 physics
physics mechanics
mechanicsSimilar presentations:


")







Прямолинейные колебания материальной точки. Лекция 1.3.2
1.
Лекцияпо учебной дисциплине Теоретическая механика
Тема: «Прямолинейные колебания материальной точки»
2.
Учебные вопросы.1. Условие возникновения колебаний. Классификация колебаний.
2. Свободные колебания без учета сил сопротивления. Затухающие
колебания. Вынужденные колебания.
3.
Условие возникновения колебаний.Колебания являются одним из наиболее распространенных видов
движения. Колебательный процесс сопровождается многократным чередованием
возрастания и убывания некоторых характеризующих его физических величин.
Колебательные движения материальной точки происходят при условии,
если на эту точку при отклонении ее от положения равновесия действует сила F,
стремящаяся вернуть точку в это положение. Такая сила называется
восстанавливающей.
4.
Различают четыре основных случая колебательного движенияматериальной точки:
свободные
колебания,
совершающиеся
под
действием
только
восстанавливающей силы;
свободные колебания, совершающиеся под действием восстанавливающей
силы и силы сопротивления движению;
вынужденные колебания, совершающиеся под действием восстанавливающей
силы и силы периодического характера, называемой возмущающей силой;
вынужденные колебания, совершающиеся под действием восстанавливающей
силы, возмущающей силы и силы сопротивления движению.
5.
Рассмотрим влияние указанных сил в случае малых прямолинейныхколебаний материальной точки (без учета сил сопротивления). Таким образом,
будем решать вторую (основную) задачу динамики материальной точки,
когда по известным силам, действующим на точку, определяется закон ее
движения.
Проведем
исследования
колебательных
процессов
на
модели,
представляющей собой тело, лежащее на гладкой горизонтальной плоскости и
прикрепленное
к
неподвижной
вертикальной
плоскости
горизонтальной
пружиной. Так как тело движется поступательно, то будем рассматривать его в
качестве материальной точки.
6.
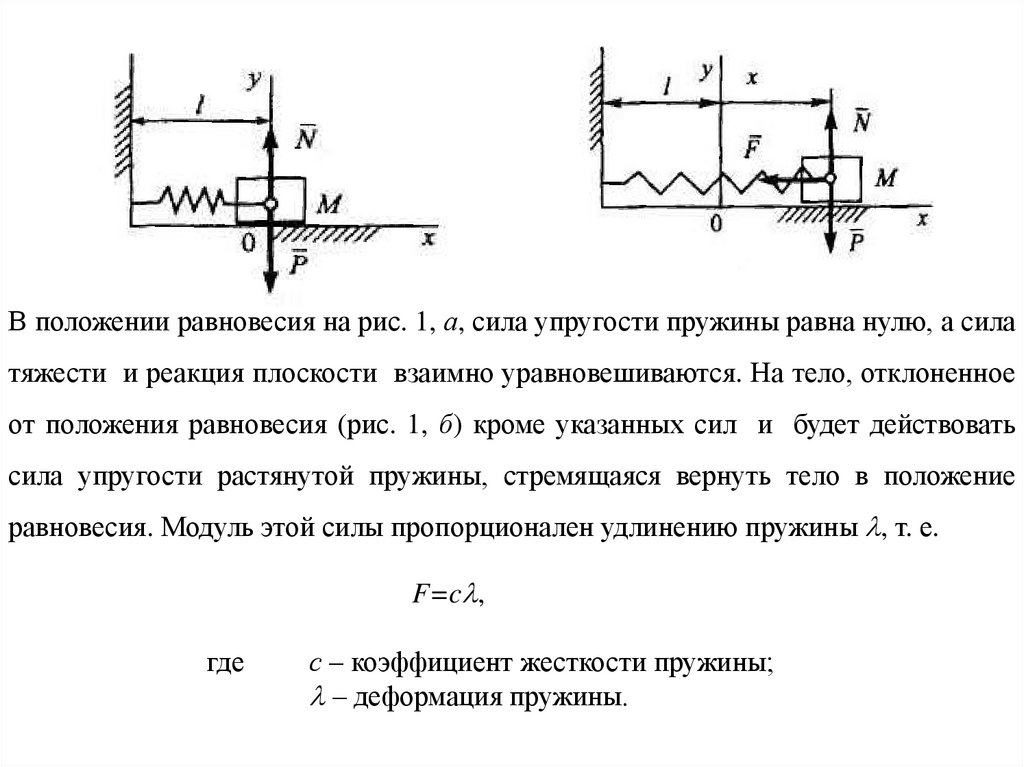
В положении равновесия на рис. 1, а, сила упругости пружины равна нулю, а силатяжести и реакция плоскости взаимно уравновешиваются. На тело, отклоненное
от положения равновесия (рис. 1, б) кроме указанных сил и будет действовать
сила упругости растянутой пружины, стремящаяся вернуть тело в положение
равновесия. Модуль этой силы пропорционален удлинению пружины , т. е.
F=c ,
где
с – коэффициент жесткости пружины;
– деформация пружины.
7.
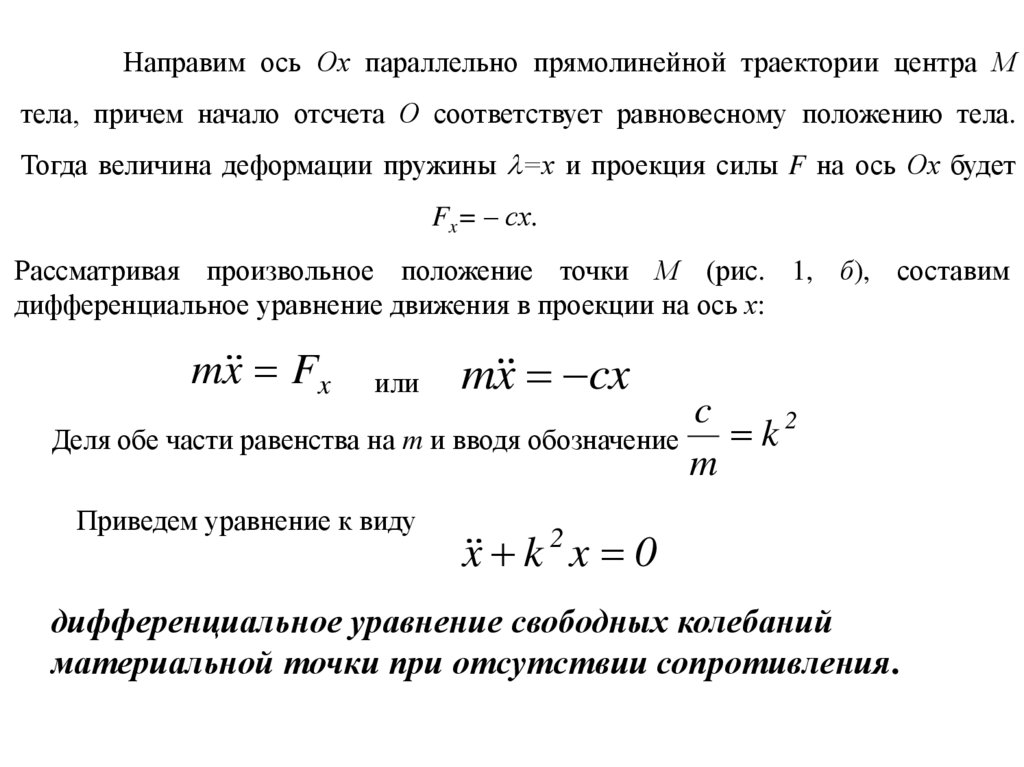
Направим ось Ох параллельно прямолинейной траектории центра Мтела, причем начало отсчета О соответствует равновесному положению тела.
Тогда величина деформации пружины =х и проекция силы F на ось Ох будет
Fx= – сx.
Рассматривая произвольное положение точки М (рис. 1, б), составим
дифференциальное уравнение движения в проекции на ось х:
m x Fx
или
m x cx
c
k2
Деля обе части равенства на m и вводя обозначение
m
Приведем уравнение к виду
x k 2 x 0
дифференциальное уравнение свободных колебаний
материальной точки при отсутствии сопротивления.
8.
Решение этого линейного однородного диф. уравнения второго порядкаищут в виде
х = е