

















")
")


















 physics
physicsSimilar presentations:







")


Кинематика материальной точки. (Тема 1)
1. ЮЖНЫЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ ИНЖЕНЕРНО-ТЕХНОЛОГИЧЕСКАЯ АКАДЕМИЯ, ТАГАНРОГ
ФИЗИКАОБЩИЙ КУРС
2. ЛИТЕРАТУРА
1. Савельев И.В. Курс общей физики.2. Уколов А.С. Лекции по общему курсу
физики ч. 1-5. Заичкин Н.Н. ч. 6-7.
3. Трофимова Т.И. Курс физики.
4. Учебно-методическое пособие для
выполнения индивидуального задания
по дисциплине «Физика». №4956-1,2,3.
5. Сивухин Д.В.; Матвеев А.Н.;
Фейнман Р.Ф.
3.
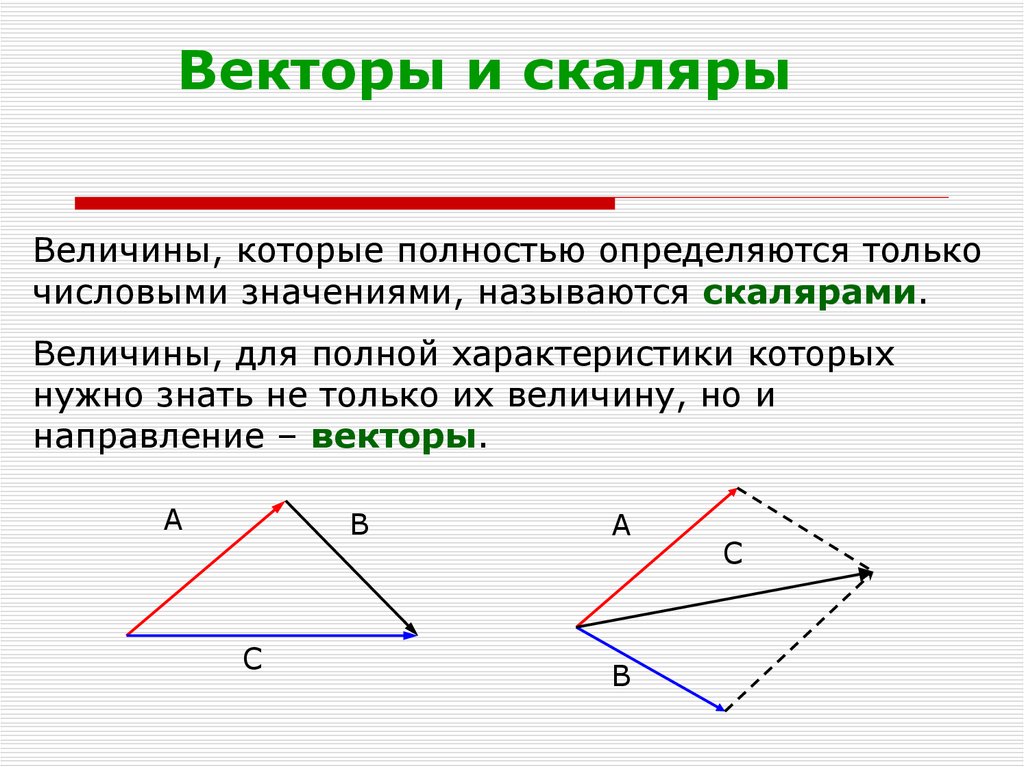
Векторы и скалярыВеличины, которые полностью определяются только
числовыми значениями, называются скалярами.
Величины, для полной характеристики которых
нужно знать не только их величину, но и
направление – векторы.
А
В
С
А
В
С
4.
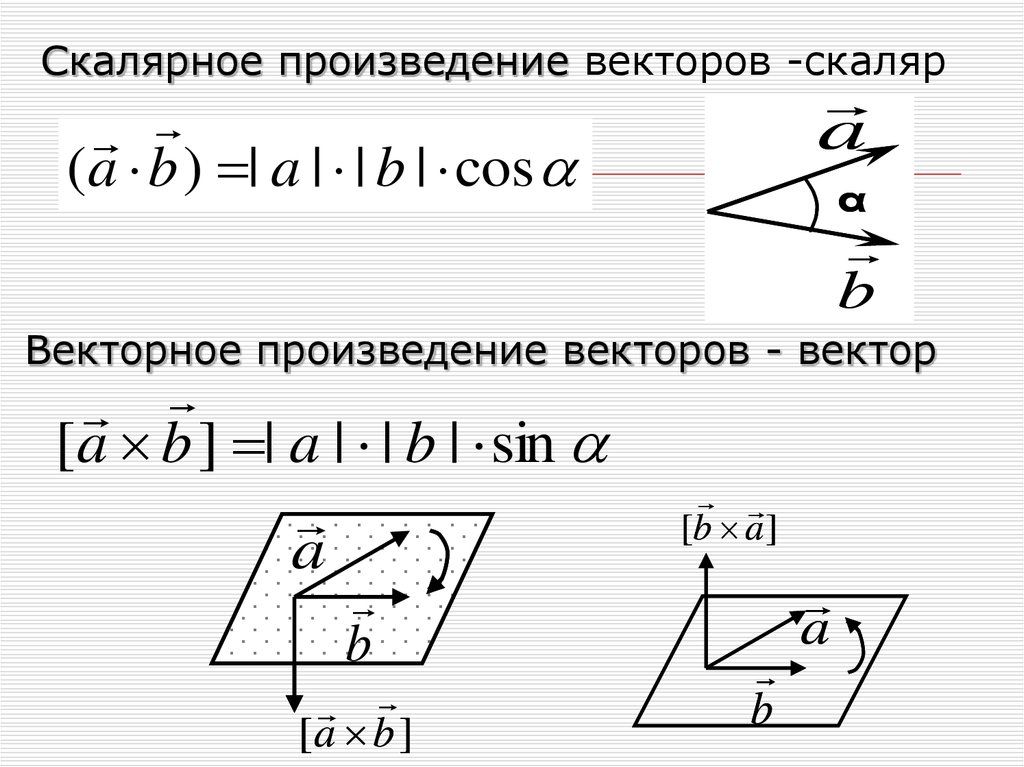
Скалярное произведение векторов -скалярa
(a b ) | a | | b | cos
α
b
Векторное произведение векторов - вектор
[a b ] | a | | b | sin
a
b
[a b ]
[b a ]
b
a
5. ТЕМА I. КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
§1. Основные понятия кинематики6. 1.МЕХАНИЧЕСКАЯ СИСТЕМА
Механической системой называется любойобъект (набор объектов), механическим
движением которого мы интересуемся.
7. 2. МАТЕРИАЛЬНАЯ ТОЧКА
Тело, размерами которого в условиях даннойзадачи можно пренебречь, называется
материальной точкой (частицей).
8. 3. АБСОЛЮТНО ТВЕРДОЕ ТЕЛО
Тело называетсяабсолютно твердым,
если его деформациями в условиях данной задачи можно
пренебречь.
Система частиц, расстояния между которыми не изменяются.
9. 4. РАДИУС-ВЕКТОР
x r cos ;y r cos ;
z r cos .
cos2 cos2 cos2 1.
10. 5. СИСТЕМА ОТСЧЕТА
Система отсчетанеобходима для
фиксации положения
объектов
в пространстве
и определения
изменения
положения объектов
с течением времени,
то есть описания
механического
движения.
11. 6. ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ
Поступательнымназывается такое
движение,
при котором любая
прямая, связанная с
движущимся телом,
остается при
движении
параллельной
самой себе.
12. 7. ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ
Вращательнымназывается движение,
при котором все точки
тела движутся по
окружностям,
центры которых лежат
на одной и той же
прямой,
называемой осью
вращения.
13. 8. ТРАЕКТОРИЯ. ПУТЬ. ПЕРЕМЕЩЕНИЕ
Траектория – линия,описываемая частицей
при движении.
Путь - длина траектории.
Перемещение –
направленный отрезок,
соединяющий начальную
точку траектории с
конечной.
14. § 2. СКОРОСТЬ
15. СРЕДНЯЯ СКОРОСТЬ. СРЕДНЕПУТЕВАЯ СКОРОСТЬ
1. СРЕДНЯЯ СКОРОСТЬ.СРЕДНЕПУТЕВАЯ СКОРОСТЬ
S
Vc ;
t
Vc
Vc
l
;
t
l S Vc
Vc
S
t
;
Средняя скорость – это
скорость такого равномерного
движения, при котором
за то же время совершается
то же перемещение
Vc
(пройден тот же путь).
16. 2. МГНОВЕННАЯ СКОРОСТЬ
SV lim Vc lim
t 0
t 0
t
S r t r0 r
r
dr
V lim
r
t 0 t
dt
Мгновенная скорость – это
производная радиус-вектора.
17. 3. КОМПОНЕНТЫ И ПРОЕКЦИИ СКОРОСТИ
V Vx Vy Vz ;V Vx i Vy j Vz k ;
dx
Vx
x;
dt
dy
Vy
y;
dt
dz
Vz
z.
dt
Проекция скорости – это
производная координаты.
18. 4. МОДУЛЬ СКОРОСТИ
l dlV lim l ;
t 0 t
dt
Модуль скорости – это
производная пути.
Модуль скорости
можно по теореме Пифагора выразить через проекции:
V V V V V
2
x
2
y
2
z
x y z .
2
2
2
19. 5. ЗАКОН ДВИЖЕНИЯ
Закон движения – это уравнение,определяющее положение тела в
пространстве в любой момент времени.
r (t ) r0 S (t );
t
dS Vdt S Vdt.
0
x(t ) x0 S x (t ),
y (t ) y0 S y (t ),
z (t ) z0 S z (t ).
t
dS x Vx dt S x Vx dt...
0
20. 6. ПРЯМОЛИНЕЙНОЕ РАВНОМЕРНОЕ ДВИЖЕНИЕ
Прямолинейное равномерноедвижение – это такое движение,
при котором скорость тела
постоянна по величине
и направлению:
x
V const.
S x Vx t;
x(t ) x0 S x (t );
x(t ) x0 Vx t.
21. 7. ГРАФИКИ РАВНОМЕРНОГО ДВИЖЕНИЯ (I)
22. 7. ГРАФИКИ РАВНОМЕРНОГО ДВИЖЕНИЯ (II)
Кусочно-непрерывноедвижение
x2 x1
Vx
tg .
t2 t1
23. 8. ОТНОСИТЕЛЬНОСТЬ ДВИЖЕНИЯ
V V1 V2Скорость тела относительно неподвижной системы
отсчёта равна сумме скорости тела относительно
движущейся системы отсчёта и скорости движущейся
системы относительно неподвижной.
Vx V1x V2 x
Vy V1 y V2 y
Vz V1z V2 z
24. §3. УСКОРЕНИЕ
25. УСКОРЕНИЕ КАК ПРОИЗВОДНАЯ
1. УСКОРЕНИЕ КАКПРОИЗВОДНАЯ
V dV
d dr d 2 r
a lim
V 2 r
t 0
t
dt
dt dt dt
Vx dVx
d drx d 2 rx
ax lim
Vx
2 rx x
t 0
t
dt
dt dt dt
dV
d 2r
a a
V 2 r
dt
dt
a ax2 a y2 az2 Vx2 Vy2 Vz2 ;
a rx2 ry2 rz2 x 2 y 2 z 2 .
ax Vx rx x;
ay Vy ry y;
az Vz rz z.
26. 2. ЕСТЕСТВЕННЫЕ КОМПОНЕНТЫ УСКОРЕНИЯ
V V ;n ;
n 1;
V V Vn ;
V V Vn n;
V
V
Vn
a lim
lim
lim
n
t 0
t 0
t
t t 0 t
V
Vn
a lim
n lim
a an ;
t 0
t 0
t
t
d
dV
d
a V
V
a an ;
dt
dt
dt
27. 3. ТАНГЕНЦИАЛЬНОЕ УСКОРЕНИЕ
Тангенциальное ускорение характеризуетизменение скорости по величине.
a 0;
a a ;
dV
a
V;
dt
a 0;
dV
a
V ;
dt
28. 4. НОРМАЛЬНОЕ УСКОРЕНИЕ
Нормальное ускорение характеризуетизменение скорости по направлению.
V const V 2V sin 2 ;
2V
an a lim sin
;
t 0
2
t
t 0 0 sin 2 2
an lim V
V lim
V ;
t 0
t 0
t
t
V V an V ;
29. 5. КРИВИЗНА ТРАЕКТОРИИ
Кривизна траекторииколичественная характеристика
кривой линии.
1
d
C lim
lim
;
S 0 S
R S 0 S
dS
S
an lim V
V lim
t 0
t 0
t
S t
S V
an V lim
lim
.
S 0
S t 0 t R
2
30. 6. ПОЛНОЕ УСКОРЕНИЕ
мa 1 2 ;
с
a a an V V ;
an V n V
n;
a a a V V V V
2
2
n
2
2
2
2
4
2
R .
31. 7. РАВНОПЕРЕМЕННОЕ ДВИЖЕНИЕ
Vx V0 x axt;2
axt
S x V0 xt
;
2
Vx2 V02x 2ax S x .
32. 8. ГРАФИКИ РАВНОПЕРЕМЕННОГО ДВИЖЕНИЯ
Vx V0 at;axt 2
S x V0 xt
;
2
ax 2
V0 x
Sx t 2
t ;
2
ax
ax 2
V0 x V02x V02x
Sx t 2
t 2 2 ;
2
ax
ax ax
ax 2
V0 x V02x V02x
Sx t 2
t 2
;
2
ax
a x 2a x
2
ax V0 x V02x
Sx t
.
2
a x 2a x
Vx V0 at;
33. 9. СВОБОДНОЕ ПАДЕНИЕ
V V0 at ;Vx V0 cos ;
Vy V0 sin gt ;
x x0 V0 cos t;
gt 2
y y0 V0 sin t
.
2
34. 10. ДАЛЬНОСТЬ И ВЫСОТА ПОЛЕТА
tподV0 sin
;
g
V02 sin 2
H y (tпод )
.
2g
tпол
2V0 sin
;
g
V02 sin 2
L x(tпол )
.
g
35. §4. КИНЕМАТИКА ДВИЖЕНИЯ ПО ОКРУЖНОСТИ
36. 1. ПЕРИОД И ЧАСТОТА ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
dt2 R
T
; T
;
dN
V
dN
1
;
dt
T
T 1c; 1c
1
1Гц;
37. 2. РАВНОМЕРНОЕ ВРАЩЕНИЕ
2;
t
T
2 ;
рад
1 ;
с
38. 3. РАВНОПЕРЕМЕННОЕ ВРАЩЕНИЕ
d;
dt
d z
z z
;
dt
z ;
рад
1 2 .
с
39. 4. УГЛОВАЯ И ЛИНЕЙНАЯ СКОРОСТИ
dl dV
;
dt
dt
r sin V r sin ;
r r sin ;
V r
V r ;
40. 5. УГЛОВОЕ И ЛИНЕЙНОЕ УСКОРЕНИЯ
an V R 2 R;dV d
a
z R
dt dt
d z
a R
R z ;
dt
d
d
r
d
V
d
a
r a r r V ;
dt dt
dt dt
2
a r ;
an V r r r ;
41.
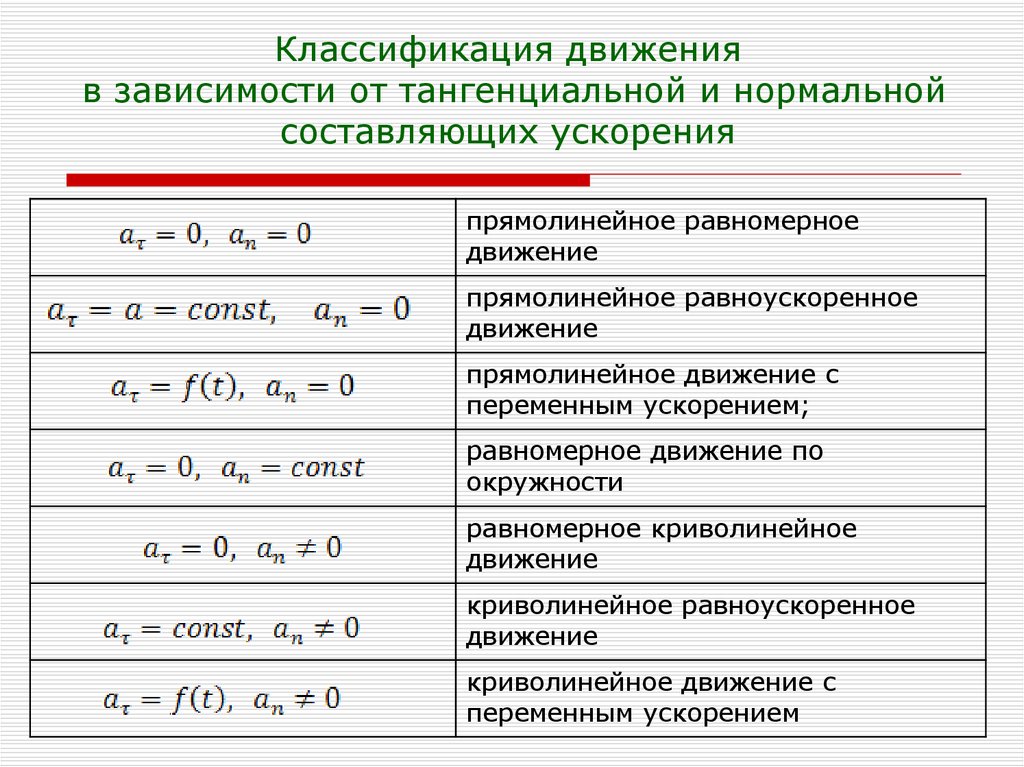
Классификация движенияв зависимости от тангенциальной и нормальной
составляющих ускорения
прямолинейное равномерное
движение
прямолинейное равноускоренное
движение
прямолинейное движение с
переменным ускорением;
равномерное движение по
окружности
равномерное криволинейное
движение
криволинейное равноускоренное
движение
криволинейное движение с
переменным ускорением
42.
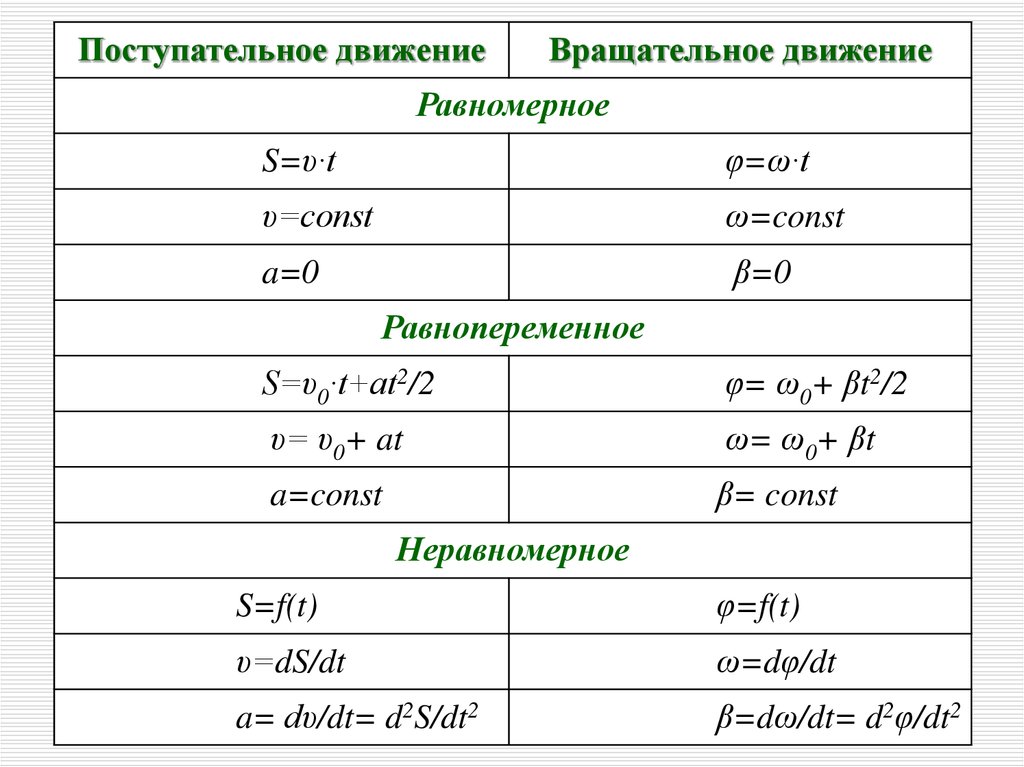
Поступательное движениеВращательное движение
Равномерное
S=υ·t
φ=ω·t
υ=const
ω=const
a=0
β=0
Равнопеременное
S=υ0·t+at2/2
φ= ω0+ βt2/2
υ= υ0+ at
ω= ω0+ βt
a=const
β= const
Неравномерное
S=f(t)
φ=f(t)
υ=dS/dt
ω=dφ/dt
a= dυ/dt= d2S/dt2
β=dω/dt= d2φ/dt2