












 mathematics
mathematicsSimilar presentations:
")









Синтез оптимальных дискретных детерминированных систем. Нахождение оптимального программного управления (лекция 2)
1.
Лекция 2СИНТЕЗ ОПТИМАЛЬНЫХ НЕПРЕРЫВНЫХ
ДЕТЕРМИНИРОВАННЫХ СИСТЕМ
НАХОЖДЕНИЕ ОПТИМАЛЬНОГО ПРОГРАММНОГО
УПРАВЛЕНИЯ
2.
Постановка задачиПоведение
модели
объекта
управления
обыкновенным дифференциальным уравнением
описывается
x (t ) f (t, x(t ), u(t )) ,
(1)
x – вектор состояния системы, x ( x1, , x n )T R n ;
u – вектор управления, u (u1,..., uq )T U R q , U – некоторое
заданное множество допустимых значений управления;
t – непрерывное время, t T [t 0 , t1] – промежуток времени
функционирования системы;
f (t , x, u) – непрерывная вместе со своими частными производными
вектор-функция,
f (t , x, u) ( f1 (t , x, u),..., f n (t , x, u)) T ,
f (t , x, u) : T R n U R n ;
пространство.
Rn
–
n-мерное
евклидово
3.
Момент начала процесса t 0 задан, а момент окончания процесса t1определяется первым моментом достижения точкой (t , x (t )) некоторой
заданной поверхности R n 1 :
{ (t1, x) | i (t1, x) 0, i 1,..., l ; t1 (t 0 , ),
x Rn } ,
(2)
т.е. в момент t1 должны выполняться условия
i (t1, x(t1 )) 0 ,
i = 1, , l , 0 l n 1.
при l n 1 множество представлено точкой в пространстве R n 1 ,
функции i (t1, x ) – непрерывно дифференцируемы;
система
i (t1, x )
i (t1, x ) i (t1, x )
,
,
,
,
x
xn
t1
1
линейно независима (t1, x ) R n 1 .
векторов
Начальное условие задано x(t 0 ) x0 .
i 1,..., l ,
4.
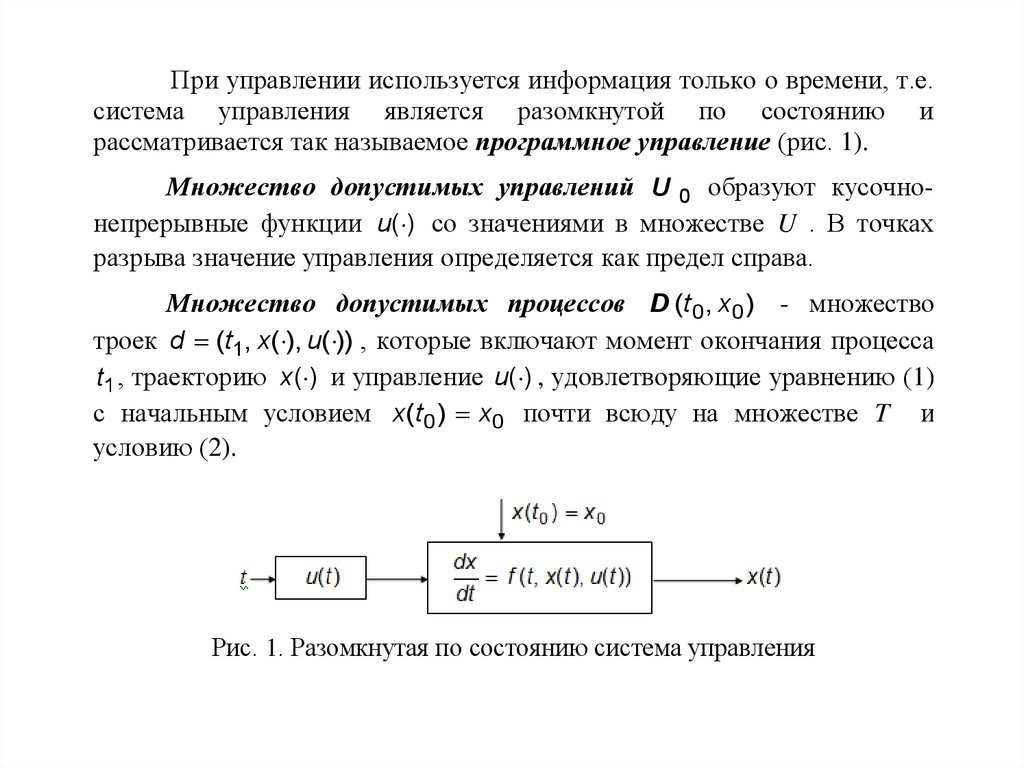
При управлении используется информация только о времени, т.е.система управления является разомкнутой по состоянию и
рассматривается так называемое программное управление (рис. 1).
Множество допустимых управлений U 0 образуют кусочнонепрерывные функции u( ) со значениями в множестве U . В точках
разрыва значение управления определяется как предел справа.
Множество допустимых процессов D (t 0 , x0 ) - множество
троек d (t1, x( ), u( )) , которые включают момент окончания процесса
t1 , траекторию x ( ) и управление u( ) , удовлетворяющие уравнению (1)
с начальным условием x(t 0 ) x0 почти всюду на множестве T и
условию (2).
Рис. 1. Разомкнутая по состоянию система управления
5.
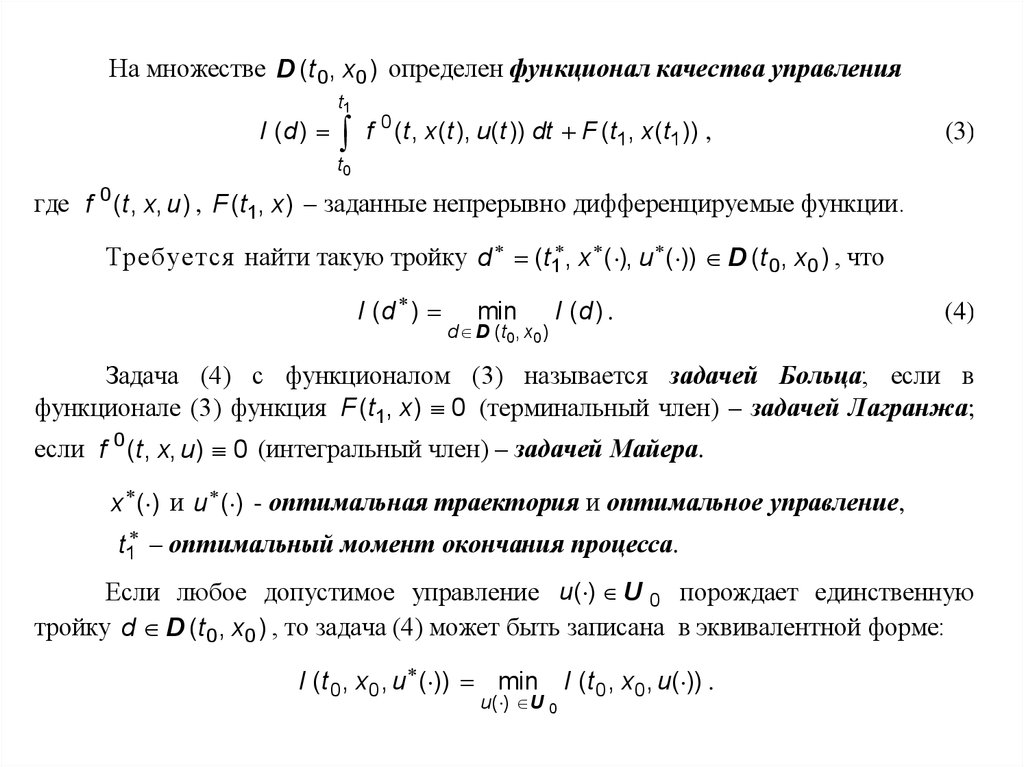
На множестве D (t 0 , x0 ) определен функционал качества управленияI (d )
t1
f 0 (t , x (t ), u(t )) dt F (t1, x (t1 )) ,
(3)
t0
где f 0 (t , x, u) , F (t1, x) – заданные непрерывно дифференцируемые функции.
Треб уется найти такую тройку d (t1 , x ( ), u ( )) D (t 0 , x0 ) , что
I (d )
min
d D ( t0 , x0 )
I (d ) .
(4)
Задача (4) с функционалом (3) называется задачей Больца; если в
функционале (3) функция F (t1, x) 0 (терминальный член) – задачей Лагранжа;
если f 0 (t , x, u) 0 (интегральный член) – задачей Майера.
x ( ) и u ( ) - оптимальная траектория и оптимальное управление,
t1 – оптимальный момент окончания процесса.
Если любое допустимое управление u( ) U 0 порождает единственную
тройку d D (t 0 , x0 ) , то задача (4) может быть записана в эквивалентной форме:
I (t 0 , x0 , u ( )) min I (t 0 , x0 , u( )) .
u( ) U 0
6.
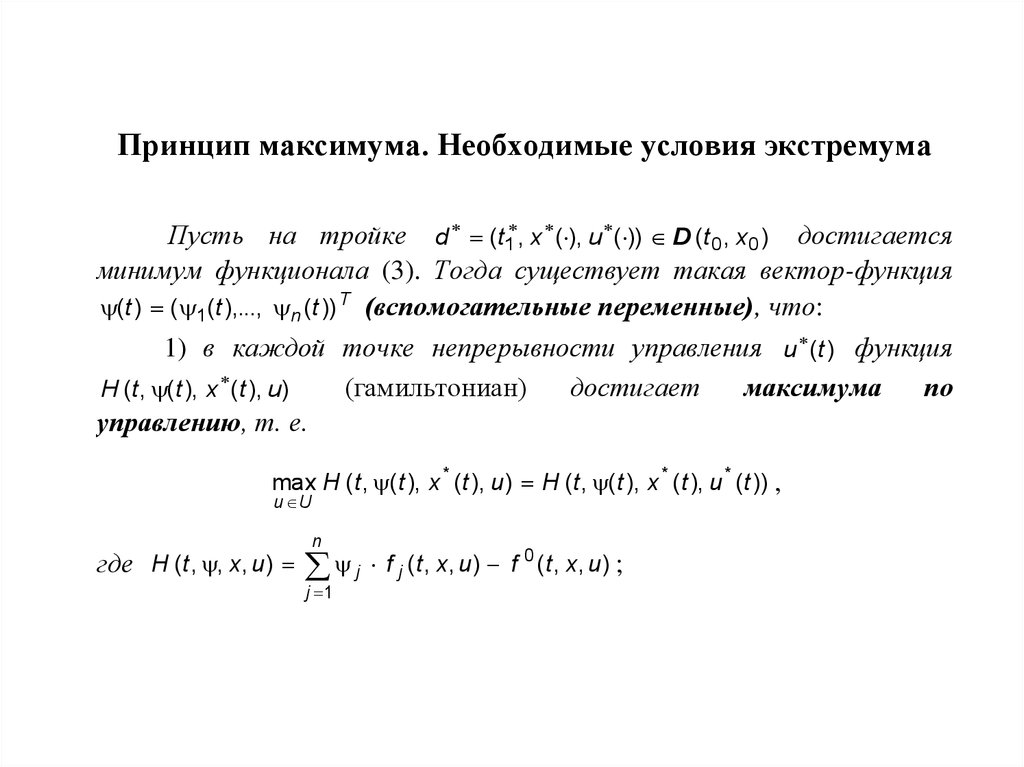
Принцип максимума. Необходимые условия экстремумаПусть на тройке d (t1 , x ( ), u ( )) D (t 0 , x0 ) достигается
минимум функционала (3). Тогда существует такая вектор-функция
(t ) ( 1 (t ),..., n (t )) T (вспомогательные переменные), что:
1) в каждой точке непрерывности управления u (t ) функция
(гамильтониан)
достигает
максимума
по
H (t , (t ), x (t ), u)
управлению, т. е.
max H (t , (t ), x * (t ), u) H (t , (t ), x * (t ), u * (t )) ,
u U
где H (t , , x, u)
n
j
j 1
f j ( t , x, u ) f 0 ( t , x, u ) ;
7.
2) выполняется условие трансверсальностиF (t1* )
H
(t1* )
t1
n
j (t1* ) x j
0
(5)
j 1
при любых t1 и x j , удовлетворяющих системе
i (t1 , x (t1 )) 0 , i (t1 , x (t1 )) 0 ,
где H (t1 ) H (t1 , (t1 ), x (t1 ), u (t1 )) ,
определяются следующим образом:
F (t1 )
F (t1 ,
i (t1 ,
x
x
(t1 ))
(t1 ))
i 1, , l ,
F (t1 ) F (t1 , x (t1 )) ,
F (t1 , x (t1 ))
t1
t1
i (t1 , x (t1 ))
t1
t1
а
вариации
F (t1 , x (t1 ))
x j ,
x
j
j 1
n
i (t1 , x (t1 ))
x j ;
x
j
j 1
n
3) функции x ( ), ( ) удовлетворяют системе канонических уравнений
x j (t )
H (t , (t ), x (t ), u (t ))
f j (t , x (t ), u (t )) ,
j
x j (t 0 ) x 0 j ,
H (t , (t ), x (t ), u (t ))
j (t )
,
xj
j 1, , n .
j 1, , n ,
(6)
8.
Замечания1. В частном случае задания множества Г, когда момент времени t1 задан
и фиксировано k координат x11, , x k 1 вектора x (t1 ) , т.е. t1 T1 , x j (t1 ) x j 1 ,
j 1, , k ; 0 k n , l k + 1, функции j ( t1, x ) имеют вид
j (t1, x ) x j x j 1 0 ,
j 1, , k ;
k 1 (t1, x ) t1 T1 0 .
Здесь при k n правый конец траектории фиксирован, а при k 0
свободен. Отсюда следует, что x j 0 , j 1, , k ; t1 0 .
Решаемая задача с фиксированным временем окончания записывается
в форме
I (d )
t1
f 0 (t , x (t ), u(t )) dt F ( x (t1 )) min .
t0
Решением этой задачи является пара
траектория и управление.
( x ( ), u ( )) : оптимальные
9.
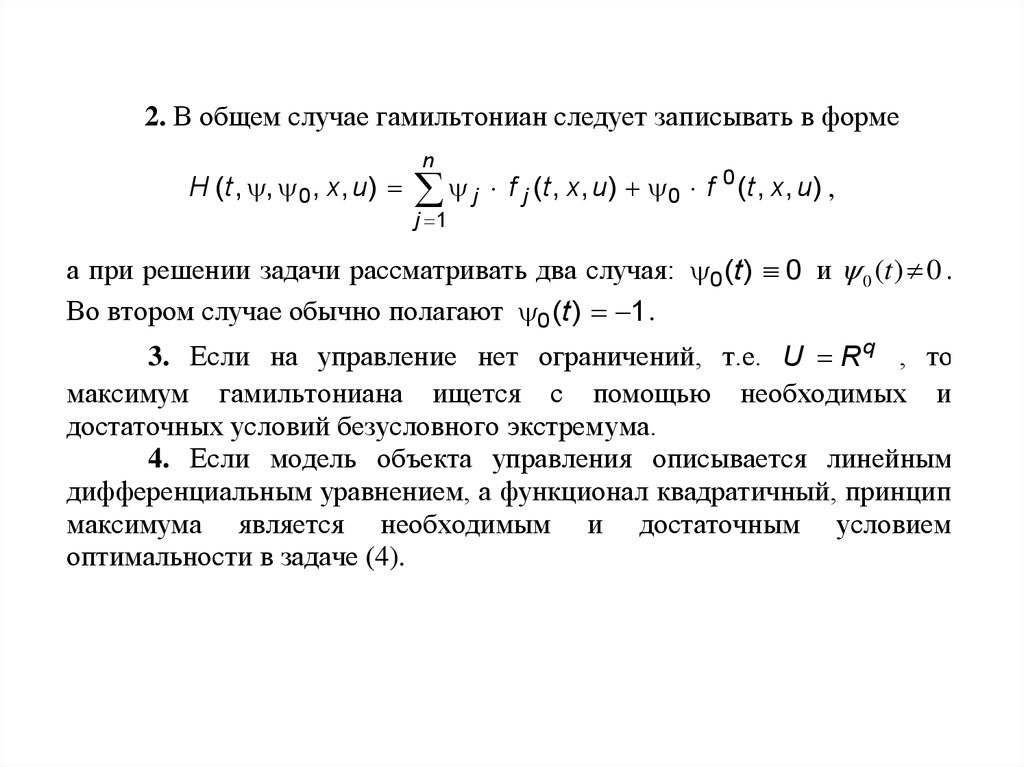
2. В общем случае гамильтониан следует записывать в формеH (t , , 0 , x, u)
n
j f j ( t , x, u ) 0 f 0 ( t , x, u ) ,
j 1
а при решении задачи рассматривать два случая: 0 (t ) 0 и 0 (t ) 0 .
Во втором случае обычно полагают 0 (t ) 1 .
3. Если на управление нет ограничений, т.е. U R q , то
максимум гамильтониана ищется с помощью необходимых и
достаточных условий безусловного экстремума.
4. Если модель объекта управления описывается линейным
дифференциальным уравнением, а функционал квадратичный, принцип
максимума является необходимым и достаточным условием
оптимальности в задаче (4).
10.
АЛГОРИТМ ПРИМЕНЕНИЯ ПРИНЦИПАМАКСИМУМА
1. Составить гамильтониан: H (t , , x, u)
n
j
j 1
f j ( t , x, u ) f 0 ( t , x, u ) .
2. Найти структуру оптимального управления u (t ) u (t , (t ), x(t )) из
условия максимума гамильтониана по управлению.
3. Составить систему канонических уравнений (6) с заданными в задаче
условиями.
4. Из условий трансверсальности (5) получить недостающие краевые
условия для уравнений составленной системы.
5. Решить двухточечную краевую задачу для системы канонических
уравнений, полученную в п. 3, с учетом результатов пп. 2 и 4. В итоге
определяется тройка (t1 , x ( ), u ( )) , на которой может достигаться экстремум
функционала.
11.
Пример 1.Даны модель объекта управления
x (t ) u(t ) , x ( 0) 0 , x (1)
где x R ; u R ; t [ 0; 1] , и функционал
1
,
2
1
I
[ u 2 (t ) x 2 (t ) ] dt min .
0
Tребуется найти оптимальную пару ( x ( ), u ( )) , на которой достигается
минимум функционала.
Сравнивая с общей постановкой задачи, имеем:
f ( t , x, u ) u ,
F (t1, x) 0 ,
f 0 (t , x, u) u 2 x 2 ,
1
2 (t1, x (t1 )) x(1) 0 . Решается задача Лагранжа.
2
1(t1, x(t1 )) t1 1 0 ,
12.
1. Составляем гамильтониан: H (t , , x, u) u u 2 x 2 .2. Находим максимум гамильтониана по управлению. Так как
ограничения на управление отсутствуют, можно применить необходимые
условия безусловного экстремума
H (t , (t ), x (t ), u) (t ) 2u 0 .
u
(t )
Отсюда u (t )
. Найденное управление обеспечивает максимум функции
2
H (t , (t ), x (t ), u) по управлению, так как удовлетворяются достаточные
условия экстремума
2
H (t , (t ), x (t ), u) 2 0 .
u
3. Выписываем уравнения системы (6):
2
x (t ) u (t )
(t )
1
(t )
, x ( 0) 0 , x (1) ,
2
2
H (t , (t ), x(t ), u(t )) 2x(t ) .
x
13.
4. Проверяем условия трансверсальности (5). Так как F (t1, x) 0 ,то F 0 и H (t1 ) t1 (t1 ) x
t1 1
0 . Поскольку t1 1 и x (t1 )
1
2
заданы,
то t1 0 , x 0 . Поэтому условия трансверсальности
выполняются.
5. Решаем полученную двухточечную краевую задачу:
x (t )
(t )
1
, x ( 0) 0 , x (1) ,
2
2
(t ) 2x ( t ) .
Последовательно находим:
(t )
x(t ),
2
x(t ) C1 et C 2 e t ,
x(0) C1 C 2 0 ,
C 2 C1 , C1
x (t )
x(1) C1 e C 2 e 1
u * (t )
1
,
2
В результате находится искомая пара:
x (t )
e ( et e t )
2 (e 1)
2
, u (t )
e ( e t e t )
2 (e 1)
2
.
e
2(e 2 1)
(t )
x * (t ) .
2
,
14.
Пример 2.Даны модель объекта управления
x (t ) x(t ) u(t ) , x ( 0) 0 ,
где x R ; u R ; t [ 0; 1] , и функционал
1
I
u 2 (t ) dt x (1) min .
0
Требуется найти оптимальную пару ( x ( ), u ( )) , на которой
достигается минимум функционала.
Сравнивая с общей постановкой задачи, имеем: f (t , x, u) x u ,
f 0 (t , x, u) u 2 , F (t1, x ) x , 1(t1, x(t1 )) t1 1 0 . Решается задача
Больца.
15.
1. Составляем гамильтониан: H (t , , x, u) ( x + u) u 2 .2.Находим максимум гамильтониана по управлению:
H (t , (t ), x(t ), u) (t ) 2u 0 .
u
2
(t )
Отсюда u (t )
и 2 H (t , (t ), x (t ), u) 2 0 .
2
u
3. Выписываем уравнения системы (6) с учетом результата п.2:
x (t ) x(t ) u (t ) x(t )
(t )
(t )
, x ( 0) = 0 ,
2
H (t , (t ), x(t ), u(t )) (t ) .
x
4. Проверяем условие трансверсальности. Так как F (t1, x) x , то F x .
Согласно условию, x H (t1 ) t1 (t1 ) x
t1 1
0 . Поскольку t1 1 , то t1 0 .
Ограничений на x (t1 ) не наложено, поэтому вариация x произвольна. В результате
имеем (t1 ) 1 x
t1 1
0 и, следовательно, (1) 1 0 .
16.
5. Решаем полученную двухточечную краевую задачу:x (t ) x(t )
(t )
, x ( 0) = 0 ,
2
(t ) (t ) ,
(1) 1 .
Из второго уравнения с конечным условием имеем (t ) e1 t . Поэтому
оптимальное управление u (t )
(t ) 1 1 t
e .
2
2
e1 t
Решая первое уравнение системы x (t ) x(t )
2
x ( 0) = 0 , последовательно получаем:
с начальным условием
x0 (t ) Cet – общее решение однородного уравнения,
x ч (t )
e t
e – частное решение неоднородного уравнения,
4
x(t ) x0 (t ) xч (t ) Cet
x(0) C
e t
e – общее решение неоднородного уравнения,
4
e
e
0, C .
4
4
Следовательно, оптимальная траектория x (t )
1 1 t
e e1 t .
4
17.
Пример 3.Даны модель объекта управления
x 1(t ) x2 (t ) , x1(0) 1 , x1( 2) 0 ,
x 2 (t ) u(t ) ,
x2 (0) 1 , x2 (2) 0 ,
где x ( x1, x2 )T R 2 , u R , t [ 0; 2] , и функционал
1
I
2
2
u
2
(t ) dt min .
0
Требуется найти оптимальную пару ( x * ( ), u* ( )) , на которой достигается
минимум функционала.
Сравнивая с общей постановкой задачи, имеем
f1(t, x, u) x2 , f 2 (t , x, u) u , f 0 (t , x, u)
1 2
u ,
2
F (t1, x) 0, 1(t1, x(t1 )) t1 2 0 ,
2 (t1, x(t1 )) x1( 2) 0 ,
Решается задача Лагранжа.
3 (t1, x(t1 )) x2 ( 2) 0 .
18.
1. Составляем гамильтониан: H (t , , x, u) 1 x 2 2 u1 2
u .
2
2. Находим максимум гамильтониана по управлению. Так как ограничения на
управление отсутствуют, можно применить необходимые условия безусловного
экстремума:
H (t , (t ), x (t ), u) 2 (t ) u 0 . Отсюда u * (t ) 2 (t ) .
u
Найденное управление обеспечивает максимум функции H (t , (t ), x (t ), u) по
управлению, так как удовлетворяются достаточные условия экстремума
2
H (t , (t ), x (t ), u) 1 0 .
2
u
3. Выписываем уравнения системы (6):
x 1(t ) x2 (t ) , x1(0) 1 , x1( 2) 0 ,
x 2 (t ) u(t ) 2 (t ) , x 2 (0) 1 , x 2 ( 2) 0 ,
1 (t )
2 (t )
H (t , (t ), x (t ), u(t )) 0 ,
x1
H (t , (t ), x(t ), u(t )) 1 (t ) .
x2
19.
4. Проверяем условия трансверсальности (5). Так как F (t1, x) 0 , а t1 2 ,x1( 2) 0 , x2 (2) 0 , т.е. заданы, то F 0 , t1 0 , x1 0 , x2 0 .
Следовательно, условия трансверсальности выполняются.
5. Решаем полученную в п.3 двухточечную краевую задачу:
1(t ) const C1 ,
C1 t 2
x 2 (t )
C 2 t C3 ,
2
2 (t ) C1t C 2 ,
C1 t 3 C 2 t 2
x1 (t )
C3 t C 4 .
6
2
Из краевых условий находим постоянные C1, C 2, C3, C 4 :
4
x1 ( 2) C1 2C 2 2C 3 C 4 0 ,
3
x1(0) C 4 1 ,
x2 (0) C3 1,
Отсюда C1 3 , C 2
x2 ( 2) 2C1 2C 2 C3 0 .
7
и искомая пара ( x * ( ) ( x1* ( ), x2* ( )) T , u* ( )) , где
2
x1* (t )
1 3 7 2
t t t 1,
2
4
x 2* ( t )
3 2 7
t t 1,
2
2
u * (t ) 2 (t ) 3 t
7
.
2
20.
Пример 4.Даны модель объекта управления
x 1(t ) x2 (t ) ,
x 2 (t ) x1(t ) u(t ) ,
| u | 1,
с начальными условиями x1(0) 0 , x2 (0) 0 и функционал
I x2 ( 2 ) min .
Требуется найти оптимальное программное управление u ( ) и
соответствующую ему траекторию x ( ) .
t [ 0; 2 ] , на управление наложено
Здесь
x ( x1, x 2 )T R 2 ,
ограничение | u | 1, т.е. u U [ 1; 1] ,
F (t1, x) x2 ,
f 0 (t , x, u) 0 ,
f1(t, x, u) x2 , f 2 (t, x, u) x1 u , 1(t1, x(t1 )) t1 2 0 .
Решается задача Майера.
21.
1. Составляем гамильтониан H (t, , x, u) 1 x2 2 [ x1 u ] .2. Находим максимум гамильтониана по управлению. Так как имеются
ограничения на управление, требуется найти условный максимум гамильтониана по
управлению. В данной задаче гамильтониан линеен по u на заданном отрезке
изменения управления [-1; 1], поэтому оптимальное управление имеет вид
1, 2 (t ) 0 ,
u (t ) arg max H (t , (t ), x(t ), u) = 1 sign 2 (t )
|u | 1
1, 2 (t ) 0 .
т.е. является релейным. Величина управления определяется знаком функции 2 (t ) .
3. Выписываем канонические уравнения (6) принципа максимума:
x 1(t ) x2 (t ) ,
x1(0) 0 ,
x 2 (t ) x1(t ) u (t ) x1(t ) sign 2 (t ) ,
1 (t )
2 (t )
x2 (0) 0 ,
H (t , (t ), x(t ), u (t )) 2 (t ) ,
x1
H (t , (t ), x(t ), u (t )) 1 (t ) .
x2
22.
4. Проверяем условия трансверсальности (5):F H (t1 ) t1
F (t1 , x )
t1
где F
t1
(
t
)
x
j 1
j
j 1
2
t1 2
0,
F (t1 , x )
x x j x 2 . Группируя члены, получаем
j
j 1
2
H ( 2 ) t1 1( 2 ) x1 [ 1 2 ( 2 ) ] x2 0 .
Момент окончания t1 задан, поэтому t1 0 . Так как правый конец
свободен, то вариации x1 , x2 считаются произвольными. Чтобы
равенство выполнялось для любых вариаций, необходимо, чтобы
1( 2 ) 0 , 2 ( 2 ) 1 .
23.
5. Решаем двухточечную краевую задачу с учетом пп. 2 и 4:x 1(t ) x2 (t ) , x1(0) 0 ;
x 2 (t ) x1(t ) sign 2 (t ) , x2 (0) 0 ;
1(t ) 2 (t ) , 1( 2 ) 0 ;
2 (t ) 1(t ) , 2 ( 2 ) 1 .
Имеем: 1(t ) sin t , 2 (t ) cost , u (t ) sign ( cost ) sign(cos t ) .
Найденное оптимальное управление u (t ) на отрезке [ 0, 2 ] имеет две точки
переключения и, следовательно, три промежутка знакопостоянства:
, u (t ) 1 , x1 (t ) cost 1 , x 2 (t ) sin t ;
2
3
2) при
, u (t ) 1 , x1 (t ) cost 2 sin t 1 ,
t
2
2
x 2 (t ) sin t 2 cost ;
3
3) при
t 2 , u (t ) 1 , x1 (t ) cost 4 sin t 1 ,
2
x2 (t ) sin t 4 cost .
1) при 0 t
Минимальное значение функционала равно x 2 ( 2 ) 4 .