










































































 mathematics
mathematicsSimilar presentations:










Векторная алгебра
1.
Векторная алгебраТермин вектор
(от лат. Vector -“несущий “) впервые
появился в 1845 г. у ирландского
математика Уильяма Гамильтона
Уи́льям Ро́уэн Га́мильтон
1805 — 1865
выдающийся ирландский математик и
физик XIX века.
2.
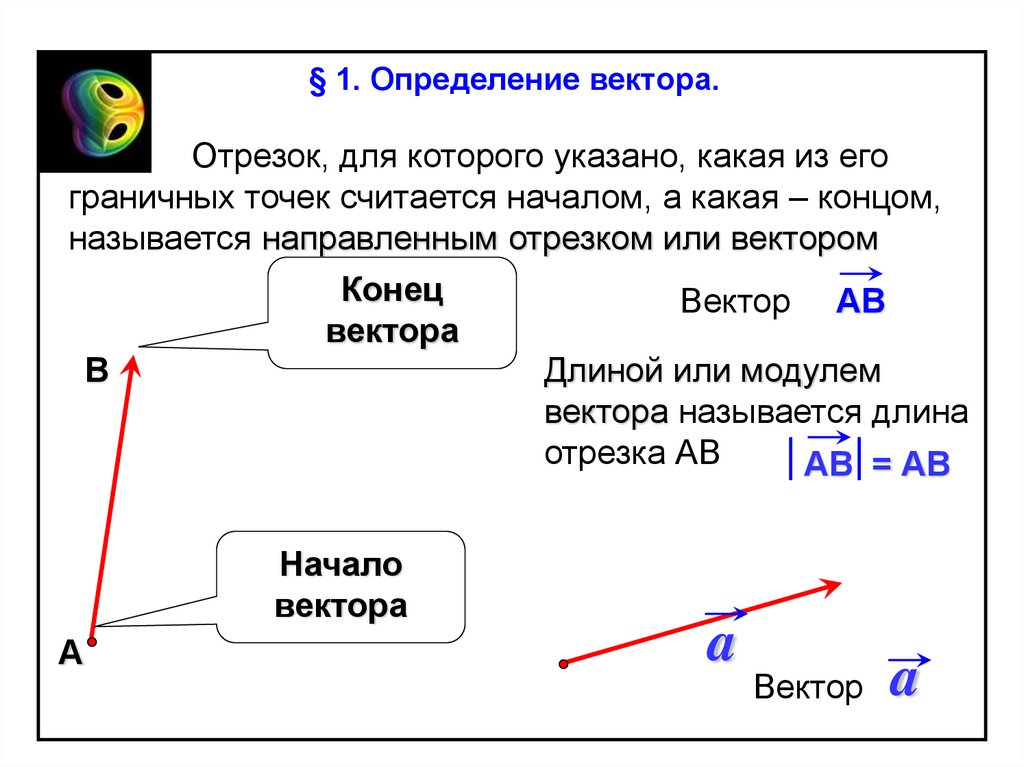
§ 1. Определение вектора.Отрезок, для которого указано, какая из его
граничных точек считается началом, а какая – концом,
называется направленным отрезком или вектором
Конец
вектора
В
АВ
Длиной или модулем
вектора называется длина
отрезка АВ
АВ = АВ
Начало
вектора
А
Вектор
a
Вектор
a
3.
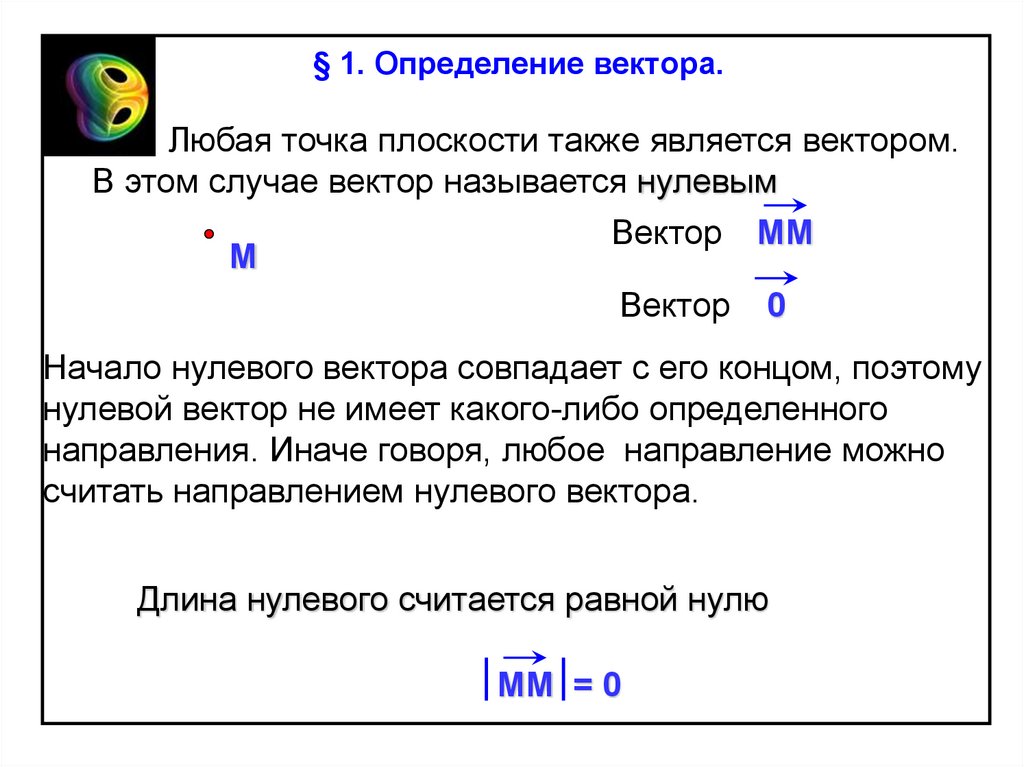
§ 1. Определение вектора.Любая точка плоскости также является вектором.
В этом случае вектор называется нулевым
Вектор MM
M
Вектор 0
Начало нулевого вектора совпадает с его концом, поэтому
нулевой вектор не имеет какого-либо определенного
направления. Иначе говоря, любое направление можно
считать направлением нулевого вектора.
Длина нулевого считается равной нулю
MM = 0
4.
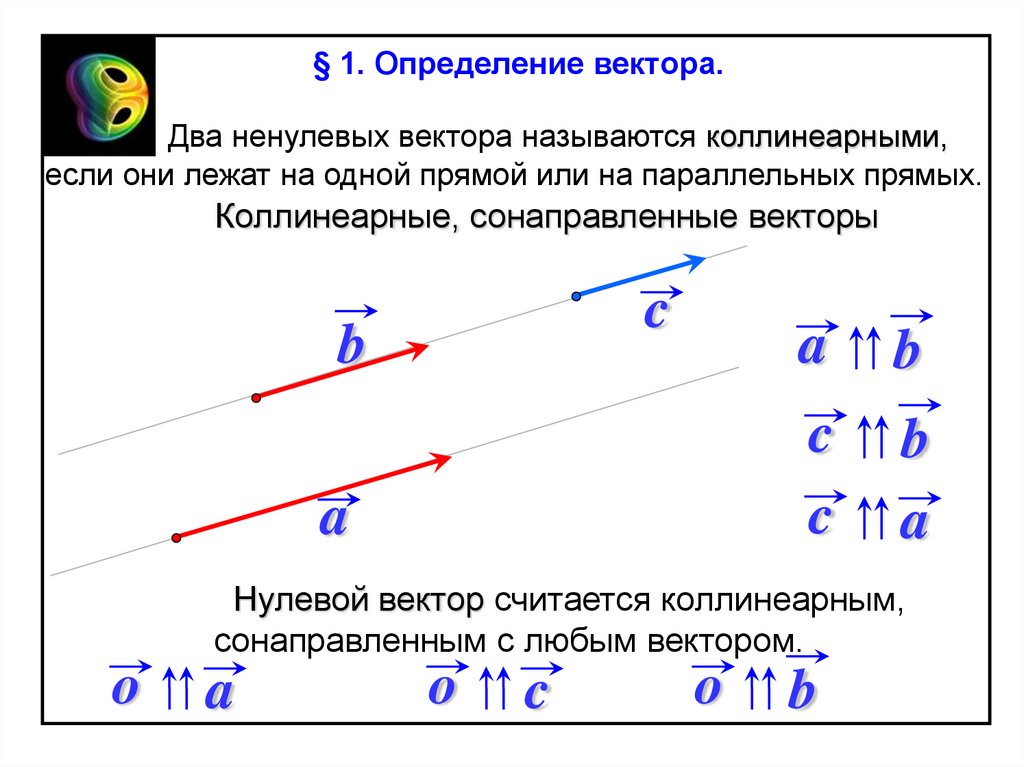
§ 1. Определение вектора.Два ненулевых вектора называются коллинеарными,
если они лежат на одной прямой или на параллельных прямых.
Коллинеарные, сонаправленные векторы
c
b
a
a
b
c
c
b
a
Нулевой вектор считается коллинеарным,
сонаправленным с любым вектором.
o
a
o
c
o
b
5.
§ 1. Определение вектора.Два ненулевых вектора называются
коллинеарными, если они лежат на одной прямой или на
параллельных прямых.
Коллинеарные,
противоположно направленные векторы
b
a
c
a
b
c
b
6.
§ 1. Определение вектора.Векторы называются компланарными, если при
откладывании их от одной и той же точки они будут лежать
в одной плоскости.
Другими словами, векторы называются
компланарными, если имеются равные им векторы,
лежащие в одной плоскости.
c
a
Любые два вектора
компланарны.
7.
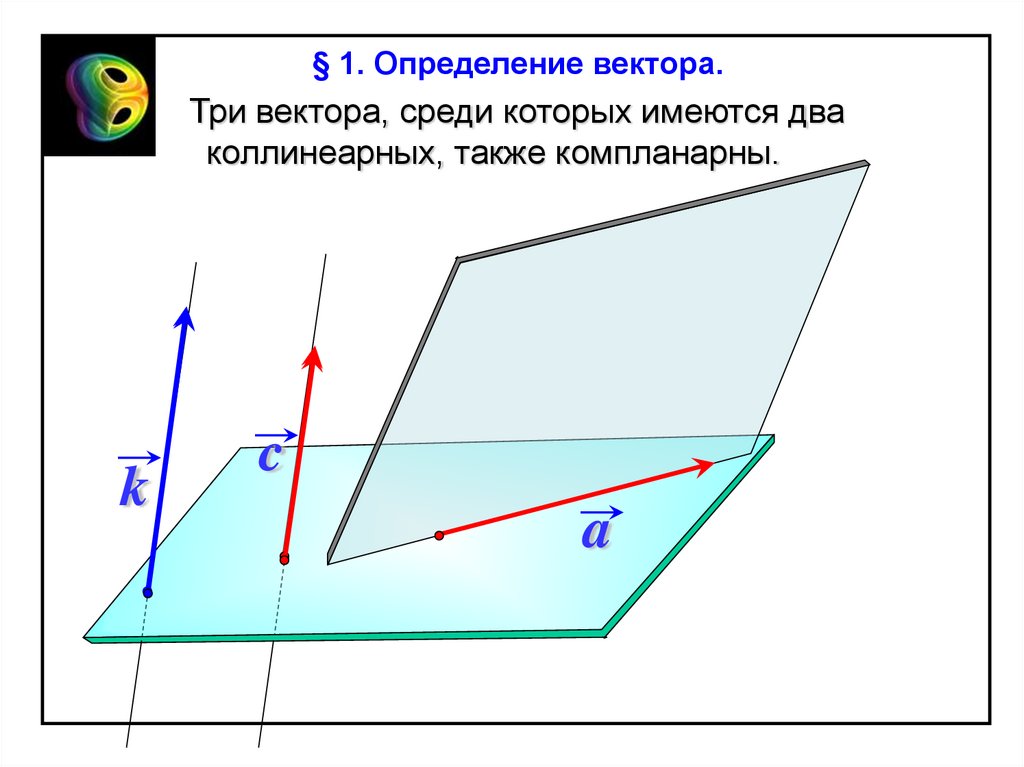
§ 1. Определение вектора.Три вектора, среди которых имеются два
коллинеарных, также компланарны.
k
c
a
8.
§ 1. Определение вектора.Три произвольных вектора могут быть как
компланарными, так и не компланарными.
B1
D
C
Е
В
О
А
9.
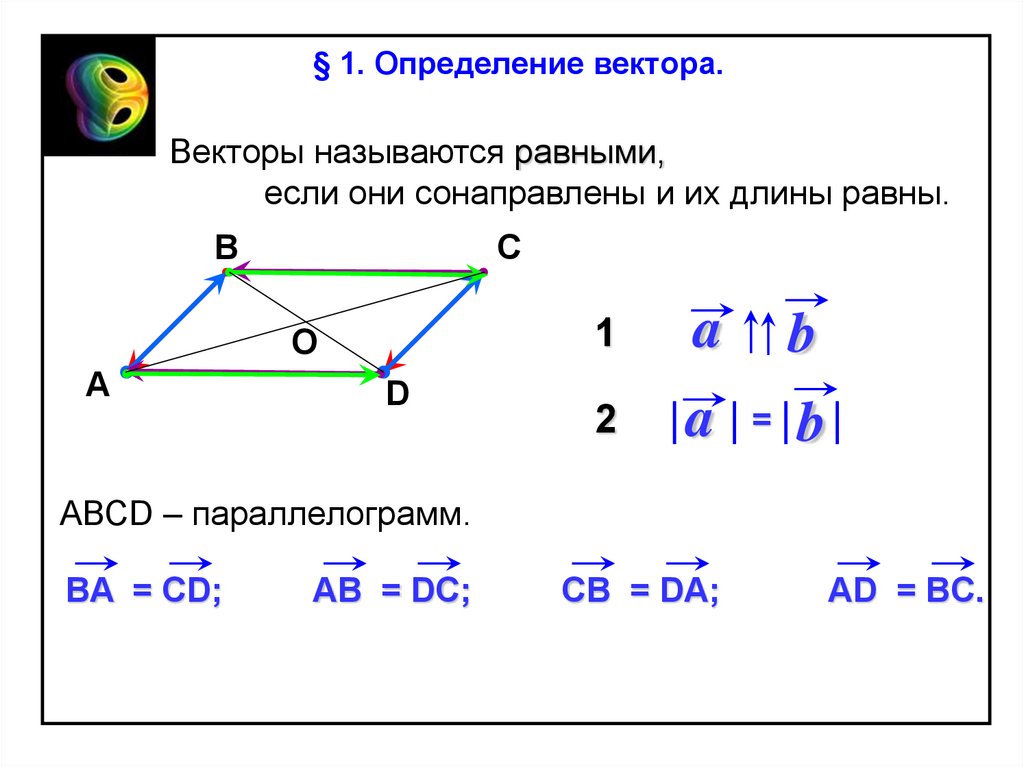
§ 1. Определение вектора.Векторы называются равными,
если они сонаправлены и их длины равны.
В
С
О
А
D
1
a
2
a
b
=
b
АВСD – параллелограмм.
ВA = CD;
AВ = DC;
CВ = DA;
AD = BC.
10.
§ 1. Определение вектора.Векторы называются противоположными,
если они противонаправлены и их длины равны.
В
С
О
А
D
1
a
2
a
АВСD – параллелограмм.
DA = -BC;
AВ = -CD;
b
=
b
11.
§ 1. Определение вектора.Если точка А – начало вектора
вектор
a
a , то говорят, что
отложен от точки А
От любой точки М можно отложить
вектор, равный данному вектору
и притом только один.
ac
А
Вектор
a
отложен от точки А
a
М
a,
a
c
=
c
a=c
12.
§ 1. Определение вектора.Угол между векторами
Углом α между векторами называется
наименьший угол, образуемый векторами при
совмещении их начал.
a
a
b
О
a
b
Угол между векторами
равен a
a b= a
a
и
b
13.
§ 1. Определение вектора.Для коллинеарных векторов
или
Два вектора называются ортогональными,
если угол между ними равен 900.
c
b^c
b
14.
§ 2. Действия над векторами.Сложение векторов. Правило треугольника.
a
С
a+c
А
c
15.
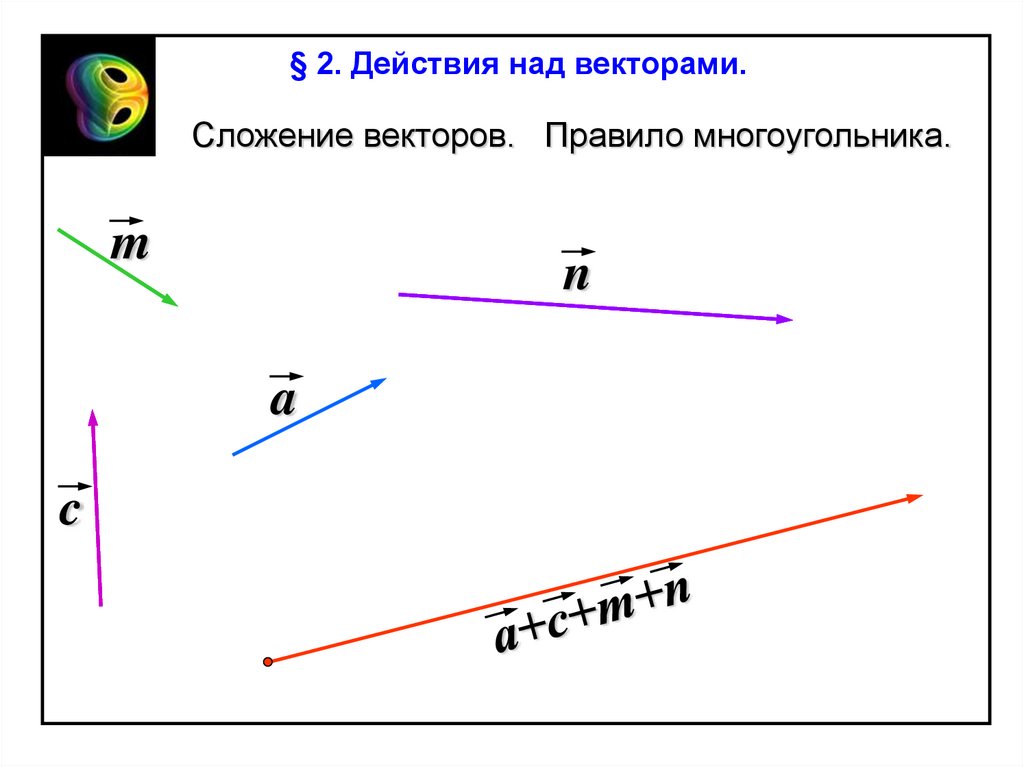
§ 2. Действия над векторами.Сложение векторов. Правило многоугольника.
m
n
a
c
16.
§ 2. Действия над векторами.Сложение векторов. Правило параллелограмма.
a+b
В
b
b
a+b
А
C
a
a
D
17.
§ 2. Действия над векторами.FСложим первые две силы F1 и F2 (аксиома параллелограмма). 1
Количество сил уменьшилось на единицу.
R1, 2 F1 F2
F2
R1, 2
R1, 2,3
R1, 2,3, 4
Сложим полученную равнодействующую R12 со следующей силой F3.
Количество сил вновь уменьшилось на единицу.
R1, 2,3 R1, 2 F2
F3
Повторим эту же операцию со следующей силой F4.
Осталась всего одна сила, эквивалентная исходной системе сил.
R1, 2,3, 4 R1, 2,3 F4
F4
Сложение сил построением параллелограммов можно заменить
построением силового треугольника – выбирается одна из сил или
изображается параллельно самой себе с началом в любой произвольной
точке, все другие силы изображаются параллельными самим себе с
началом, совпадающим с концом предыдущей силы.
Результатом такого сложения является вектор, направленный из начала первой
силы к концу последней из сил.
R F1 F2 F3 F4 ... Fi
18.
§ 2. Действия над векторами.Правило параллелепипеда.
из OAE
OD = OE + ED = (OA + AE) + ED = OA + OB + OC =
D
В1
=a+b+c
С
c
Е
A
В
О
a
b
19.
§ 2. Действия над векторами.Вычитание векторов
b
a
a b a ( b)
b
a b
a
20.
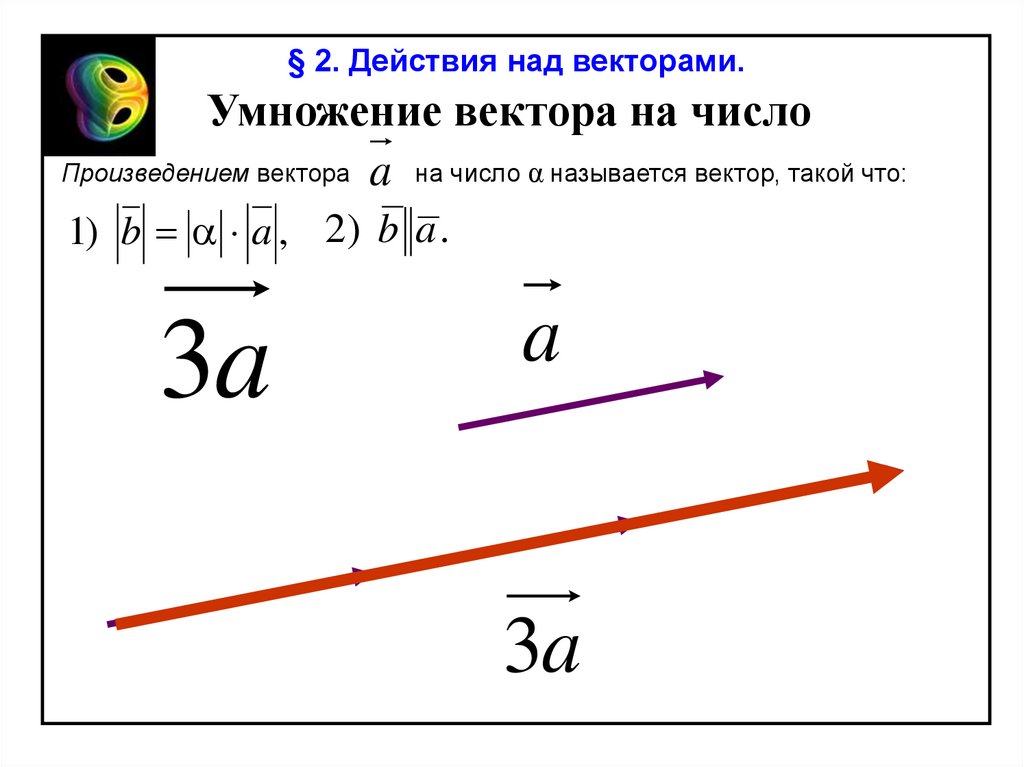
§ 2. Действия над векторами.Умножение вектора на число
Произведением вектора a на число α называется вектор, такой что:
1) b a a , 2) b a .
3a
a
3a
21.
§ 2. Действия над векторами.Умножение вектора на число
Произведением вектора
a
на число α называется вектор, такой что:
1) b a a , 2) b a .
3a
a
3a
22.
§ 2. Действия над векторами.Умножение вектора на число
1
a
2
1
a
2
a
1
a
2
1
a
2
23.
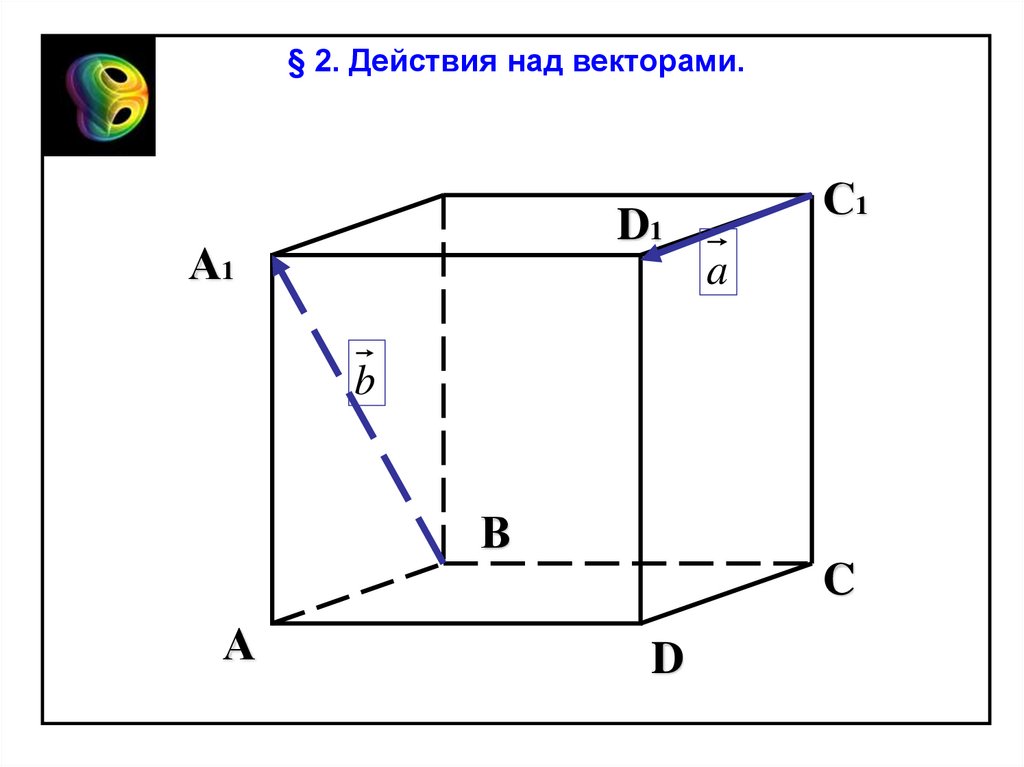
§ 2. Действия над векторами.С1
D1
А1
a
b
В
C
А
D
24.
§ 2. Действия над векторами.а b
А1
В1
С1
D1
a
а b
b
b
В
А
D
C
25.
§ 2. Действия над векторами.b a
a
В1
С1
D1
А1
a
b
b a
В
C
А
26.
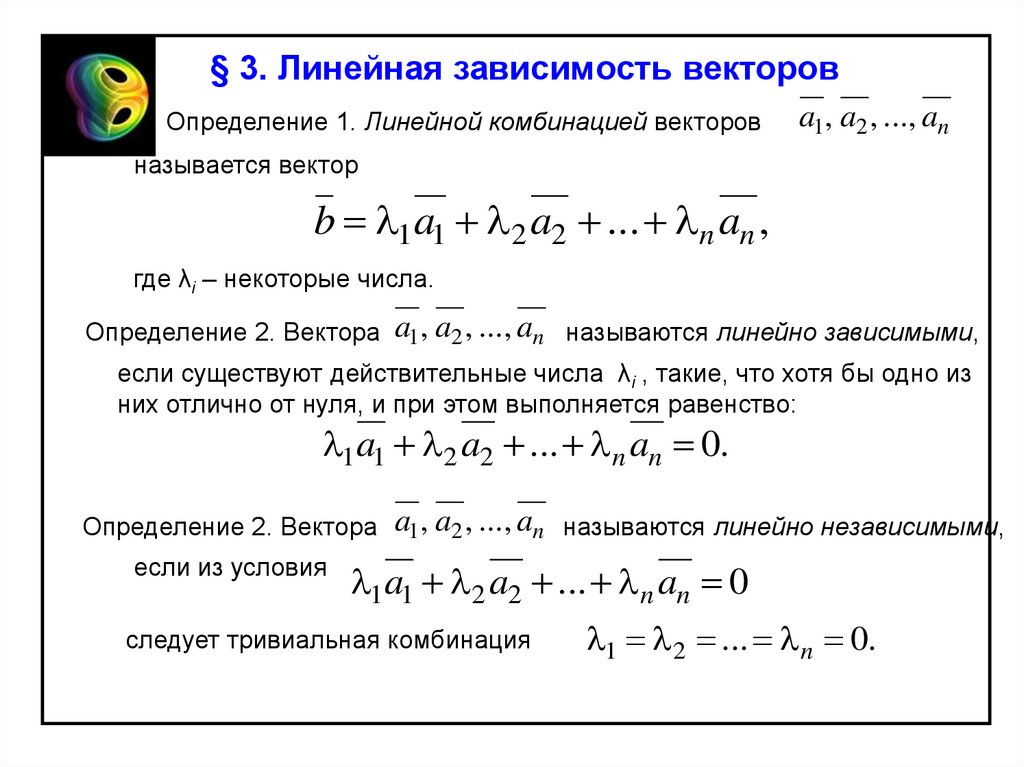
§ 3. Линейная зависимость векторовОпределение 1. Линейной комбинацией векторов
a1, a2 , ..., an
называется вектор
b 1 a1 2 a2 ... n an ,
где λi – некоторые числа.
Определение 2. Вектора
a1, a2 , ..., an называются линейно зависимыми,
если существуют действительные числа λi , такие, что хотя бы одно из
них отлично от нуля, и при этом выполняется равенство:
1 a1 2 a2 ... n an 0.
Определение 2. Вектора
если из условия
a1, a2 , ..., an называются линейно независимыми,
1 a1 2 a2 ... n an 0
следует тривиальная комбинация
1 2 ... n 0.
27.
§ 3. Линейная зависимость векторовa1, a2 , ..., an
Теорема 1. Для линейной зависимости векторов
необходимо и достаточно, чтобы один из них был линейной
комбинацией остальных.
Доказательство.
Необходимость.
Пусть вектора линейно зависимы. Тогда существуют числа λi, не равные
нулю одновременно, такие, что
a a ... a 0.
Пусть λ1 ≠0, тогда
a1
1 1
2 2
n n
2
a2 ... n an , что доказывает необходимость.
1
1
Достаточность.
a1 2 a2 ... n an .
( 1)a1 2 a2 ... n an 0, причем 1 2 ... n 0.
Пусть для определенности
Тогда
Это и есть условие линейной зависимости.
28.
§ 3. Линейная зависимость векторовДля линейно зависимых векторов справедливы теоремы 2–6.
Теорема 2. Один вектор линейно зависим тогда и только тогда, когда он
нулевой.
Теорема 3. Два вектора линейно зависимы тогда и только тогда, когда
они коллинеарны.
Теорема 4. Три вектора линейно зависимы тогда и только тогда, когда
они компланарны.
Доказательство.
Необходимость.
Пусть три вектора a1 , a2 , a3 линейно зависимы. Тогда существуют не
равные одновременно нулю три числа 1 , 2 , 3 , такие, что
1 a1 2 a2 3 a3 0.
Тогда по теореме 1 один из векторов есть линейная комбинация двух
остальных, и, значит, данные три вектора компланарны.
29.
§ 3. Линейная зависимость векторовДостаточность.
Пусть a1 , a2 , a3 компланарны, и пусть вектора
a1 и a2
неколлинеарны.
a1 b1 b1 1 a1
a2 b2 b2 2 a2
a3 b1 b2 1 a1 2 a2
из чего вытекает (вследствие теоремы 1)
линейная зависимость векторов
30.
§ 3. Линейная зависимость векторовТеорема 5. Любые четыре вектора в пространстве линейно
зависимы.
Действительно, можно подобрать, причем единственным образом, такие
числа
1, 2 , 3 , что будет d 1 a 2 b 3 c.
d
с
3 c
b
a
1 a
2 b
Теорема 6. Если среди векторов a1, a2 , ..., an имеется хотя бы один
нулевой вектор, то вектора a1, a2 , ..., an линейно зависимы.
31.
§ 3. Линейная зависимость векторовСвойства линейно независимых векторов:
• Один вектор линейно независим тогда и только
тогда, когда он ненулевой.
• Два вектора линейно независимы тогда и только
тогда, когда они неколлинеарны.
• Три вектора линейно независимы тогда и только
тогда, когда они некомпланарны.
32.
§ 4. Базис. Координаты вектора в базисе.Определение 1. Базисом на прямой называется любой ненулевой
вектор, принадлежащий этой прямой.
g2
g
g1
Определение 2. Базисом на плоскости называется любая пара
линейно независимых векторов, лежащих на этой плоскости.
Определение 3. Базисом в пространстве называется любая тройка
линейно независимых векторов.
g3
g2
g1
Будем обозначать базис в пространстве, составленный из линейно
независимых векторов, как g1 , g 2 , g3 .
33.
§ 4. Базис. Координаты вектора в базисе.Определение 4. Базис называется ортогональным, если
образующие его вектора попарно перпендикулярны.
g3
e3
g2
90
o
g1
e2
o
90
e1
Определение 5. Ортогональный базис называется ортонормированным,
если образующие его вектора имеют единичную длину.
e1 = 1
e2 = 1
e3 = 1
34.
§ 4. Базис. Координаты вектора в базисе.Теорема 1. Любой вектор x в пространстве с базисом g1, g 2 , gможет
3
быть представлен, и причем единственным способом, в виде
x a g1 g2 g3 , где α, β, γ – некоторые числа.
Доказательство. Докажем вначале, что такие числа существуют.
x y z, и в силу коллинеарности z g3.
y q r , и в силу коллинеарности q a g1, r g 2 .
g3
z
y
Следовательно, y a g1 g 2 и
x g
2
x a g1 g 2 g3.
Докажем единственность разложения по данному базису.
q
g1
x a g1 g2 g3; x a g1 g2 g3.
(a a ) g1 ( ) g2 ( ) g3 0,
Пусть
r
a a 0
g1, g 2 , g3
Но это условие и означает, что вектора
являются линейно
зависимыми и не могут образовывать базис. Это, в свою очередь,
доказывает единственность разложения.
35.
§ 4. Базис. Координаты вектора в базисе.Определение 6. Числа
a, ,
называются координатами вектора
в разложении
x
в базисе
x a g1 g2 g3
g1, g2 , g3 .
Координаты – величины скалярные.
Для краткой записи вектора
x a g1 g2 g3 в координатном
представлении будем использовать следующую форму:
x{a, , },
т. е. каждому вектору в данном базисе можно поставить во взаимно
однозначное соответствие матрицу-строку.
36.
§ 5. Действия с векторами в координатном представлении.В каждом конкретном базисе
g1, g 2 , g3 каждый вектор
находится во взаимно-однозначном соответствии с упорядоченной
тройкой чисел a, , – своими координатами. Возникает вопрос о
том, как выполнять операции с векторами в координатном
представлении.
С другой стороны, ранее были изучены матрицы и операции
над ними, и целесообразно было бы свести операции с векторами в
координатном представлении к матричным операциям.
Теорема 1. Два вектора
и y 1 g1 2 g 2 3 g3
равны тогда и только тогда, когда равны матрицы координат
x 1 g1 2 g2 3 g3
{ 1, 2 , 3} { 1, 2 , 3}.
37.
§ 5. Действия с векторами в координатном представлении.Теорема 2. Пусть в некотором базисе даны два вектора
x{ 1, 2 , 3} и y{ 1, 2 , 3}. Тогда в этом базисе
1) ax {a 1, a 2 , a 3},
2) x y 1 1, 2 2 , 3 3 .
Иными словами: при умножении вектора на число его координаты
умножаются на это число; при сложении векторов складываются их
соответствующие координаты.
38.
§ 5. Действия с векторами в координатном представлении.Теорема 3. Два вектора
y 1 g1 2 g 2 3 g3
x 1 g1 2 g2 3 g3и
на
плоскости линейно зависимы тогда и только тогда, когда их
соответствующие координаты в некотором базисе пропорциональны, т. е.
Доказательство.
1
1
2
2
Необходимость. Пусть вектора
теореме 3.1
x
0.
и
y
линейно зависимы, тогда по
x y, или в координатной форме 1 1
Исключив λ из этих уравнений, получаем
1 2 2 1 0,
Достаточность. Пусть
откуда
.
2 2
что и означает равенство нулю определителя.
1
1
2
2
0. Тогда 1 2 2 1 0,
1 2
.
1 2
Таким образом, вектора
пропорциональны, а, значит, и линейно зависимы.
x
и
y
39.
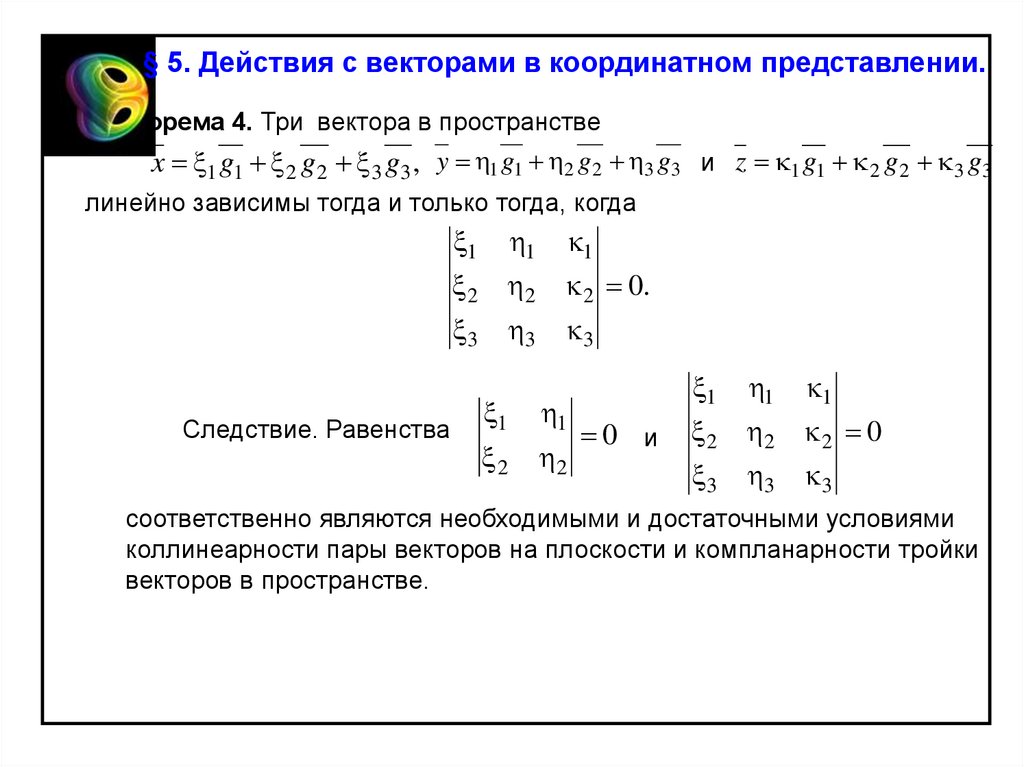
§ 5. Действия с векторами в координатном представлении.Теорема 4. Три вектора в пространстве
x 1 g1 2 g2 3 g3 , y 1 g1 2 g2 3 g3 и z 1 g1 2 g2 3 g3
линейно зависимы тогда и только тогда, когда
Следствие. Равенства
1
1
1
2
2
2 0.
3
3
3
1
1
2
2
0 и
1
1
1
2
2
2 0
3
3
3
соответственно являются необходимыми и достаточными условиями
коллинеарности пары векторов на плоскости и компланарности тройки
векторов в пространстве.
40.
§ 5. Действия с векторами в координатном представлении.Пример 1. Показать, что вектора a{3; 1; 2}, b{1; 2; 0}, c{ 1; 7; 1}
образуют базис в трехмерном пространстве.
Решение.
Вычислим определитель, столбцы которого представляют
координаты векторов:
3
1
1 2
2
0
1
7 5.
1
Так как определитель отличен от нуля, то столбцы линейно
независимы, т. е. указанные вектора образуют базис.
41.
§ 5. Действия с векторами в координатном представлении.Пример 2.
Разложить вектор
с
по базису p; q; r , где c{11; 6; 5},
p{3; 2; 1}, q{ 1; 1; 2}, r{2; 1; 3}.
Решение.
Разложим вектор
коэффициентами
с
по базису
p; q; r
с неопределенными
a, , :
c a p q r.
В координатах это разложение представляет собой систему трех
a, , :
уравнений относительно
3a 2 11
2a 6.
a 2 3 5
Имеем:
8; a 16; 24; 8; откуда по правилу Крамера
a 2; 3;
Ответ:
c 2 p 3q r.
1.
42.
§ 6. Декартова система координат.Определение 1.
и точки О,
Совокупность базиса g1 , g 2 , g3
в которую помещены начала всех базисных векторов, называется
декартовой системой координат и обозначается О, g1, g 2 , g3 .
Определение 2. Система координат О, i, j , k , состоящая из
ортонормированного ортогонального базиса и точки О, называется
прямоугольной декартовой системой координат.
Ох – ось абсцисс
z
k
i
x
O
Оу – ось ординат
j
y
Оz – ось аппликат
43.
§ 6. Декартова система координат.Рене́ Дека́рт
1596 — 1650,
— французский математик,,
создатель аналитической
геометрии и современной
алгебраической символики,
Родился в городе Лаэ (ныне г. Декарт).
Декарт ввел математическую
символику, близкую к современной.
Коэффициенты он обозначал a, b, c…,
а неизвестные — x, y, z. Натуральный
показатель степени принял
современный вид. Появилась черта над
подкоренным выражением.
44.
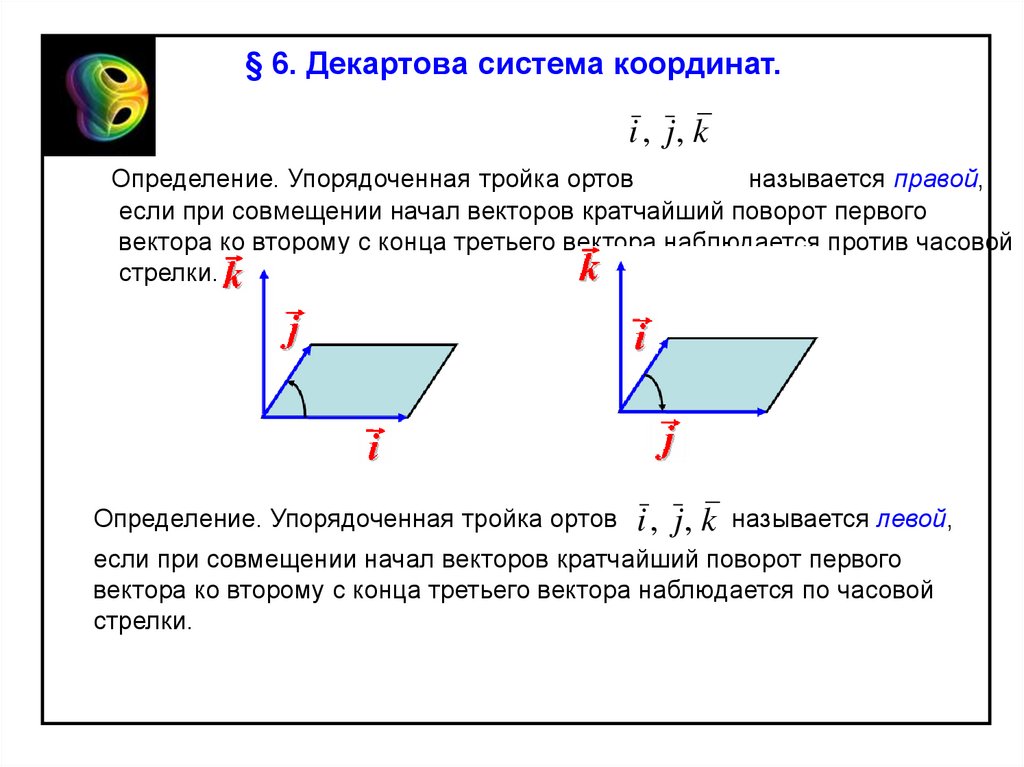
§ 6. Декартова система координат.i , j, k
Определение. Упорядоченная тройка ортов
называется правой,
если при совмещении начал векторов кратчайший поворот первого
вектора ко второму с конца третьего вектора наблюдается против часовой
стрелки.
Определение. Упорядоченная тройка ортов
i , j, k
называется левой,
если при совмещении начал векторов кратчайший поворот первого
вектора ко второму с конца третьего вектора наблюдается по часовой
стрелки.
45.
§ 6. Декартова система координат.Если задана система координат О, i, j , k , то произвольной точке
М в пространстве можно поставить во взаимно однозначное
соответствие вектор r , начало которого находится в точке О,
а конец в точке М.
Определение 3. Вектор
r OM
точки М в системе координат
называется радиус-вектором
О, i, j, k .
Определение 4. Координаты радиус-вектора точки М называются
координатами точки М в системе координат О, i, j, k .
46.
§ 6. Декартова система координат.A(-1; 3;-6)
B(-2;-3; 4)
C( 3;-2; 6)
I
z
I
В
I
I
I
I
I
I
I
I
j
x
I
I
I
I
I
i
O
I
I
k
I
I
I
I
I
I
I
I
С
OA{-1; 3;-6}
OB{-2;-3; 4}
OC{ 3;-2; 6}
А
I
y
47.
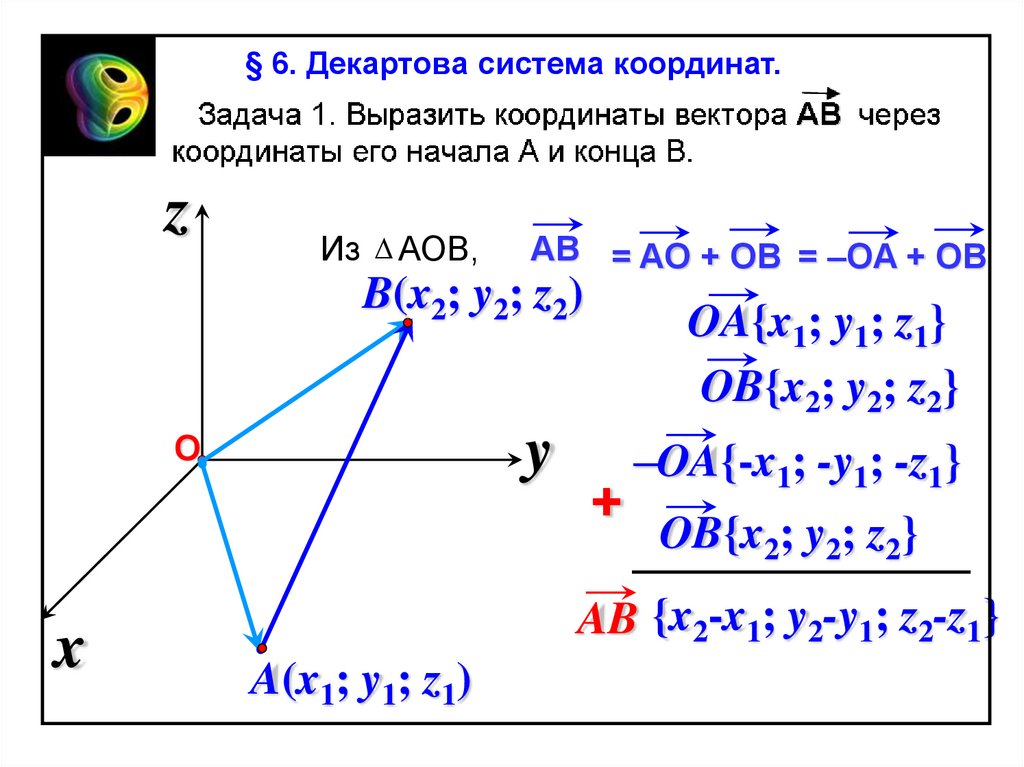
§ 6. Декартова система координат.z
Из АОB,
AB = AО + ОB = –ОA + ОB
B(x2; y2; z2)
y
О
x
OA{x1; y1; z1}
OB{x2; y2; z2}
–OA{-x1; -y1; -z1}
+ OB{x ; y ; z }
2
2 2
AB {x2-x1; y2-y1; z2-z1}
A(x1; y1; z1)
48.
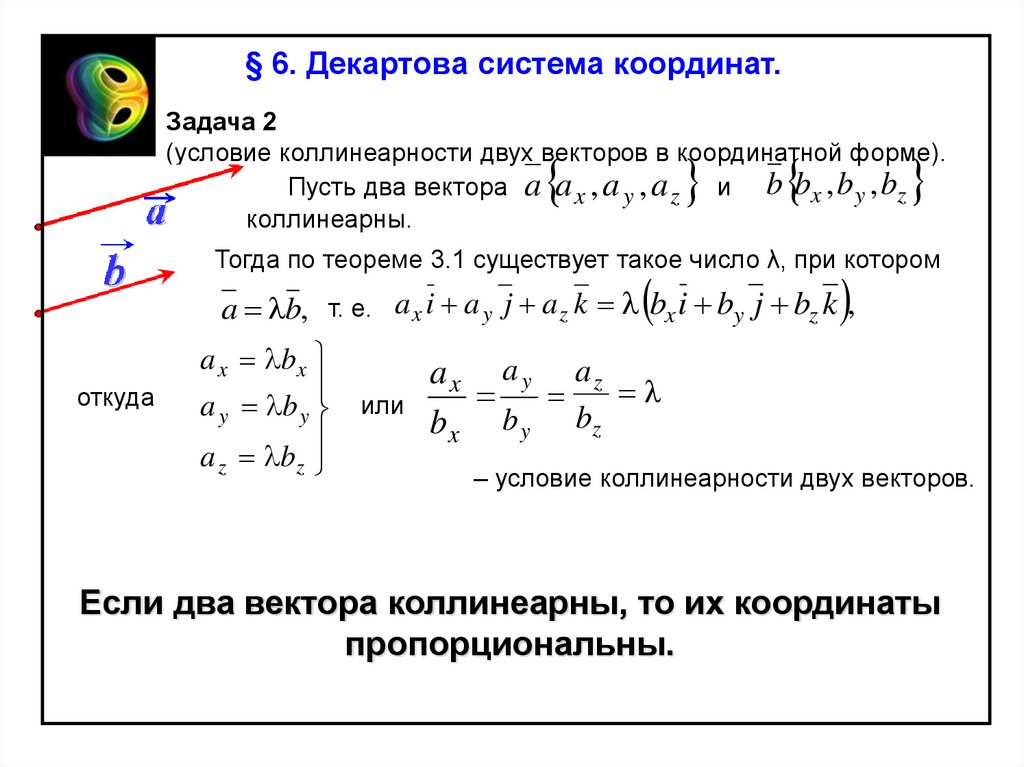
§ 6. Декартова система координат.Задача 2
(условие коллинеарности двух векторов в координатной форме).
Пусть два вектора a a x , a y , a z и b bx , b y , bz
коллинеарны.
Тогда по теореме 3.1 существует такое число λ, при котором
a b, т. е. a x i a y j a z k bx i by j bz k ,
откуда
a x b x
a y b y
a z b z
или
ax a y az
bx b y bz
– условие коллинеарности двух векторов.
Если два вектора коллинеарны, то их координаты
пропорциональны.
49.
§ 6. Декартова система координат.Пример 1. Коллинеарны ли вектора
a {2; 66;-3}; b{6;18;-9}
6 18 -9
=
=
Векторы
1
=
3
a
и
b = 3a
b
или
коллинеарны.
1
a= b
3
50.
§ 6. Декартова система координат.Пример 2.
В декартовой системе координат A(1,3,0), B(2,0,-1), C(3,-3,-2). Доказать,
что точки A, B, C лежат на одной прямой.
Решение
Очевидно, точки A, B, C лежат на одной
прямой, если векторы
и
AB{ 1, 1, 1}
AC{ 2 , 2 , 2 } коллинеарны.
Для этого необходимо выполнение условия:
.
AB a AC.
Отсюда следует (теорема 5.2), что координаты векторов
должны быть пропорциональны.
AB{1, 3, 1}; AC{2, 6, 2};
1 3 1
.
2 6 2
Таким образом, точки A, B, C лежат на одной прямой.
AB и AC
51.
§ 6. Декартова система координат.Задача 3
(деление отрезка в данном
системе
).
A( x1, y1отношении).
, z1 ), B( x2 , y2 ,Вzдекартовой
2
координат заданы точки
Найти координаты точки M(x,y,z), делящей отрезок AB в отношении λ:
AM
MB λ.
Решение
Векторы AM и MB коллинеарны, сонаправлены,
отношение их длин равно λ.
Тогда
AM MB.
Переходя к равенству соответствующих координат, получим:
x x1 ( x2 x);
y y1 ( y2 y );
z z1 ( z2 z ).
Выражая отсюда x,y,z, получим для координат точки M:
x
x1 x2
y y 2
z z 2
; y 1
; z 1
.
1
1
1
52.
§ 6. Декартова система координат.В частности, координаты середины отрезка (λ=1) равны полусумме
соответствующих координат его концов.
z
A(x1;y1;z1)
x1+x2 y1+y2 z1+z2
C(
;
;
)
2
2
2
B(x2;y2;z2)
О
y
x
x1+x2 y1+y2 z1+z2
OC{
;
;
}
2
2
2
53.
§ 6. Декартова система координат.Пример.
Разделить отрезок АВ ( А(3,5; 1), B(2; 2)) на три равные части.
Решение
x1 x2
y1 y 2
z1 z 2
x
; y
; z
.
1
1
1
с
AC
1
,
CB 2
D
AD
DB
2,
xc
3,5 0,5 2
3,
1 0,5
3,5 2 2
xD
2,5;
1 2
yc
1 0,5 2 4
.
1 0,5
3
yD
1 2 2 5
.
1 2
3
54.
§ 7. Проекция вектора на ось.Пусть вектор AB лежит на некоторой оси l . Направление орта
соответствует направлению оси.
l
0
l0
l
l0
Определение 1. Проекцией вектора, лежащего на оси, на эту ось
называется число, по абсолютной величине равное длине вектора и
взятое со знаком плюс, если направление вектора совпадает с
направлением оси и со знаком минус, если они противоположны.
Пусть вектор AB не лежит на некоторой оси l . Из точек А и B опустим
перпендикуляры на ось. Вектор A B называется компонентой вектора
по оси l . AB
Определение 2. Проекцией вектора, не лежащего на оси l, на эту ось
называется проекция его компоненты по оси l на эту же ось.
Проекция вектора на ось обычно обозначается так: прl AB.
55.
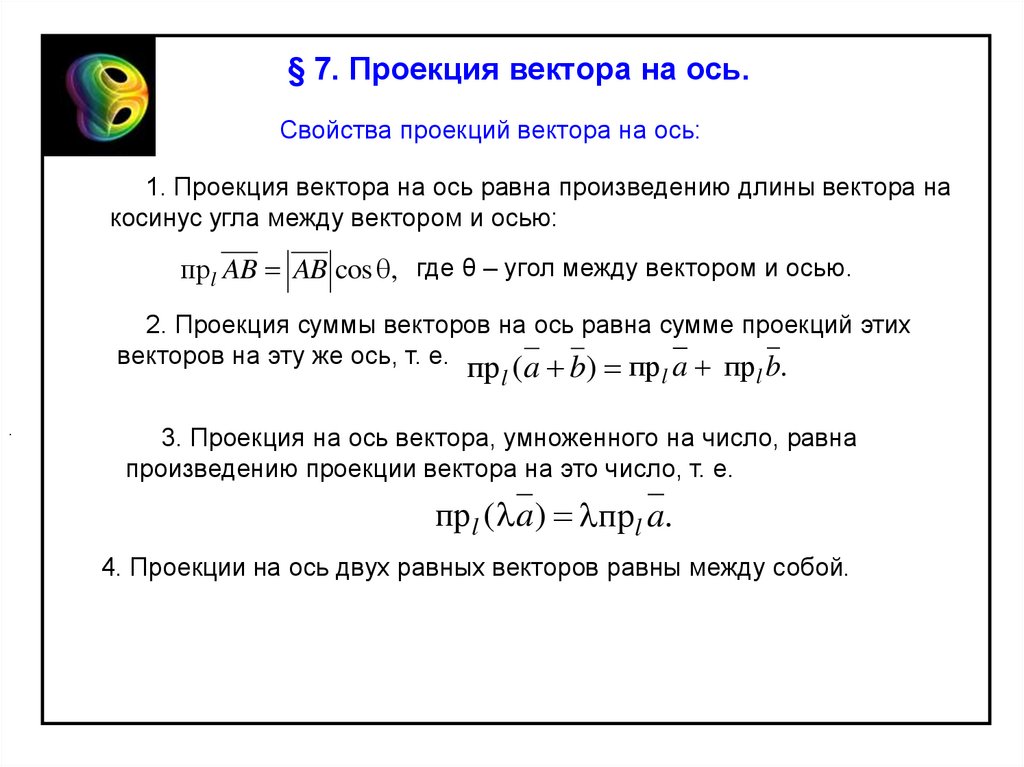
§ 7. Проекция вектора на ось.Свойства проекций вектора на ось:
1. Проекция вектора на ось равна произведению длины вектора на
косинус угла между вектором и осью:
прl AB AB cos , где θ – угол между вектором и осью.
2. Проекция суммы векторов на ось равна сумме проекций этих
векторов на эту же ось, т. е.
пр a пр b.
прl (a b)
.
l
l
3. Проекция на ось вектора, умноженного на число, равна
произведению проекции вектора на это число, т. е.
прl ( a) прl a.
4. Проекции на ось двух равных векторов равны между собой.
56.
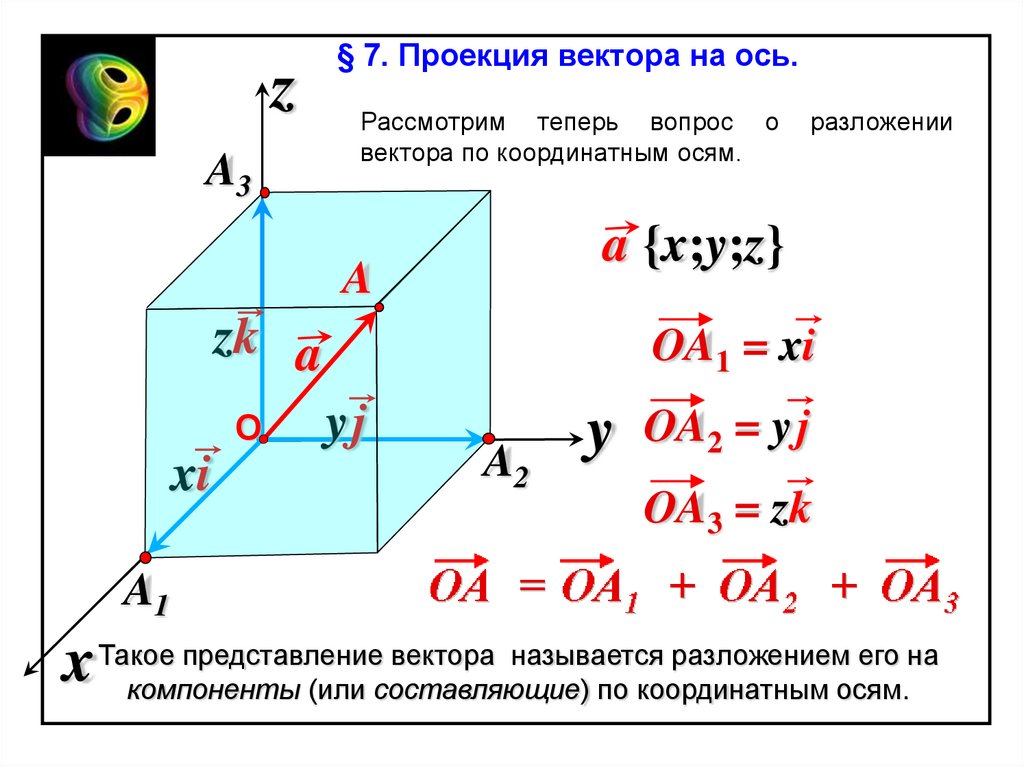
zA3
§ 7. Проекция вектора на ось.
Рассмотрим теперь вопрос о
вектора по координатным осям.
a {x;y;z}
A
zk a
О
xi
разложении
OA1 = xi
yj
A2
y
OA2 = y j
OA3 = zk
A1
представление вектора называется разложением его на
x Такое
компоненты (или составляющие) по координатным осям.
57.
aВычисление длины вектора по его координатам
{x;y;z}
По правилу параллелепипеда
z
2= 2OA
2+
2 +OA
22+
22
OAOA
= OA
OA
+
OA
1 1
22
3
A3
OA1 = xi = x
A
zk a
О
OA2 = y j = y
yj
y
OA = zk = z
A2
3 из суммы
Длина вектора равна квадратному
корню
квадратов его координат.
xi
A1
x
2
2
2
2
2
2
a = x + y + z
a = x +y + z
2
58.
Направляющие косинусы вектора.z
a {аx;аy;аz}
аx;аy;аz – проекции
Если
вектора на координатные оси,
то ясно, что имеют место
формулы:
A3
γ
а zk
О
аxi
A1
x
α
A
β
a
аy j
A2
y
a x a cos a
a y a cos
a z a cos
ax
cos a
a
ay
cos
cos 2 a cos 2 cos 2 1.
a
az
cos
a
59.
§ 7. Проекция вектора на ось.Пример 1. Даны точки A(1, –1, 2) и B(3, 2, 3).
Найти: Координаты вектора
AB :
AB{3 1, 2 ( 1), 3 2} AB{2, 3, 1}.
Найти:
Длину вектора
Так как
AB :
a a x2 a 2y a z2 , значит AB 4 9 1 14 .
Найти: Разложение вектора
Так как
Найти:
a ax i a y j az k ,
по базису;
значит
Направляющие косинусы вектора
cosa
Найти:
AB
2
,
14
cos
3
,
14
AB 2i 3 j k.
AB :
cos
1
.
14
Единичный вектор (орт), соответствующий вектору
Так как
a
a ,
a
0
значит
3
1
2
a0
,
,
.
14 14 14
AB :
60.
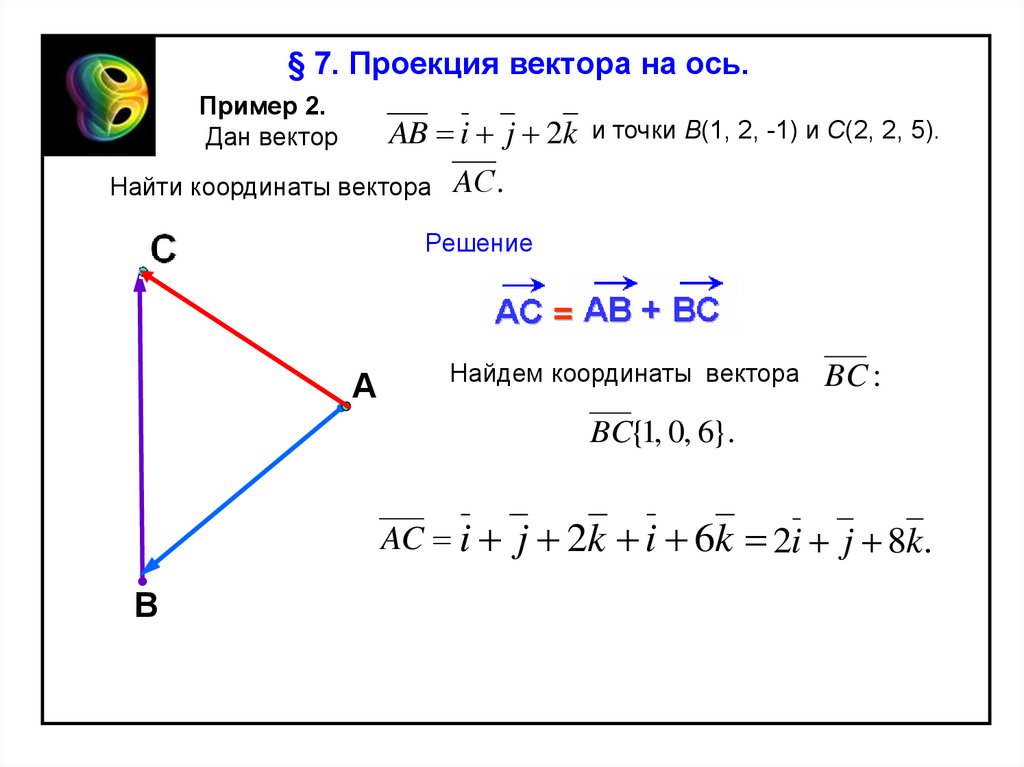
§ 7. Проекция вектора на ось.Пример 2.
Дан вектор
AB i j 2k
Найти координаты вектора
и точки В(1, 2, -1) и С(2, 2, 5).
AС.
Решение
А
Найдем координаты вектора
BC :
BC{1, 0, 6}.
AC i j 2k i 6k 2i j 8k.
В
61.
§ 7. Проекция вектора на ось.Пример 3.
Выяснить, при каких значениях параметров
b i j k коллинеарны.
a i 2 j 3k и
и вектора
Решение
Два вектора коллинеарны, если существует некая константа c
такая, что имеет место соотношение
Отсюда следует, что
a cb.
i 2 j 3k с(i j k ),
откуда
( с)i (2 c) j (3 c)k 0.
Так как орты линейно независимы, ибо они представляют собою
базис, то должны обращаться в нуль коэффициенты этой линейной
комбинации, т. е.
с 0
2 с 0 , откуда
3 с 0
3
2, .
2
62.
§ 8. Скалярное произведение векторов.Скалярным произведением двух ненулевых
векторов называется произведение их длин на
косинус угла между ними.
a b = a b cos(a b )
Если хотя бы один из векторов равен нулю, то
скалярное произведение этих векторов равно нулю
(по определению).
Скалярное произведение векторов – число (скаляр).
Скаляр – лат. scale
– лестница, шкала.
Ввел в 1845г. У. Гамильтон, ирландский математик.
63.
§ 8. Скалярное произведение векторов.a b=
b
0
900
a b = a b cos 900
=0
a
a
b
Если векторы
и
перпендикулярны, то
скалярное произведение векторов равно нулю.
a b = 0 , то векторы a
Обратно: если
перпендикулярны.
и
b
Скалярное произведение ненулевых векторов равно
нулю тогда и только тогда, когда эти векторы
перпендикулярны.
a b = 0
a ^b
64.
§ 8. Скалярное произведение векторов.a b < 900
b
a b =
>0
a b cos a > 0
a
Скалярное произведение ненулевых векторов
положительно тогда и только тогда , когда угол между
векторами острый.
a b > 0 a b < 900
65.
§ 8. Скалярное произведение векторов.a b > 900
a b = a b cos a < 0
b
a
Скалярное произведение ненулевых векторов
отрицательно тогда и только тогда , когда угол между
векторами тупой.
a b < 0 a b > 900
66.
§ 8. Скалярное произведение векторов.Если
b
a
a
b
a b = 00
a b = a b cos 00 = a b
b
a
Если
a
b
a b = 1800
a b = a b cos1800 = – a b
67.
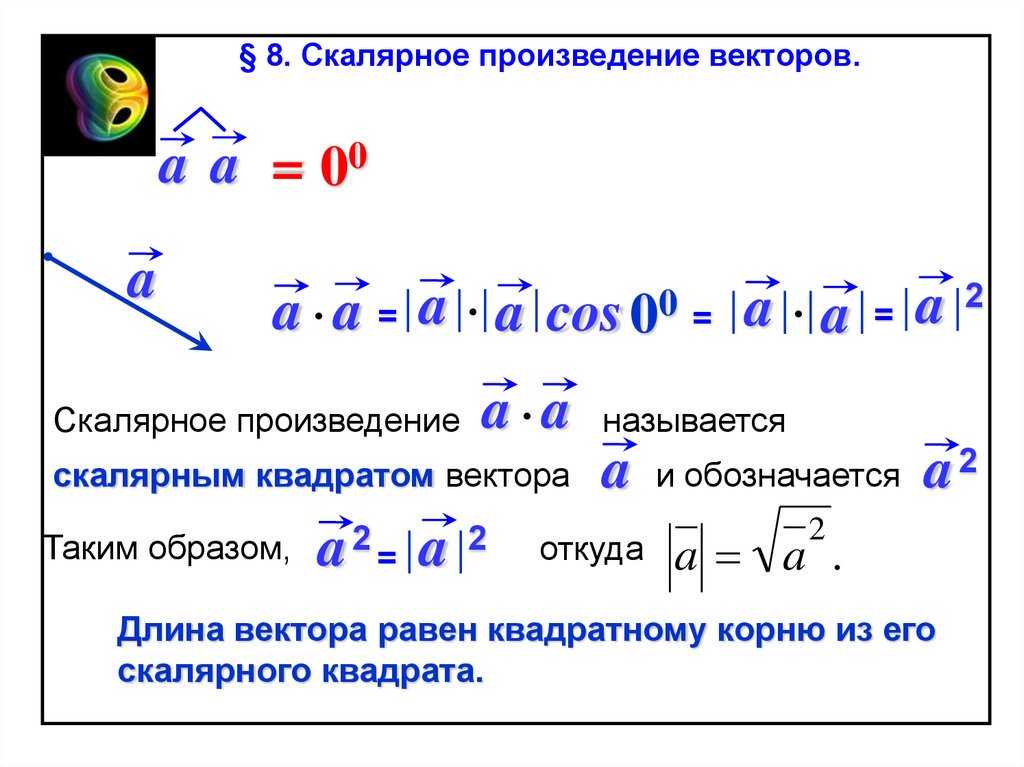
§ 8. Скалярное произведение векторов.a a = 00
a
a a = a a cos 00 = a a
Скалярное произведение
a a
скалярным квадратом вектора
Таким образом,
a
2
=
a
2
=
a
2
называется
a
откуда
и обозначается
a2
2
a a .
Длина вектора равен квадратному корню из его
скалярного квадрата.
68.
§ 8. Скалярное произведение векторов.Свойства скалярного произведения:
1) a b a прa b b прb a.
cos
a
b ,
Действительно, прb a a
тогда
a b a b cos a b b прb a.
Отсюда следует формула для нахождения проекции одного вектора на другой:
прb a
a b
.
b
2) Переместительное или коммутативное свойство:
3) Сочетательное (ассоциативное) свойство:
a b b a.
a b a b a b .
4) Распределительное (дистрибутивное) свойство относительного
сложения векторов:
a b c a b a c.
69.
§ 8. Скалярное произведение векторов.Выведем формулу скалярного произведения в
координатной форме.
a {аx;аy;аz}
b {bx;by;bz}
a b ax i a y j az k bx i by j bz k
2
т.к.
2
axbx a yby azbz ,
.
2
i j k 1, i j j i 0, i k k i 0, k j j k 0.
В частности,
2
a a ax 2 a y 2 az 2 .
70.
§ 8. Скалярное произведение векторов.Скалярное произведение векторов
встречается в физике. Например,
из курса механики известно, что
F
M
N
работа A постоянной силы F при
перемещении тела из точки M в
точку N равна произведению силы F и перемещения
MN на косинус угла между ними.
A = F MN cos
A = F MN
71.
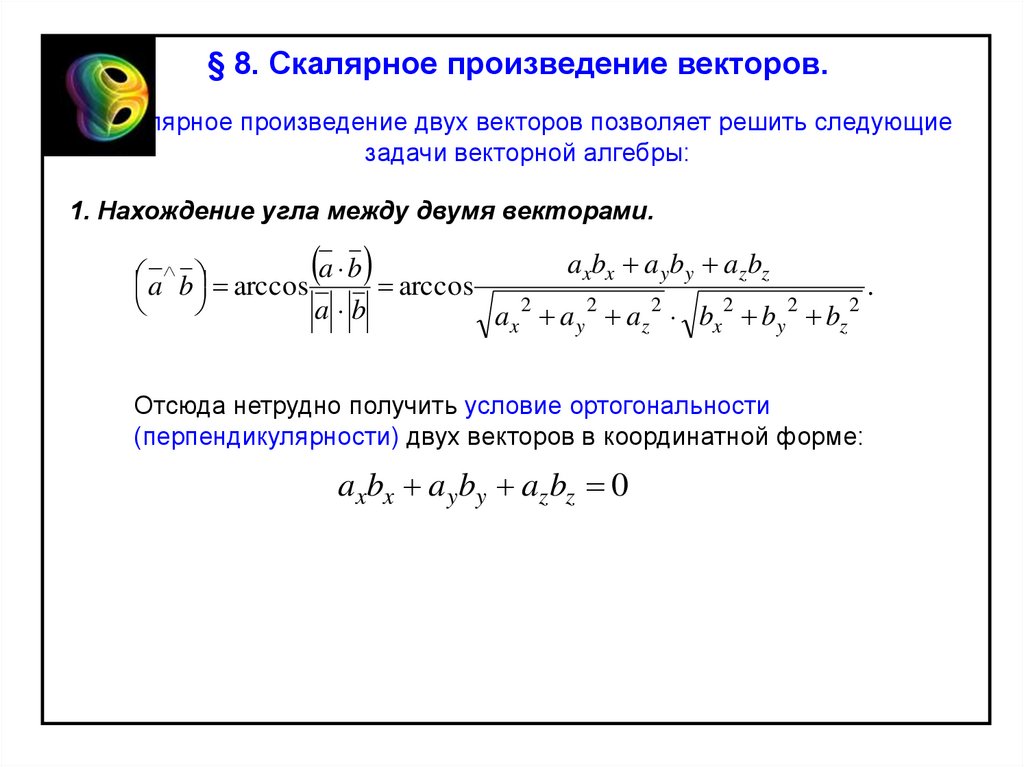
§ 8. Скалярное произведение векторов.Скалярное произведение двух векторов позволяет решить следующие
задачи векторной алгебры:
1. Нахождение угла между двумя векторами.
axbx a yby az bz
a b arccos a b arccos
.
2
2
2
2
2
2
a b
ax a y az bx by bz
Отсюда нетрудно получить условие ортогональности
(перпендикулярности) двух векторов в координатной форме:
axbx a yby azbz 0
72.
§ 8. Скалярное произведение векторов.Пример 1. Даны вершины треугольника: A(2; –1; 3), B(1; 1; 1),
C(0; 0; 5). Найти ABC.
Решение
cos ABC
BA{1, 2, 2},
BA BC
.
BA BC
BA 1 4 4 3,
BC{ 1, 1, 4}, BC 1 1 16 3 2 ,
BA BC 1 2 8 9,
2
cos ABC
,
2
ABC 45о.
73.
§ 8. Скалярное произведение векторов.2. Нахождение проекции одного вектора на направление другого
Пример 2. Даны три точки A(2; 3; 5), B(1; 2; 2), C(3; 5; 4). Найти
пр ВС AB.
Решение
BC{2, 3, 2},
BC 4 9 4 17 ,
AB{ 1, 1, 3},
AB 1 1 9 11,
AВ BC 2 3 6 11,
AB BC
11
.
пр ВС AB
17
BC
74.
§ 8. Скалярное произведение векторов.3. Нахождение длины вектора.
Пример 3. Дан вектор a m n, m n 2, m n .
3
Найти длину вектора
a.
Решение
2
a a .
2
Найдем скалярный квадрат вектора
2
a.
2
a ( m n) ( m n) m 2 m n n
2
1
m 2 m n cos m n n 4 2 2 2 cos 4 8 8 12.
3
2
2
2
a a 2 3.
75.
§ 8. Скалярное произведение векторов.Определить длины диагоналей параллелограмма, построенного на
векторах
a 2m n и b m 2n, где m, n – единичные векторы,
угол между которыми равен 60°.
Решение
2
2
2
d1 (3m n) (3m n) 9m 6m n n
2
9
6
1
1
cos
1 7.
9 m 6 m n cos m n n
3
2
2
2
d 2 (m 3n) (m 3n) m 6 m n cos m n 9 n 13.
2
76.
§ 8. Скалярное произведение векторов.4) Доказательство ортогональности векторов
Пример 5. При каком значении α ортогональны вектора
a i 2j k
и
a 2i a j 2k .
Решение
Принимая во внимание условие ортогональности двух векторов
axbx a yby azbz 0, получим 1 2 2 a 1 2 0.
5)
a 2
Задачи с механическим содержанием
Пример 6. Даны три постоянные силы F1{5; 3; 2}, F2{2; 4; 6},F3{1; 7; 3},
приложенные в одной точке. Найти работу равнодействующей этих сил на
прямолинейном перемещении из положения М1(4,4,6) в положение
М2(7,5,2).
Решение
Равнодействующая сила
F F1 F2 F3 8i 6 j 7k.
Вектор перемещения S M1M 2{3, 1, 4}.
Искомая работа
A F S 8 3 6 1 7 ( 4) 2.
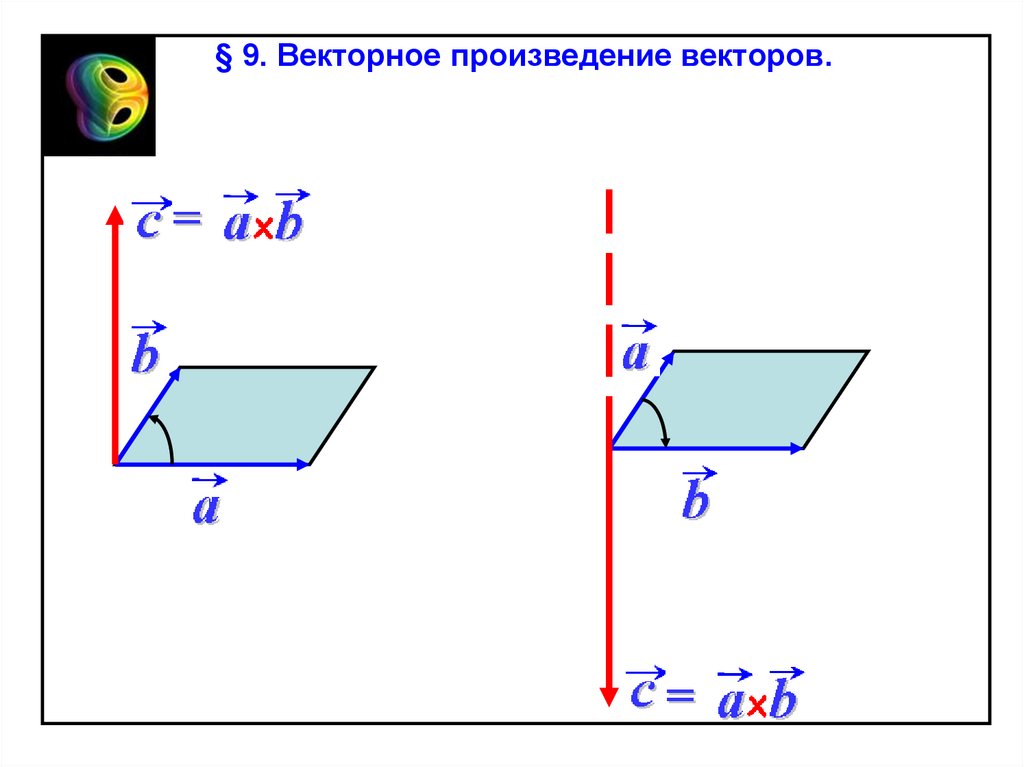
77.
§ 9. Векторное произведение векторов.Введем еще одну операцию над векторами. Эта операция существует
только в трехмерном векторном пространстве, на плоскости она не
определена.
Векторным произведением двух ненулевых
векторов
называется вектор
,
удовлетворяющий трем требованиям:
1)
|a b| = a b sin( a b)
2)
3) Тройка векторов
является правой.
78.
§ 9. Векторное произведение векторов.79.
§ 9. Векторное произведение векторов.Геометрический смысл векторного произведения.
a b sin( a b)
b sin( a b)
Для неколлинеарных векторов
модуль их векторного
произведения равен площади
параллелограмма,
построенного на этих
векторах.
80.
§ 9. Векторное произведение векторов.Свойства векторного произведения:
1) a b b a.
Свойство очевидно, так как синус – функция нечетная.
2) Свойство сочетательности относительно
скалярного множителя:
a b a b a b .
3) Распределительное свойство относительно сложения
векторов:
a b c a b a c,
a b c d a c b c
a d b d.
81.
§ 8. Векторное произведение векторов.Если вектора коллинеарные, то
b
a
a b = 00
a b sin 00
Признак коллинеарности векторов:
Для того чтобы два ненулевых вектора были коллинеарны,
необходимо и достаточно, чтобы их векторное произведение было
бы равно нулю.
В частности, имеем для ортов:
82.
§ 9. Векторное произведение векторов.Рассмотрим векторные произведения различных ортов.
Очевидно, что векторное произведения двух различных
ортов будет равно третьему орту, взятому:
• со знаком + , если тройка ортов правая;
• со знаком – , если тройка ортов левая.
Если векторы правой тройки изменять непрерывно, то в любой момент
такой деформации эта тройка векторов будет оставаться правой тройкой.
Тогда
Если векторы левой тройки изменять непрерывно, то в любой момент
такой деформации эта тройка векторов будет оставаться левой тройкой.
Тогда
83.
§ 9. Векторное произведение векторов.Выразим теперь векторное произведение через координаты векторов,
его составляющих.
a b ax i a y j az k bx i by j bz k
axbx i i a ybx j i a z bx k i axby i j a yby j j az by k j
axbz i k a ybk j k a z bz k k
a ybz azby i axbz azbx j axby a ybx k
i
j
k
a b ax
bx
ay
az
by
bz
i
j
k
ax
ay
az
bx
by
bz
84.
§ 9. Векторное произведение векторов.Векторное произведение имеет простую
механическую интерпретацию.
M l
r
Если сила
F
то момент
M
F
поворачивает тело вокруг оси
силы
F
l,
относительно т. О, равен
M r F.
85.
§ 9. Векторное произведение векторов.Векторное произведение двух векторов позволяет решить
следующие задачи векторной алгебры.
1) Нахождение площади параллелограмма и треугольника
86.
§ 9. Векторное произведение векторов.Пример 1.
Найти площадь треугольника с вершинами в точках
A(0, 1, 2), B(0, 4, 1), C (2, 1, 1).
Решение
S
1
AB AC ,
2
AB 0, 3, 3 ;
i
j
k
AC 2, 0, 3 .
AB AC 0 3 3 9, 6, 6 ,
2 0 3
AB AC 81 36 36 153 ,
S
1
153
AB AC
6,18
2
2
87.
§ 9. Векторное произведение векторов.Пример 2. Найти площадь треугольника, построенного на векторах
Решение
S
1
2a b b ,
2
2a b b 2a b b b 2a b,
1
a
,
b
2
sin
1.
S 2a b a b sin
6
2
88.
§ 9. Векторное произведение векторов.2) Нахождение векторов, перпендикулярных данной плоскости
Пример 3. Найти единичный вектор, перпендикулярный к плоскости, в
которой лежат точки
A(0, 1, 2), B(0, 4, 1), C (2, 1, 1).
Решение
c AB AC
В силу определения векторного
произведения векторов
c AB AC.
AB 0, 3, 3 , AC 2, 0, 3 ,
i
j
k
c AB AC 0 3 3 9, 6, 6 ,
2 0 3
Поставленной задаче удовлетворяют два единичных вектора
0
c
9i 6 j 6k
.
153
89.
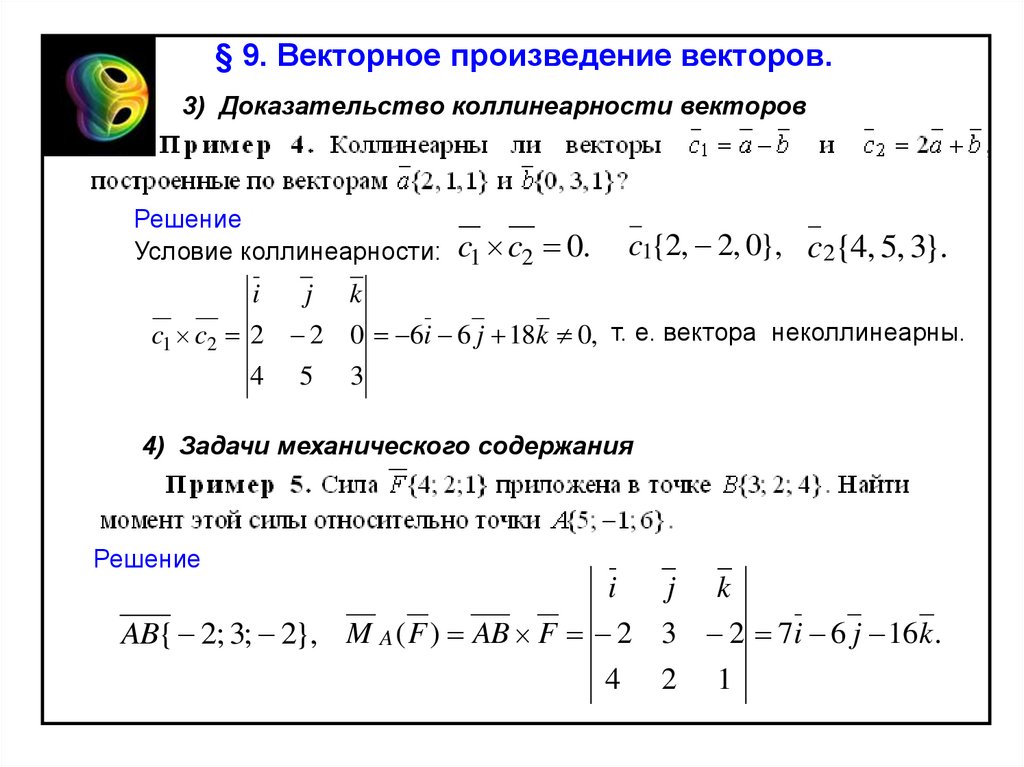
§ 9. Векторное произведение векторов.3) Доказательство коллинеарности векторов
Решение
Условие коллинеарности:
i
j
c1{2, 2, 0}, c 2{4, 5, 3}.
c1 c2 0.
k
c1 c2 2 2 0 6i 6 j 18k 0, т. е. вектора неколлинеарны.
4
5
3
4) Задачи механического содержания
Решение
i
j
k
AB{ 2; 3; 2}, M A ( F ) AB F 2 3 2 7i 6 j 16 k .
4 2 1
90.
§ 10. Смешанное произведение векторов.a, b, c
Определение 1.
Смешанным произведением ненулевых векторов
называется скалярное произведение вектора a
произведения вектора b на вектор c , т. е. выражение
и векторного
a b c .
Свойства смешанного произведения:
1) Смешанное произведение не меняется при циклической перестановке
перемножаемых векторов.
a b c b c a c a b .
2) При перестановке двух соседних векторов модуль смешанного
произведения не меняется, а знак меняется на противоположный, т. к.
тройка меняет свою ориентацию.
a b c a c b
3) a b c c a b a b c,
т.е. порядок знаков умножения не важен.
Поэтому принято смешанное произведение обозначать
a b c.
91.
§ 10. Смешанное произведение векторов.Выразим теперь смешанное произведение через координаты
векторов, его составляющих.
i
j
k
b c bx
by
bz ,
cx
cy
cz
a b c ax
by
bz
cy
cz
или
ay
by
b c
cy
bz
bx
cz
cx
az
bx
bz bz
;
cz cz
ax
ay
az
bx
cy
cx
by
bz .
cy
cz
by
cx
ax
ay
az
a b c bx
cx
by
bz .
cy
cz
bx bx by
;
.
cx cx c y
92.
§ 10. Смешанное произведение векторов.Теорема 1. Смешанное произведение векторов равно нулю
тогда и только тогда, когда вектора a, b, c компланарны.
Доказательство.
Необходимость.
a b c 0.
Возможны два случая.
1) b c 0, т.е. вектора коллинеарны,
а три вектора, два из которых коллинеарны, всегда компланарны.
2) b c 0, но
a b c 0.
Тогда a ^ b c .
Это значит, что три вектора лежат в
одной плоскости.
93.
§ 10. Смешанное произведение векторов.Достаточность.
a, b, c
- компланарны.
Тогда их можно поместить в одной плоскости.
Вектор
перпендикулярен плоскости, а, следовательно, и
Тогда по правилам скалярного произведения
a b c 0.
94.
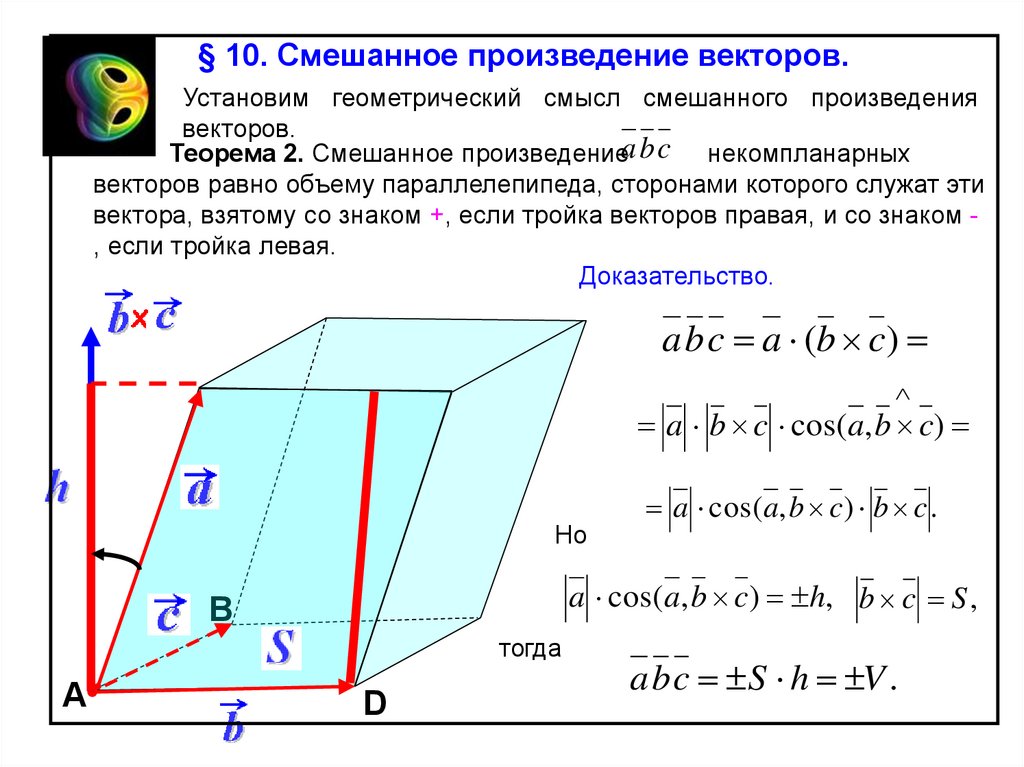
§ 10. Смешанное произведение векторов.Установим геометрический смысл смешанного произведения
векторов.
Теорема 2. Смешанное произведениеa b c некомпланарных
векторов равно объему параллелепипеда, сторонами которого служат эти
вектора, взятому со знаком +, если тройка векторов правая, и со знаком , если тройка левая.
Доказательство.
a b c a (b c)
a b c cos(a, b c)
Но
a cos(a, b c) h, b c S ,
В
тогда
А
a cos(a, b c) b c .
D
a b c S h V .
95.
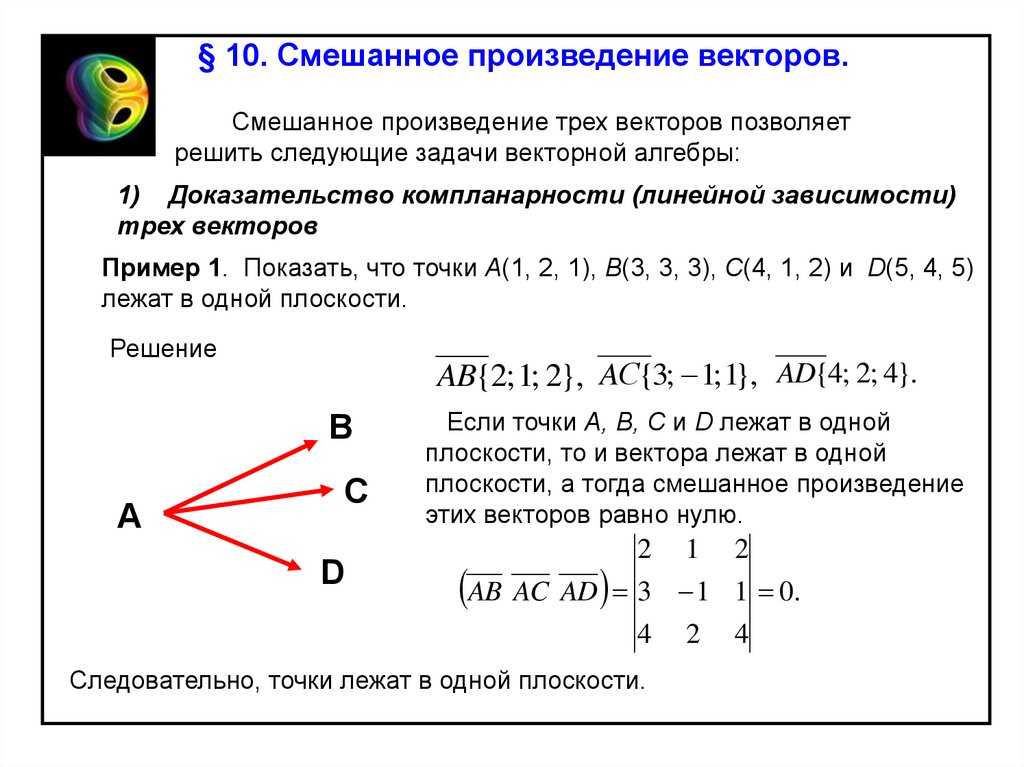
§ 10. Смешанное произведение векторов.Смешанное произведение трех векторов позволяет
решить cледующие задачи векторной алгебры:
1) Доказательство компланарности (линейной зависимости)
трех векторов
Пример 1. Показать, что точки А(1, 2, 1), В(3, 3, 3), С(4, 1, 2) и D(5, 4, 5)
лежат в одной плоскости.
Решение
AB{2; 1; 2}, AС{3; 1; 1}, AD{4; 2; 4}.
B
А
C
D
Если точки А, В, С и D лежат в одной
плоскости, то и вектора лежат в одной
плоскости, а тогда смешанное произведение
этих векторов равно нулю.
2
AB AC AD 3
4
Следовательно, точки лежат в одной плоскости.
1
2
1 1 0.
2
4
96.
§ 10. Смешанное произведение векторов.Решение
1 1
a b c 3
4
2
1 0.
Следовательно, векторы компланарны,
а значит, они линейно зависимы,
1 2 3
т. е. существуют константы λ, μ и ν такие, что
i j 2k 3i 4 j k i 2 j 3k 0,
a b c 0.
3 i 4 2 j 2 3 k 0.
3 0 3 0
3 0 3 0 2
4 2 0 0
2 3 0
5 5 0
Данная система имеет бесчисленное множество решений.
a b c 2 a b c 0.
откуда получим искомую линейную зависимость:
2a b c 0
97.
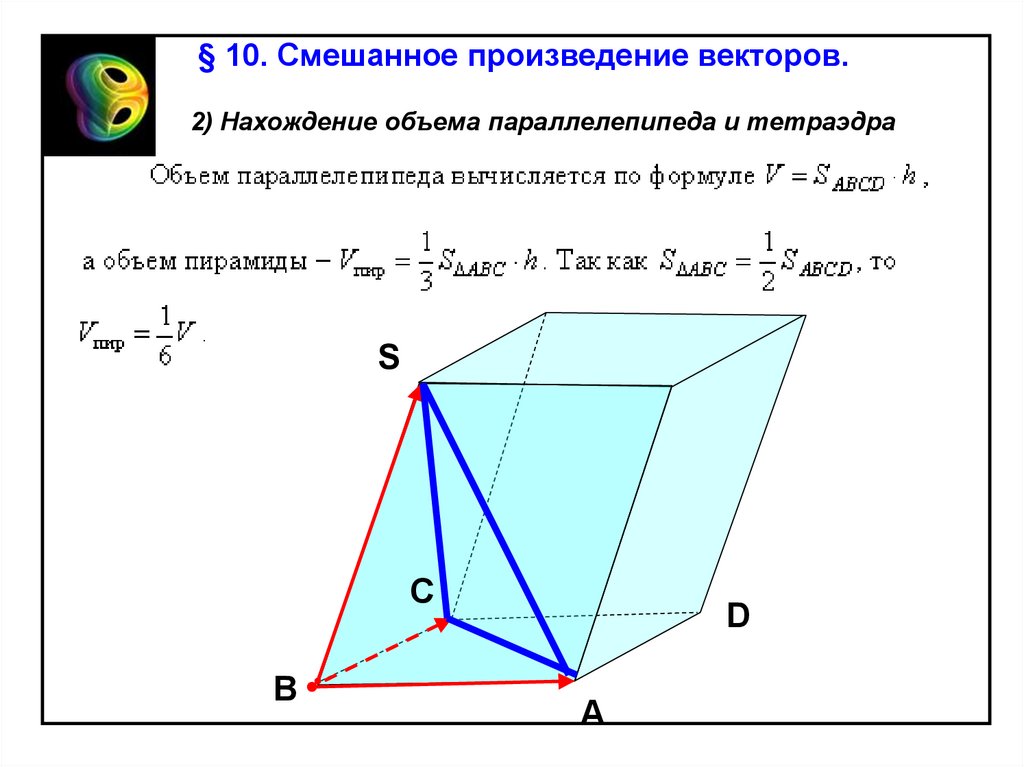
§ 10. Смешанное произведение векторов.2) Нахождение объема параллелепипеда и тетраэдра
S
С
В
D
А
98.
§ 10. Смешанное произведение векторов.Пример 3. В пирамиде АВСD найти высоту, опущенную из
вершины A, если в прямоугольной декартовой системе координат
A(2, 1, 0), B(2, 1, 2), C (0, 1, 3), D( 1, 1, 0).
A
Решение
DA 3, 0, 0 , DB 3, 2, 2 DC 1, 0, 3 ,
i
j
k
2 6, 7, 2 ,
3
1
1
1
2
2
2
S DB DC
6 7 2 89 ,
2
2
2
3
0 0
DB DC
1
V 3 2
6
1
3 2
1
0
1
2 18 3 .
6
0 3
B
E
D
C
Знак «–» показывает, что тройка векторов левая.
3 V
3 3
H
1,91.
S
89 / 2