







 physics
physicsSimilar presentations:








")

Анализ и синтез многосвязных систем управления
1. Курс анализ и синтез многосвязных систем управления лк – 18 час, пр –54 час, кр, экзамен
АНАЛИЗ И СИНТЕЗМНОГОСВЯЗНЫХ СИСТЕМ
УПРАВЛЕНИЯ
КУРС
ЛК – 18 ЧАС, ПР –54 ЧАС, КР, экзамен
2.
Литература1.
2.
3.
4.
5.
Буков В.Н. Буков В. Н. Вложение систем. Аналитический подход к анализу и синтезу
матричных систем / В.Н. Буков. –Калуга: Изд-во научн. лит. Н. Ф. Бочкаревой, 2006. –720 с.
Афанасьев В. Н., Колмановский Б. В., Носов В. Р. Математическая теория конструирования
систем управления. М., Высшая школа, 2003 (3-е издание).
Асанов А. З. Технология вложения систем и ее приложения к задачам анализа и синтеза
систем: учебное пособие / А.З. Асанов. – М.: МИРЭА–Российский технологический
университет, 2019. –128 с.
Асанов А.З. Канонизация матриц и ее приложения в задачах управления [Электронный
ресурс]: учебное пособие / А.З. Асанов. – М.: МИРЭА–Российский технологический
университет, 2019. –1 электрон. опт. диск (CD-ROM)
Первозванский А. А. Курс теории автоматического управления. (изд. 2) М.: Наука, 2010. 624
с.
2
3.
Основные вопросы лекции #11. Основные формы математических моделей динамических
систем
2. Постановка задачи синтеза регуляторов SISO-систем.
3. Постановка задачи синтеза регуляторов MIMO-систем.
4. Основные этапы решения задачи синтеза систем управления.
5. Классификация современных задач\систем управления.
6. Модели динамических систем.
7. Структурные свойства динамических систем.
3
4.
Классическая теория управления: задачи, методы, объектыf
g
Регулятор
u
Объект
управления
y
Обратная связь
SISO - системы
Современная теория управления: задачи, методы, объекты
u1
u2
y1
S
y2
MIMO - системы
4
5.
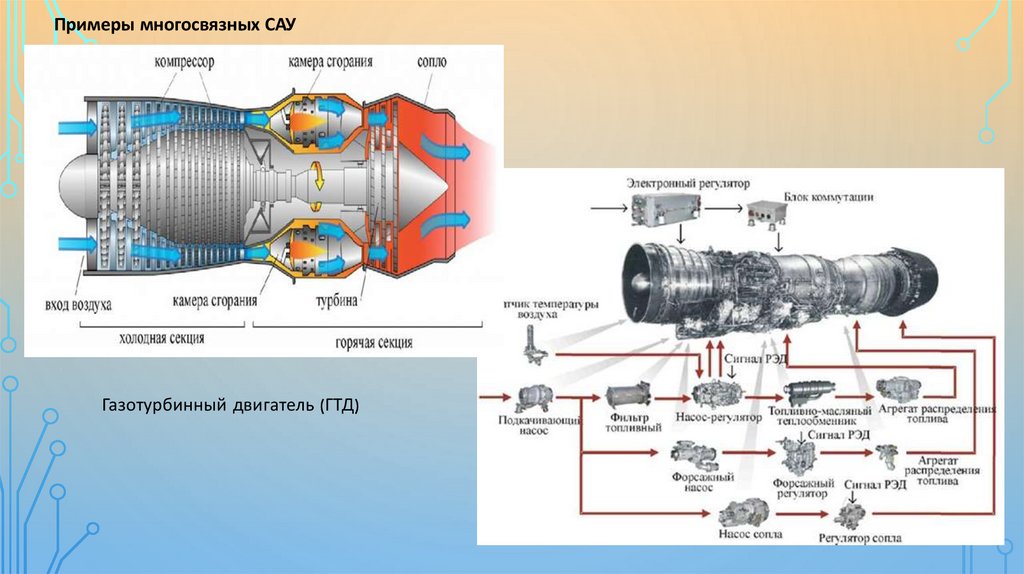
Примеры многосвязных САУГазотурбинный двигатель (ГТД)
5
6.
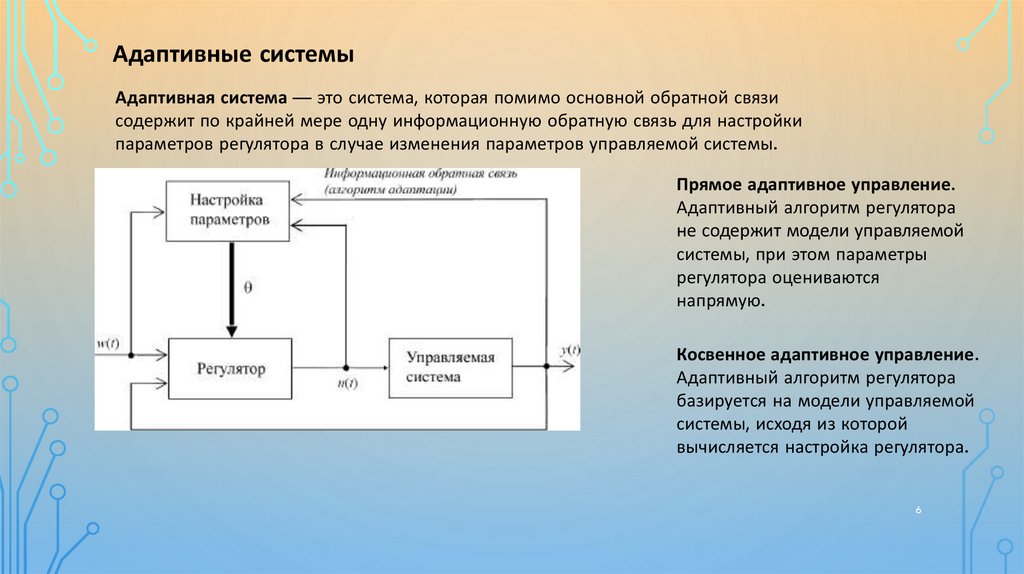
Адаптивные системыАдаптивная система — это система, которая помимо основной обратной связи
содержит по крайней мере одну информационную обратную связь для настройки
параметров регулятора в случае изменения параметров управляемой системы.
Прямое адаптивное управление.
Адаптивный алгоритм регулятора
не содержит модели управляемой
системы, при этом параметры
регулятора оцениваются
напрямую.
Косвенное адаптивное управление.
Адаптивный алгоритм регулятора
базируется на модели управляемой
системы, исходя из которой
вычисляется настройка регулятора.
6
7.
Адаптивные системы с идентификатором.Адаптивные системы с идентификатором
соответствуют косвенному адаптивному
управлению.
Адаптивные системы с эталонной моделью.
Такие системы работают по принципу
прямого адаптивного управления.
7
8.
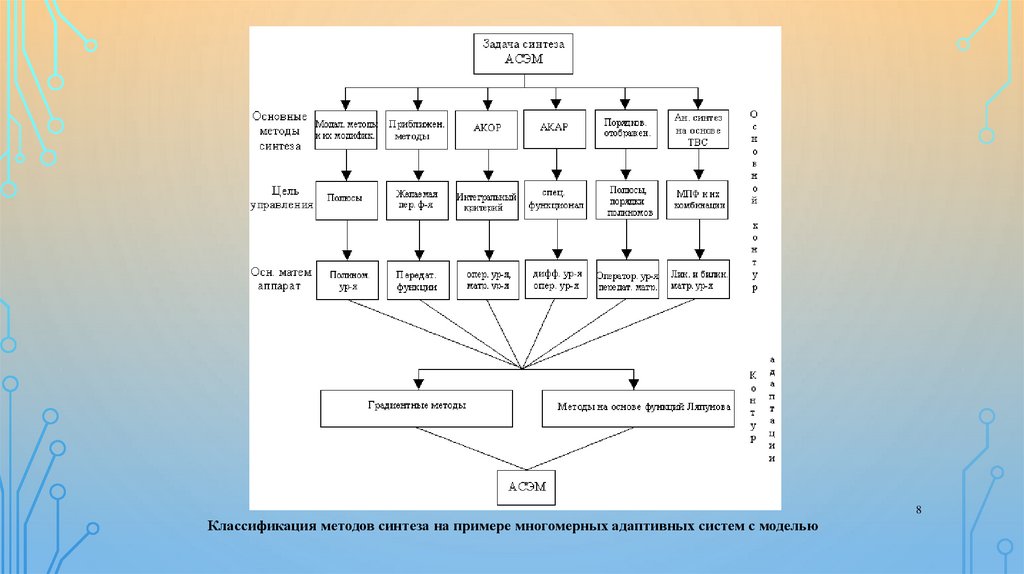
8Классификация методов синтеза на примере многомерных адаптивных систем с моделью
9.
система – целостное упорядоченное множествостабильно связанных и устойчиво взаимодействующих
в пространстве и во времени элементов, формирующих
ее некоторые интегративные свойства и
функционирующих совместно для достижения
определенной цели, стоящей перед данной системой.
Динамическая система – это система, изменяющая под
воздействием внешних сил свое состояние, характеризуемое
значениями выходных переменных, т.е. в динамических системах
взаимодействия происходят во времени.
9
10.
Для динамических систем справедливы следующие аксиоматическиеутверждения, качественный смысл которых заключается в
следующем:
Если известно начальное состояние в момент t0 и если приложить к
динамической системе известные входные воздействия u(t ) в течение
t0 , t , t t0 , то формируется выходная реакция динамической
системы y (t ) , определяемая единственным образом.
Иначе говоря, для предсказания выходной реакции на интервале
t0 , t в случае, когда известно начальное состояние систем, при t t0
не требуется знание входного воздействия в моменты времени,
предшествующие t0 . При этом достаточно знания лишь состояния в
момент u(t ) , t t0 . Будущие знания входных воздействий также не
влияют на y (t ) , t t0 , т.е. система не обладает свойством
«предвидения».
Существует множество состояний динамической системы, и поэтому
можно выбрать для расчёта любую пару вход–выход (входное
воздействие – выходная реакция). Знания начального состояния x(t0 )
и воздействий u(t ) , t t0 , t достаточно не только для того, чтобы
определить выходную реакцию y( ) , t0 t , но и состояние
динамической системы в момент времени , x( ) , t0 t .
10
11.
Это важное свойство означает, что состояние в любой моментвремени суммирует всю прошлую информацию, требующуюся для
того, чтобы предсказать будущий выходной сигнал и будущее
состояние системы.
Малые изменения входных воздействий или состояния динамической
системы вызывают соответствующие малые изменения выходных
реакций и движения системы
Напоминание !!!
Повтор самостоятельно !
Математическая модель динамической системы – это
совокупность математических уравнений, формул, соотношений,
описывающая процессы, происходящие в исследуемой динамической
системе
11
12.
Наиболеечасто
используемые,
наиболее
эффективные
способы
описания
Динамических систем
1)
2)
вход – выходное описание (модель типа «вход – выход»):
дифференциальное уравнение;
операторное уравнение;
передаточная функция;
описание в пространстве состояний (модель типа «вход – состояние – выход»).
Исходным описанием всегда является поэлементная модель, трансформируя которую
можно получить модель любого типа
12
13.
dnyd n 1 y
dy
d mu
d m 1u
du
an n an 1 n 1 ... a1 a0 y bm m bm 1 m 1 ... b1 b0u
dt
dt
dt
dt
dt
dt
где u(t ) и y (t ) – входной и выходной скалярные переменные,
ai , i 0, n и b j , j 0, m – постоянные скалярные коэффициенты
SISO - системы
dny
d n 1 y
dy
d mu
d m 1u
du
An n An 1 n 1 ... A1 A0 y Bm m Bm 1 m 1 ... B1 B0u
dt
dt
dt
dt
dt
dt
где u(t ) вектор входа, y (t ) – вектор выхода, A0 ,..., An и B0 ,..., Bm –
матрицы
Обобщенно
MIMO - системы
dn
dm
d n 1
d
d m 1
d
An n An 1 n 1 ... A1 A0 y Bm m Bm 1 m 1 ... B1 B0 u
dt
dt
dt
dt
dt
dt
13
14.
Решение может быть записано в виде:,
y(t ) yсв (t ) yвы (t )
где yсв (t ) свободная составляющая решения; yвы (t ) вынужденная
составляющая решения
Поиск решения уравнения системы это одна из основных задач теории систем
Мощным инструментом решения обыкновенных дифференциальных уравнений является
операционное исчисление, где используется интегральное преобразование Лапласа
Y ( p) L y (t )
y (t ) e pt dt
0
A p
n
n
An 1 p n 1 ... A1 p A0 Y ( p ) y0 ( p ) Bm p m Bm 1 p m 1 ... B1 p B0 U ( p ) y0 ,
14
15.
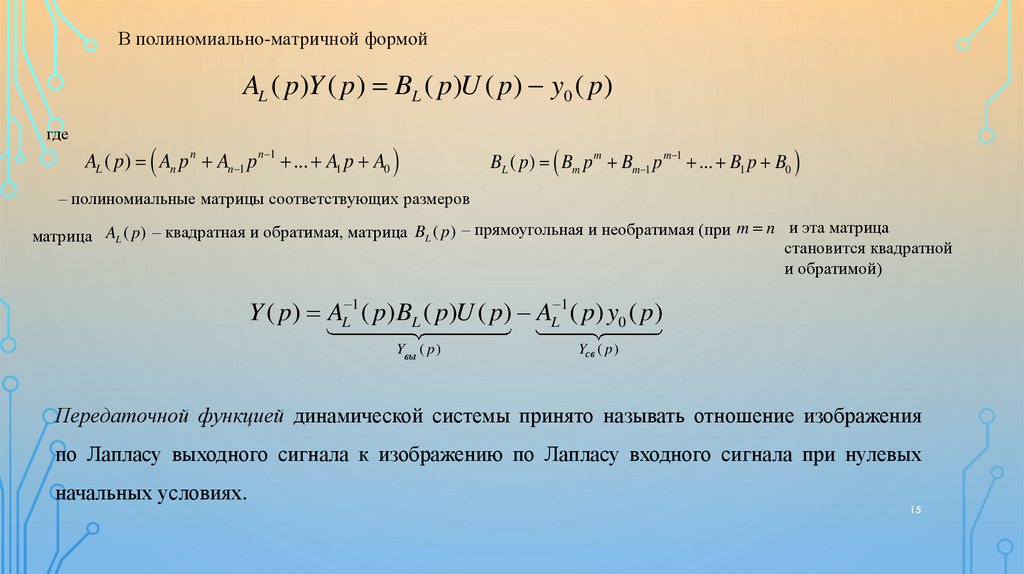
В полиномиально-матричной формойAL ( p)Y ( p) BL ( p)U ( p) y0 ( p )
где
AL ( p) An p n An 1 p n 1 ... A1 p A0
BL ( p) Bm p m Bm 1 p m 1 ... B1 p B0
– полиномиальные матрицы соответствующих размеров
и эта матрица
матрица AL ( p ) – квадратная и обратимая, матрица BL ( p ) – прямоугольная и необратимая (при m n
становится квадратной
и обратимой)
Y ( p) AL 1 ( p) BL ( p)U ( p) AL 1 ( p) y0 ( p)
Yвы ( p )
Yсв ( p )
Передаточной функцией динамической системы принято называть отношение изображения
по Лапласу выходного сигнала к изображению по Лапласу входного сигнала при нулевых
начальных условиях.
15
16.
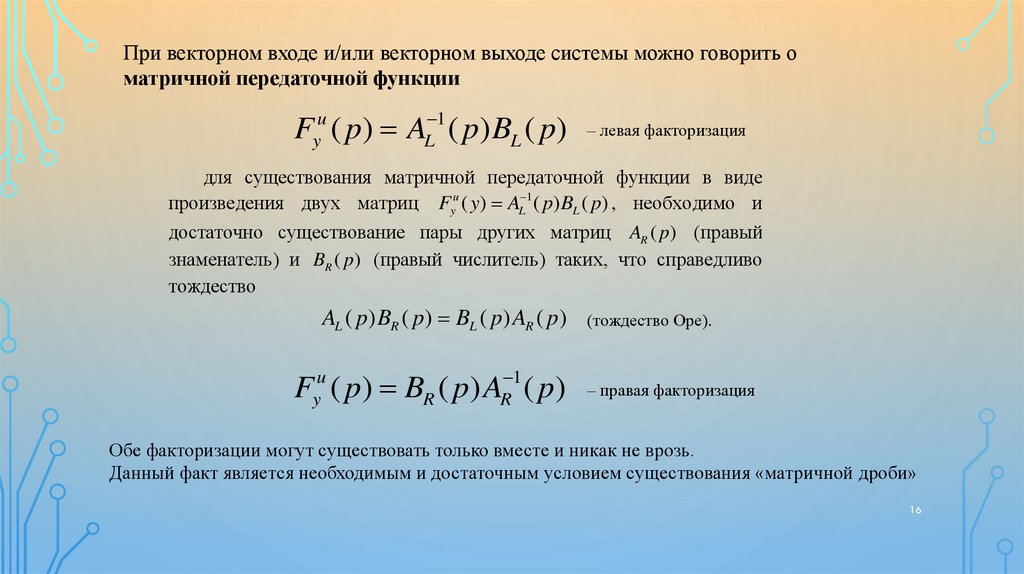
При векторном входе и/или векторном выходе системы можно говорить оматричной передаточной функции
Fyu ( p) AL 1 ( p) BL ( p)
– левая факторизация
для существования матричной передаточной функции в виде
произведения двух матриц Fyu ( y) AL 1 ( p) BL ( p) , необходимо и
достаточно существование пары других матриц AR ( p) (правый
знаменатель) и BR ( p) (правый числитель) таких, что справедливо
тождество
AL ( p) BR ( p) BL ( p) AR ( p)
1
R
F ( p) BR ( p) A ( p)
u
y
(тождество Оре).
– правая факторизация
Обе факторизации могут существовать только вместе и никак не врозь.
Данный факт является необходимым и достаточным условием существования «матричной дроби»
16
17.
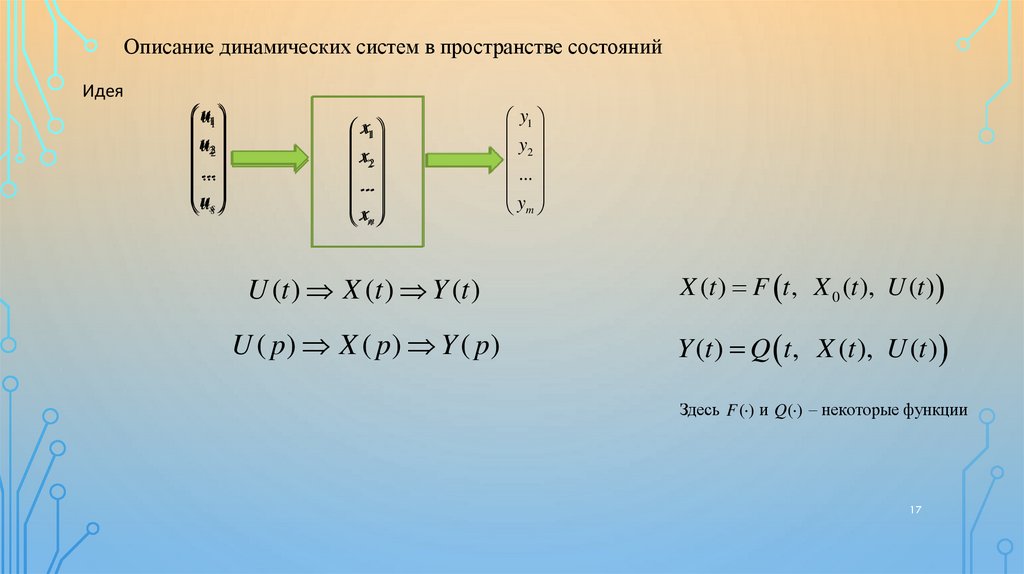
Описание динамических систем в пространстве состоянийИдея
u111
u222
...
usss
x11
x
22
...
xnn
y1
y
2
...
ym
U (t ) X (t ) Y (t )
X (t ) F t , X 0 (t ), U (t )
U ( p) X ( p) Y ( p)
Y (t ) Q t , X (t ), U (t )
Здесь F ( ) и Q( ) – некоторые функции
17
18.
dX (t ) A(t ) X (t ) B(t )U (t ) при X (t0 ) x0
dt
Y (t ) C(t ) X (t ) D(t )U (t )
d
X (t ) AX (t ) BU (t )
dt
Y (t ) CX (t ) DU (t )
a11
a
A 21
...
an1
при
X (t0 ) x0
нестационарная динамическая система
стационарная динамическая система
an 2
... a1n
... a2 n
;
... ...
... ann
b11 b12
b
b
B 21 22
... ...
bn1 bn 2
... b1s
... b2 s
;
... ...
... bns
c11 c12
c
c22
C 21
... ...
cm1 ck 2
... c1n
... c2 n
;
... ...
... cmn
d11 d12
d
d 22
D 21
... ...
d k1 d k 2
... d1s
... d 2 s
.
... ...
... d ms
a12
a22
...
18
19.
dx1 (t )a11 x1 (t ) a12 x2 (t ) ... a1n xn (t ) b11u1 (t ) b12u2 (t ) ... b1su s (t )
dt
dx2 (t )
a21 x1 (t ) a22 x2 (t ) ... a2 n xn (t ) b21u1 (t ) b22u2 (t ) ... b2 sus (t )
dt
.................................................................................................................
dxn (t )
an1 x1 (t ) an 2 x2 (t ) ... ann xn (t ) bn1u1 (t ) bn 2u2 (t ) ... bnsus (t )
dt
y1 (t ) c11 x1 (t ) c12 x2 (t ) ... c1n xn (t ) d11u1 (t ) d12u2 (t ) ... d1su s (t )
y2 (t ) c21 x1 (t ) c22 x2 (t ) ... c2 n xn (t ) d 21u1 (t ) d 22u2 (t ) ... d 2 su s (t )
............................................................................................................
ym (t ) cm1 x1 (t ) cm 2 x2 (t ) ... cmn xn (t ) d m1u1 (t ) d m 2u2 (t ) ... d msu s (t )
19
20.
x1 a11d x2 a21
dt ... ...
xn an1
a12
a22
...
an 2
y1 c11 c12
y c
c22
2 21
... ... ...
ym cm1 cm 2
... a1n x1 b11 b12
... a2 n x2 b21 b22
... ... ... ... ...
... ann xn bn1 bn 2
cn x1 d11 d12
... c2 n x2 d 21 d 22
... ... ... ...
...
... cmn xn d m1 d m 2
...
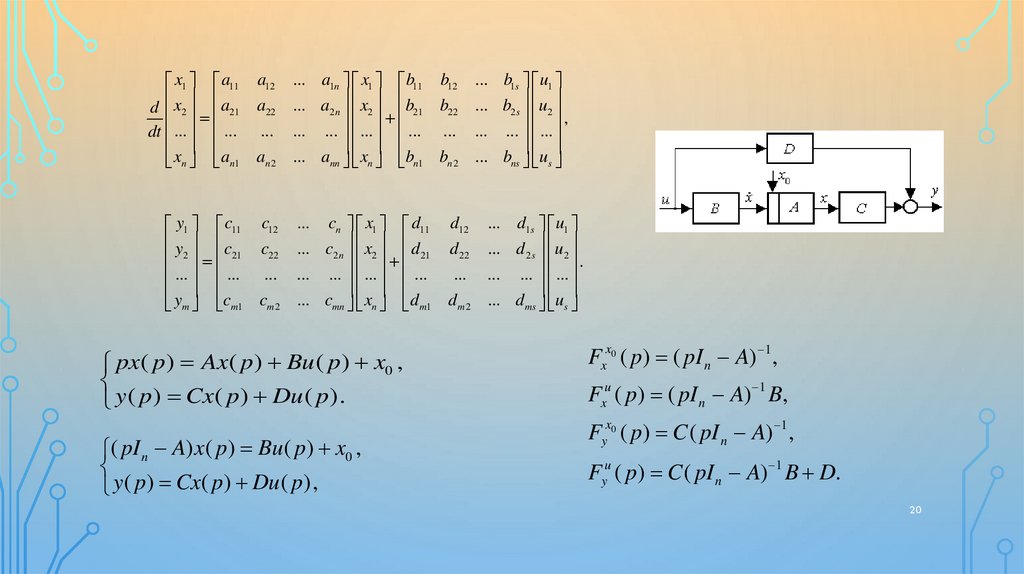
px( p) Ax( p) Bu ( p) x0 ,
y ( p) Cx( p ) Du ( p ).
( pI n A) x( p) Bu ( p) x0 ,
y ( p) Cx( p) Du ( p),
... b1s u1
... b2 s u2
,
... ... ...
... bns us
... d1s u1
... d 2 s u2
.
... ... ...
... d ms us
Fxx0 ( p) ( pI n A) 1 ,
Fxu ( p) ( pI n A) 1 B,
Fyx0 ( p) C ( pI n A) 1 ,
Fyu ( p) C ( pI n A) 1 B D.
20
21.
Вопросы для самостоятельной проработки1. Основные законы управления, их синтез и свойства для SISO-объектов [5];
2. Основные методы, математический аппарат для синтеза алгоритмов управления SISO-объектами [2];
3. Разработать математическую модель объекта управления (ОУ) (индивидуально, по вариантам):
• в пространстве состояний;
• в форме матричной передаточной функции;
• в форме проматрицы;
4. Обосновать\доказать адекватность полученных математических\компьютерных моделей;
5. Обосновать\доказать идентичность\соответствие различных форм математических моделей ОУ
21