













 physics
physics mechanics
mechanicsSimilar presentations:







 движение точки")


Занятие №6. Сложное движение материальной точки
1. Сложное движение материальной точки
Занятие №62.
• Пусть точка М движетсяотносительно
некоторой
неизменяемой среды S,
• которая в свою очередь
движется относительно другой
тоже неизменяемой среды .
• Будем рассматривать среду
как неподвижную.
• Связанную с ней систему
координат
можно
назвать
неподвижной
системой отсчета.
• Со средой S связывают
систему
координат
Oxyz,
которую называют подвижной
системой отсчета.
3.
• Движение произвольной точки Мотносительно подвижной среды S или
системы координат Oxyz называют
относительным;
• Движение этой же точки относительно
среды или системы координат
называют абсолютным.
• Движение же среды S в среде
называют переносным
4. Вывод формулы для скорости абсолютного движения точки
• Положение точки М внеподвижной системе координат
определяется радиус-вектором
• Положение точки М в подвижной
системе координат определяется
радиус-вектором r
• Положение начала подвижной
системы координат в неподвижной
определяется радиус-вектором 0
• Тогда, как видно из рисунка,
0 r
• Абсолютная скорость точки М
v 0 r
5.
Для определениявеличины r запишем общее выражение
для r в подвижной декартовой системе координат:
r xi yj zk
При вычислении производной по времени от необходимо
иметь в виду, что подвижная система координат в
общем случае может поворачиваться. Поэтому
r x i xi y j yj z k zk x i y j z k xi yj zk
Так как орты системы координат только вращаются, то их
производные будут равны чисто вращательным
скоростям их концов:
i i ; j j; k k ;
После подстановки этих выражений и вынесения общего
множителя получается:
r xi yj zk ( xi yj zk )
6.
Выражение в скобках – это вектор r . Остальные три слагаемыхпредставляют собой производную вектора r по времени в
предположении, что подвижная система координат Oxyz является
неподвижной. Такая производная называется локальной или
относительной производной вектора r по времени:
dr
r
xi yj zk
dt
Выражение для абсолютной скорости принимает вид:
v r r
Первое слагаемое – скорость начала подвижной системы координат,
последнее – скорость вращательного движения точки подвижной
системы координат, в которой находится точка М, вокруг начала
подвижной системы координат. Поэтому оба слагаемых отвечают
только за движение точки подвижной системы координат и
составляют переносную скорость:
ve v0 r
7.
Согласно определению локальной производной,выражение r является скоростью точки М по
отношению к подвижной системе координат. Поэтому
эта составляющая называется относительной скоростью
точки М v
r
Таким образом, для абсолютной скорости точки М
получается следующее выражение:
v v0 r vr ve vr
Последнее равенство выражает теорему сложения
скоростей, более известную как закон сложения скоростей
Галлилея:
При сложном движении точки ее абсолютная
скорость равна векторной сумме переносной и
относительной скоростей.
8. Примеры решения задач
9. Задача №1
Берега реки параллельны; лодка вышла из точки А и,держа курс перпендикулярно берегам, достигла
противоположного берега через t1=10 мин после
отправления. При этом она попала в точку С,
лежащую на 120 м ниже точки А по течению реки.
Чтобы, двигаясь с прежней относительной
скоростью, попасть из точки А в точу В, лежащую на
прямой АВ, перпендикулярно берегам, лодке надо
держать курс под некоторым углом к прямой АВ и
против течения; в этом случае лодка достигнет
противоположного берега через t2=12,5 мин.
Определить ширину реки l, относительную скорость
u лодки по отношению к воде и скорость v течения
реки.
10. Задача №2
На токарном станке обтачивается цилиндрдиаметра d = 80 мм. Шпиндель делает
n = 30 об/мин. Скорость продольной подачи
v = 0,2 мм/с. Определить скорость vr резца
относительно обрабатываемого цилиндра.
11.
• Необходимо рассматривать движение резца вдольстанка как комбинацию двух движений: движение
поверхности детали и движение резца относительно
поверхности детали.
• Движение детали будет
переносным
• Движение резца
относительно детали –
относительным
• Движение резца
относительно станка –
абсолютным
12.
• Из условия задачи80
мм
мм
ve R 2 30 2400
125, 67
2
мин
с
• На основании чертежа
мм
vr v v 125, 7
с
2
e
2
13. Вывод формулы для ускорения абсолютного движения точки
• Для определения абсолютного ускорения точкинеобходимо продифференцировать выражение для
абсолютной скорости по времени:
dv d
w
v0 r vr v0 r r vr
dt dt
• Первое слагаемое представляет собой ускорение начала
подвижной системы координат:
v0 w0
• Во втором слагаемом первый сомножитель – угловое
ускорение подвижной системы координат:
• В третьем слагаемом второй сомножитель определен :
r r vr
14.
Последнее слагаемое ищется из следующих соображений:вектор v определен в подвижной системе координат,
r
также, как
и вектор r . Поэтому для вычисления
производной по времени от него можно воспользоваться
теми же подходами.
Согласно уже сделанным выводам
После замены
r r r
vr vr vr
Подстановка в формулу для ускорения дает
w w0 r r vr vr vr
w0 r r wr 2 vr
15.
• Первые три слагаемых в сумме дают переносноеускорение точки:
we w0 r r
• Четвертое слагаемое является по определению
относительным ускорением точки (как локальная
производная относительной скорости):
• Последнее слагаемое в формуле
wr vr
wc 2 vr
называется поворотным ускорением или ускорением
Кориолиса.
w we wr wc
Таким образом
Абсолютное ускорение точки равно векторной сумме
переносного,
относительного
и
поворотного
ускорений. (теорема Кориолиса)
16.
В случае неподвижного начала подвижной системы координат илиее поступательного движения для определения вращательных
составляющих переносного ускорения можно использовать
теорему Ривальса. Согласно ей,
r p
r p
2
где р – расстояние от точки до мгновенной оси вращения системы
координат (в случае неподвижного ее начала) или до прямой,
параллельной
мгновенной
оси
вращения
(в
случае
поступательного движения подвижной системы координат)
Направление первой составляющей перпендикулярно и
мгновенной оси вращения подвижной системы
координат, и перпендикуляру, опущенному из точки на
нее (т.н. тангенциальная составляющая переносного
ускорения).
Направление второй составляющей - из точки в сторону
мгновенной оси вращения подвижной системы
координат перпендикулярно ей (т.н. нормальная
составляющая переносного ускорения).
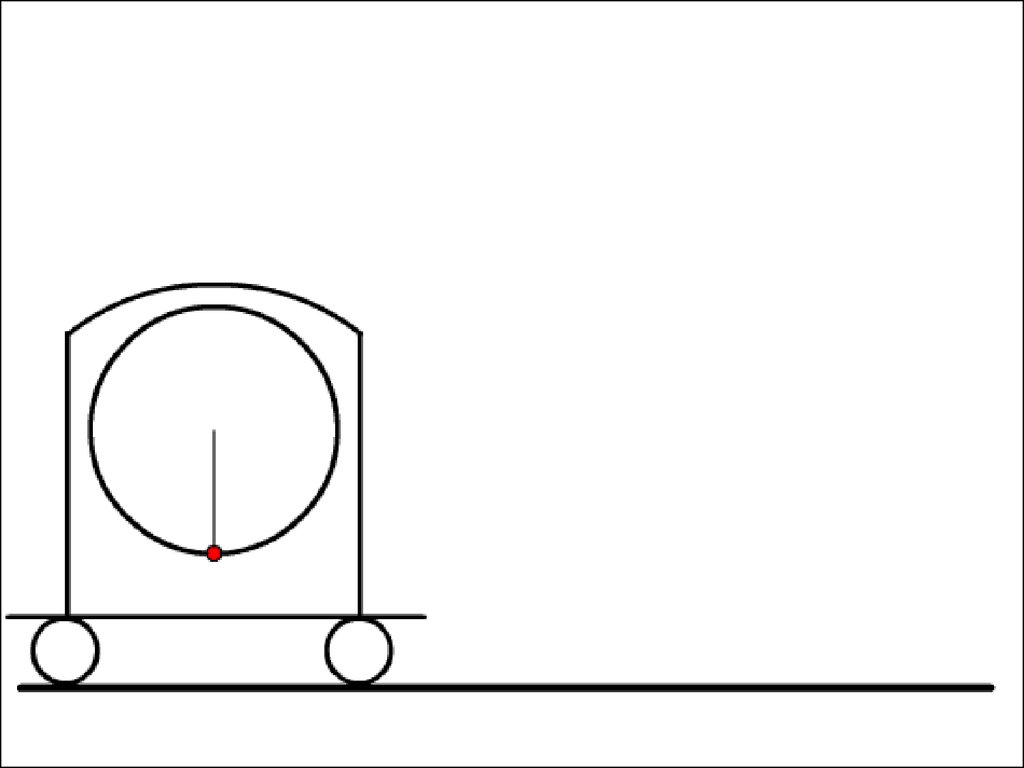
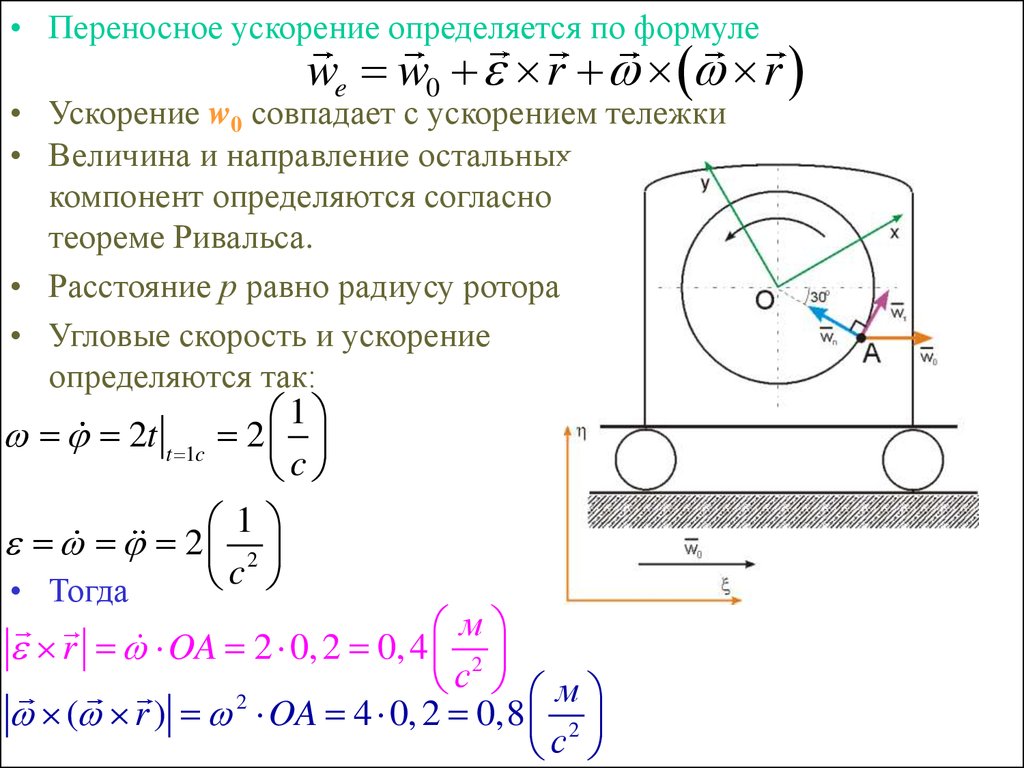
17. Задача №3
На тележке, движущейся погоризонтали вправо с ускорением
w0= 0,492 м/с2, установлен
электромотор, ротор которого
при пуске в ход вращается
согласно уравнению = t2, причем
угол измеряется в радианах.
Радиус ротора равен 0,2 м.
Определить
абсолютное
ускорение точки А, лежащей на
ободе ротора, при t = 1 c, если в
этот момент точка А находится
в положении, указанном на
рисунке.
18.
19. Выбор систем координат
• Неподвижную системукоординат необходимо
связать с дорогой.
• Подвижную систему
координат можно
связать с вращающимся
ротором, ее начало
целесообразно
поместить на ось
вращения ротора О.
20.
• Переносное ускорение определяется по формулеwe w0 r r
• Ускорение w0 совпадает с ускорением тележки
• Величина и направление остальных
компонент определяются согласно
теореме Ривальса.
• Расстояние р равно радиусу ротора
• Угловые скорость и ускорение
определяются так:
1
2t t 1c 2
c
1
2 2
c
• Тогда
м
r OA 2 0, 2 0, 4 2
с м
( r ) 2 OA 4 0, 2 0,8 2
с
21. Оставшиеся два элемента ускорения
• Так как подвижная система координат вращается вместес ротором, а точка А – часть этого ротора, то, очевидно,
относительного движения точки А нет, а значит,
wr 0
• По этой же причине относительная скорость равна
нулю, откуда следует, что кориолисово ускорение
wc 2 vr 0
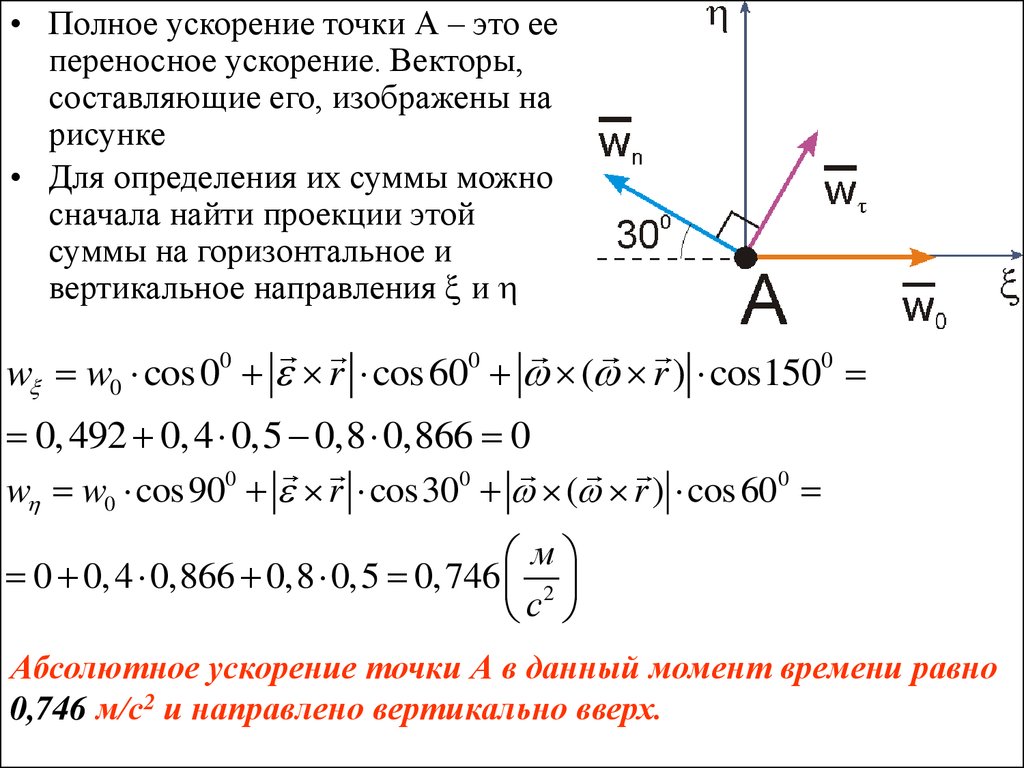
22.
• Полное ускорение точки А – это еепереносное ускорение. Векторы,
составляющие его, изображены на
рисунке
• Для определения их суммы можно
сначала найти проекции этой
суммы на горизонтальное и
вертикальное направления и
w w0 cos 00 r cos 600 ( r ) cos1500
0, 492 0, 4 0,5 0,8 0,866 0
w w0 cos 900 r cos 300 ( r ) cos 600
м
0 0, 4 0,866 0,8 0,5 0, 746 2
с
Абсолютное ускорение точки А в данный момент времени равно
0,746 м/с2 и направлено вертикально вверх.
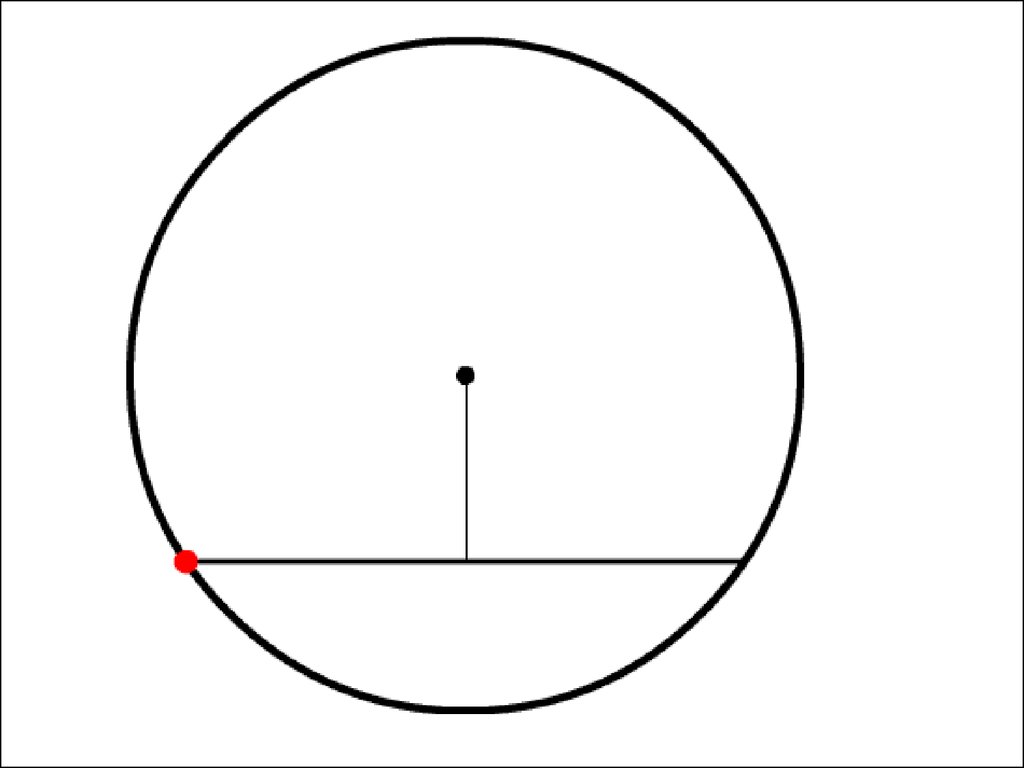
23. Задача №4
Точка М движется равномерно сотносительной скоростью по
хорде
диска,
который
вращается вокруг своей оси О,
перпендикулярной
плоскости
диска, с постоянной угловой
скоростью
.
Определить
абсолютные
скорость
и
ускорение точки в тот момент,
когда
она
находится
на
кратчайшем расстоянии h от
оси, в предположении, что
относительное движение точки
происходит в сторону вращения
диска
24.
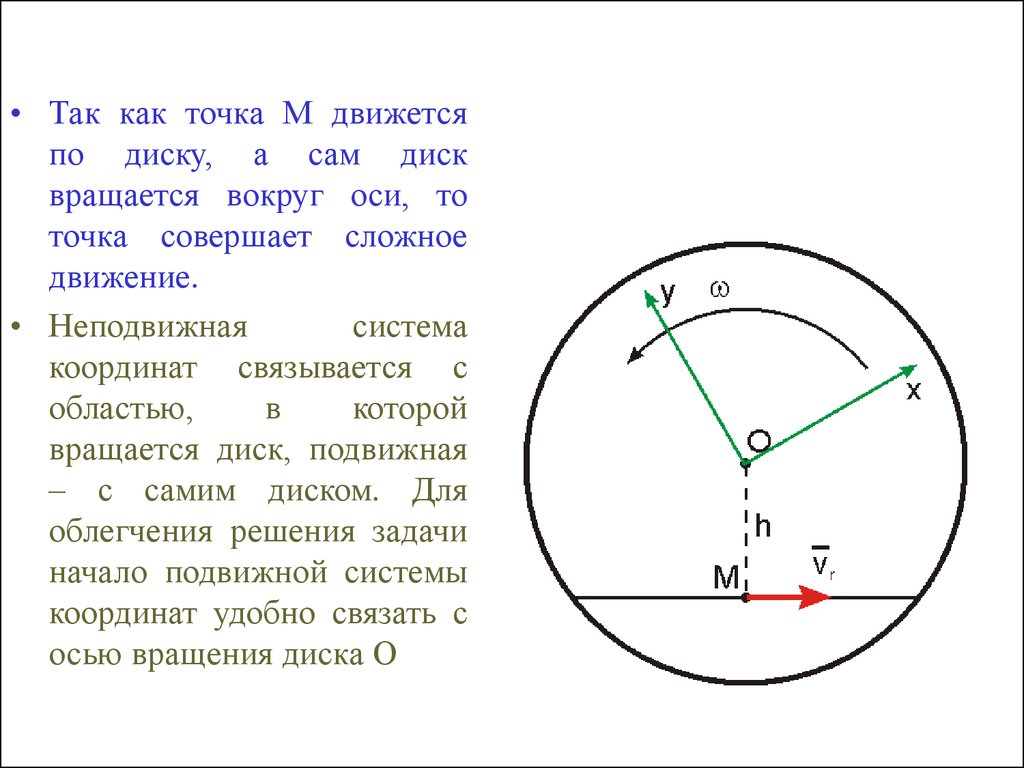
25.
• Так как точка М движетсяпо диску, а сам диск
вращается вокруг оси, то
точка совершает сложное
движение.
• Неподвижная
система
координат связывается с
областью,
в
которой
вращается диск, подвижная
– с самим диском. Для
облегчения решения задачи
начало подвижной системы
координат удобно связать с
осью вращения диска О
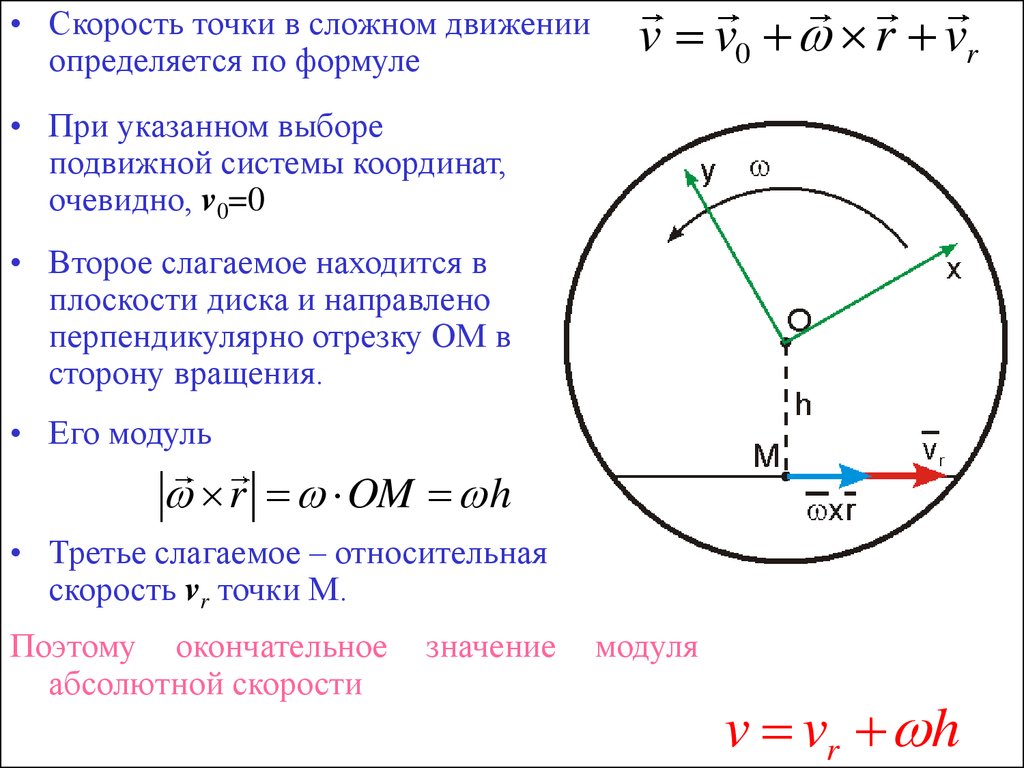
26.
• Скорость точки в сложном движенииопределяется по формуле
v v0 r vr
• При указанном выборе
подвижной системы координат,
очевидно, v0=0
• Второе слагаемое находится в
плоскости диска и направлено
перпендикулярно отрезку ОМ в
сторону вращения.
• Его модуль
r OM h
• Третье слагаемое – относительная
скорость vr точки М.
Поэтому окончательное
абсолютной скорости
значение
модуля
v vr h
27. Ускорение точки в сложном движении определяется по основной формуле для ускорения
w w0 r r wr 2 vr• Первое слагаемое w0=0
• Согласно теореме Ривальса, модуль
тангенциальной составляющей
переносного ускорения равен h = 0.
• Нормальная составляющая
переносного ускорения согласно той
же теореме равна 2h и направлена
в сторону оси вращения подвижной
системы координат.
• Согласно условию задачи, точка М
по диску движется прямолинейно
(вдоль хорды) и равномерно.
Поэтому wr=0
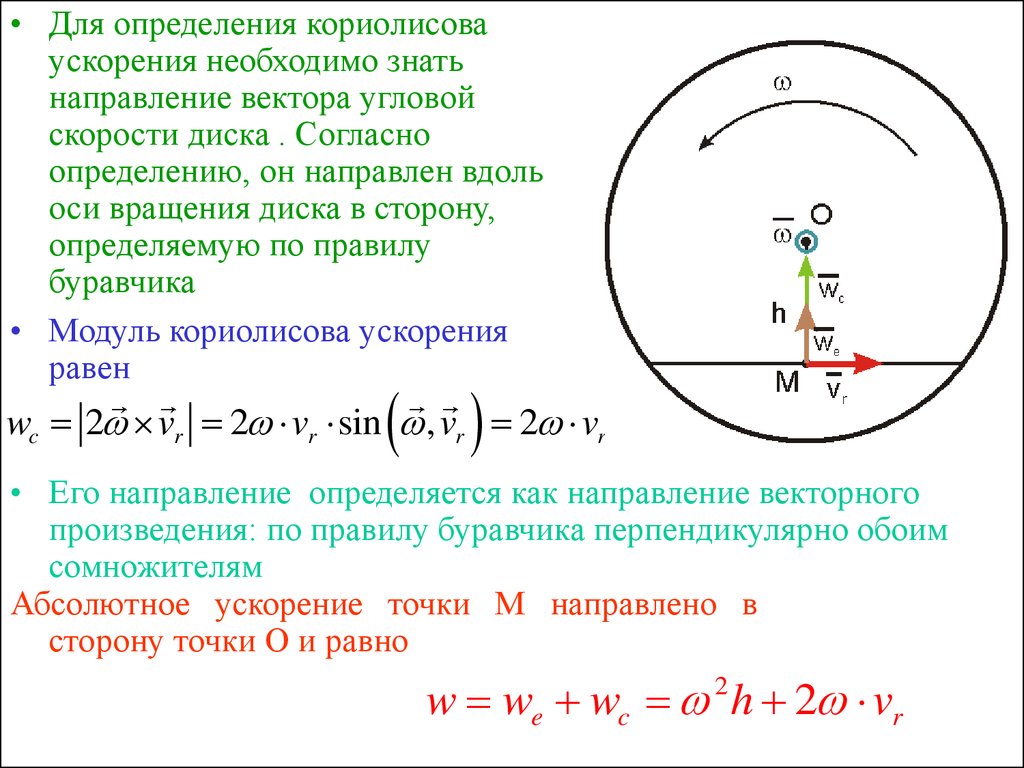
28.
• Для определения кориолисоваускорения необходимо знать
направление вектора угловой
скорости диска . Согласно
определению, он направлен вдоль
оси вращения диска в сторону,
определяемую по правилу
буравчика
• Модуль кориолисова ускорения
равен
wc 2 vr 2 vr sin , vr 2 vr
• Его направление определяется как направление векторного
произведения: по правилу буравчика перпендикулярно обоим
сомножителям
Абсолютное ускорение точки М направлено в
сторону точки О и равно
w we wc 2 h 2 vr