




 geography
geographySimilar presentations:










Исходные направления, принятые в геодезии. Углы ориентирования. Геодезические задачи
1.
Лекция №4.Плановое съемочное обоснование.
Ориентирование линий.
4.1. Исходные направления, принятые
в геодезии. Углы ориентирования.
4.2. Геодезические задачи.
Прямая и обратная геодезические задачи
на плоские прямоугольные координаты.
4.3. Теодолитный ход, обработка
материалов теодолитного хода.
2.
исходноенаправление
4.1. Исходные направления, принятые в
геодезии. Углы ориентирования.
Ориентирование линий
Сущность
ориентирный
ориентирования:
угол
определить некоторое
направление
определяемое относительно другого
направление направления, принятого за
исходное.
Две задачи
ориентирования:
1. Определить исходное
направление
2.Определить ориентирный
угол
3.
а) Истинный (географический)меридиан - линия пересечения
плоскости, проходящей через точку
и ось вращения З. с земной
поверхностью (касательная к з.п.).
б) Магнитный меридиан –
определяется направлением
магнитной стрелки в данной
точке. Это направление непостоянно,
вертик. линия корд сетки
+γ
истинный меридиан
1. Исходные направления, принятые в геодезии
δ
-γ
магнитный
меридиан
А
Т
Ам
направлени
изменяется во времени.
в) Любое, важное для данного объекта, направление
может приниматься за условно-исходное (направление главных
путей на ж./д. станции; ось ж./д. моста и т.д.).
4.
2. Углы ориентирования.В зависимости от начальных направлений
и способа отсчета ориентирные углы имеют
свои названия.
Азимут А - горизонтальный угол,
отсчитываемый
от
северного
конца меридиана по ходу часовой
стрелки до данного направления
(A=0 - 360º).
При отсчете ориентирного угла от истинного
меридиана - азимут истинный – А
от магнитного меридиана- азимут
магнитный - Ам.
При этом А=Ам + δ.
Румб r - горизонтальный угол, отсчитываемый от
ближайшего конца меридиана до данного направления (r= 090°).
5.
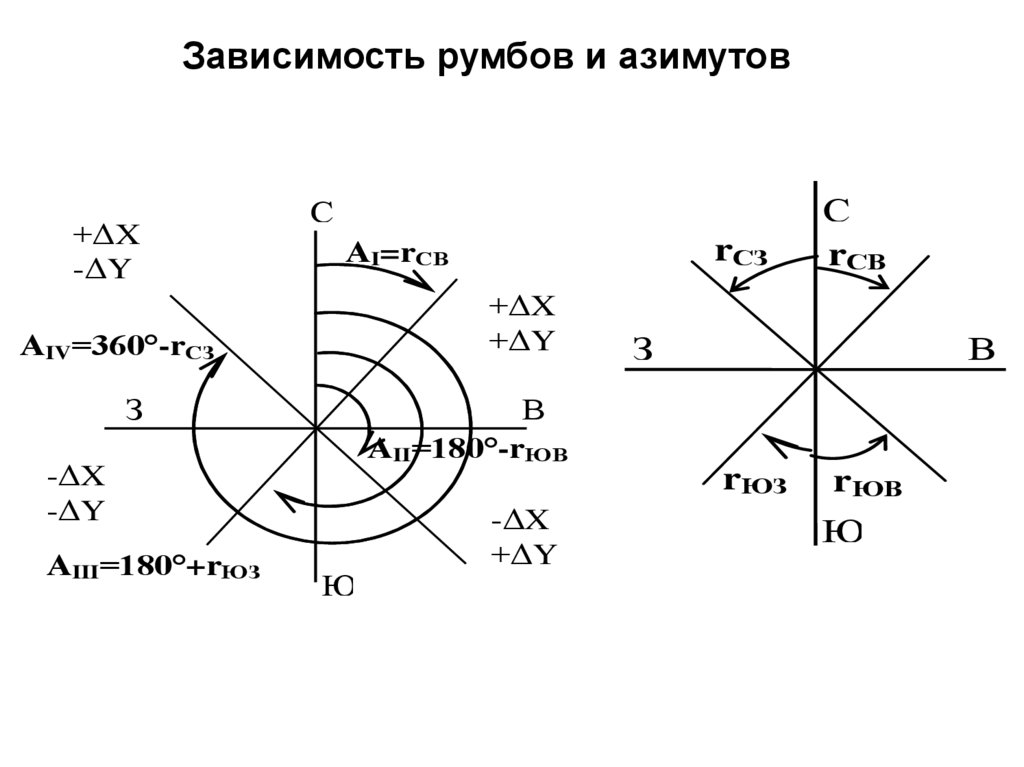
Зависимость румбов и азимутов+ΔX
-ΔY
С
АI=rСВ
+ΔX
+ΔY
АIV=360°-rСЗ
З
З
В
В
АII=180°-rЮВ
-ΔX
-ΔY
АIII=180°+rЮЗ
rСЗ
С
rСВ
rЮЗ
Ю
-ΔX
+ΔY
rЮВ
Ю
6.
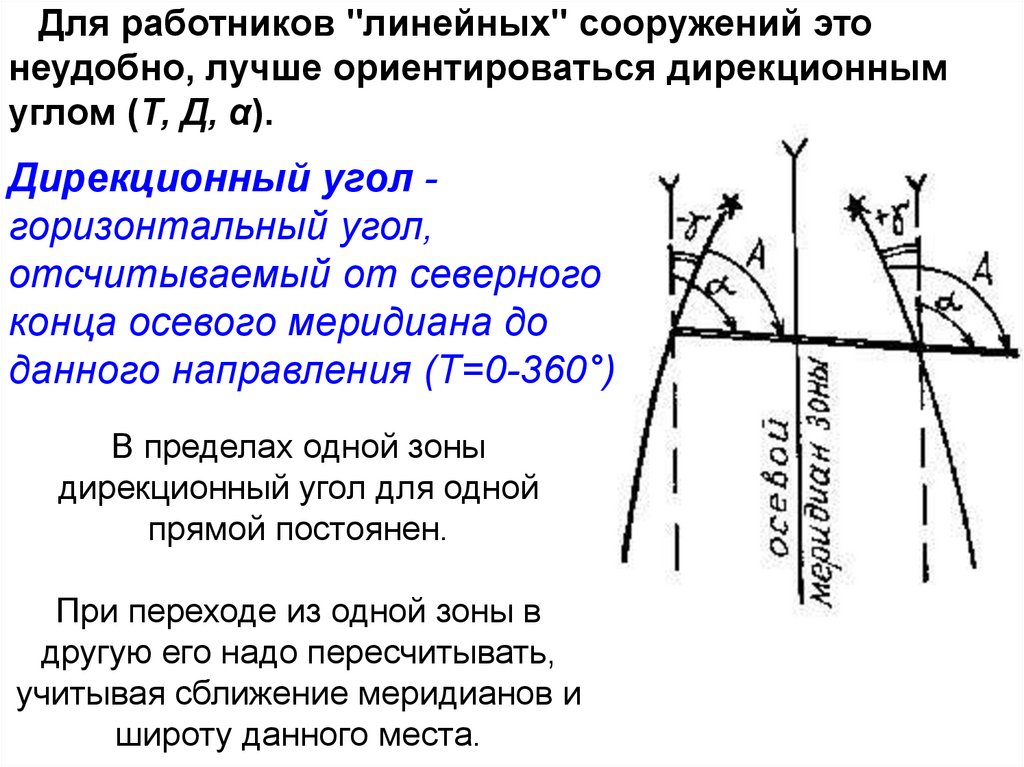
Для работников "линейных" сооружений этонеудобно, лучше ориентироваться дирекционным
углом (Т, Д, α).
Дирекционный угол горизонтальный угол,
отсчитываемый от северного
конца осевого меридиана до
данного направления (Т=0-360°).
В пределах одной зоны
дирекционный угол для одной
прямой постоянен.
При переходе из одной зоны в
другую его надо пересчитывать,
учитывая сближение меридианов и
широту данного места.
7.
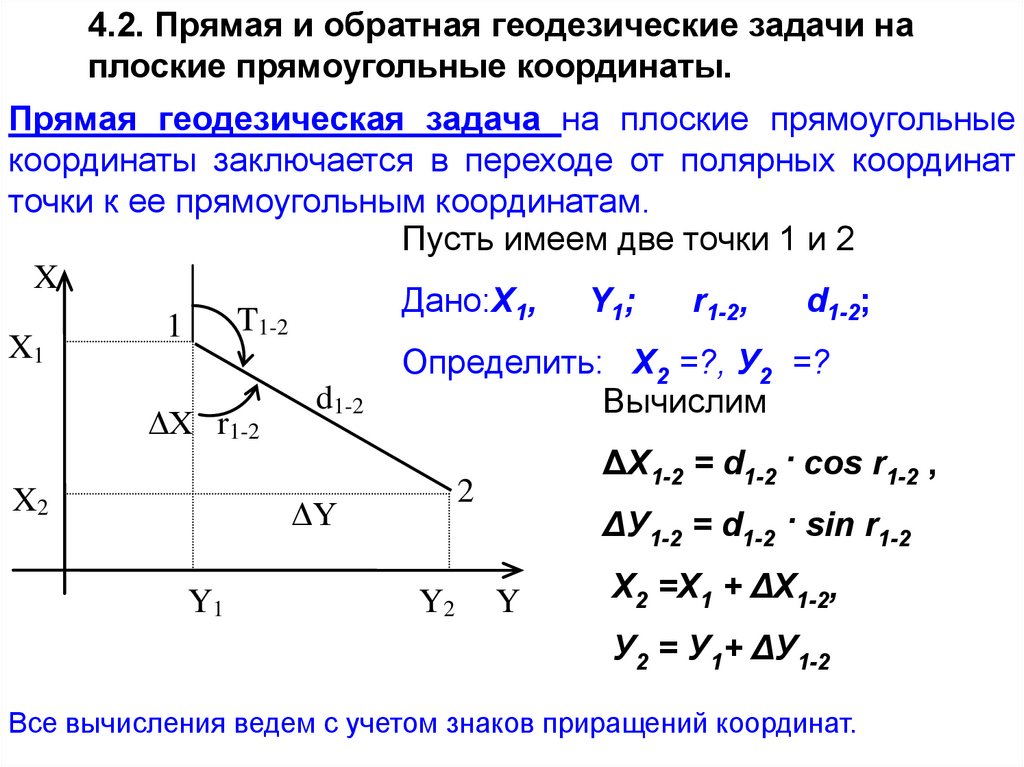
4.2. Прямая и обратная геодезические задачи наплоские прямоугольные координаты.
Прямая геодезическая задача на плоские прямоугольные
координаты заключается в переходе от полярных координат
точки к ее прямоугольным координатам.
Пусть имеем две точки 1 и 2
X
Дано:X1,
Y1;
r1-2,
d1-2;
T1-2
1
X1
Определить: X2 =?, У2 =?
d1-2
Вычислим
ΔX r1-2
ΔX1-2 = d1-2 · cos r1-2 ,
2
X2
ΔY
ΔУ = d · sin r
1-2
Y1
Y2
Y
1-2
X2 =X1 + ΔX1-2,
У2 = У1+ ΔУ1-2
Все вычисления ведем с учетом знаков приращений координат.
1-2
8.
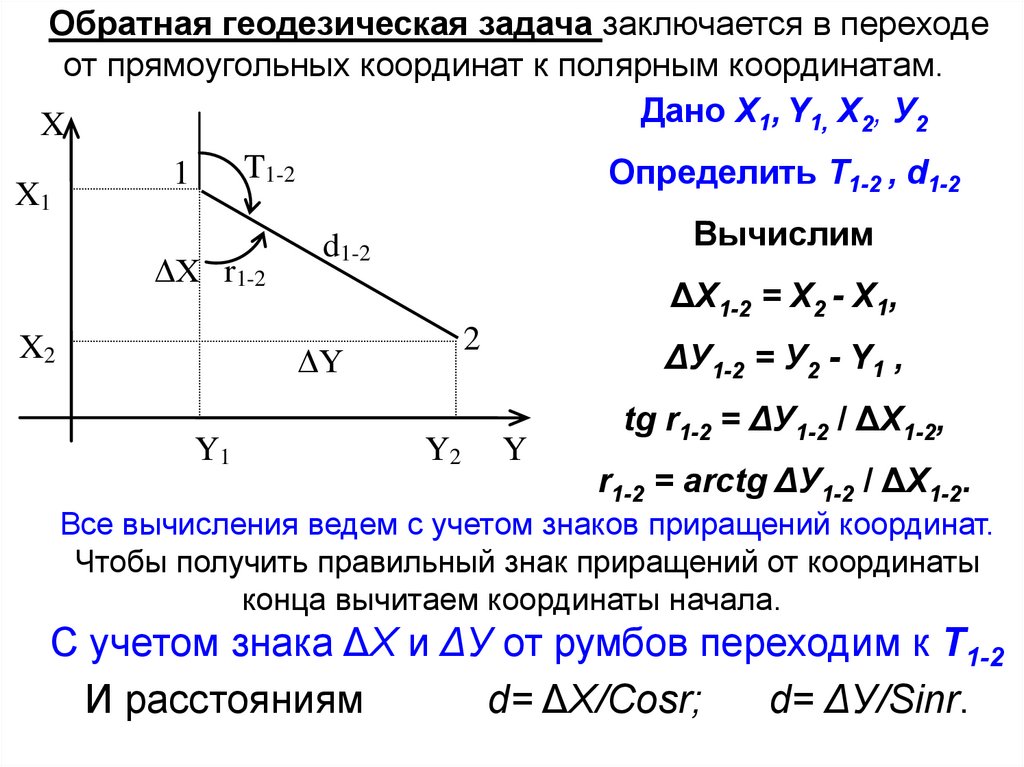
Обратная геодезическая задача заключается в переходеот прямоугольных координат к полярным координатам.
Дано X1, Y1, X2, У2
X
X1
Определить Т1-2 , d1-2
T1-2
1
ΔX r1-2
X2
Вычислим
d1-2
ΔX1-2 = X2 - X1,
2
ΔY
Y1
Y2
ΔУ1-2 = У2 - Y1 ,
Y
tg r1-2 = ΔУ1-2 / ΔX1-2,
r1-2 = arctg ΔУ1-2 / ΔX1-2.
Все вычисления ведем с учетом знаков приращений координат.
Чтобы получить правильный знак приращений от координаты
конца вычитаем координаты начала.
С учетом знака ΔX и ΔУ от румбов переходим к Т1-2
И расстояниям
d= ΔX/Cosr;
d= ΔУ/Sinr.
9.
4.3 Теодолитный ход, обработка материалов теодолитного хода.III
Теодолитным ходом называют
систему закрепленных на местности
точек, координаты которых
IV
определены из измерения углов β и
расстояний D.
DI-III
DI-II
II
DI-IV
DI-II
Создание теодолитного хода
I
DI-V
V
1. рекогносцировка (осмотр местности) – выполняют для определения
благоприятных мест закрепления вершин теодолитного хода и створов для
промеров углов и линий между ними.
2. измерение сторон и горизонтальных углов с зарисовкой абриса.
3. плановая привязка хода для передачи координат на точки и
дирекционных углов на линии теодолитного хода. Определяем положение
хотя бы одной точки хода относительно точек более высокого класса:
измеряют между ними расстояние и примычный угол.
4. первичная обработка результатов линейных и угловых измерений
(полевой контроль) выполняем в полевых журналах.
5. основная обработка выполняем после полевого контроля в ведомости
в камеральных условиях.
10.
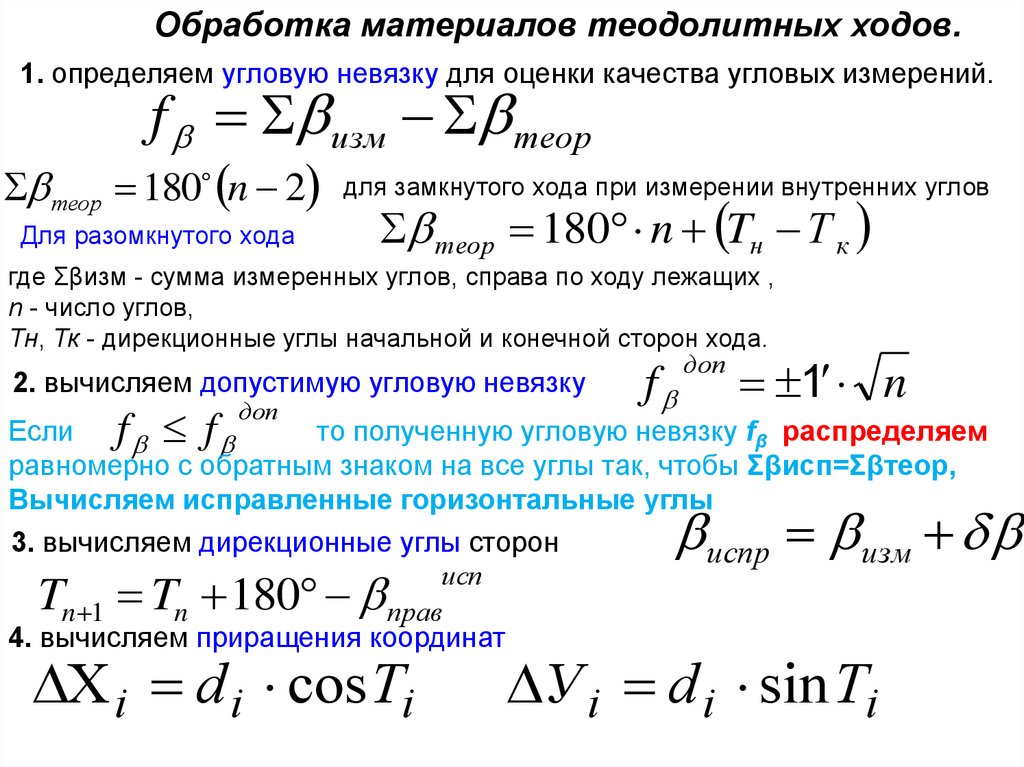
Обработка материалов теодолитных ходов.1. определяем угловую невязку для оценки качества угловых измерений.
f изм теор
теор 180 n 2
Для разомкнутого хода
для замкнутого хода при измерении внутренних углов
теор 180 n Tн Т к
где Σβизм - сумма измеренных углов, справа по ходу лежащих ,
n - число углов,
Тн, Тк - дирекционные углы начальной и конечной сторон хода.
2. вычисляем допустимую угловую невязку
доп
f
доп
1 n
Если f f
то полученную угловую невязку fβ распределяем
равномерно с обратным знаком на все углы так, чтобы Σβисп=Σβтеор,
Вычисляем исправленные горизонтальные углы
3. вычисляем дирекционные углы сторон
испр
изм
Tn 1 Tn 180
исп
прав
4. вычисляем приращения координат
i d i cos Ti
У i d i sin Ti
11.
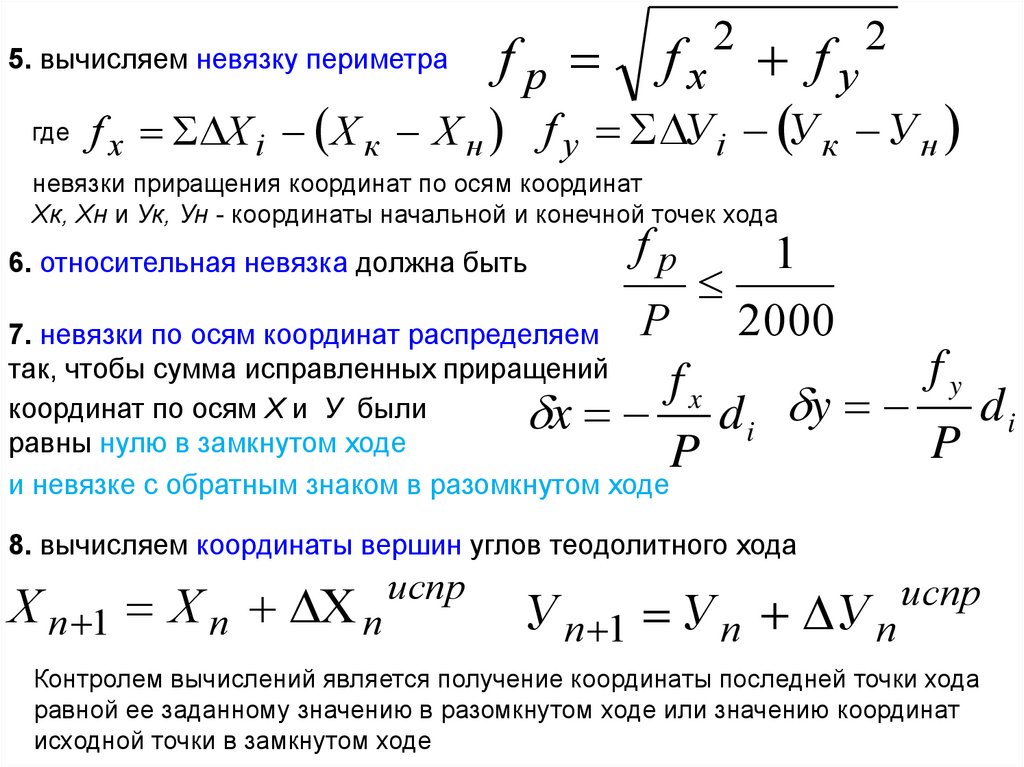
2f p fx fy
f x X i X к Х н f у У i У к У н
5. вычисляем невязку периметра
где
2
невязки приращения координат по осям координат
Хк, Хн и Ук, Ун - координаты начальной и конечной точек хода
fp
1
2000
7. невязки по осям координат распределяем P
так, чтобы сумма исправленных приращений
fy
f
x
координат по осям X и У были
y
d
x
d
i
i
равны нулю в замкнутом ходе
P
P
6. относительная невязка должна быть
и невязке с обратным знаком в разомкнутом ходе
8. вычисляем координаты вершин углов теодолитного хода
X n 1 X n n
испр
У n 1 У n У n
испр
Контролем вычислений является получение координаты последней точки хода
равной ее заданному значению в разомкнутом ходе или значению координат
исходной точки в замкнутом ходе