
 physics
physicsSimilar presentations:

")








Математическая модель линейной динамической системы в форме проблемных матриц. Лекция #3
1.
Математическая модель линейной динамическойсистемы в форме проблемных матриц (проматриц)
Основные вопросы лекции #3
1. Формирование математической модели линейной динамической
системы в форме проблемных матриц (проматриц)
2. Свойства проматриц
3. Проматрицы типовых соединений систем
1
2.
x1 a11d x2 a21
dt ... ...
xn an1
... a1n x1 b11 b12
... a2 n x2 b21 b22
... ... ... ... ...
... ann xn bn1 bn 2
a12
a22
...
an 2
y1 c11 c12
y c
c22
2 21
... ... ...
ym cm1 cm 2
cn x1 d11
... c2 n x2 d 21
... ... ... ...
... cmn xn d m1
...
d12
d 22
...
dm2
... b1s u1 e11 e12
... b2 s u2 e21 e22
... ... ... ... ...
... bns us en1 en 2
... d1s u1 g11
... d 2 s u2 g 21
... ... ... ...
... d ms us g m1
g12
g 22
...
gm2
... e1k f1
... e2 k f 2
... ... ...
... enk f k
g1k f1
... g 2 k f 2
... ... ...
... g mk f k
...
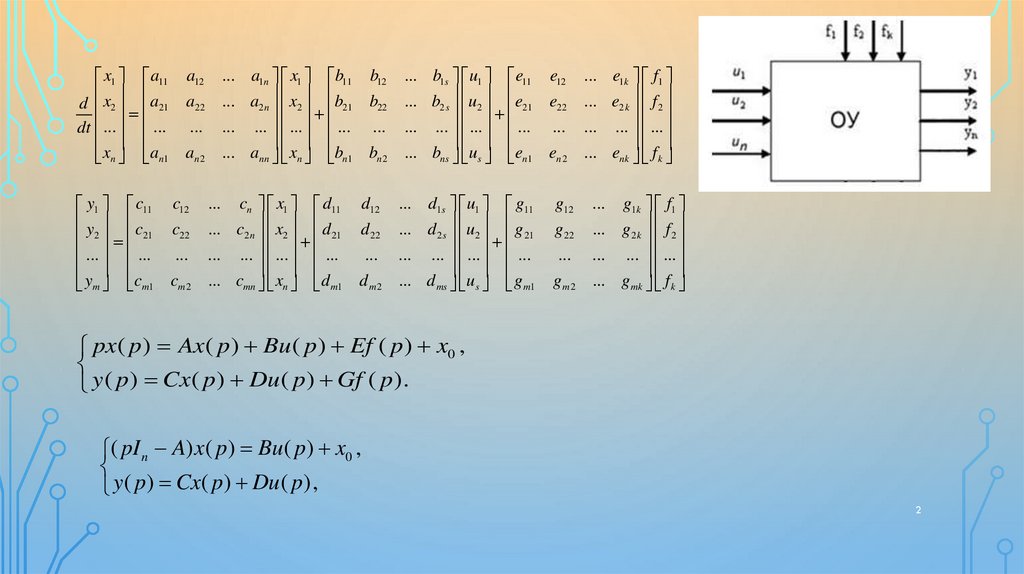
px( p ) Ax( p ) Bu ( p ) Ef ( p ) x0 ,
y ( p ) Cx( p ) Du ( p ) Gf ( p ).
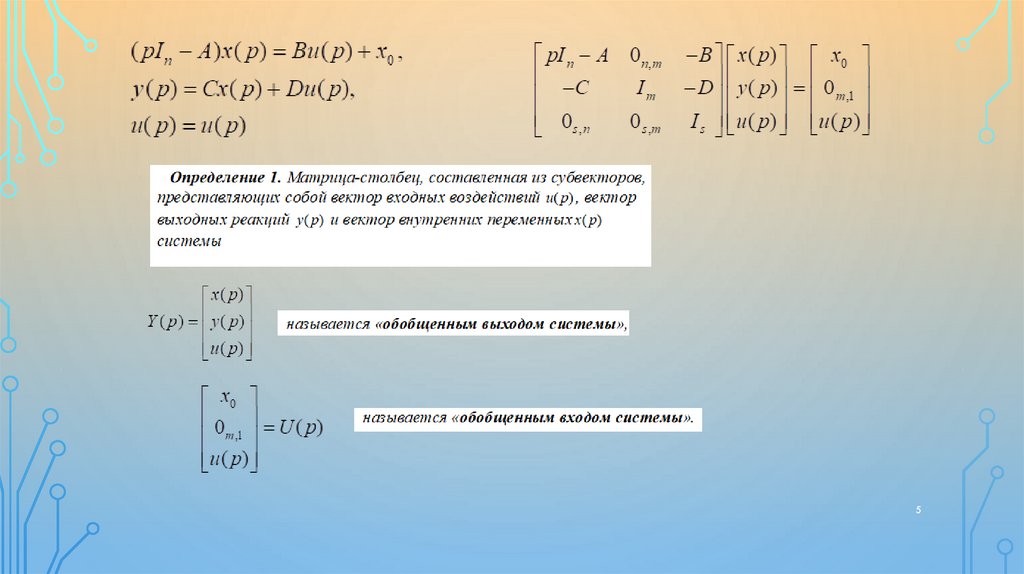
( pI n A) x( p) Bu ( p) x0 ,
y ( p) Cx( p) Du ( p),
2
3.
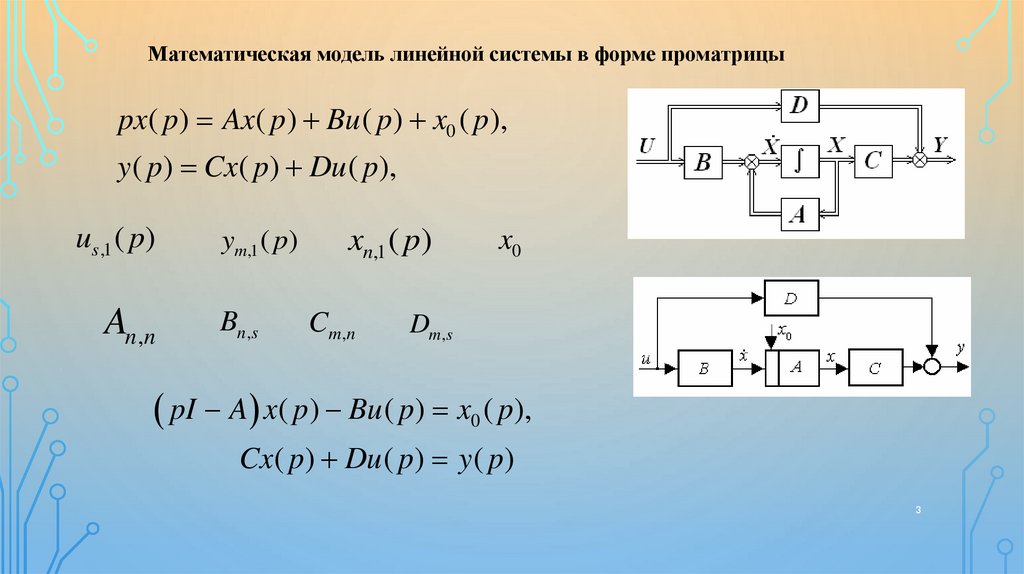
Математическая модель линейной системы в форме проматрицыpx( p) Ax( p) Bu ( p ) x0 ( p),
y ( p) Cx( p) Du ( p),
us ,1 ( p)
An,n
ym,1 ( p)
Bn,s
xn,1 ( p)
Cm,n
x0
Dm,s
pI A x( p) Bu ( p) x0 ( p),
Cx( p ) Du ( p ) y ( p )
3
4.
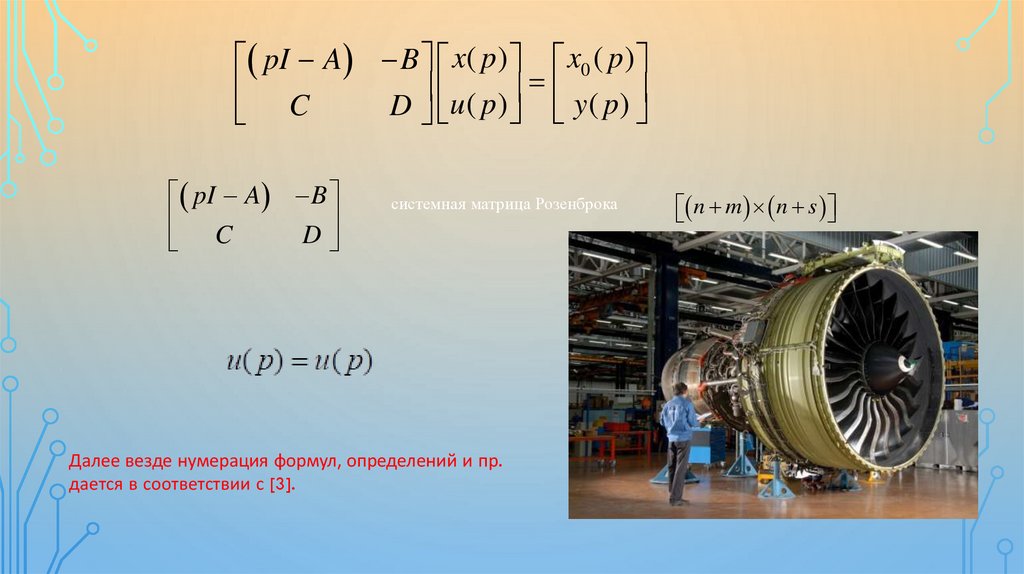
pI A B x( p ) x0 ( p )u ( p ) y ( p )
D
C
pI A B
D
C
системная матрица Розенброка
n m n s
Далее везде нумерация формул, определений и пр.
дается в соответствии с [3].
4
5.
56.
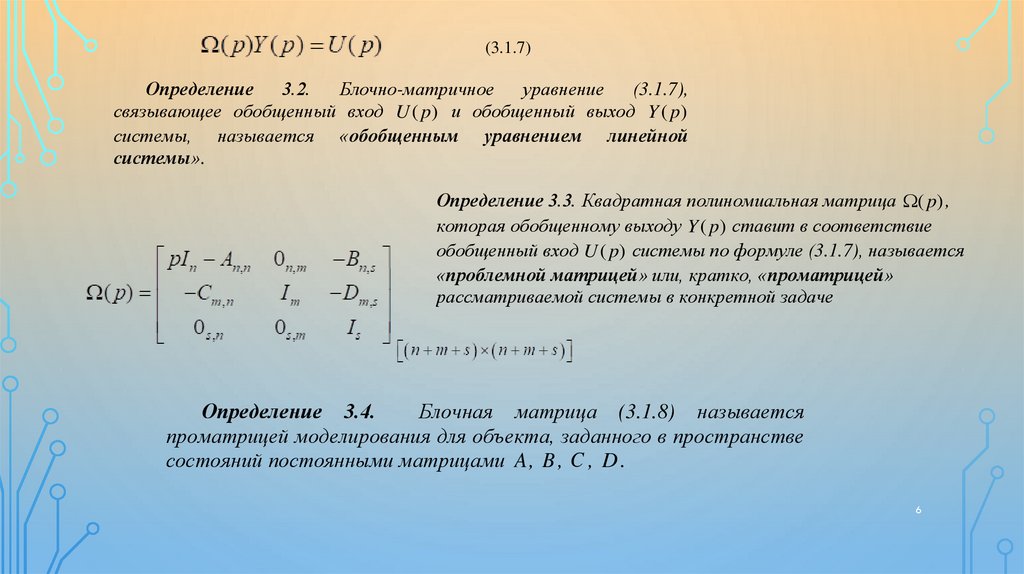
(3.1.7)Определение
3.2. Блочно-матричное уравнение (3.1.7),
связывающее обобщенный вход U ( p) и обобщенный выход Y ( p)
системы, называется «обобщенным уравнением линейной
системы».
Определение 3.3. Квадратная полиномиальная матрица ( p) ,
которая обобщенному выходу Y ( p) ставит в соответствие
обобщенный вход U ( p) системы по формуле (3.1.7), называется
«проблемной матрицей» или, кратко, «проматрицей»
рассматриваемой системы в конкретной задаче
Определение 3.4.
Блочная матрица (3.1.8) называется
проматрицей моделирования для объекта, заданного в пространстве
состояний постоянными матрицами A , B , C , D .
6
7.
Свойства проматрицы1.
Квадратность.
2. Невырожденность.
Эти свойства квадратности и невырожденности обеспечивают проматрице любой
задачи двустороннюю обратимость, так что обратная к ней матрица всегда единственна.
В основе этого важнейшего свойства проматриц лежит введенное дополнительное
регуляризирующее тождество.
3.
Автономность, т.е. все уравнения (коэффициенты исходных уравнений)
представлены в проматрице самостоятельными строками-уравнениями.
4.
Разреженность, т.е. большое количество нулевых элементов проматрицы, что может
значительно облегчить выполнение вычислительных процедур.
5. Универсальность – применимость для любой формы модели, т.е. в любой задаче
исследуемую или синтезируемую систему можно представить в форме обобщенного
уравнения и, следовательно, соответствующей проматрицы.
7
8.
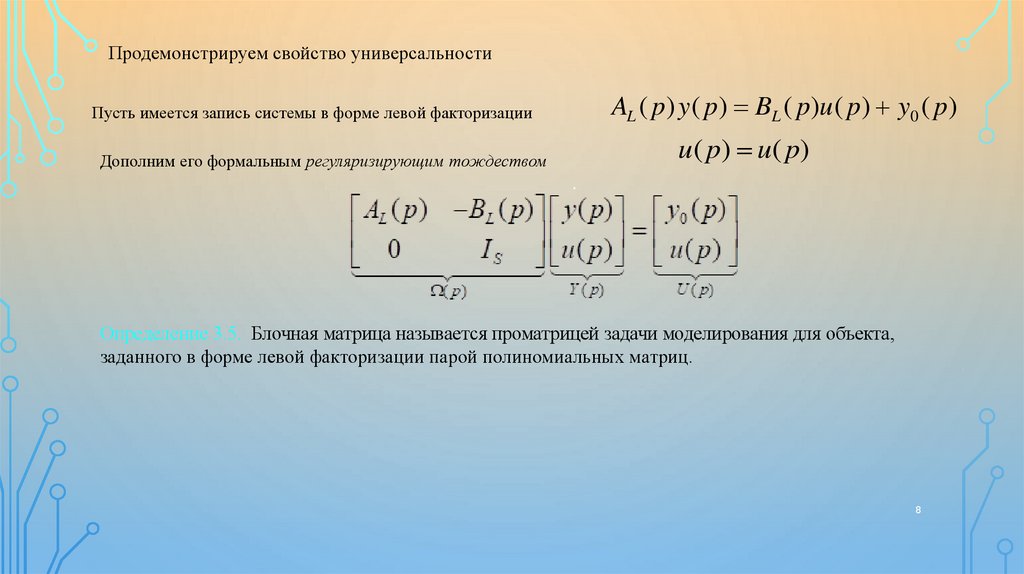
Продемонстрируем свойство универсальностиAL ( p) y ( p) BL ( p)u ( p) y0 ( p)
Пусть имеется запись системы в форме левой факторизации
u( p) u( p)
Дополним его формальным регуляризирующим тождеством
.
Определение 3.5. Блочная матрица называется проматрицей задачи моделирования для объекта,
заданного в форме левой факторизации парой полиномиальных матриц.
8
9.
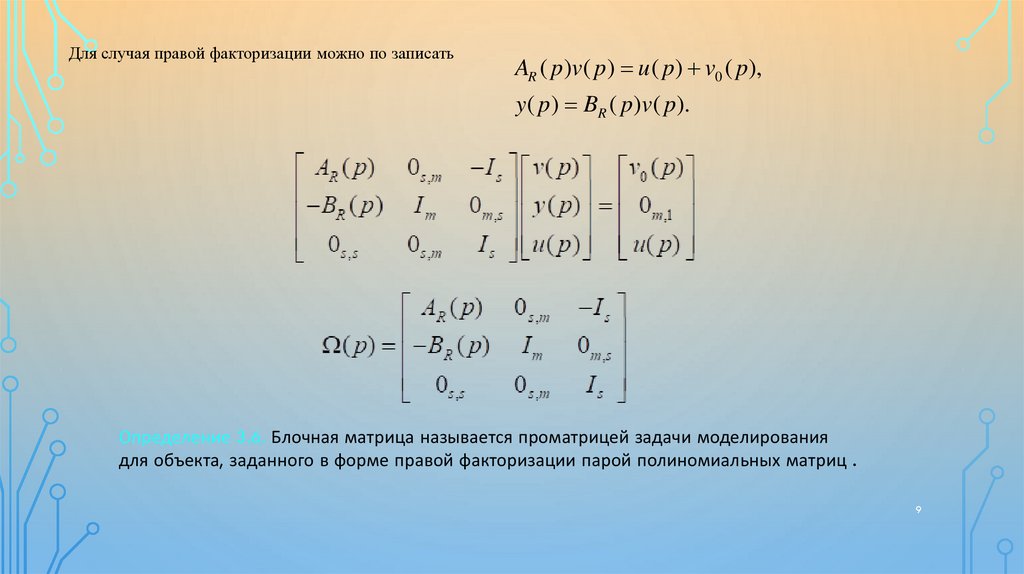
Для случая правой факторизации можно по записатьAR ( p)v( p) u ( p ) v0 ( p ),
y ( p) BR ( p)v( p).
Определение 3.6. Блочная матрица называется проматрицей задачи моделирования
для объекта, заданного в форме правой факторизации парой полиномиальных матриц .
9
10.
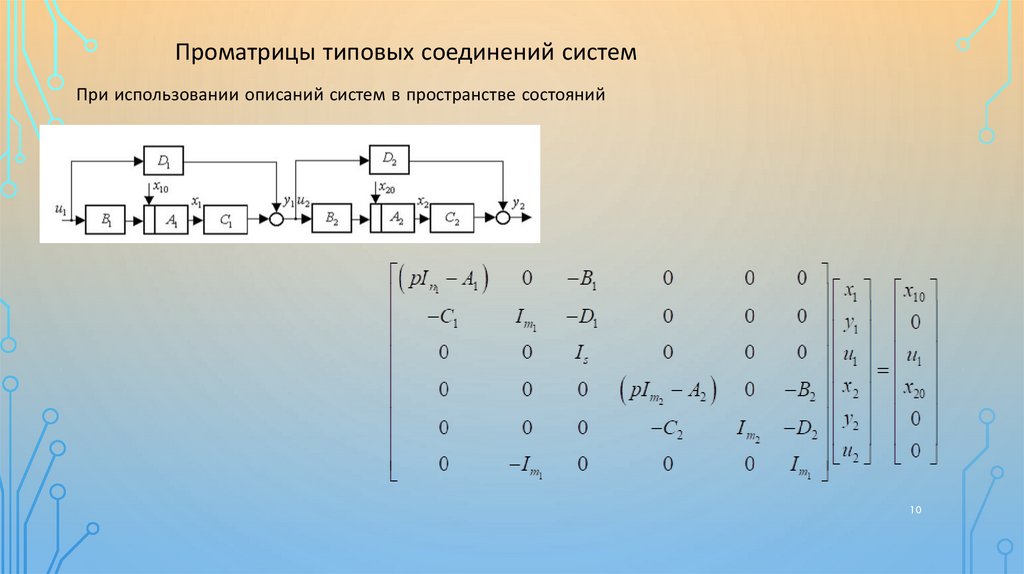
Проматрицы типовых соединений системПри использовании описаний систем в пространстве состояний
10
11.
pI n A11
C1
0
0
0
0
0
0
0
0
I m1
0
0
0
0
0
0
pI
n2
A1
0
C2
I m2
0
I m1
0
I m2
Im
0
0
0
0
B1
x1 x10
D1 y 0
1
B2 x2 x20
y 0
D2 2
y 0
0
u u
Is
11
12.
pI n A11
C1
0
0
0
0
0
0
B1
0
0
0
I m1
0
0
0
0
0
I s1
0
I m2
0
0
0
0
B2
0
0
C2
I m2
D2
I1
0
0
0
I s2
0
0
0
0
0
pI
n2
A2
0
x1 x10
0 y 0
1
Is 0
x x
0 2 20
y 0
0 2
u2 0
0
u u
I s
12
13.
Вопросы для самостоятельной проработки1. Основные законы управления, их синтез и свойства для SISO-объектов [4];
2. Основные методы, математический аппарат для синтеза алгоритмов управления SISO-объектами [2];
3. Разработать математическую модель объекта управления (ОУ) (индивидуально, по вариантам):
• в пространстве состояний;
• в форме матричной передаточной функции;
• в форме проматрицы;
4. Обосновать\доказать адекватность полученных математических\компьютерных моделей;
5. Обосновать\доказать идентичность\соответствие различных форм математических моделей ОУ
13