












 mathematics
mathematicsSimilar presentations:
")









Синтез оптимальных дискретных детерминированных систем. Нахождение оптимального программного управления (лекция 3)
1.
Лекция 3СИНТЕЗ ОПТИМАЛЬНЫХ ДИСКРЕТНЫХ
ДЕТЕРМИНИРОВАННЫХ СИСТЕМ
НАХОЖДЕНИЕ ОПТИМАЛЬНОГО ПРОГРАММНОГО
УПРАВЛЕНИЯ
2.
Постановка задачиПусть поведение модели объекта управления описывается
разностным уравнением
x k 1 f k , x k , u k ,
k 0,1, , N 1,
(1)
x – вектор состояния системы, x R n ;
u – вектор управления, u U k R q ,
U k – некоторое замкнутое выпуклое множество допустимых
значений управления;
k – дискретное время, k T 0,1, , N 1 ,
N – число шагов,
f k , x, u : T R n U k R n – непрерывно дифференцируемая векторфункция, f k , x, u f1 k , x, u , , f n k , x, u T .
Начальное состояние системы (1) задано
x 0 x0 .
(2)
3.
Конечное состояние x N должно удовлетворять условию:Гi x N 0 ,
i 1, , l ,
(3)
где 0 l n , функции Гi x – непрерывно дифференцируемы; система
векторов
линейно
Гi x N / x1, , Гi x N / xn , i 1, , l ,
независима x N R n .
При управлении используется информация только о дискретном
времени k , т.е. применяется так называемое программное управление
(рис. 1).
Последовательность векторов u 0 , u 1 , , u N 1 - управление
u . Последовательность векторов x 0 , x 1 , , x N , определяемая
уравнением (1) с начальным условием (2) и управлением u , –
траектория x .
x0
u(k )
k
u(k )
x ( k 1)
x ( k 1) f ( k , x ( k ), u( k ))
x (k )
Задержка
Рис. 1. Схема программного управления
4.
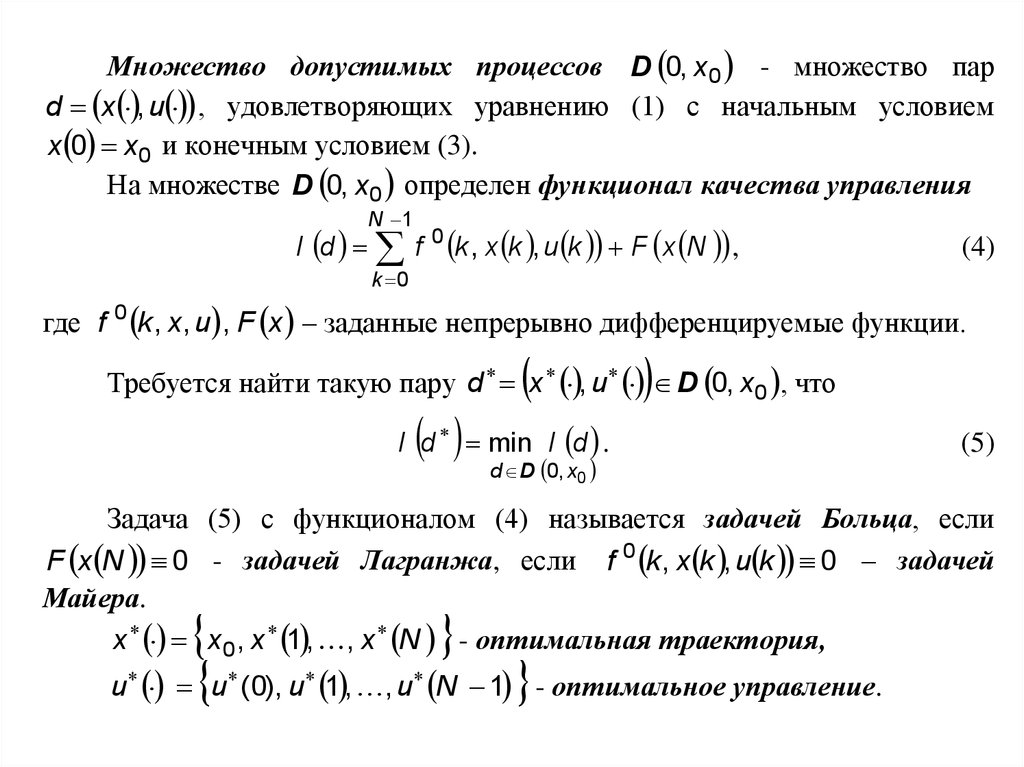
Множество допустимых процессов D 0, x0 - множество парd x , u , удовлетворяющих уравнению (1) с начальным условием
x 0 x0 и конечным условием (3).
На множестве D 0, x0 определен функционал качества управления
N 1
I d f
0
k , x k , u k F x N ,
(4)
k 0
где f
0
k , x, u , F x – заданные непрерывно дифференцируемые функции.
Требуется найти такую пару d x , u D 0, x0 , что
I d min I d .
d D 0, x0
(5)
Задача (5) с функционалом (4) называется задачей Больца, если
F x N 0 - задачей Лагранжа, если f 0 k , x k , u k 0 – задачей
Майера.
x x0 , x 1 , , x N - оптимальная траектория,
u u (0), u 1 , , u N 1 - оптимальное управление.
5.
Дискретный принцип максимумаПусть на паре d x , u D 0, x0 достигается минимум функционала.
Тогда существуют не равные нулю одновременно вектор-столбцы
(вспомогательные переменные) k 1 k , , n k T , k 1, , N , такие, что:
1) при каждом k 0,1, , N 1 гамильтониан H k , k 1 , x * k , u достигает
максимума по управлению, т.е.
H k , k 1 , x * k , u * k max H k , k 1 , x * k , u ,
u U k
(6)
n
где H k , , x, u i f i k , x, u f 0 k , x, u ;
i 1
2) функции x * , удовлетворяют системе канонических уравнений
x *j k 1 f j k , x * k , u * k ,
x *j 0 x 0 j ,
H k , k 1 , x * k , u * k
j k
,
xj
Гi x N 0,
j 1, , n,
j 1, , n,
i 1,..., l ;
k 0,1, , N 1 ,
k 1, , N 1,
(7)
6.
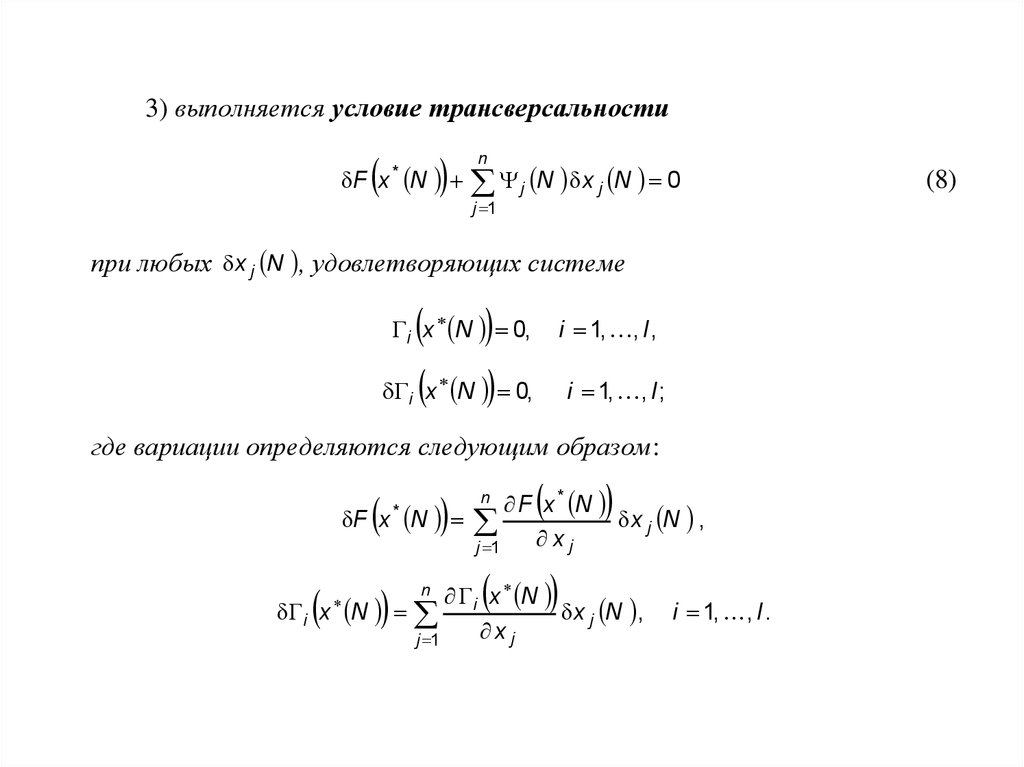
3) выполняется условие трансверсальностиF x N
*
n
j N x j N 0
j 1
при любых x j N , удовлетворяющих системе
Г x N 0,
Гi x N 0,
i 1, , l ,
i
i 1, , l ;
где вариации определяются следующим образом:
F x N
*
n
Г i x N
j 1
F x * N
x j N ,
x
j
j 1
n
x
Г i x N
x j
j
N ,
i 1, , l .
(8)
7.
Замечания1. Если в решаемой задаче ограничения (3) на правом конце траектории
отсутствуют, то условие трансверсальности (8)
n
j 1
F x * N
j N x j N 0
x
j
в силу произвольности вариации x j N приобретает вид
F x * N
j N
,
x j
j 1, , n .
(9)
2. Если в функционале (4) F x N 0 и отсутствуют ограничения (3), то
условие (8) в силу произвольности вариации x j N принимает форму
j N 0,
j 1, , n .
(10)
3. Если U k R q , то для нахождения максимума в (6) может быть
использовано необходимое условие безусловного экстремума
H k , k 1 , x * k , u
0,
ui
k 0,1, , N 1,
с проверкой соответствующих достаточных условий.
i 1, , q
(11)
8.
4. Утверждение справедливо, если множество U k выпукло, агамильтониан является вогнутой функцией по u . Дискретный принцип
максимума применим для систем с выпуклой вектограммой.
Вектограммой управляемой системы (1) в точке k, x k называется
множество f k , x, U (k ) значений функций f k , x, u при фиксированных k и
x , когда управление u принимает все возможные значения из U k :
f k , x, U ( k )
u U k
f k , x, u .
В общем случае дискретных систем необходимые условия экстремума не
совпадают с дискретным принципом максимума. По сравнению с приведенным
утверждением в них условие (6) заменяется условием:
q
i 1
u
H k , k 1 , x * k , u * k
ui
i
ui* k 0 ,
k 0,1, , N 1,
для всех u U k , т.е. гамильтониан достигает в точке u * k либо наибольшего
значения на множестве U k , либо u * k является стационарной точкой
(локальным минимумом или максимумом, седловой точкой).
9.
АЛГОРИТМ ПРИМЕНЕНИЯ ДИСКРЕТНОГО ПРИНЦИПАМАКСИМУМА
1. Составить гамильтониан
n
H k , , x, u i f i k , x, u f
0
k , x, u .
i 1
2. Найти структуру оптимального управления из условия максимума
гамильтониана по управлению:
H k , k 1 , x * k , u * k max H k , k 1 , x * k , u .
u U k
3. Составить систему канонических уравнений с заданными в задаче условиями:
x *j k 1 f j k , x * k , u * k ,
x *j 0 x 0 j ,
H k , k 1 , x * k , u * k
j k
,
xj
Гi x N 0,
j 1, , n,
j 1, , n,
k 0,1, , N 1,
k 1, , N 1,
(12)
i 1, , l .
4. Из условия трансверсальности (8) или их следствий (9), (10) в частных
случаях постановки задачи определить недостающие краевые условия для
уравнений системы (12).
5. Решить полученную краевую задачу. В итоге определяется пара
x , u на которой может достигаться минимум функционала (4).
10.
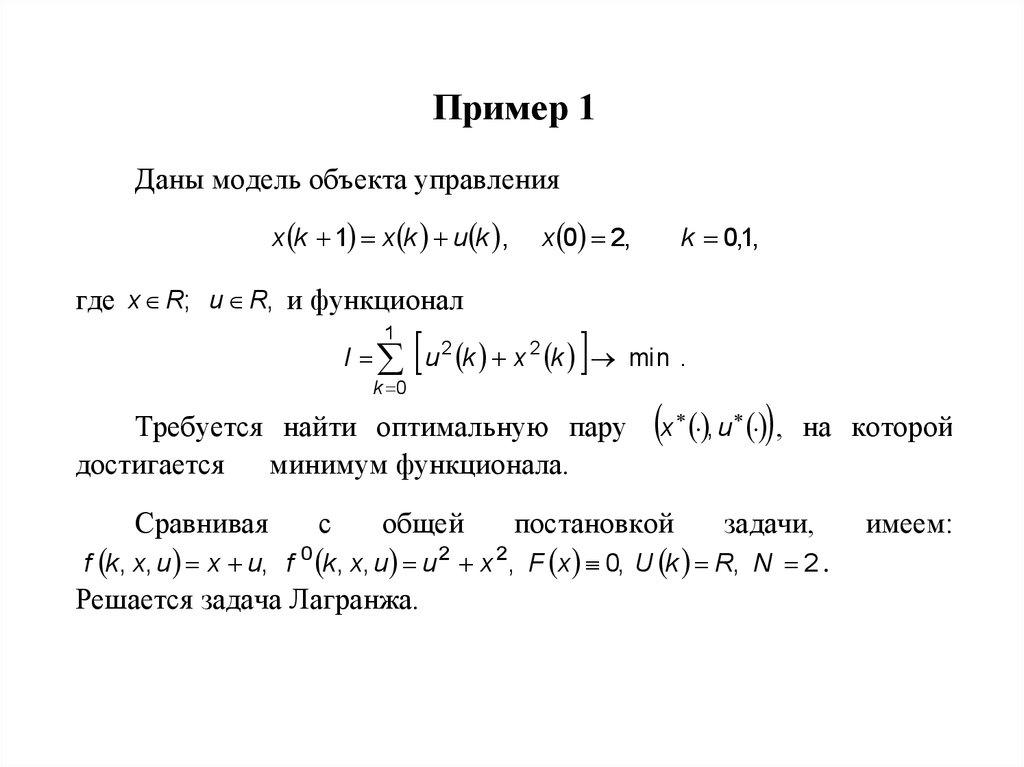
Пример 1Даны модель объекта управления
x k 1 x k u k ,
x 0 2,
k 0,1,
где x R; u R, и функционал
1
I u 2 k x 2 k min .
k 0
Требуется найти оптимальную пару
достигается
минимум функционала.
Сравнивая
f k , x, u x u, f
с
0
общей
x , u ,
постановкой
задачи,
k , x, u u 2 x 2, F x 0, U k R,
Решается задача Лагранжа.
на которой
N 2.
имеем:
11.
1. Составляем гамильтонианH k , , x, u x u u 2 x 2 .
2. Находим максимум гамильтониана по управлению. Так как
ограничения на управление отсутствуют, можно применить необходимые
условия безусловного экстремума (11):
H k , k 1 , x k , u k
k 1 2u k 0 .
u
k 1
. Найденное управление обеспечивает максимум
2
функции H k , k 1 , x k , u по управлению, так как удовлетворяются
достаточные условия экстремума:
Отсюда u * k
2 H k , k 1 , x k , u k
u
2
2 0.
12.
3, 4. С учетом (10) составляем краевую задачу (12):k 1
x k 1 x k
,
2
*
*
k k 1 2x * k ,
x * 0 2,
2 0 .
5. Решение краевой задачи:
x* 0 2, u* 0 1,
x* 1 1, u* 1 0,
1 2,
x * 2 1, 2 0
дает искомую пару: оптимальную траекторию x 2, 1, 1 и
оптимальное управление u 1, 0 .
13.
Пример 2Даны модель объекта управления
x1 k 1 x1 k u k ,
x 2 k 1 2x1 k x 2 k ,
k 0,1,
с начальными условиями x1 0 2, x2 0 1, и функционал
1 1
I u 2 k x12 k x 22 k min .
2 k 0
Требуется найти оптимальное программное управление u и
соответствующую ему траекторию x .
Здесь x x1, x2 T R 2 , на управление ограничений не наложено,
1 2 2 2
u x1 x2 , F x 0, N 2,
2
f1 k , x, u x1 u, f 2 k , x, u 2 x1 x2 ,
f 0 k , x, u
правый конец траектории свободен. Решается задача Лагранжа.
14.
1. Составляем гамильтониан1 2
H k , , x, u 1 x1 u 2 2 x1 x2 u x12 x22 .
2
2. Находим максимум гамильтониана по управлению:
H k , k 1 , x k , u k
u
1 k 1 u k 0.
Отсюда u * k 1 k 1 . При этом
2 H k , k 1 , x k , u k
u
2
1 0.
15.
3, 4. С учетом (10) составляем краевую задачу (12):x1* k 1 x1* k 1 k 1 ,
x2* k 1 2 x1* k x2* k ,
x1* 0 2,
x2* 0 1,
1 k 1 k 1 2 2 k 1 x1* k ,
2 k 2 k 1 x2* k ,
k 0,1,
k 0,1,
1 2 0,
2 2 0,
k 1,
k 1.
5. Решение краевой задачи:
x1* 0 2, x2* 0 1, u * 0 1, x1* 1 1, x2* 1 5, u * 1 0,
1 1 1, 2 1 5;
x1* 2 1, x2* 2 7, 1 2 0, 2 2 0
дает искомую пару: оптимальную траекторию
x1* 2, 1, 1 , x2* 1, 5, 7 и оптимальное управление u 1, 0 .
16.
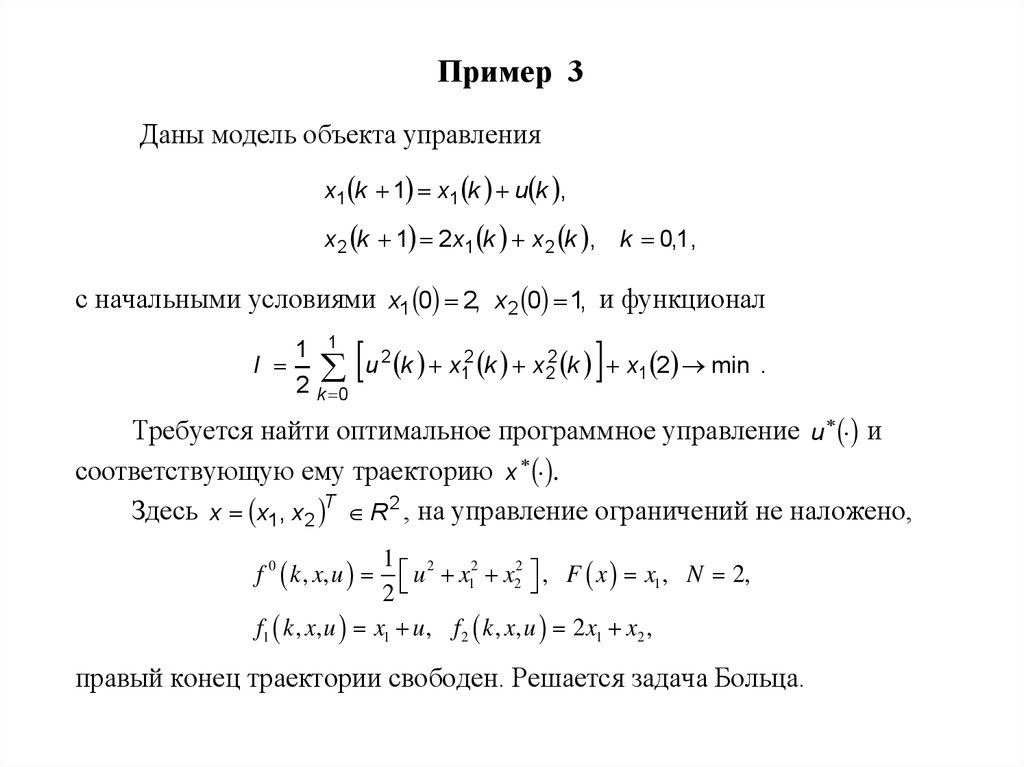
Пример 3Даны модель объекта управления
x1 k 1 x1 k u k ,
x 2 k 1 2x1 k x 2 k , k 0,1,
с начальными условиями x1 0 2, x2 0 1, и функционал
1 1
I u 2 k x12 k x 22 k x1 2 min .
2 k 0
Требуется найти оптимальное программное управление u и
соответствующую ему траекторию x .
Здесь x x1, x2 T R 2 , на управление ограничений не наложено,
1 2 2 2
u x1 x2 , F x x1 , N 2,
2
f1 k , x, u x1 u, f 2 k , x, u 2 x1 x2 ,
f 0 k , x, u
правый конец траектории свободен. Решается задача Больца.
17.
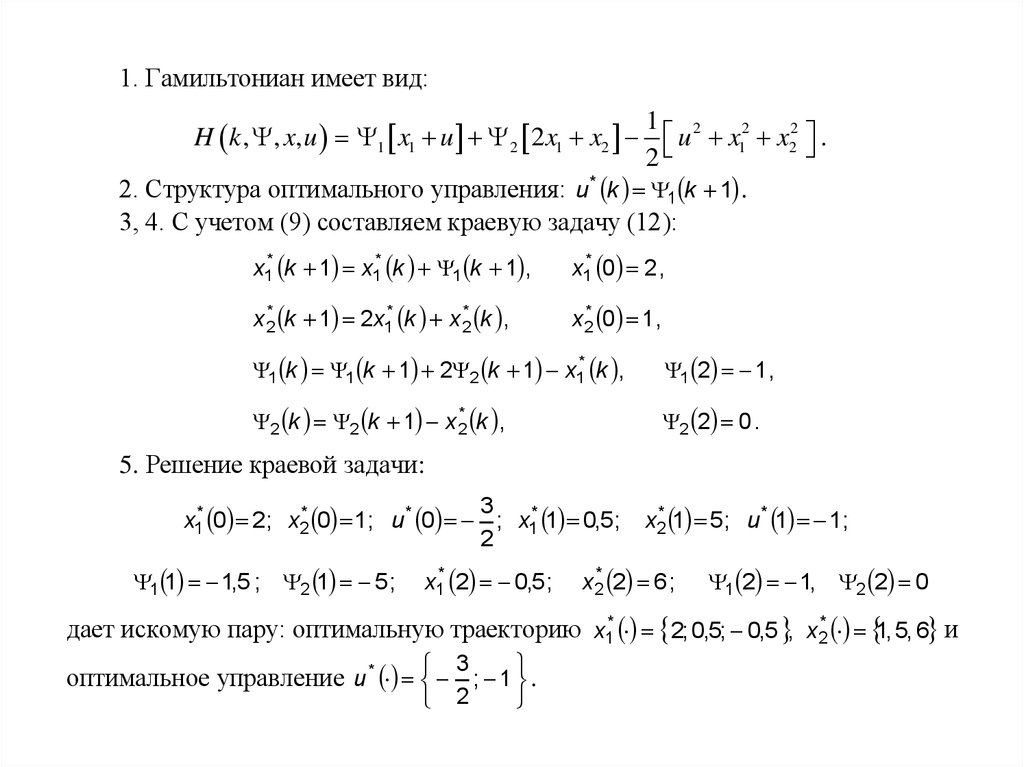
1. Гамильтониан имеет вид:1
H k , , x, u 1 x1 u 2 2 x1 x2 u 2 x12 x22 .
2
2. Структура оптимального управления: u * k 1 k 1 .
3, 4. С учетом (9) составляем краевую задачу (12):
x1* k 1 x1* k 1 k 1 ,
x1* 0 2 ,
x 2* k 1 2x1* k x 2* k ,
x 2* 0 1 ,
1 k 1 k 1 2 2 k 1 x1* k ,
1 2 1 ,
2 k 2 k 1 x 2* k ,
2 2 0 .
5. Решение краевой задачи:
x1* 0 2 ; x2* 0 1; u* 0
1 1 1,5 ; 2 1 5 ;
3
; x1* 1 0,5 ;
2
x1* 2 0,5 ;
x2* 1 5 ; u* 1 1;
x2* 2 6 ;
1 2 1, 2 2 0
дает искомую пару: оптимальную траекторию x1* 2; 0,5; 0,5 , x2* 1, 5, 6 и
3
2
оптимальное управление u * ; 1 .
18.
Пример 4Даны модель объекта управления
x1 k 1 x1 k u k ,
x2 (k 1) 2x1(k ) x2 (k ),
u 1,
k 0,1 ,
с начальными условиями x1 0 2, x2 0 1, и функционал
I x1 2 x2 2 min .
Требуется найти оптимальное программное управление u и
соответствующую ему траекторию x .
Здесь x x1, x2 T R 2 , управление входит в правую часть
разностного уравнения линейно и ограничено по модулю:
u 1, u U k 1, 1 , f 0 k , x, u 0,
F x x1 x2, N 2, f1 k , x, u x1 u, f 2 k , x, u 2x1 x2,
правый конец траектории свободен. Решается задача Майера.
19.
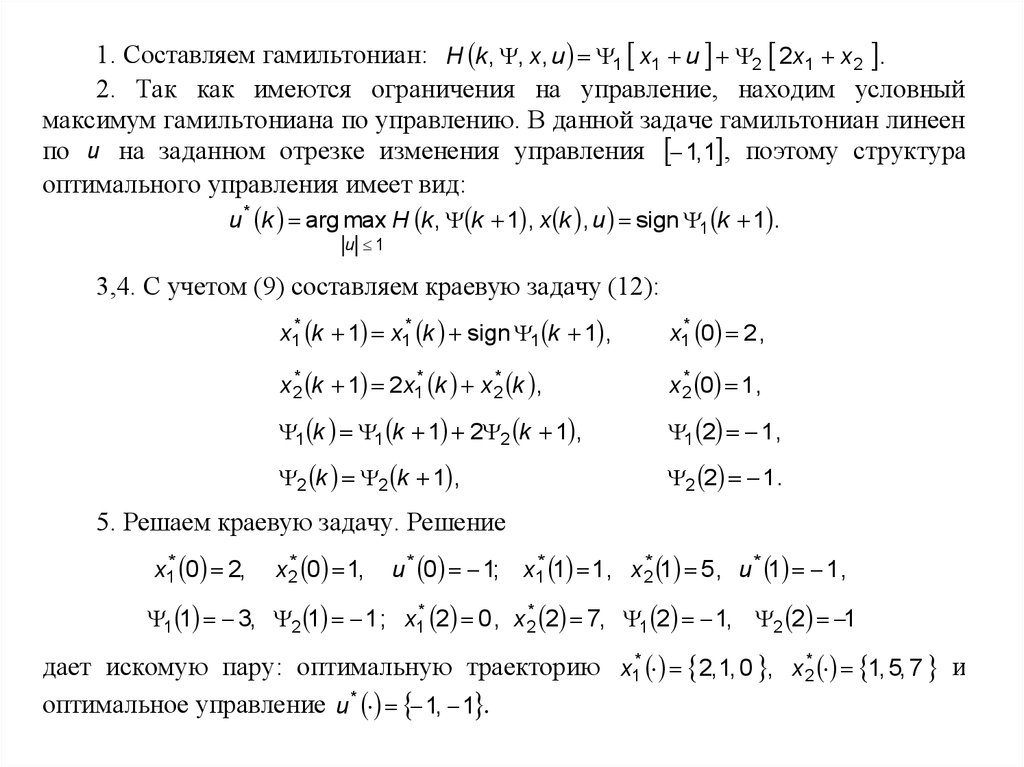
1. Составляем гамильтониан: H k , , x, u 1 x1 u 2 2x1 x2 .2. Так как имеются ограничения на управление, находим условный
максимум гамильтониана по управлению. В данной задаче гамильтониан линеен
по u на заданном отрезке изменения управления 1, 1 , поэтому структура
оптимального управления имеет вид:
u * k arg max H k , k 1 , x k , u sign 1 k 1 .
u 1
3,4. С учетом (9) составляем краевую задачу (12):
x1* k 1 x1* k sign 1 k 1 ,
x1* 0 2 ,
x 2* k 1 2x1* k x 2* k ,
x 2* 0 1 ,
1 k 1 k 1 2 2 k 1 ,
1 2 1 ,
2 k 2 k 1 ,
2 2 1 .
5. Решаем краевую задачу. Решение
x1* 0 2,
x2* 0 1,
u * 0 1;
x1* 1 1, x2* 1 5 , u * 1 1,
1 1 3, 2 1 1; x1* 2 0 , x2* 2 7, 1 2 1, 2 2 1
дает искомую пару: оптимальную траекторию x1* 2, 1, 0 , x2* 1, 5, 7 и
оптимальное управление u * 1, 1 .
20.
Пример 5Даны модель объекта управления с начальными условиями
x1 k 1 x1 k u k ,
x1 0 3, x2 0 1,
x2 k 1 2 x1 k x2 k ,
u 1,
и функционал I
k 0,1,
1 2
x1 2 x 22 2 min .
2
Требуется найти оптимальное программное управление u * и
соответствующую ему траекторию x * .
Здесь x x1, x2 T R 2 , управление входит в правую часть
разностного уравнения линейно и ограничено по модулю:
u 1,
F x
1 2
x1 x 22 ,
2
u U k 1, 1 ,
N 2,
f
0
k , x, u 0 ,
f1 k , x, u x1 u,
f 2 k , x, u 2x1 x 2 ,
правый конец траектории свободен. Решается задача Майера.
21.
1. Составляем гамильтониан:H k , , x, u 1 x1 u 2 2x1 x2 .
2. Находим структуру оптимального управления:
u* k arg max H k , k 1 , x k , u sign 1 k 1 .
u 1
3, 4. С учетом (9) составляем краевую задачу (12):
x1* k 1 x1* k sign 1 k 1 ,
x1* 0 3,
x2* k 1 2 x1* k x2* k ,
x2* 0 1,
1 k 1 k 1 2 2 k 1 ,
1 2 x1* 2 ,
2 k 2 k 1 ,
2 2 x2* 2 .
22.
5. Решаем краевую задачу. Вычисляем x1* 2 , x2* 2 :x1* 2 x1* 0 sign x1* 2 2 x2* 2 sign x1* 2 ,
x2* 2 4 x1* 0 x2* 0 2sign x1* 2 2 x2* 2 .
Подставляя начальные условия, заключаем, что x1* 2 0 и x 2* 2 0 .
Отсюда получаем
u* 0 sign x1* 2 2 x2* 2 1, u * 1 sign x1* 2 1,
x1* 0 3, x2* 0 1, u* 0 1; x1* 1 2, x2* 1 7, u * 1 1,
1 1 23, 2 1 11;
x1* 2 1,
x2* 2 11, 1 2 1, 2 2 11 .
Искомая пара: оптимальная траектория x1* 3, 2, 1 , x2* 1, 7, 11 и
оптимальное управление u * 1, 1 .