
 mathematics
mathematicsSimilar presentations:










Векторная алгебра
1. 5. Векторная алгебра
5.1 Основные понятияВектором называется направленный отрезок.
Вектор с началом в точке А и концом в точке В обозначается
символом AB или одной буквой a
В
Длина отрезка AB называется длиной или
модулем вектора и обозначается AB , a
a
А
Вектор, длина которого равна нулю, называется нулевым
вектором и обозначается 0 .
Вектор, длина которого равна единице, называется единичным
вектором и обозначается через e .
Единичный вектор, направление которого совпадает с
направлением вектора a , называется ортом вектора и
0
обозначается a .
2.
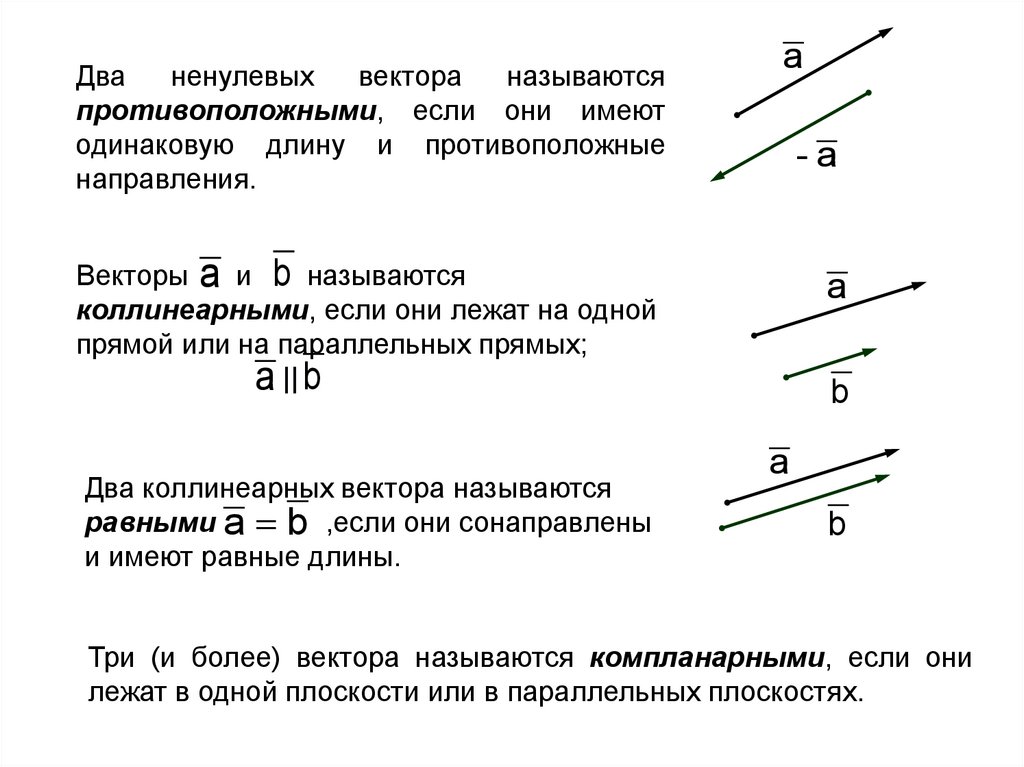
Дваненулевых
вектора
называются
противоположными, если они имеют
одинаковую длину и противоположные
направления.
a
-a
Векторы a и b называются
коллинеарными, если они лежат на одной
прямой или на параллельных прямых;
a || b
Два коллинеарных вектора называются
равными a b ,если они сонаправлены
и имеют равные длины.
a
b
a
b
Три (и более) вектора называются компланарными, если они
лежат в одной плоскости или в параллельных плоскостях.
3.
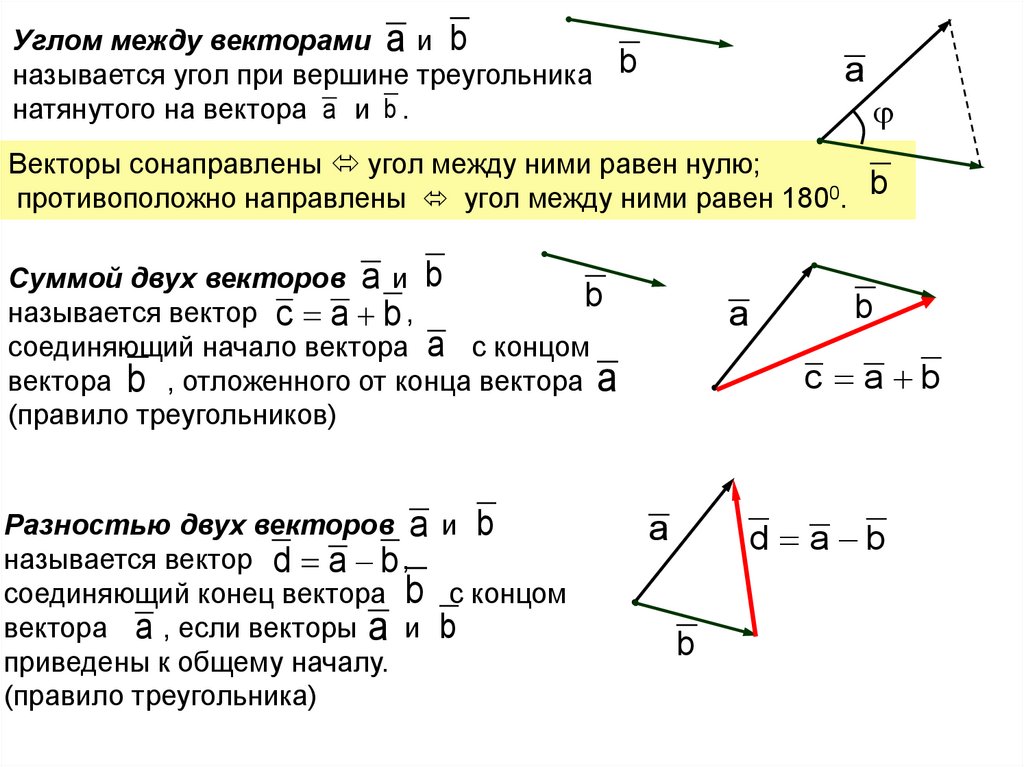
Углом между векторами a и bназывается угол при вершине треугольника b
натянутого на вектора a и b .
a
Векторы сонаправлены угол между ними равен нулю;
противоположно направлены угол между ними равен 1800. b
Суммой двух векторов a и b
b
называется вектор с a b ,
соединяющий начало вектора a с концом
вектора b , отложенного от конца вектора a
(правило треугольников)
Разностью двух векторов a и b
называется вектор d a b ,
соединяющий конец вектора b с концом
вектора a , если векторы a и b
приведены к общему началу.
(правило треугольника)
a
b
c a b
a
d a b
b
4.
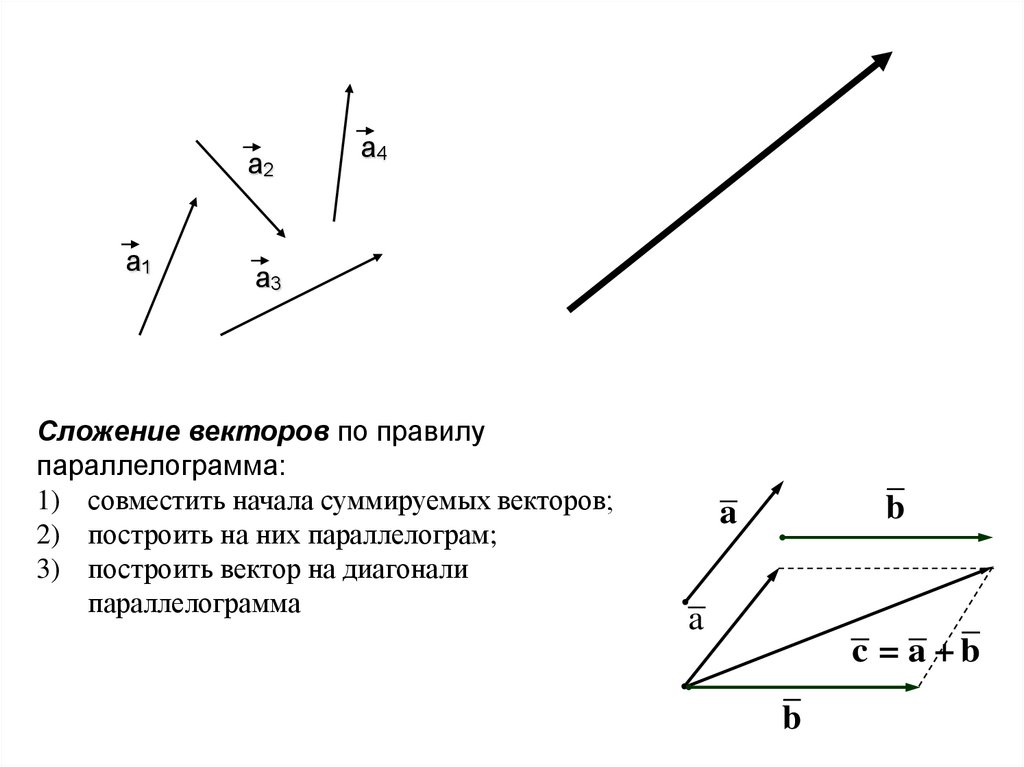
а2а1
а4
а3
Сложение векторов по правилу
параллелограмма:
1) совместить начала суммируемых векторов;
2) построить на них параллелограм;
3) построить вектор на диагонали
параллелограмма
b
a
a
c = a +b
b
5.
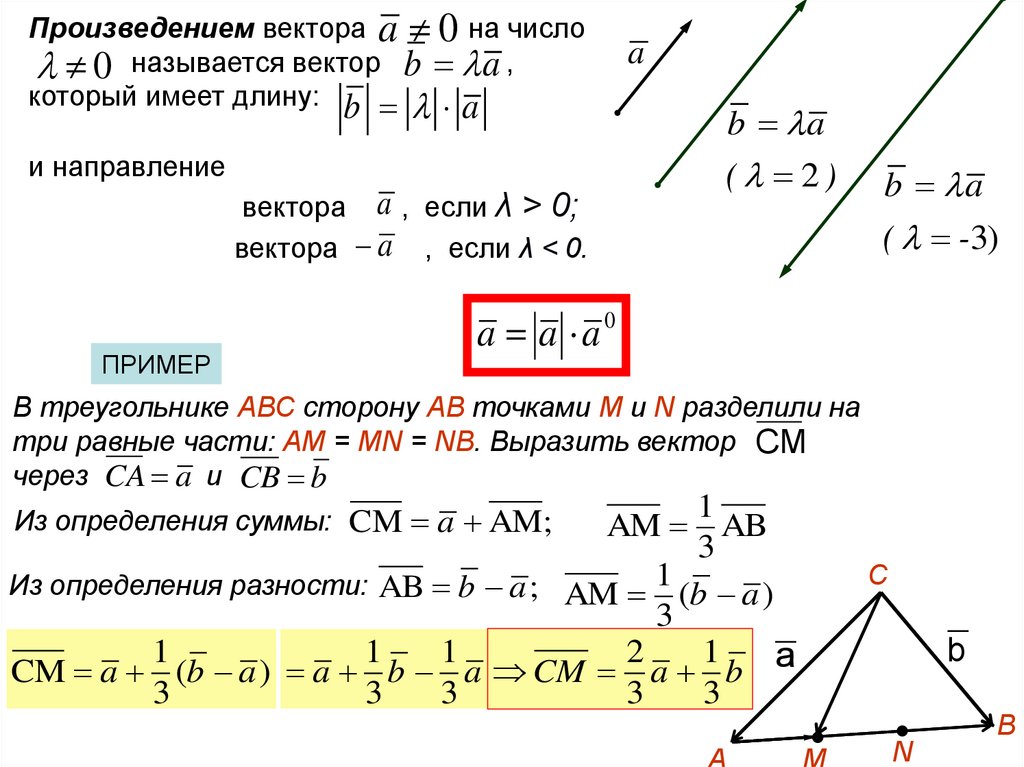
Произведением вектора a 0 на число0 называется вектор b a ,
который имеет длину: b a
и направление
вектора a , если λ > 0;
вектора a , если λ < 0.
ПРИМЕР
a
b a
( 2)
b a
( -3)
a a a0
В треугольнике АВС сторону АВ точками M и N разделили на
три равные части: AM = MN = NB. Выразить вектор CM
через CA a и CB b
1
AM AB
3
Из определения разности: AB b a ; AM 1 (b a )
3
1
1
1
2
1
CM a (b a ) a b a CM a b a
3
3
3
3
3
Из определения суммы: CM a AM;
А
С
b
В
M
N
6.
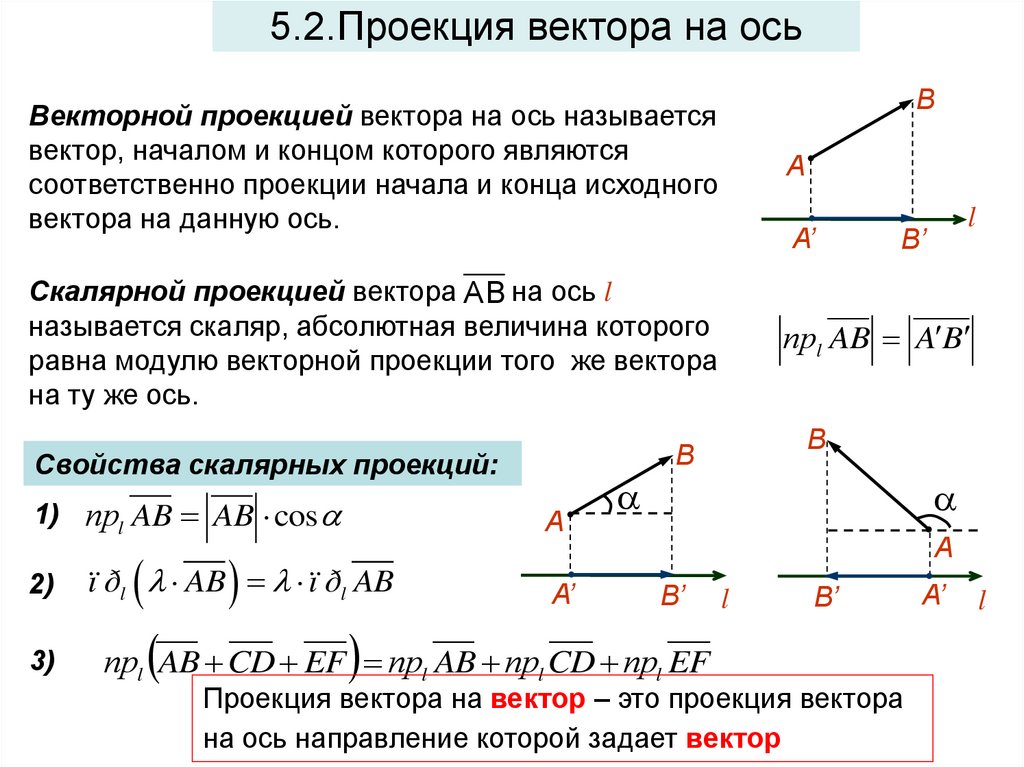
5.2.Проекция вектора на осьВ
Векторной проекцией вектора на ось называется
вектор, началом и концом которого являются
соответственно проекции начала и конца исходного
вектора на данную ось.
А
Скалярной проекцией вектора AB на ось l
называется скаляр, абсолютная величина которого
равна модулю векторной проекции того же вектора
на ту же ось.
прl AB A B
2)
3)
А
ï ðl AB ï ðl AB
А’
В’
В
В
Свойства скалярных проекций:
1) прl AB AB cos
А’
l
А
В’
прl AB CD EF прl AB прl CD прl EF
l
В’
Проекция вектора на вектор – это проекция вектора
на ось направление которой задает вектор
А’
l
7.
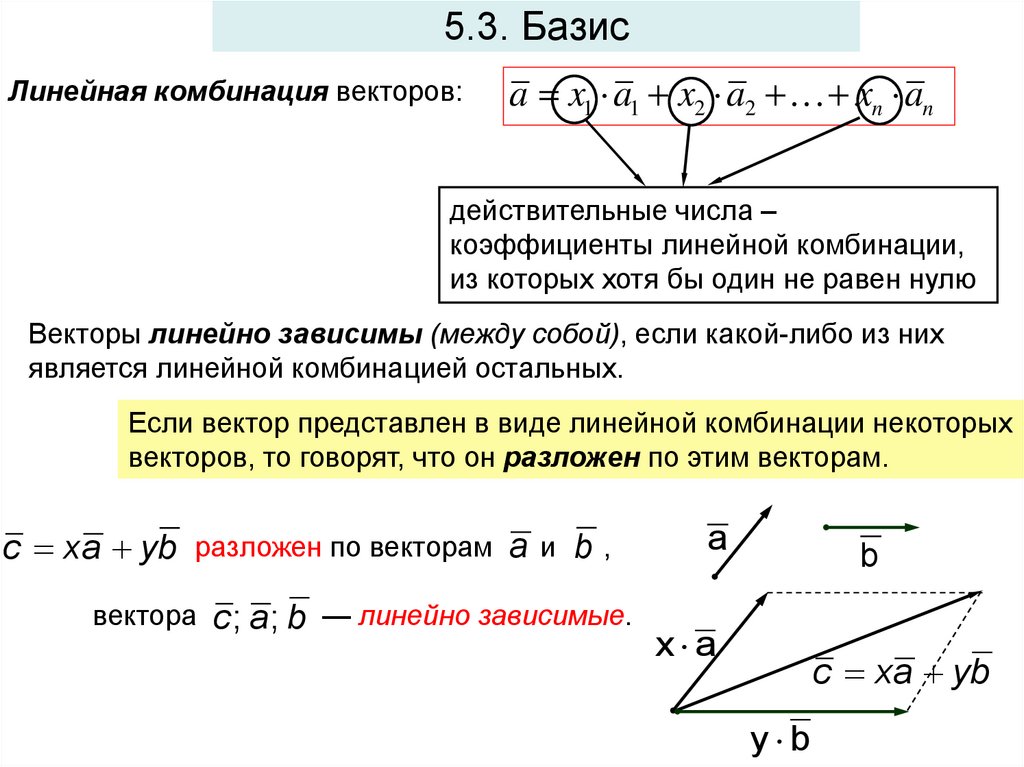
5.3. БазисЛинейная комбинация векторов:
a x1 a1 x2 a2 xn an
действительные числа –
коэффициенты линейной комбинации,
из которых хотя бы один не равен нулю
Векторы линейно зависимы (между собой), если какой-либо из них
является линейной комбинацией остальных.
Если вектор представлен в виде линейной комбинации некоторых
векторов, то говорят, что он разложен по этим векторам.
c xa yb разложен по векторам a и b ,
вектора
c ; a ; b — линейно зависимые.
a
b
x a
c xa yb
y b
8.
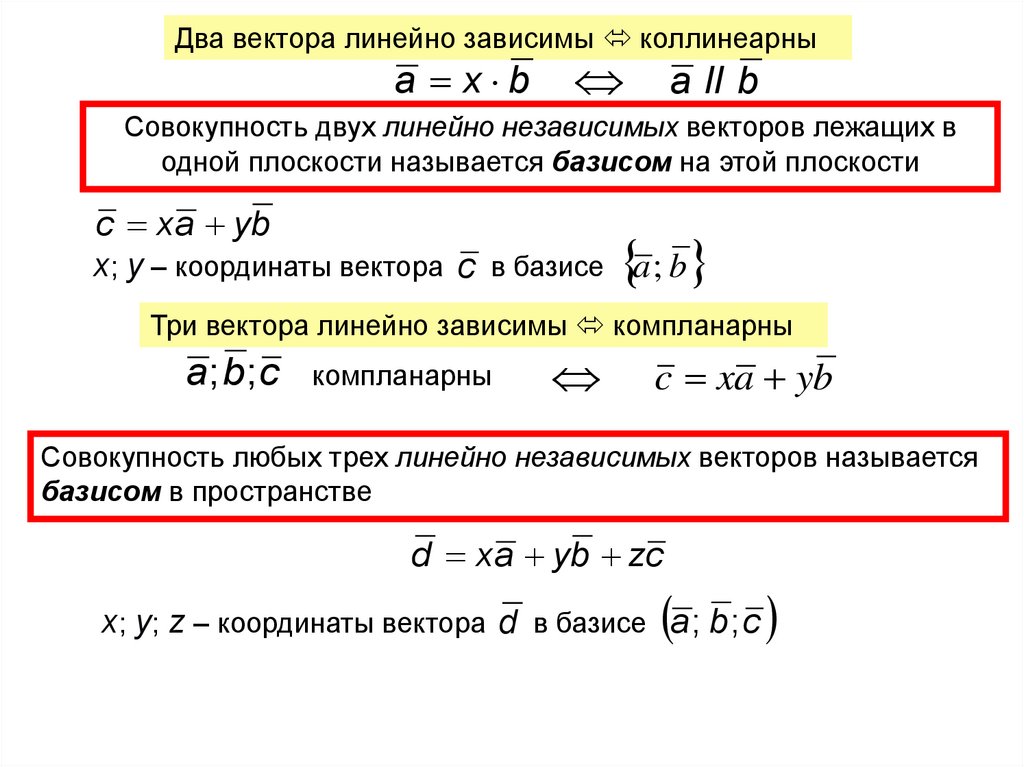
Два вектора линейно зависимы коллинеарныa x b
a II b
Совокупность двух линейно независимых векторов лежащих в
одной плоскости называется базисом на этой плоскости
c xa yb
х; y – координаты вектора c в базисе a; b
Три вектора линейно зависимы компланарны
a; b ; c
компланарны
c xa yb
Совокупность любых трех линейно независимых векторов называется
базисом в пространстве
d xa yb zc
х; y; z – координаты вектора d в базисе a ; b ; c
9.
5.4. Декартова прямоугольная система координатБазис называется ортонормированным, если его вектора
i;
единичны и взаимно перпендикулярны:
j; k орты
Совокупность фиксированной точки O (начало координат) и
ортонормированного базиса i ; j; k называется прямоугольной
декартовой системой координат в пространстве.
Прямые Ox, Oy и Oz, проходящие через начало координат в направлении
базисных векторов i ; j; k называются осями координат. Оx - ось
абсцисс, Оy - ось ординат, Оz - ось аппликат
Плоскости, проходящие через оси координат— координатные
плоскости. Пространство делится на восемь октантов
10.
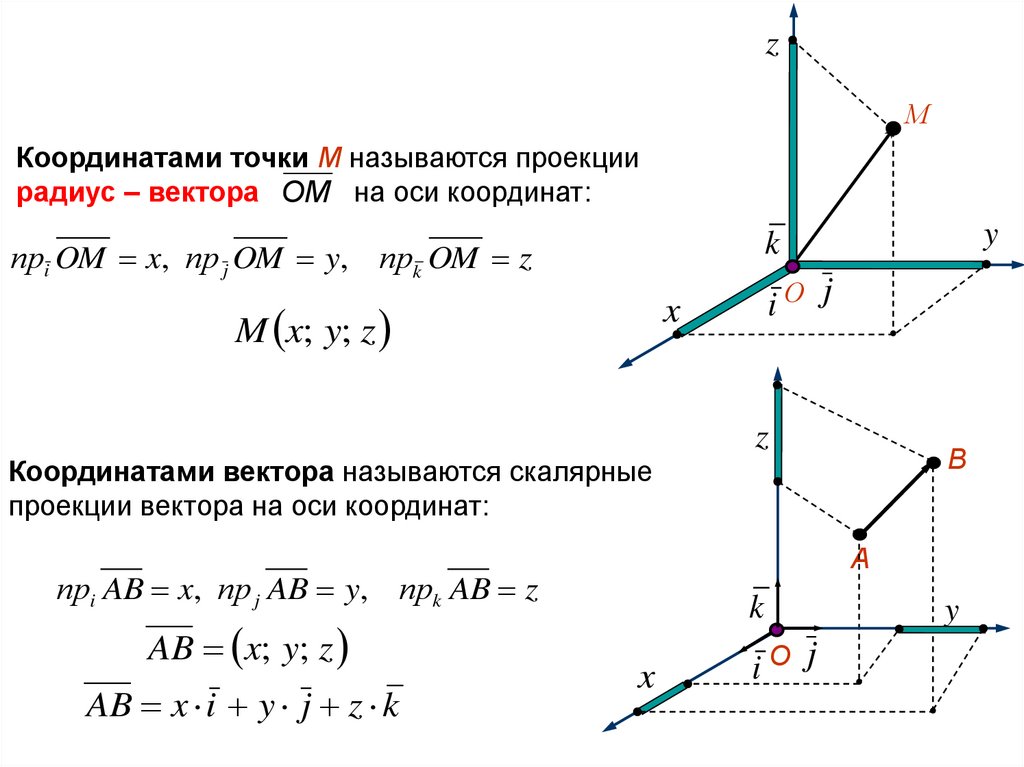
zМ
Координатами точки М называются проекции
радиус – вектора OM на оси координат:
y
k
прi OM x, пр j OM y, прk OM z
M x; y; z
iО j
x
z
В
Координатами вектора называются скалярные
проекции вектора на оси координат:
А
прi AB x, пр j AB y, прk AB z
AB x; y; z
AB x i y j z k
k
x
iО j
y
11.
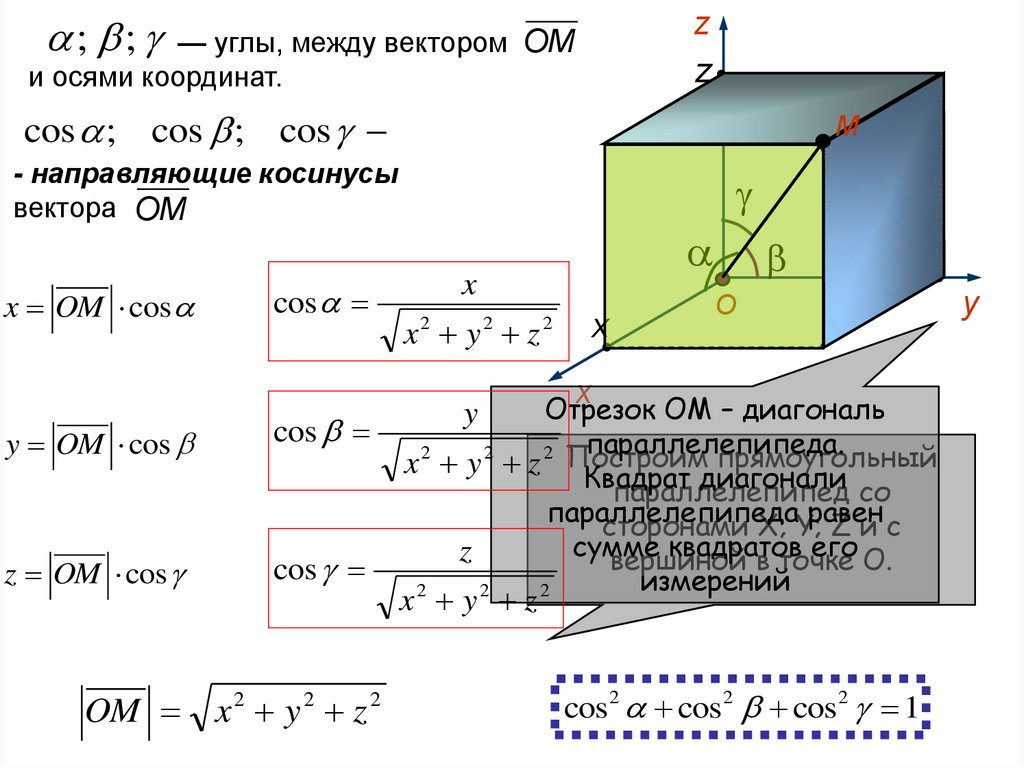
; ;z
z
— углы, между вектором OM
и осями координат.
cos ; cos ; cos
М
- направляющие косинусы
вектора OM
x OM cos
cos
y OM cos
cos
z OM cos
cos
OM x 2 y 2 z 2
x
x y z
2
2
2
x
y
О
x
Отрезок ОМ – диагональ
y
параллелепипеда.
2
2
2 Построим
прямоугольный
x y z Квадрат диагонали
параллелепипед со
параллелепипеда
равен
сторонами X; Y;
Zис
сумме
квадратов
его
z
вершиной в точке О.
измерений
2
2
2
x y z
cos 2 cos 2 cos 2 1
y
12.
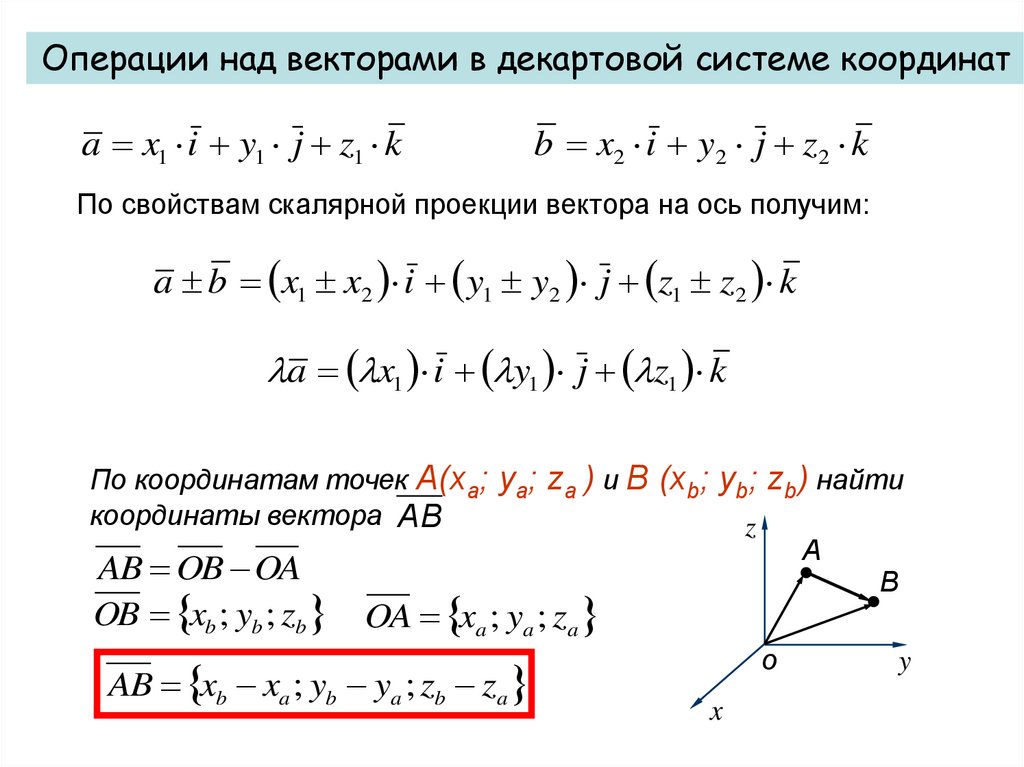
Операции над векторами в декартовой системе координатa x1 i y1 j z1 k
b x2 i y2 j z2 k
По свойствам скалярной проекции вектора на ось получим:
a b x1 x2 i y1 y2 j z1 z2 k
a x1 i y1 j z1 k
По координатам точек А(ха; уа; zа ) и В (хb; уb; zb) найти
координаты вектора AB
z
A
AB OB OA
B
OB xb ; yb ; zb
OA xa ; ya ; za
AB xb xa ; yb ya ; zb za
o
x
y
13.
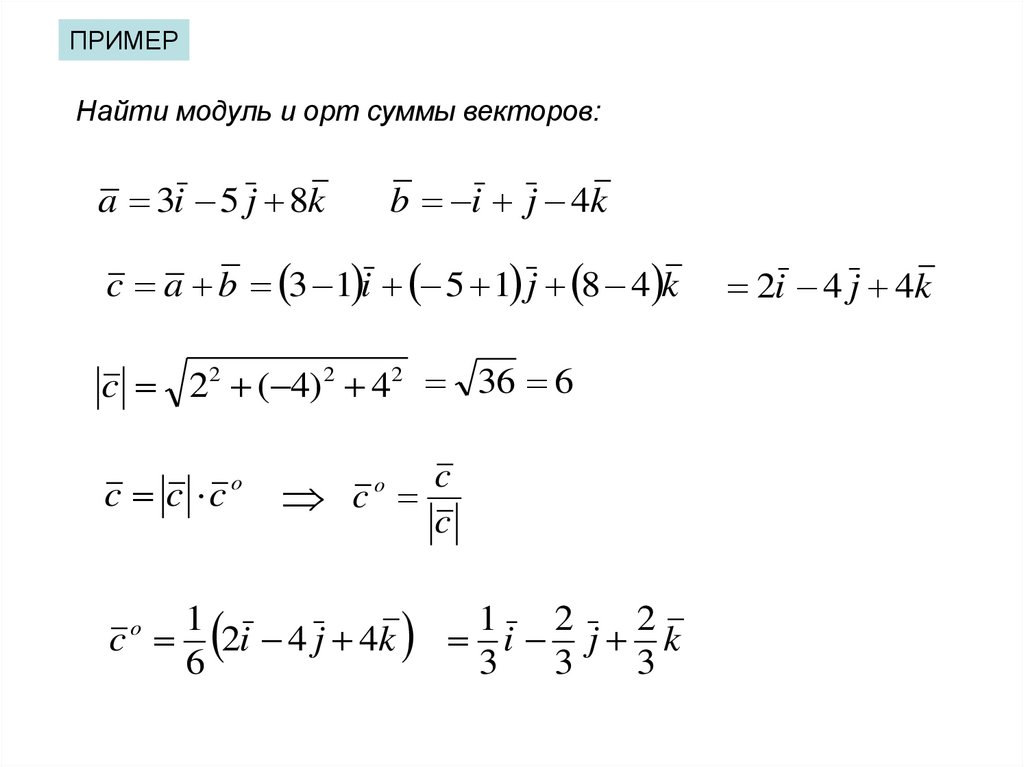
ПРИМЕРНайти модуль и орт суммы векторов:
b i j 4k
a 3i 5 j 8k
c a b 3 1 i 5 1 j 8 4 k
c 22 ( 4) 2 42 36 6
c c co
c
c
c
o
1
1
2
2
c 2i 4 j 4k i j k
6
3
3
3
o
2i 4 j 4k
14.
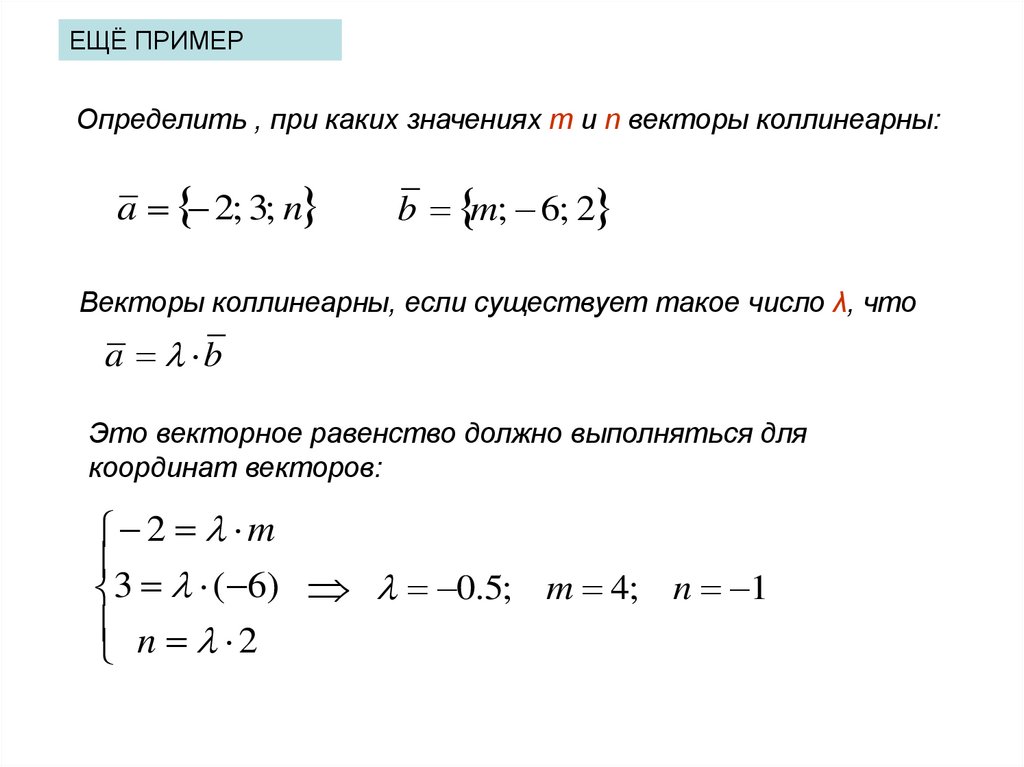
ЕЩЁ ПРИМЕРОпределить , при каких значениях m и n векторы коллинеарны:
a 2; 3; n
b m; 6; 2
Векторы коллинеарны, если существует такое число λ, что
a b
Это векторное равенство должно выполняться для
координат векторов:
2 m
3 ( 6) 0.5; m 4; n 1
n 2