

























 physics
physicsSimilar presentations:




")
")




Типовые динамические звенья систем управления
1.
1Лекция №3
ТИПОВЫЕ
ДИНАМИЧЕСКИЕ ЗВЕНЬЯ
СИСТЕМ УПРАВЛЕНИЯ
2. П Л А Н Л Е К Ц И И: 1. Характеристика и классификация звеньев САУ. 2. Временные характеристики звеньев САУ 2.1. Усилительное
звено2.2. Дифференцирующее звено
2.3. Интегрирующее звено
2.4. Апериодическое звено
2.5. Колебательное звено
2.6. Запаздывание в САУ
2
3.
3. ТОЖДЕСТВЕННЫЕ ПРЕОБРАЗОВАНИЯСТРУКТУРНЫХ СХЕМ . ТИПОВЫЕ СОЕДИНЕНИЯ
(последовательное, параллельное, параллельноевстречное).
4. ПОНЯТИЕ УСТОЙЧИВОСТИ. КРИТЕРИИ
УСТОЙЧИВОСТИ.
4.
4Звеном СУ называется ее элемент, обладающий
определенными свойствами в динамическом
отношении.
Звенья регулирования могут иметь разную
физическую основу (электрические,
пневматические, механические и др. звенья), но
относится к одной группе.
Соотношение входных и выходных сигналов в
звеньях одной группы описываются одинаковыми
передаточными функциями.
5. 1. КЛАССИФИКАЦИЯ ЗВЕНЬЕВ САУ
5Звеном называется часть САУ, оператор
которой описывается дифференциальным
уравнением не выше второго порядка:
a2 y (t ) a1 y (t ) a0 y (t ) b2 x (t ) b1 x(t ) b0 x(t )
Применив преобразование Лапласа,
получим операторное уравнение звена:
(a2 p a1 p a0 )Y ( p ) (b2 p b1 p b0 ) X ( p )
2
2
6.
Классификация звеньевИДЕАЛЬНЫЕ ЗВЕНЬЯ
W( p ) k
- усилительное звено
W ( p ) kp - идеальное дифференцирующее
k - идеальное интегрирующее
W( p )
p
РЕАЛЬНЫЕ (ДИНАМИЧЕСКИЕ ) ЗВЕНЬЯ
W ( p ) k ( Tp 1 ) - форсирующее 1-го порядка
W ( p ) k ( T 2 p 2 2T p 1 ) - форсирующее
2-го порядка
9
7.
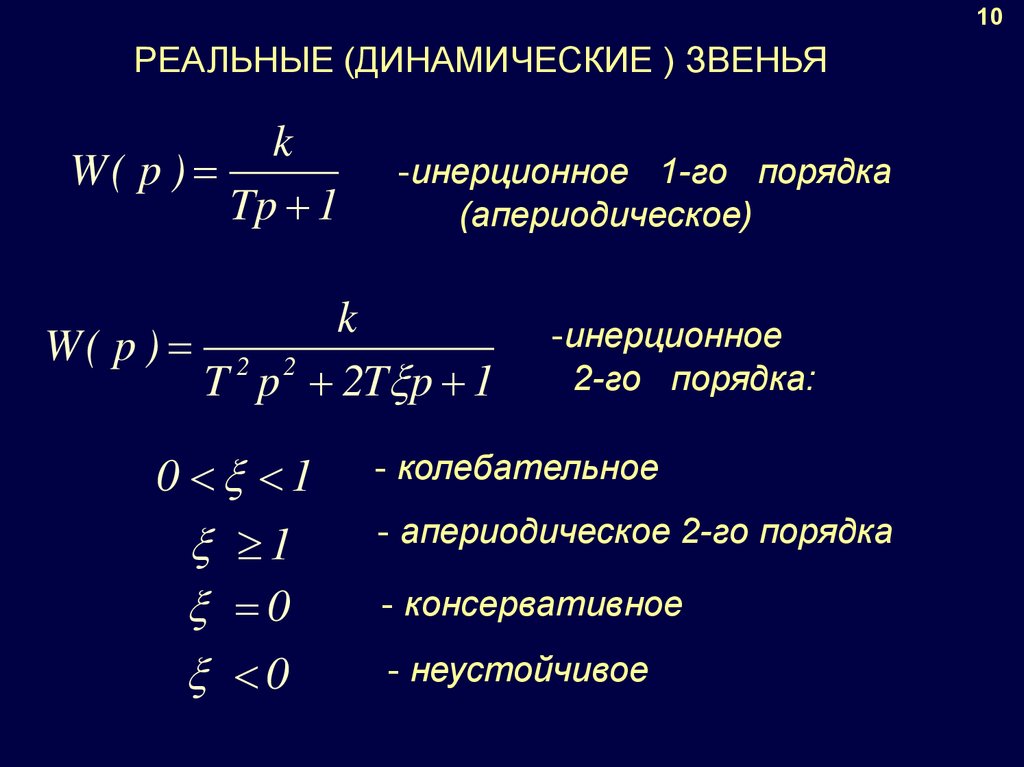
10РЕАЛЬНЫЕ (ДИНАМИЧЕСКИЕ ) ЗВЕНЬЯ
k
W( p )
Tp 1
-инерционное 1-го порядка
(апериодическое)
k
W( p ) 2 2
T p 2T p 1
0 1
1
0
0
-инерционное
2-го порядка:
- колебательное
- апериодическое 2-го порядка
- консервативное
- неустойчивое
8.
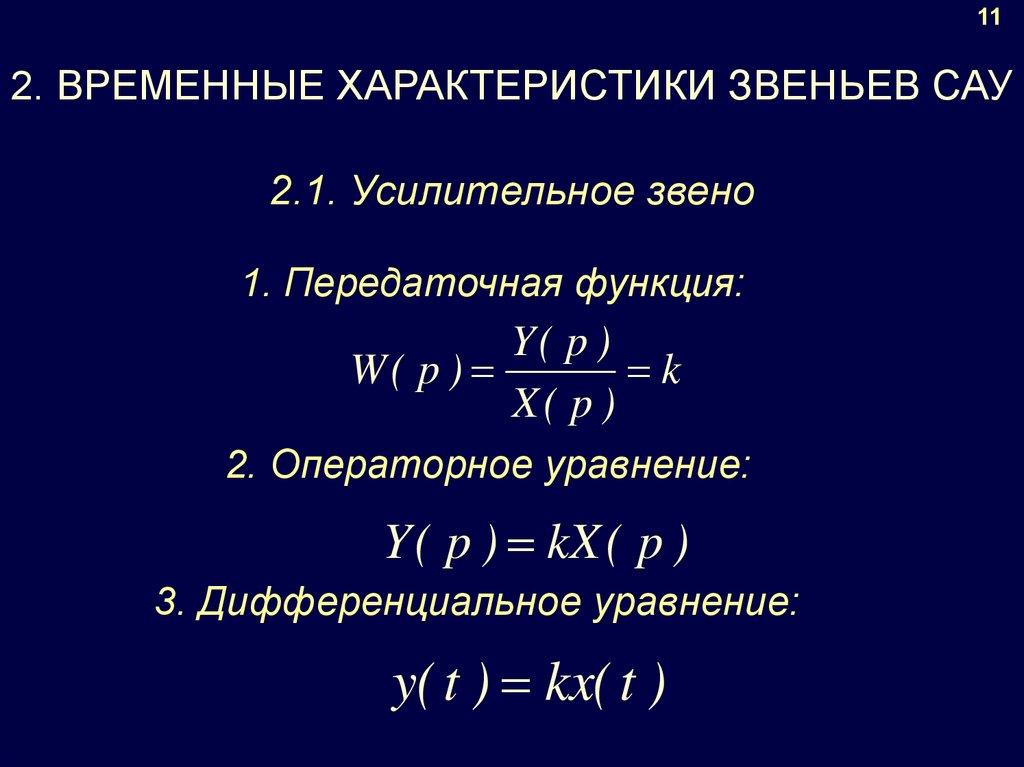
112. ВРЕМЕННЫЕ ХАРАКТЕРИСТИКИ ЗВЕНЬЕВ САУ
2.1. Усилительное звено
1. Передаточная функция:
Y( p )
W( p )
k
X( p )
2. Операторное уравнение:
Y ( p ) kX ( p )
3. Дифференциальное уравнение:
y( t ) kx( t )
9.
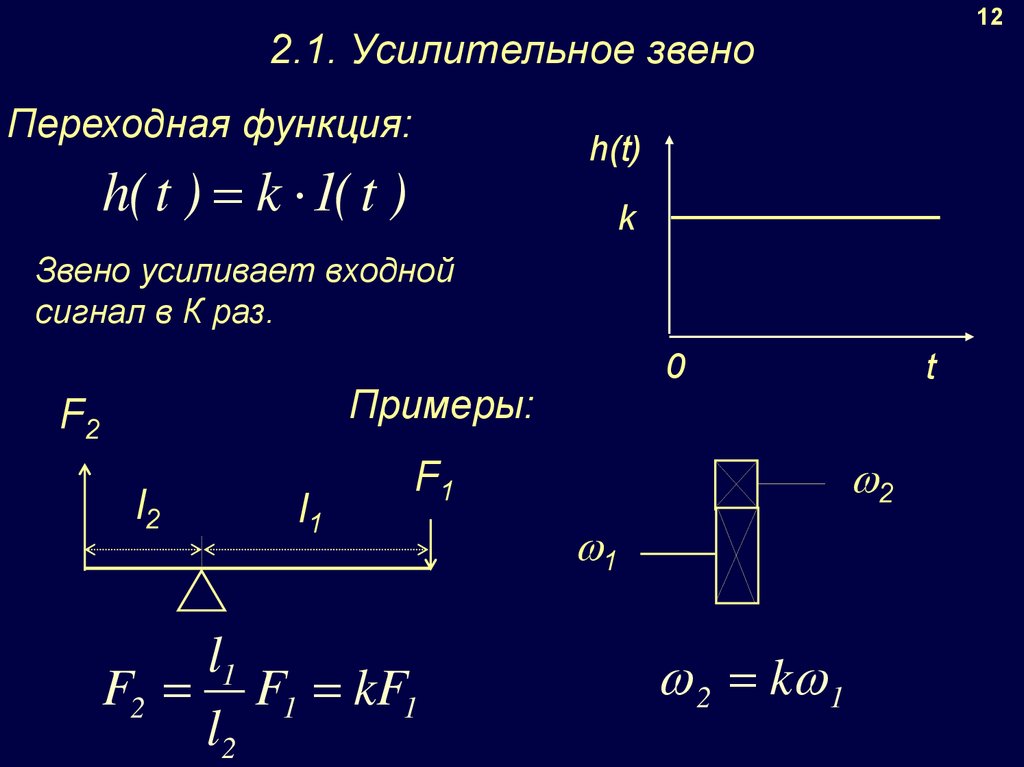
122.1. Усилительное звено
Переходная функция:
h(t)
h( t ) k 1( t )
k
Звено усиливает входной
сигнал в К раз.
0
Примеры:
F2
l2
l1
2
F1
l1
F2 F1 kF1
l2
t
1
2 k 1
10.
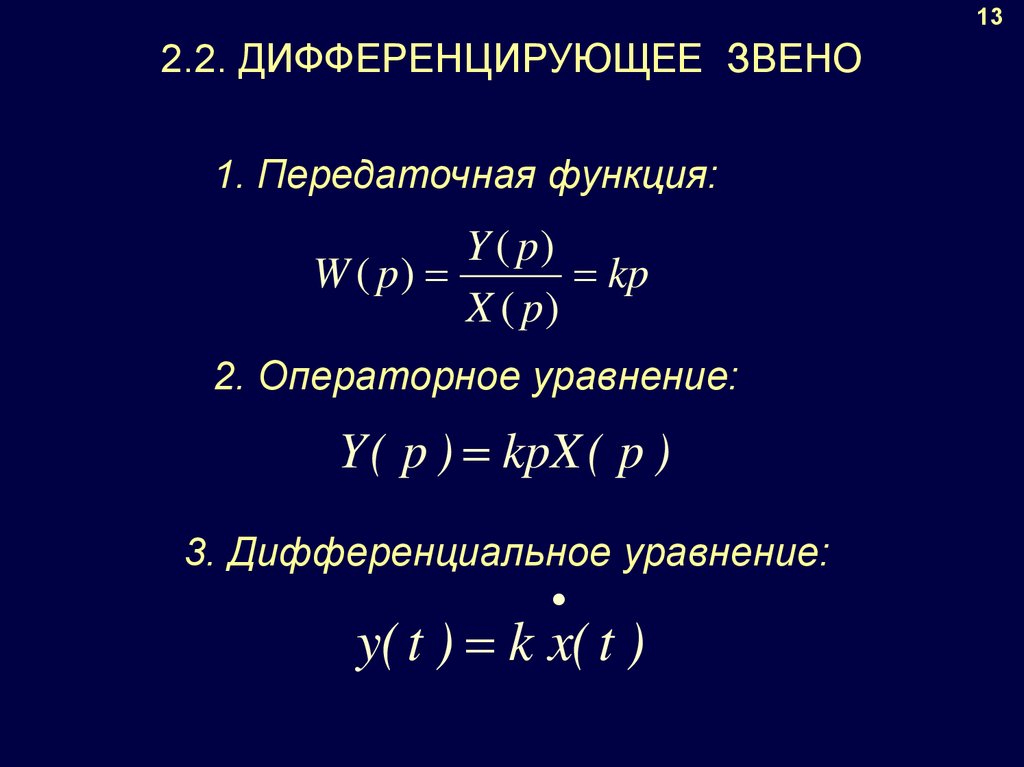
132.2. ДИФФЕРЕНЦИРУЮЩЕЕ ЗВЕНО
1. Передаточная функция:
Y ( p)
W ( p)
kp
X ( p)
2. Операторное уравнение:
Y ( p ) kpX ( p )
3. Дифференциальное уравнение:
y( t ) k x( t )
11.
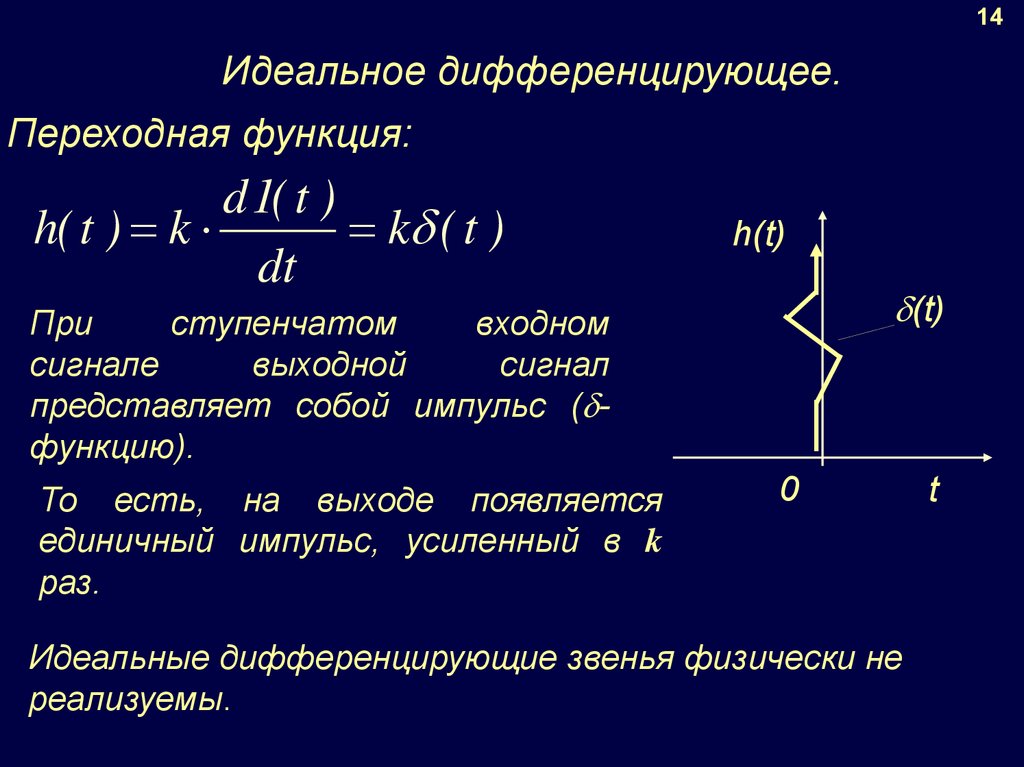
14Идеальное дифференцирующее.
Переходная функция:
d 1( t )
h( t ) k
k ( t )
dt
h(t)
(t)
При
ступенчатом
входном
сигнале
выходной
сигнал
представляет собой импульс ( функцию).
То есть, на выходе появляется
единичный импульс, усиленный в k
раз.
0
Идеальные дифференцирующие звенья физически не
реализуемы.
t
12.
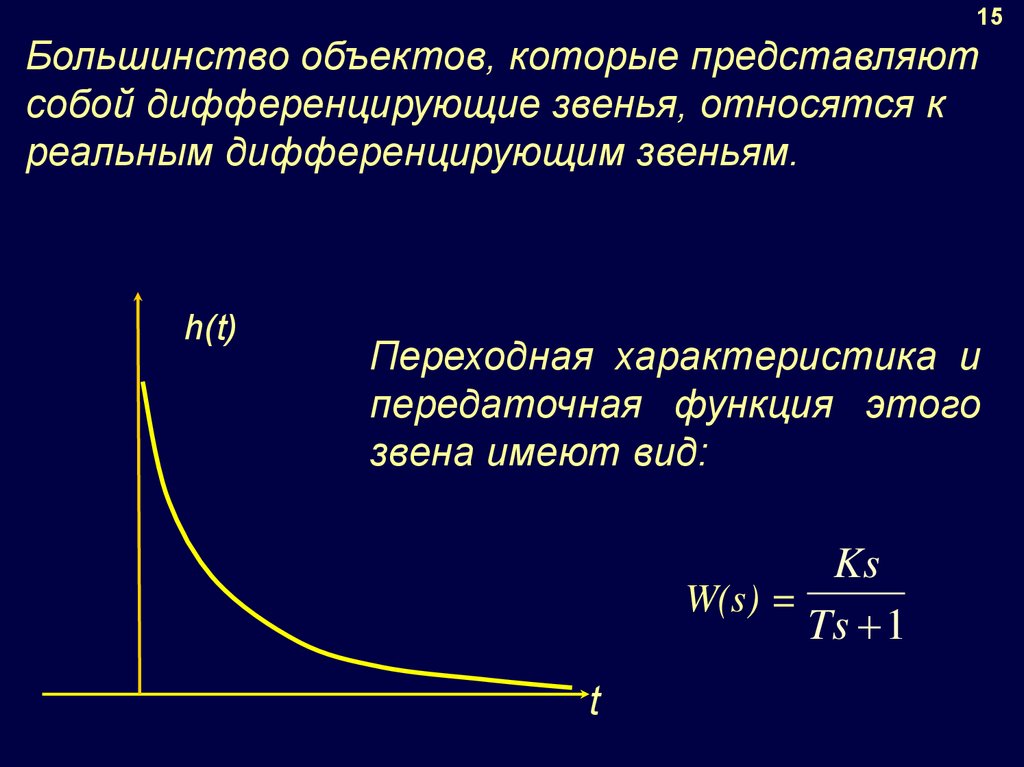
15Большинство объектов, которые представляют
собой дифференцирующие звенья, относятся к
реальным дифференцирующим звеньям.
h(t)
Переходная характеристика и
передаточная функция этого
звена имеют вид:
Ks
W(s) =
Ts 1
t
13.
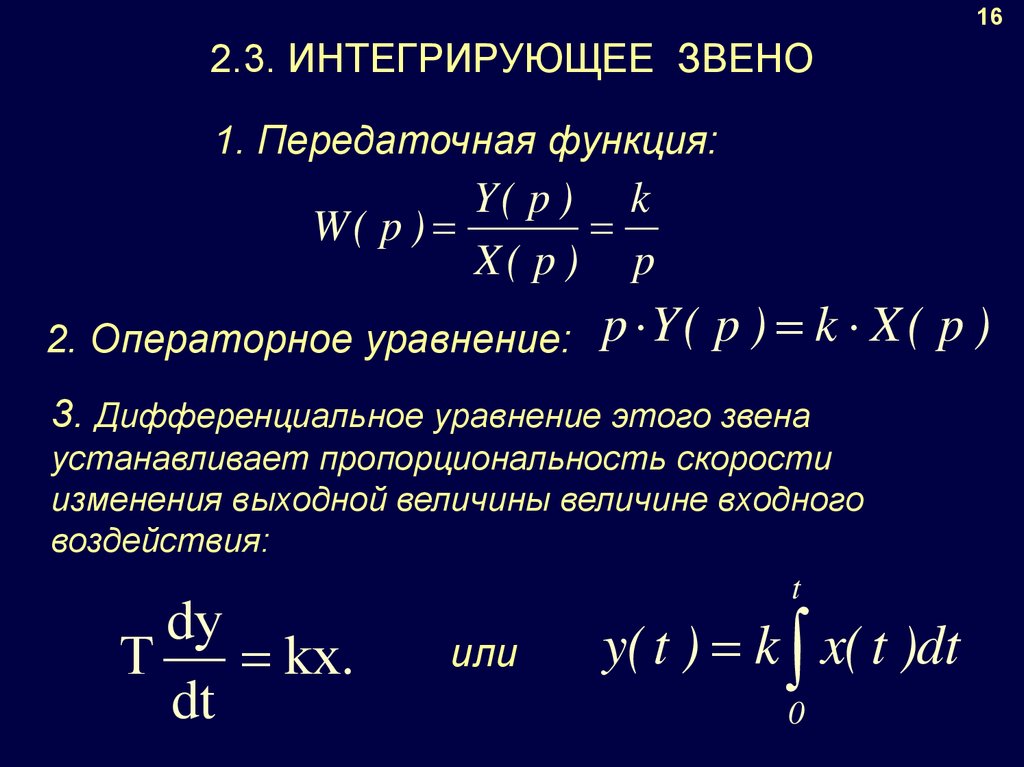
162.3. ИНТЕГРИРУЮЩЕЕ ЗВЕНО
1. Передаточная функция:
Y( p ) k
W( p )
X( p ) p
2. Операторное уравнение:
p Y ( p ) k X ( p )
3. Дифференциальное уравнение этого звена
устанавливает пропорциональность скорости
изменения выходной величины величине входного
воздействия:
t
dу
Т
kх.
dt
или
y( t ) k x( t )dt
0
14.
17Идеальное интегрирующее
Выходная величина идеального
интегрирующего звена пропорциональна
интегралу входной величины.
у
t
y( t ) k x( t )dt
0
t
k
W ( p)
p
При подаче на вход звена воздействия выходной
сигнал постоянно возрастает.
Это звено астатическое, т.е. не имеет
установившегося режима.
15.
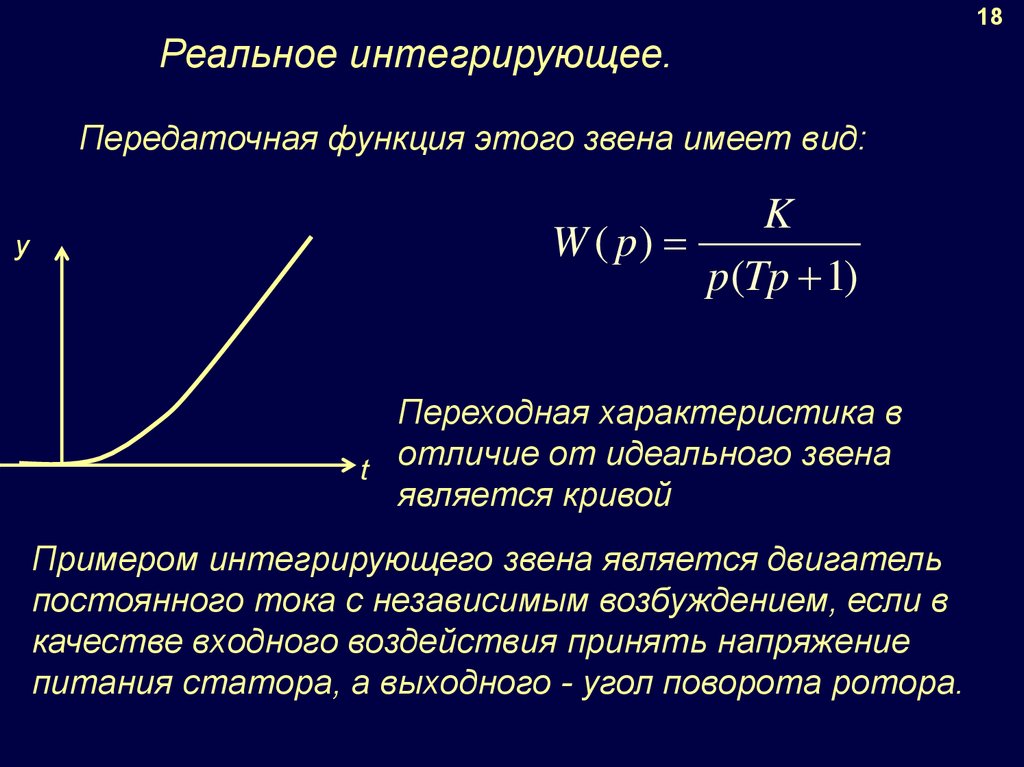
18Реальное интегрирующее.
Передаточная функция этого звена имеет вид:
у
K
W ( p)
p (Tp 1)
Переходная характеристика в
отличие от идеального звена
t
является кривой
Примером интегрирующего звена является двигатель
постоянного тока с независимым возбуждением, если в
качестве входного воздействия принять напряжение
питания статора, а выходного - угол поворота ротора.
16.
192.4. АПЕРИОДИЧЕСКОЕ ЗВЕНО
1. Передаточная функция:
Y( p )
k
W( p )
X ( p ) Tp 1
2. Операторное уравнение:
( Tp 1 )Y ( p ) kX ( p )
3. Дифференциальное уравнение:
T y( t ) y( t ) k x( t )
17.
20Свойства переходной функции:
h( t ) k ( 1 e
h( 0 ) k ( 1 1 ) 0
t
T
)
h( ) k ( 1 e ) k
0.95 h( )
h(t)
h( )=k
=0%
tp = ?
0
t, c
18.
Определение времени регулирования:0.95 h( )
h(t)
h( )=k
tp = ?
0
h( t P ) k ( 1 e
h( t P ) 0.95 k
t, c
tP
T
)
tP 3 T
21
19.
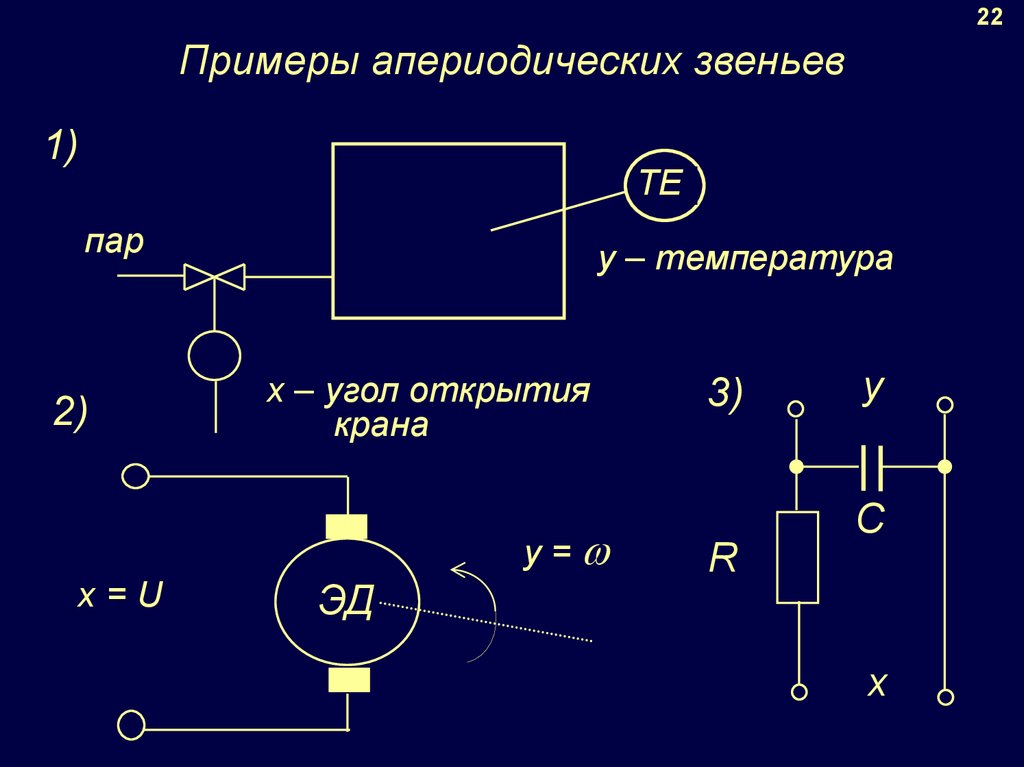
22Примеры апериодических звеньев
1)
TE
пар
2)
y – температура
x – угол открытия
крана
y=
x=U
ЭД
3)
y
C
R
x
20.
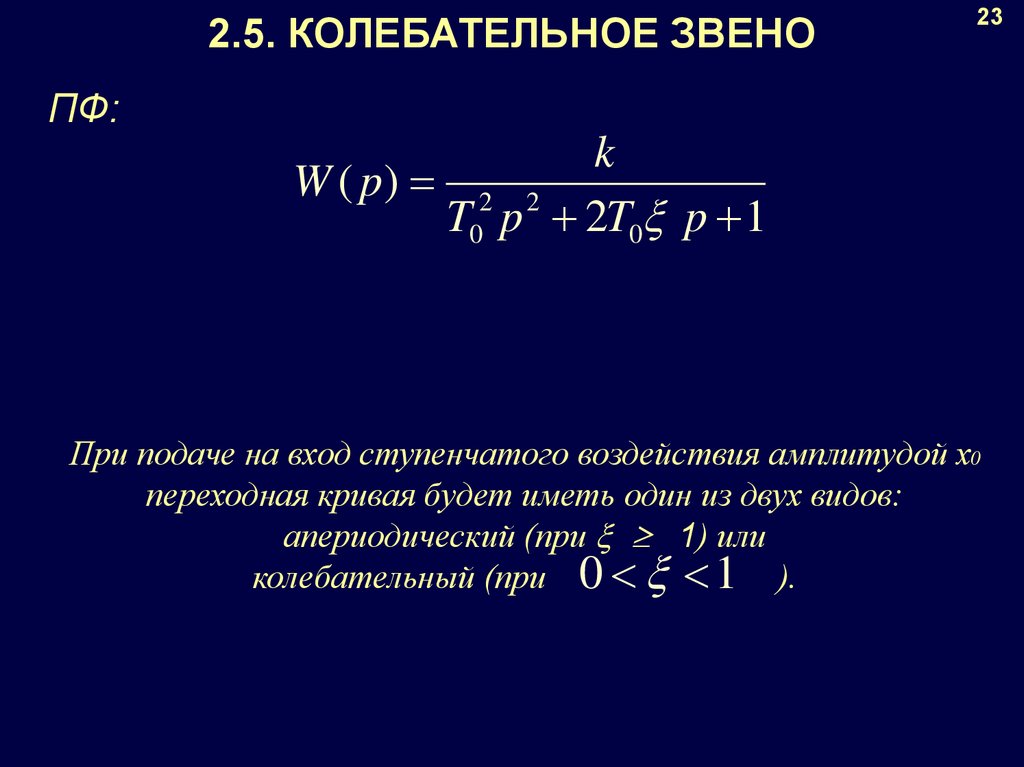
2.5. КОЛЕБАТЕЛЬНОЕ ЗВЕНО23
ПФ:
k
W ( p) 2 2
T0 p 2T0 p 1
При подаче на вход ступенчатого воздействия амплитудой х0
переходная кривая будет иметь один из двух видов:
апериодический (при 1) или
колебательный (при 0 1 ).
21.
24k = h( )
h(t)
0
t, c
1 - апериодическое звено 2-го порядка
22.
25h(t)
hmax1
k = h( )
tр
T
0
tmax1
hmax 1 h( )
h( )
T0 1 / 2 2
t, c
ln
t max 1
2
T
T0
23.
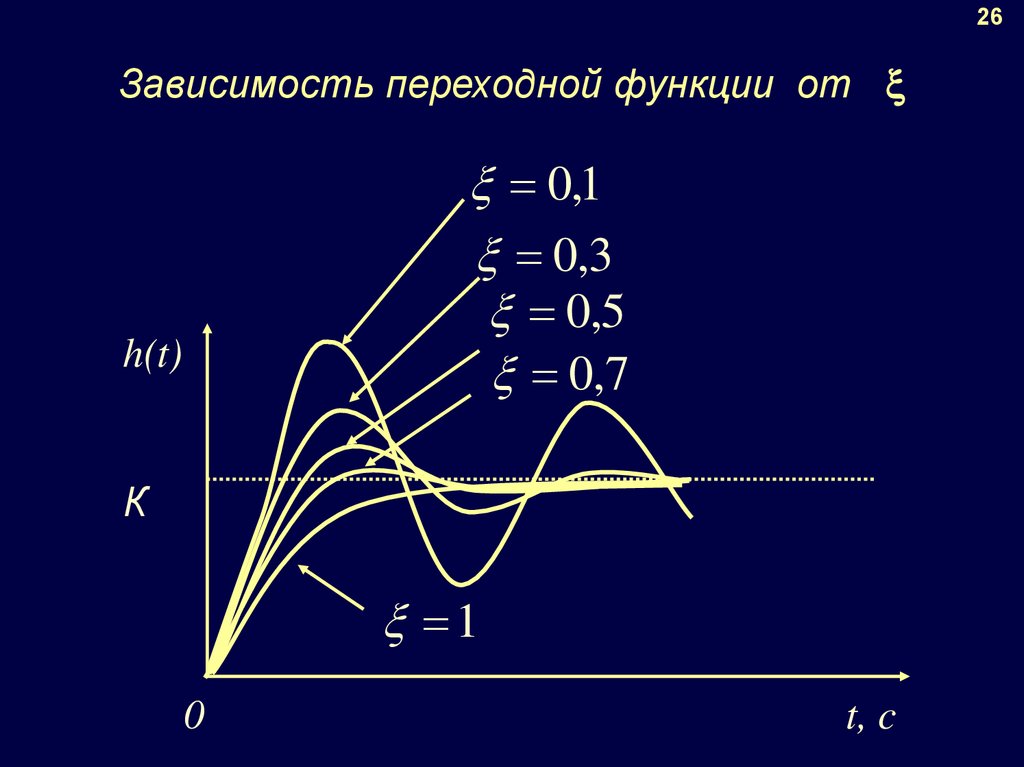
26Зависимость переходной функции от
0,1
0,3
0,5
0,7
h(t)
К
1
0
t, c
24.
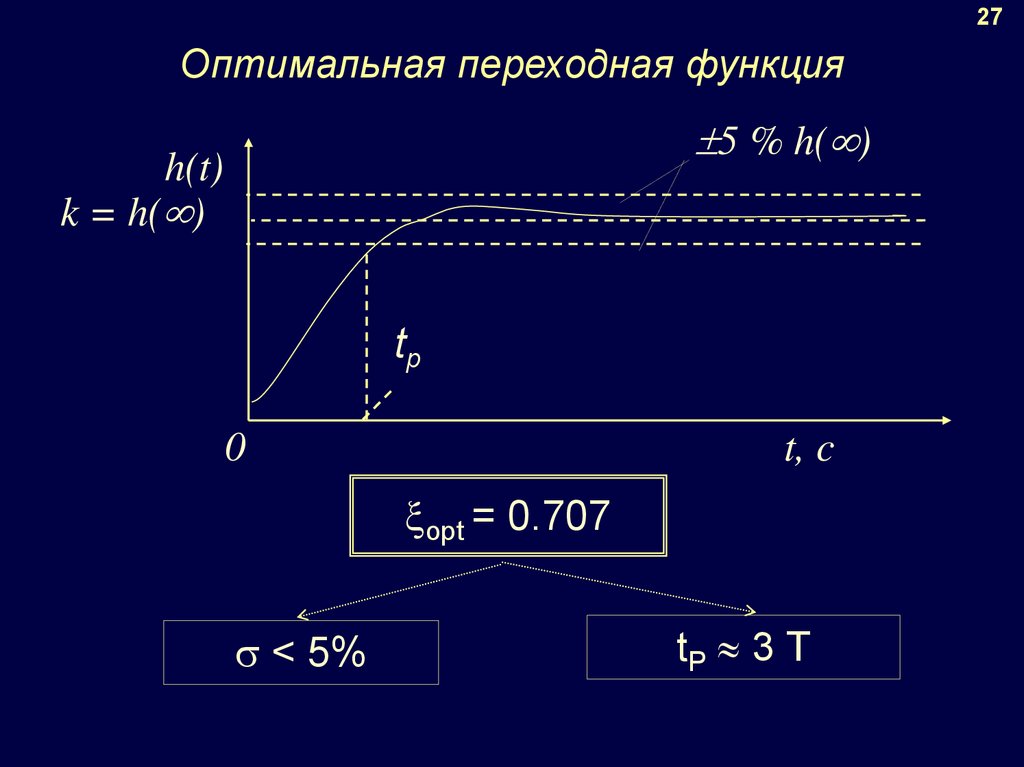
27Оптимальная переходная функция
5 % h( )
h(t)
k = h( )
tр
0
t, c
opt = 0.707
< 5%
tР 3 T
25.
28Инерции
Колебания –
результат
взаимодействия сил
Демпфирования
Жесткости
ПРИМЕРЫ КОЛЕБАТЕЛЬНЫХ ЗВЕНЬЕВ:
- автомобиль на пружинном подвесе
с амортизаторами,
- механические весы,
- электрические цепи,
включающие активное сопротивление, емкость и
индуктивность.
26.
292.6. ЗАПАЗДЫВАНИЕ В САУ
x1 ( t )
транспортеры
x2 ( t )
трубопроводы
в гидросистемах
x3 ( t )
электрические
длинные линии
k1 x1 ( t 1 )
k 2 x2 ( t 2 )
k3 x3 ( t 3 )
Звеном с запаздыванием называется
элемент САУ, оператор которой имеет вид:
y( t ) k x( t ),
y(t) 0 t .
27.
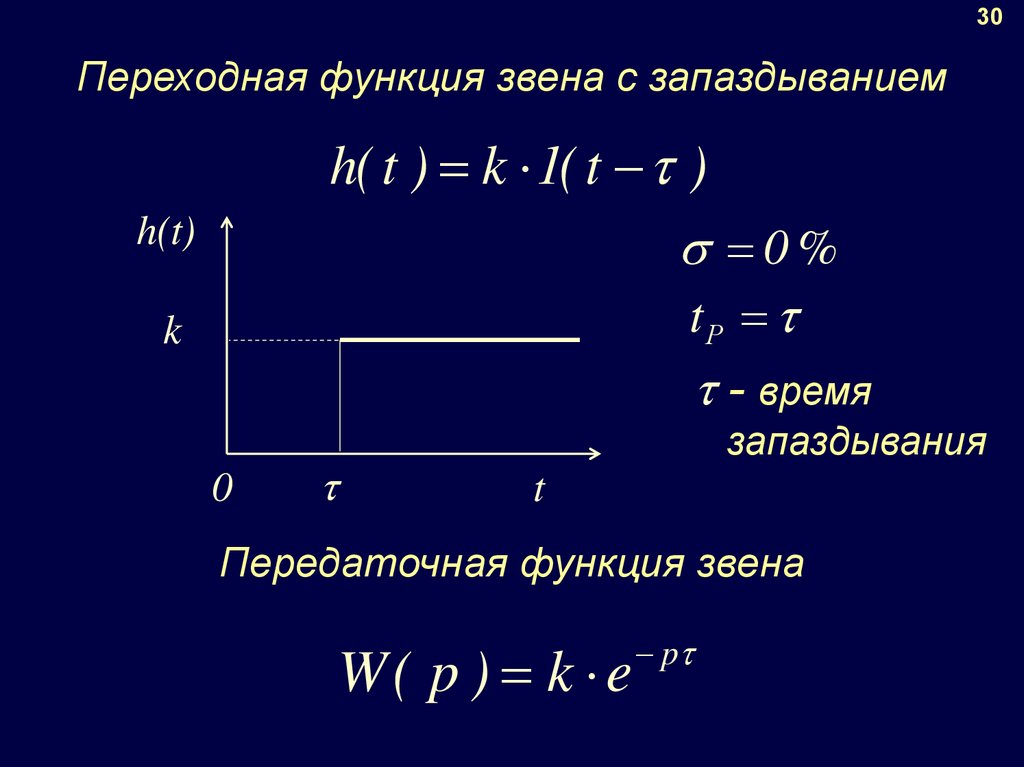
30Переходная функция звена с запаздыванием
h( t ) k 1( t )
0%
tР
- время
h(t)
k
0
запаздывания
t
Передаточная функция звена
W( p ) k e
p
28.
Простейшие типовые звенья:• усилительное,
• интегрирующее,
• дифференцирующее,
• апериодическое,
• колебательное,
• запаздывающее
29.
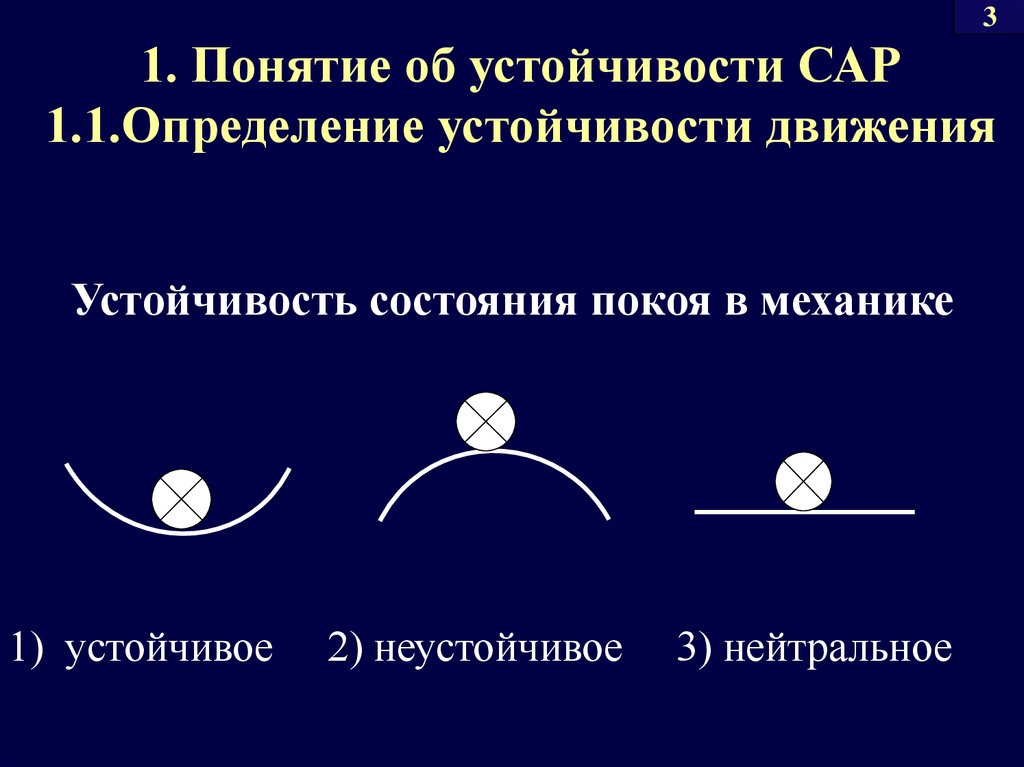
31. Понятие об устойчивости САР
1.1.Определение устойчивости движения
Устойчивость состояния покоя в механике
1) устойчивое
2) неустойчивое
3) нейтральное
30.
4Выдающийся русский ученый А.М.Ляпунов
- основоположник учения об устойчивости
движения, в качестве аналога состоянию
покоя выбрал невозмущенное движение
Невозмущенным называется движение
САР при отсутствии возмущений.
САР называется устойчивой, если она, будучи
выведенной из состояния невозмущенного
движения некоторым возмущением, приходит
вновь в это состояние или близкое к нему
после прекращения действия этого
возмущения.
31.
5В САУ, работающей по отклонению,
регулятор изменяет управляющий сигнал
после того, как регулируемый параметр
отклонился
от
заданного
значения.
Следовательно, он должен не только
компенсировать возмущающее воздействие,
но и свести к нулю отклонение регулируемого
параметра от заданного значения. При этом
могут быть следующие случаи.
32.
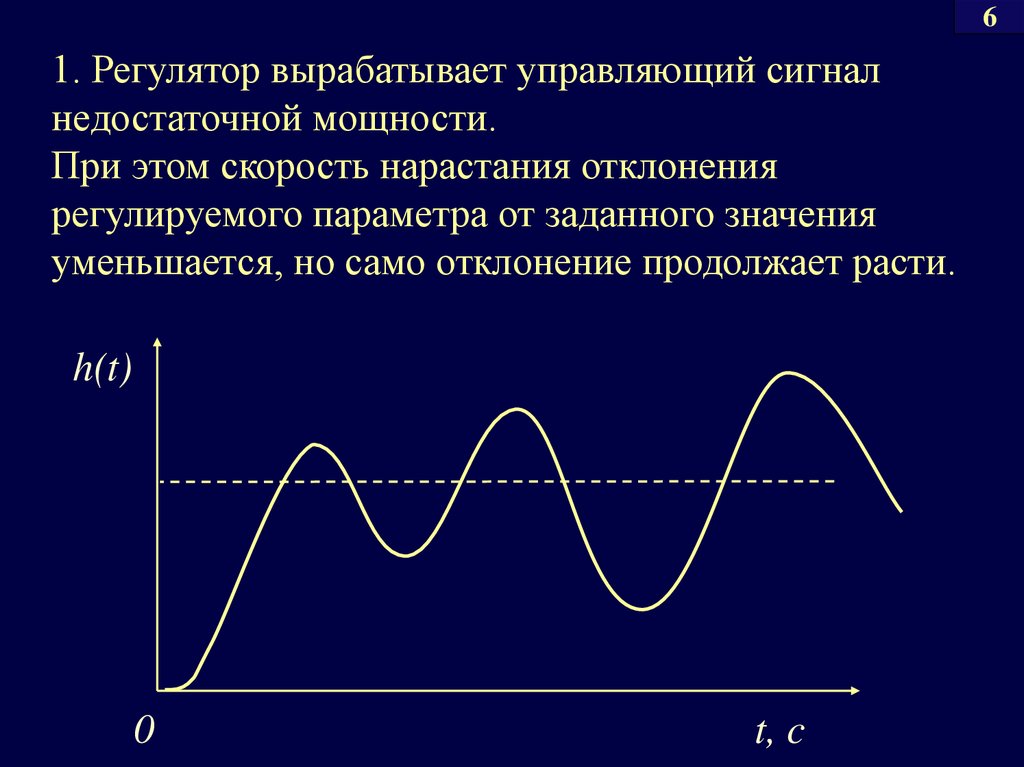
61. Регулятор вырабатывает управляющий сигнал
недостаточной мощности.
При этом скорость нарастания отклонения
регулируемого параметра от заданного значения
уменьшается, но само отклонение продолжает расти.
h(t)
0
t, c
33.
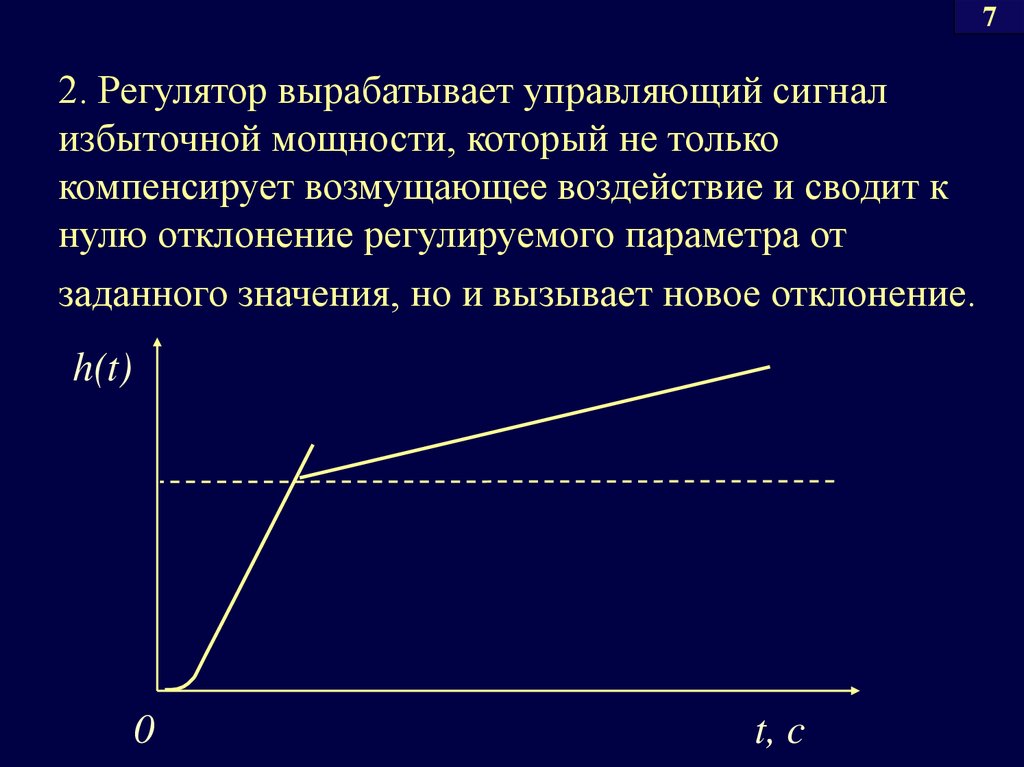
72. Регулятор вырабатывает управляющий сигнал
избыточной мощности, который не только
компенсирует возмущающее воздействие и сводит к
нулю отклонение регулируемого параметра от
заданного значения, но и вызывает новое отклонение.
h(t)
0
t, c
34.
83. Регулятор вырабатывает управляющий сигнал необходимой
мощности. При этом регулируемый параметр либо плавно
возвращается к заданному значению (апериодический процесс
регулирования), либо возвращается к нему через колебания
уменьшающейся амплитуды (колебательный процесс
регулирования).
h(t)
0
t, c
35.
94.Понятие устойчивости. Критерии
устойчивости.
САР называется асимптотически
устойчивой, если при указанных выше
условиях она приходит строго в исходное
состояние.
Далее устойчивая САР –
это асимптотически устойчивая САР
Причина движения САР после
прекращения действия возмущения
– ненулевые начальные условия
36.
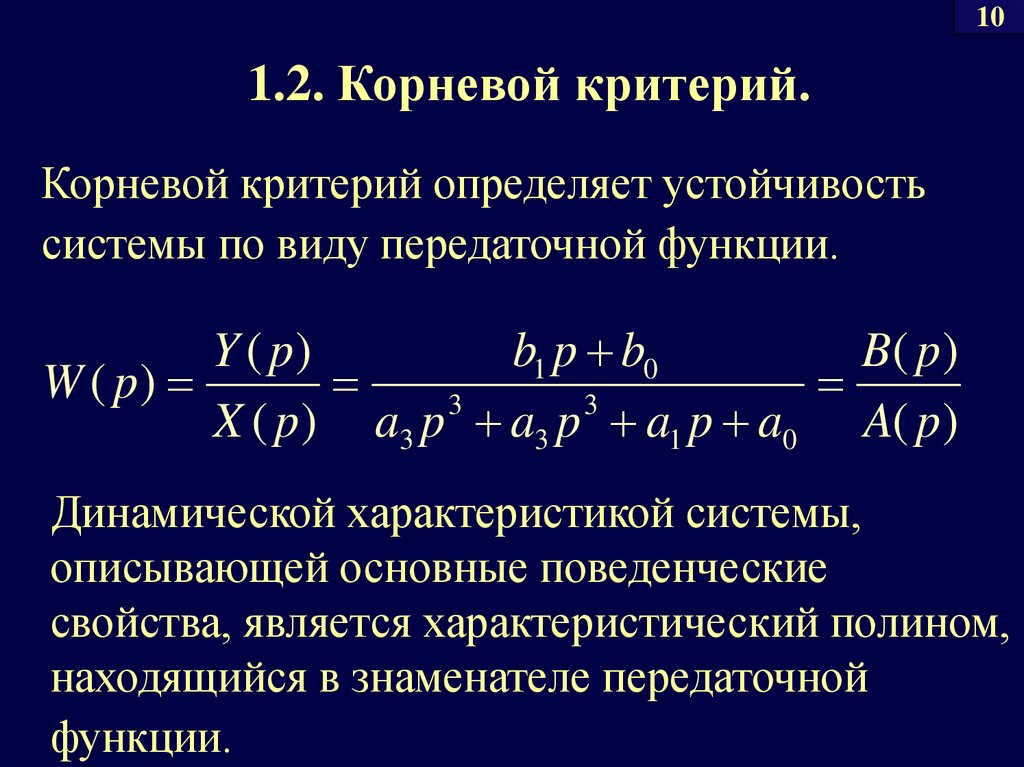
101.2. Корневой критерий.
Корневой критерий определяет устойчивость
системы по виду передаточной функции.
b1 p b0
Y ( p)
B( p)
W ( p)
3
3
X ( p ) a3 p a3 p a1 p a0 A( p )
Динамической характеристикой системы,
описывающей основные поведенческие
свойства, является характеристический полином,
находящийся в знаменателе передаточной
функции.
37.
11A( p ) a3 p a3 p a1 p a0 0
3
3
Путем приравнивания знаменателя к нулю
можно получить характеристическое уравнение,
по корням которого определить устойчивость.
Корни характеристического уравнения могут
быть как действительные, так и комплексные и
для определения устойчивости откладываются на
комплексной плоскости
38.
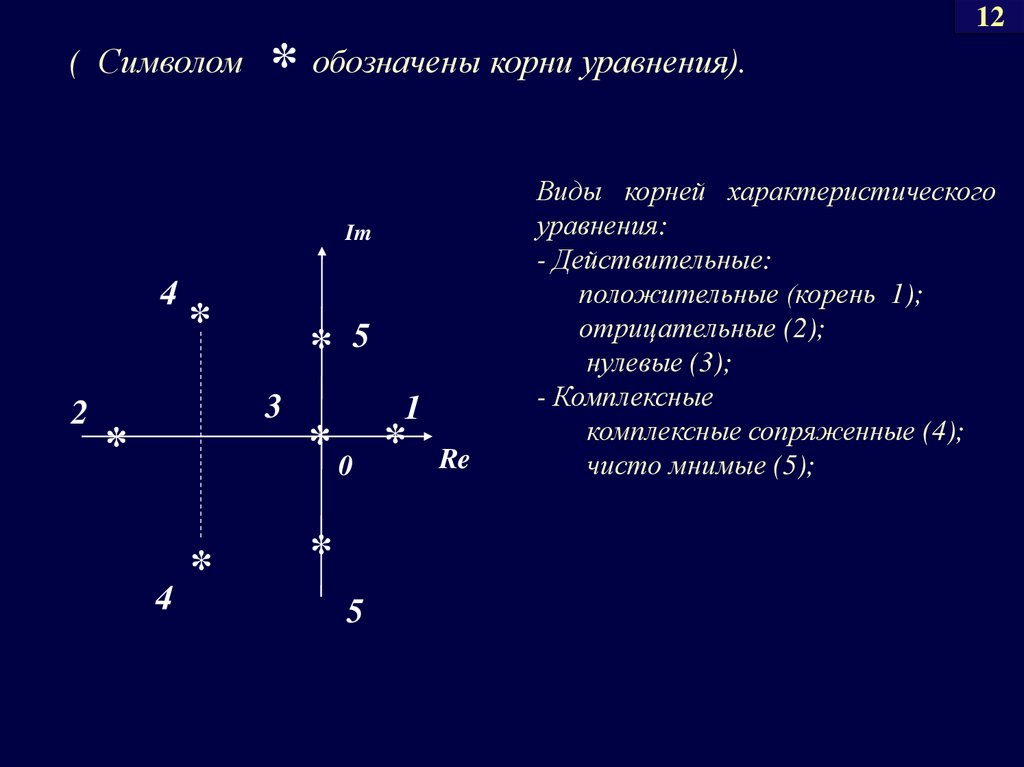
12( Символом
* обозначены корни уравнения).
Im
4
2
*
*
3
*
4
*
5
1
*0 *
*
5
Re
Виды корней характеристического
уравнения:
- Действительные:
положительные (корень 1);
отрицательные (2);
нулевые (3);
- Комплексные
комплексные сопряженные (4);
чисто мнимые (5);
39.
131.3. Необходимые и достаточные условия
устойчивости САР
Для того, чтобы линейная стационарная
САР была асимптотически устойчивой по
Ляпунову необходимо и достаточно,
чтобы корни ее характеристического
уравнения имели отрицательные
действительные части
(находились слева от мнимой оси на
комплексной плоскости ).
40.
141.3. Необходимые и достаточные условия
устойчивости САР
Если часть корней характеристического
уравнения САР находятся на мнимой оси, а
все остальные корни расположены в левой
полуплоскости, то говорят, что САР
находится на границе устойчивости.
41.
устойчивая15
h(t)
Im
*
*
Re
0
*
t
0
неустойчивая
Im
h(t)
*
*
Re
0
*
0
t
42.
16h(t)
Im
*
*
нейтральная
0
Re
*
t
0
A(p) = anpn + an-1pn-1 + ...+ a1p + a0 = 0.
Анализ устойчивости
Определение
корней
Использование
критериев
43.
172. Алгебраические критерии устойчивости
непрерывных САР
2.1. Необходимые условия устойчивости
Пусть A(p) = an pn+an-1pn-1 + ... + a1p+a0,
an > 0,
A(p) = an (p – p1 )(p – p2 )...(p – pn ),
где рi корни уравнения A(p) = 0.
44.
18A(p) = an (p – p1 )(p – p2 )...(p – pn ),
Если
p1 = - < 0 устойчивый корень,
(p – p1) = (p + ) - двучлен
с положительными коэффициентами,
Если
p1 = - + j ; p2 = - - j ;
> 0; > 0 - устойчивые корни,
(р – р1 )(р – р2 ) = (p + - j )(p + + j ) =
= p2 + 2 p + 2+ 2,
2 > 0, 2 + 2 >0
45.
19Необходимые условия устойчивости :
Если линейная стационарная
САР устойчива, то все коэффициенты
её характеристического полинома
больше нуля.
Это значит, что если
1) хотя бы один из коэффициентов
ai 0, i 1, n - САР неустойчива;
2) все коэффициенты ai > 0, i 1, n
- САР необходимо доп. исследовать;
46.
20Примеры:
1)
A(p) = p3- 3 p2+ 2p+1 САР неустойчива - a2 < 0.
2)
A(p) = p3 + 4 p + 4
-
САР неустойчива - a2 = 0.
3) A(p) = p3 + p2 + 4 p + 20; все ai > 0
САР необходимо доп. исследовать
-
47.
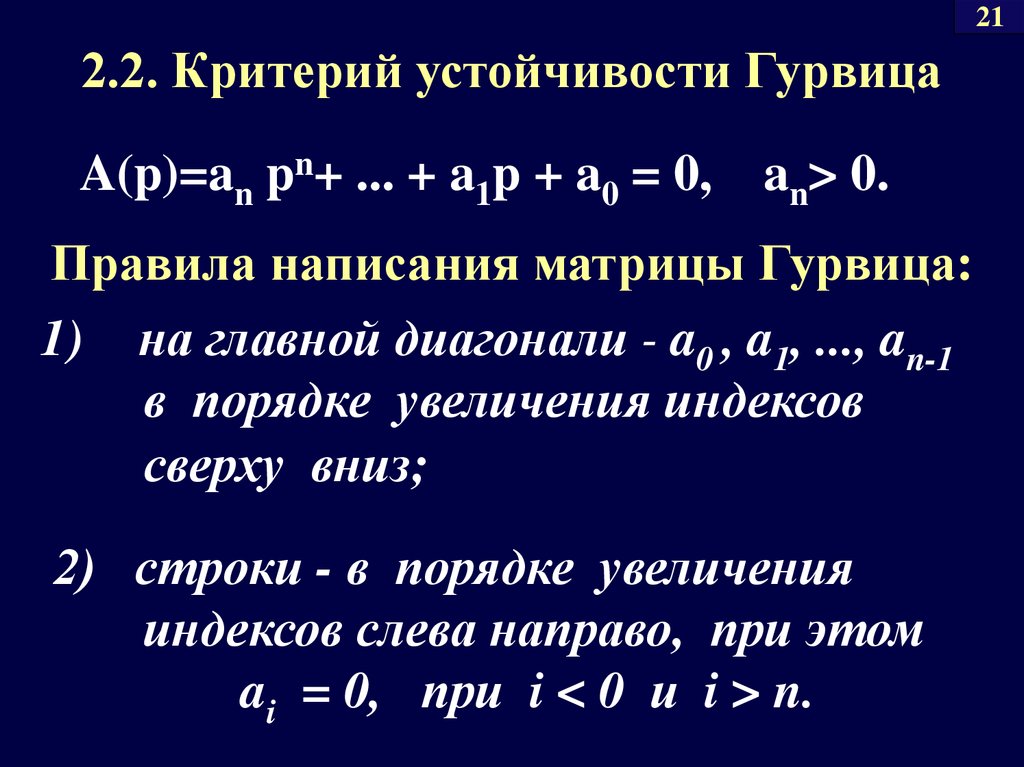
212.2. Критерий устойчивости Гурвица
A(p)=an pn+ ... + a1p + a0 = 0,
an> 0.
Правила написания матрицы Гурвица:
1) на главной диагонали - a0 , a1, ..., an-1
в порядке увеличения индексов
сверху вниз;
2) строки - в порядке увеличения
индексов слева направо, при этом
ai = 0, при i < 0 и i > n.
48.
22a1
Н=
R1 an ;
a0
0
0
…
0
a3
a2
a1
a0
…
0
a5 …
0
0
a4 …
a3 …
a2 …
0
…
0
0
0
0
… … an-1 an-3
0 … an-2 an
an 1
R2
an 2
an 3
;
an
... Rn R .
49.
23Критерий Гурвица:
Для того, чтобы корни
характеристического уравнения
САР при аn > 0 имели
отрицательные действительные
части, необходимо и достаточно,
чтобы определители всех диагональных
подматриц матрицы Гурвица были
положительными:
R 1 0;
R 2 0;
...
R n 0.
50.
24Критерий Гурвица САР 2-го порядка.
A(p) = a2 p2 + a1 p + a0,
a 0 0
R
;
a 2 a1
a0 0
R2
0;
a 2 a1
a2 > 0;
R1 a1 0;
a1 0;
a1 a 0 0;
a 0 0;
51.
25Для САР 2-го порядка необходимые
условия являются и достаточными
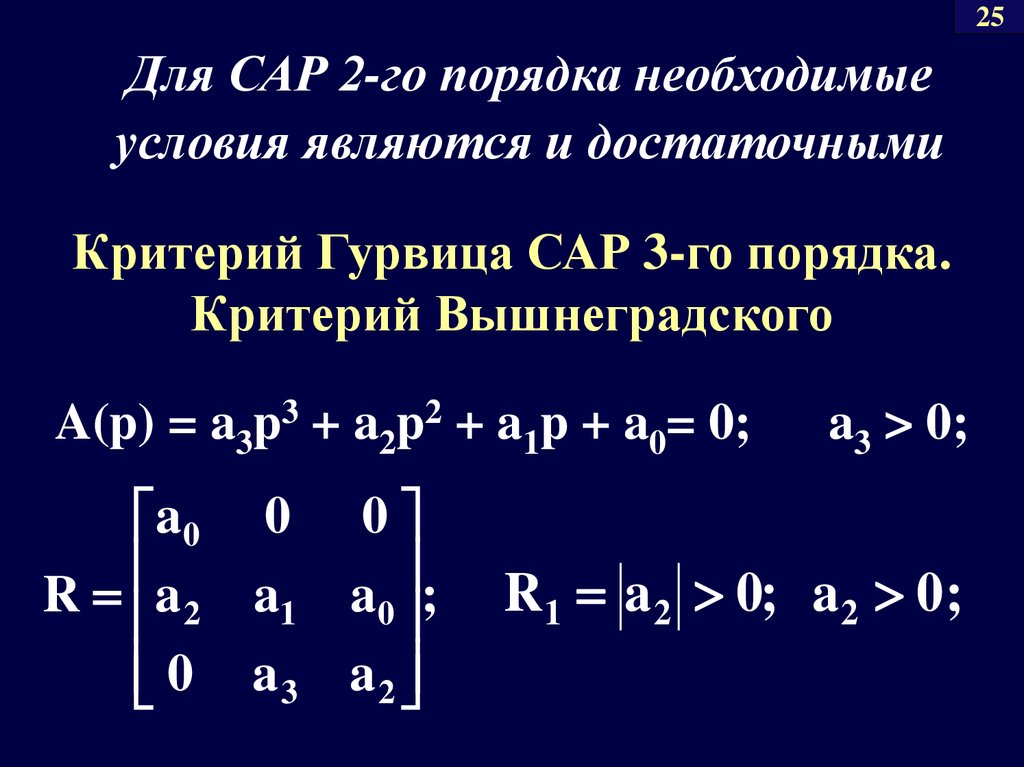
Критерий Гурвица САР 3-го порядка.
Критерий Вышнеградского
A(p) = a3p3 + a2p2 + a1p + a0= 0;
a 0 0 0
R a 2 a1 a 0 ;
0 a 3 a 2
a3 > 0;
R1 a 2 0; a 2 0;
52.
26a 0 0 0
R a 2 a1 a0 ;
0 a 3 a 2
a1 a 0
R2
0;
a3 a2
a1 a 2 a 0 a 3 0
a1 a 2 a 0 a 3
Критерий
Вышнеградского
a 3 0,
a 2 0,
a1 0,
a 0 0.
53. Для того, чтобы САР 3-го порядка была устойчивой, необходимо и достаточно, чтобы все коэффициенты ее характеристического
27Критерий Вышнеградского
Для того, чтобы САР 3-го
порядка была устойчивой,
необходимо и достаточно, чтобы
все коэффициенты ее
характеристического полинома
были положительны и
произведение средних членов
было больше произведения
крайних.
54.
283. Области устойчивости САР
Как влияют на устойчивость САР
ее параметры?
Пространство параметров, внутри
которого САР устойчива, называется ее
областью устойчивости.
Области устойчивости очерчиваются
линиями (границами), которые определяются по критериям устойчивости.
55.
29.
Границы области устойчивости имеют
штриховку, направленную в сторону
области устойчивости.
Пример.
Дано: структурная схема САР
Требуется определить:
область устойчивости замкнутой
САР в плоскости параметров
корректирующего устройства k и .
56.
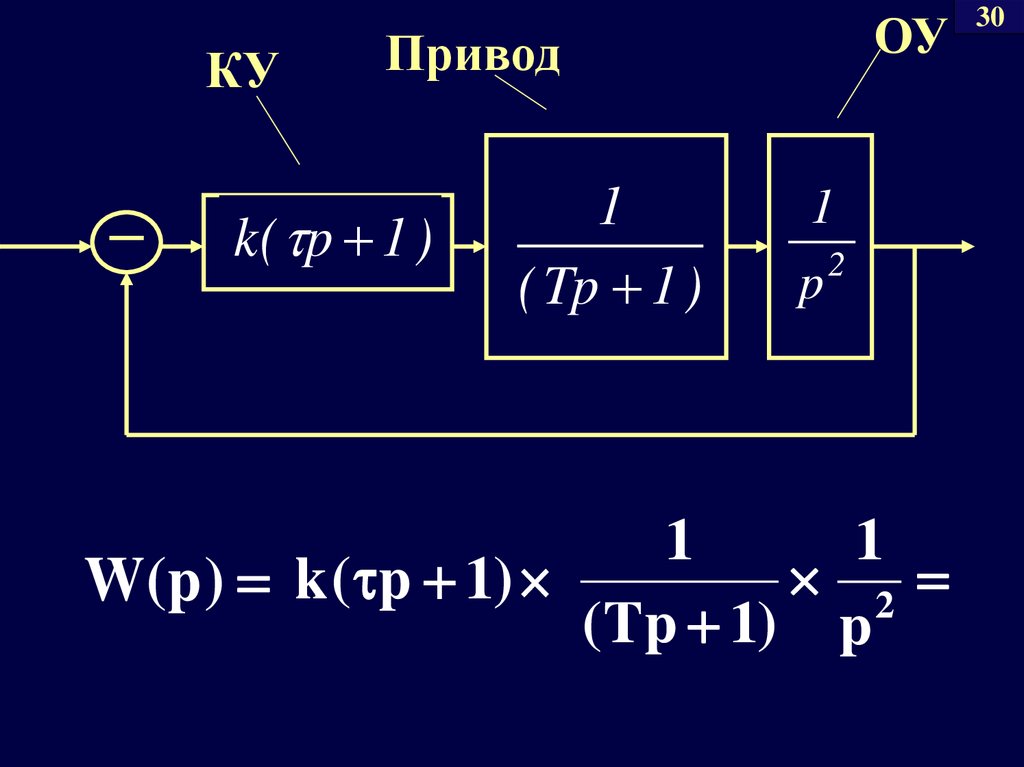
КУОУ
Привод
k ( p 1 )
1
( Tp 1 )
1
p
2
1
1
2
W(p ) k ( p 1)
(Tp 1) p
30
57.
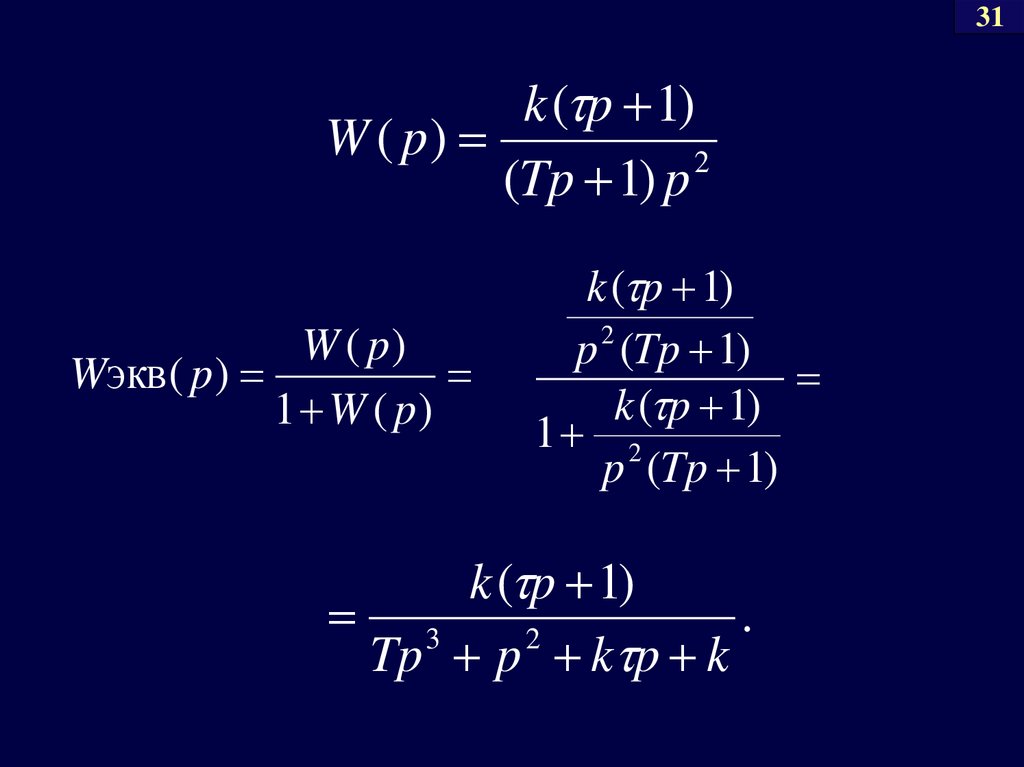
31k ( p 1)
W ( p)
2
(Tp 1) p
W ( p)
Wэкв ( p )
1 W ( p)
k ( p 1)
p 2 (Tp 1)
k ( p 1)
1 2
p (Tp 1)
k ( p 1)
3
.
2
Tp p k p k
58.
32k ( p 1)
Wэкв ( p ) 3
2
Tp p k p k
A( p ) Tp p k p k
3
2
Из необходимых условий
k > 0, > 0,
По критерию Вышнеградского:
k >kT
>T
59.
33k > 0, > 0,
Итак:
>T
k
Область
устойчивости
0
T