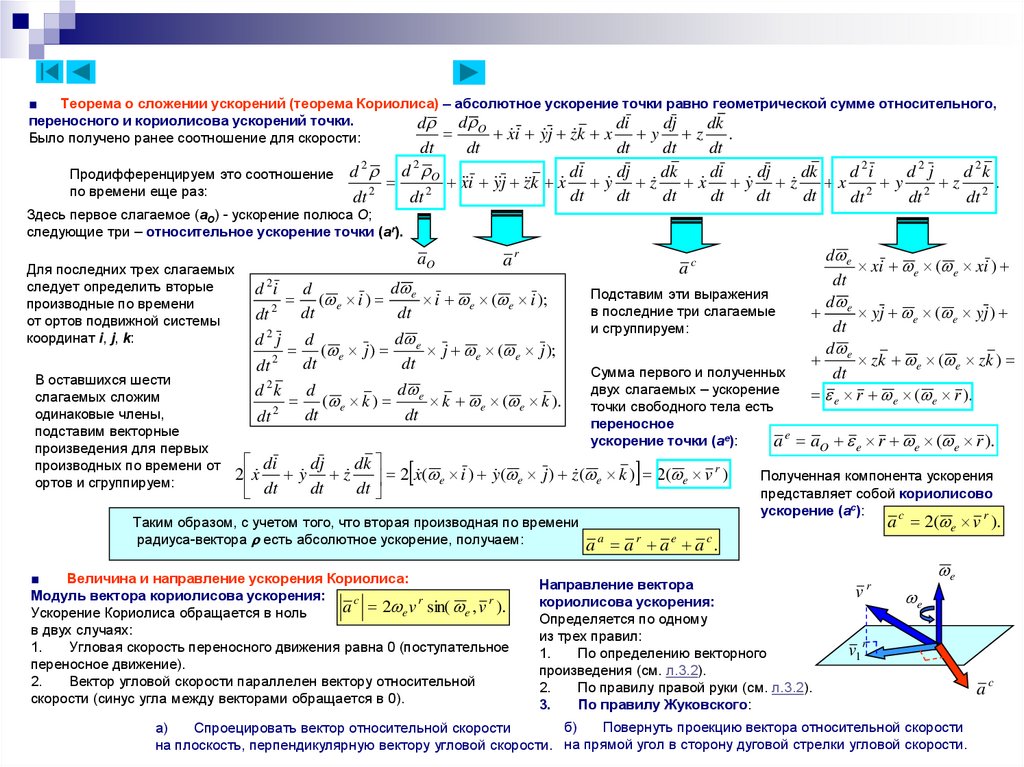
■Теорема о сложении ускорений (теорема Кориолиса) – абсолютное ускорение точки равно геометрической сумме относительного,
переносного и кориолисова ускорений точки.
d d O
di
dj
dk
x i y j z k x y z .
Было получено ранее соотношение для скорости:
dt
dt
dt
dt
d O
di
dj
dk
di
dj
dk
d 2i
d2 j
d 2k
Продифференцируем это соотношение d
x i y j z k x y z
x y z
x 2 y 2 z 2 .
по времени еще раз:
dt
dt
dt
dt
dt
dt
dt 2
dt 2
dt
dt
dt
2
dt
2
Здесь первое слагаемое (aO) - ускорение полюса O;
следующие три – относительное ускорение точки (ar).
Для последних трех слагаемых
следует определить вторые
производные по времени
от ортов подвижной системы
координат i, j, k:
В оставшихся шести
слагаемых сложим
одинаковые члены,
подставим векторные
произведения для первых
производных по времени от
ортов и сгруппируем:
aO
ar
d e
d 2i d
( e i )
i e ( e i );
2
dt
dt
dt
d e
d2 j d
( e j )
j e ( e j );
2
dt
dt
dt
d e
d 2k
d
( e k )
k e ( e k ).
2
dt
dt
dt
ac
Подставим эти выражения
в последние три слагаемые
и сгруппируем:
Сумма первого и полученных
двух слагаемых – ускорение
точки свободного тела есть
переносное
ускорение точки (ae):
ae
di
dj
dk
2 x y z 2 x ( e i ) y ( e j ) z ( e k ) 2( e v r ).
dt
dt
dt
Таким образом, с учетом того, что вторая производная по времени
радиуса-вектора есть абсолютное ускорение, получаем:
■
Величина и направление ускорения Кориолиса:
Модуль вектора кориолисова ускорения:
a c 2 e v r sin( e , v r ).
Ускорение Кориолиса обращается в ноль
в двух случаях:
1.
Угловая скорость переносного движения равна 0 (поступательное
переносное движение).
2.
Вектор угловой скорости параллелен вектору относительной
скорости (синус угла между векторами обращается в 0).
d e
xi e ( e xi )
dt
d e
yj e ( e yj )
dt
d e
zk e ( e zk )
dt
e r e ( e r ).
aO e r e ( e r ).
Полученная компонента ускорения
представляет собой кориолисово
ускорение (ac):
c
r
a 2( e v ).
a a a a .
a
r
e
c
Направление вектора
кориолисова ускорения:
Определяется по одному
из трех правил:
1.
По определению векторного
произведения (см. л.3.2).
2.
По правилу правой руки (см. л.3.2).
3.
По правилу Жуковского:
vr
v1
e
e
r
б)
Повернуть проекцию вектора относительной скорости
a)
Спроецировать вектор относительной скорости
на плоскость, перпендикулярную вектору угловой скорости. на прямой угол в сторону дуговой стрелки угловой скорости.
ac
3.
■Причины возникновения ускорения Кориолиса: Формально ускорение Кориолиса было выведено группировкой слагаемых произведений,
содержащих проекции относительной скорости и производные по времени от ортов подвижной системы координат. При этом ранее было получено
удвоенное число таких слагаемых.
Для прояснения физических причин возникновения ускорения Кориолиса рассмотрим качественный пример, в котором специально будем
полагать постоянными вектор относительной скорости (в подвижной системе координат) и вектор угловой переносной скорости (вращения
подвижной системы координат относительно неподвижной оси):
Пусть в некоторый момент времени положение точки и вектора относительной и переносной скоростей таковы, как они изображены н
рисунке (вид сверху):
ve
vr
ve
vr
ωe
ωe
Через некоторое время точка удалится от оси вращения и тело повернется
на некоторый угол.
В результате:
1)
относительная скорость изменится по направлению из-за наличия
переносной угловой скорости и
2)
переносная линейная скорость изменится по величине из-за
наличия относительной скорости, изменяющей расстояние точки до
оси вращения.
Таким образом, можно считать что существует две причины возникновения
ускорения Кориолиса:
1) переносная угловая скорость влияет на относительную скорость, a
2) относительная скорость в свою очередь влияет на переносную линейную скорость.
Возможно, это поможет запомнить коэффициент, равный двум, в формуле,
определяющей ускорение Кориолиса.
c
r
■
Примеры определения направления ускорения Кориолиса
удобно рассмотреть для случаев различного положения движущихся
точек по поверхности Земли, вращающейся относительно своей оси:
a 2( e v ).
vr
vr
ac
ac
a
vr
c
vr
vr
e