







 physics
physicsSimilar presentations:







")


Теория автоматического управления
1. ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Лектор – Розкаряка Павел Иванович, доц. каф. ЭАПУВ результате изучения дисциплины студенты должны:
знать основы теории построения замкнутых систем автоматического
управления, основные методы анализа и синтеза систем управления;
уметь применять теоретические знания для анализа и синтеза систем
управления электромеханическими объектами.
Высшая
математика
Информатика
Теоретические
основы
электротехники
Электрические
машины
Теория автоматического управления
Специальные дисциплины
1
2.
Литература1. Бесекерский В.А., Попов Е.П. Теория систем автоматического
регулирования. Изд. 3-е, испр. – М.: Изд-во «Наука». Главная редакция физ.мат. литературы, 1975. – 768 с. (переизд. 2003, 2004)
2. Техническая кибернетика. Теория автоматического регулирования. Книга 1.
Математическое описание, анализ устойчивости и качества систем
автоматического регулирования. Под ред. д.т.н., проф. Солодовникова В.В. –
М.; Изд-во «Машиностроение», 1967. – 770 с.
3. Синтез вентильних приводів постійного струму: Навч. посібник / Коцегуб П.Х.
– К.: ІЗМН, 1997. – 122 с.
4. Дорф Р., Бишоп Р. Современные системы управления. – Москва.: ЛБЗ, 2002.
– 832 с.
5. Ким Д.П. Теория автоматического управления. Т.1. Линейные системы. – М.:
Физматлит, 2003. – 288 с.
6. Филлипс Ч., Харбор Р. Системы управления с обратной связью. – М.: ЛБЗ,
2001. – 616 с., ил.
2
3.
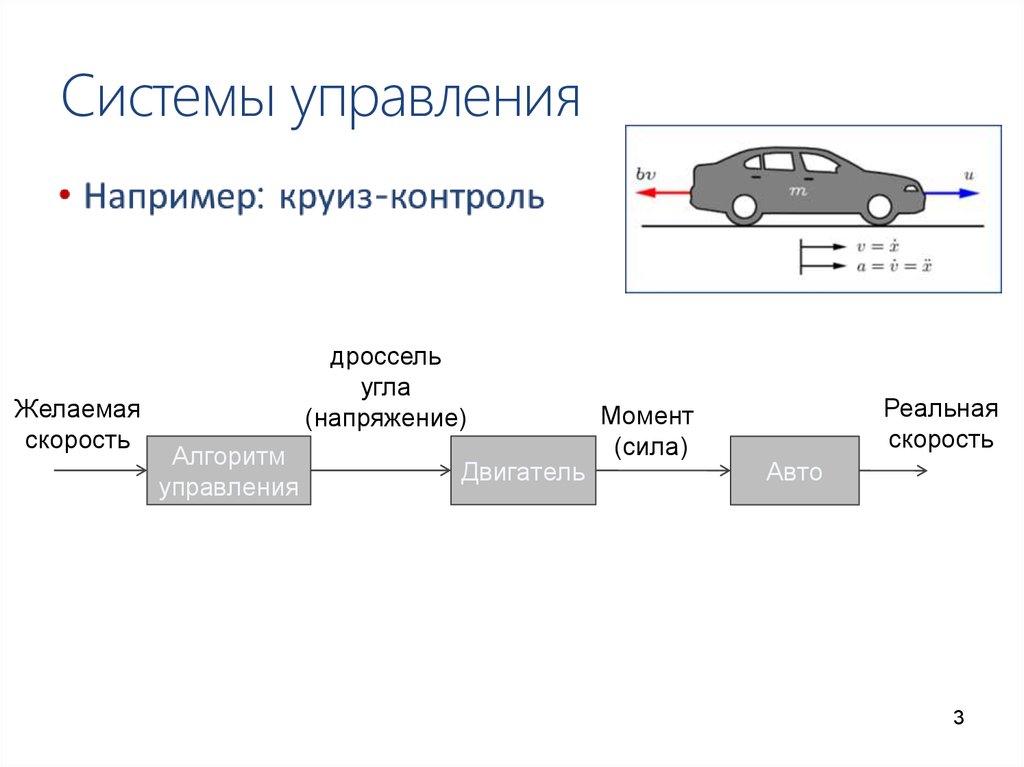
Системы управленияЖелаемая
скорость
дроссель
угла
(напряжение)
Алгоритм
управления
Двигатель
Момент
(сила)
Реальная
скорость
Авто
3
4.
Разомкнутая система (Open-loop Control)Желаемая
скорость
дроссель
угла
(напряжение)
Алгоритм
управления
Двигатель
Недостатки
• Чувствительна к изменению параметров
• Чувствительна к возмущениям
• Нуждается в периодической настройке
Ветер,
сила притяжения
Реальная
скорость
Момент
+
Авто
Достоинства
• Проста в разработке
• не дорогая
• не влияет на устойчивость
• быстрая отработка задания
4
5.
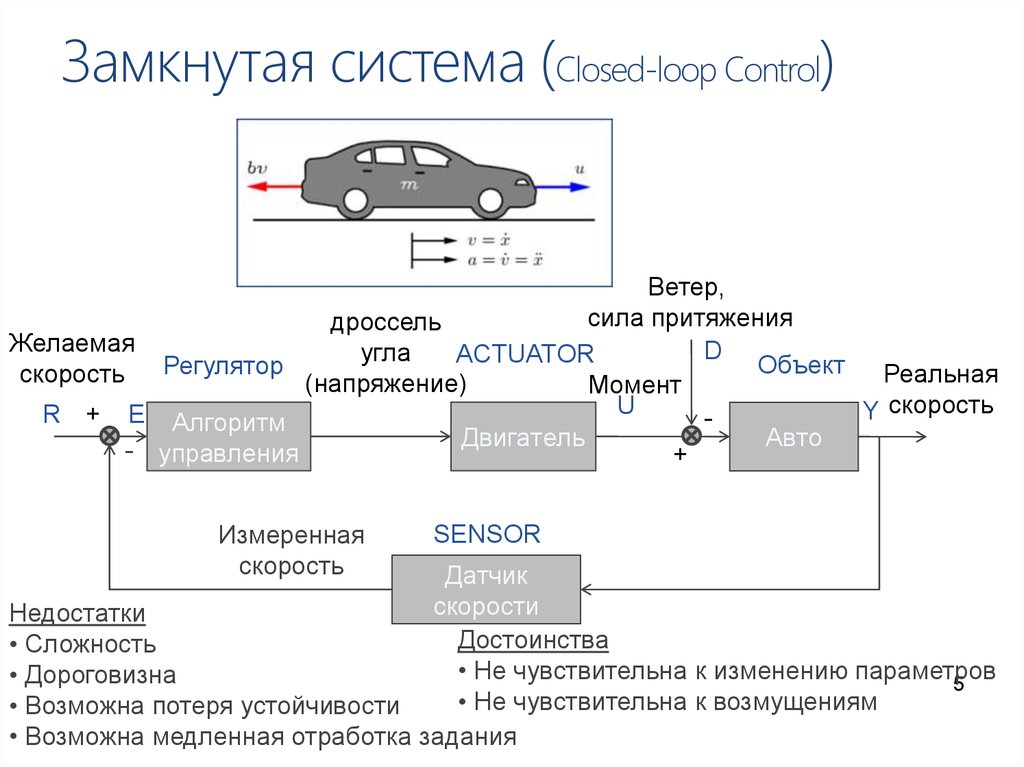
Замкнутая система (Closed-loop Control)Ветер,
сила притяжения
дроссель
Желаемая
D
угла
ACTUATOR
Объект Реальная
Регулятор
скорость
(напряжение)
Момент
U
Y скорость
R + E Алгоритм
Двигатель
Авто
- управления
+
Измеренная
скорость
SENSOR
Датчик
скорости
Недостатки
Достоинства
• Сложность
• Не чувствительна к изменению параметров
• Дороговизна
5
Не
чувствительна
к
возмущениям
• Возможна потеря устойчивости
• Возможна медленная отработка задания
6.
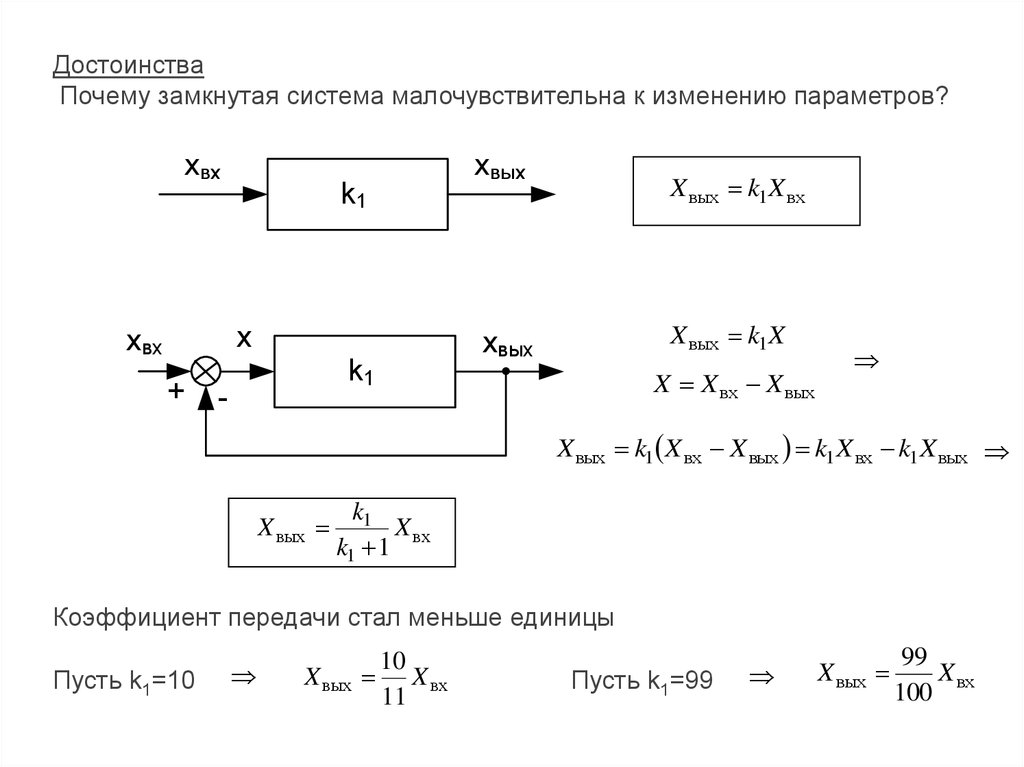
ДостоинстваПочему замкнутая система малочувствительна к изменению параметров?
xвх
k1
x
xвх
+
k1
-
xвых
X вых k1 X вх
X вых k1 X
xвых
X X вх X вых
X вых k1 X вх X вых k1 X вх k1 X вых
X вых
k1
X вх
k1 1
Коэффициент передачи стал меньше единицы
Пусть k1=10
X вых
10
X вх
11
Пусть k1=99
X вых
99
X вх
100
7.
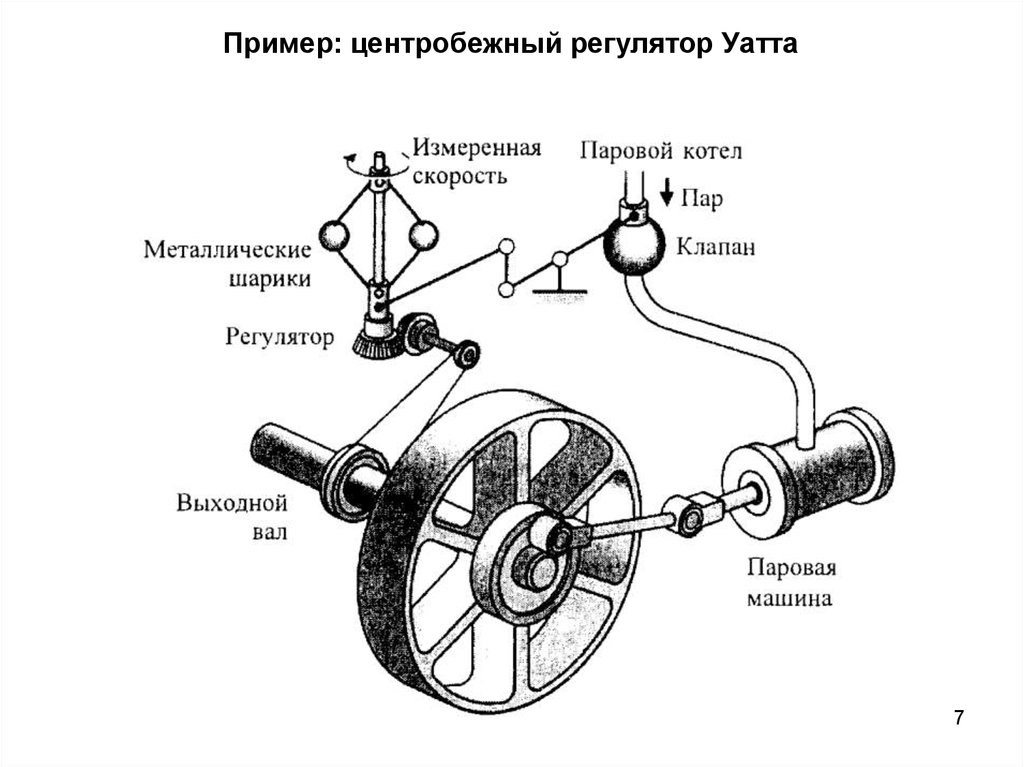
Пример: центробежный регулятор Уатта7
8.
Понятие системы управления.Сущность автоматического управления
Система - совокупность элементов любой физической природы
и процессы, наблюдаемые в них, обладающая свойством
целеустремленности.
Наличие цели управления (целеустремленности) является фундаментальным
признаком системы.
Любой процесс управления подразумевает наличие объекта управления
(управляемой подсистемы) и управляющей подсистемы.
Система управления образуется управляемой и
управляющей подсистемами, находящимися во
взаимодействии друг с другом.
Поведение всякой системы управления определяется целью управления,
внешними условиями (окружающей обстановкой) и внутренними условиями
(свойствами управляемой системы и объекта управления).
8
9.
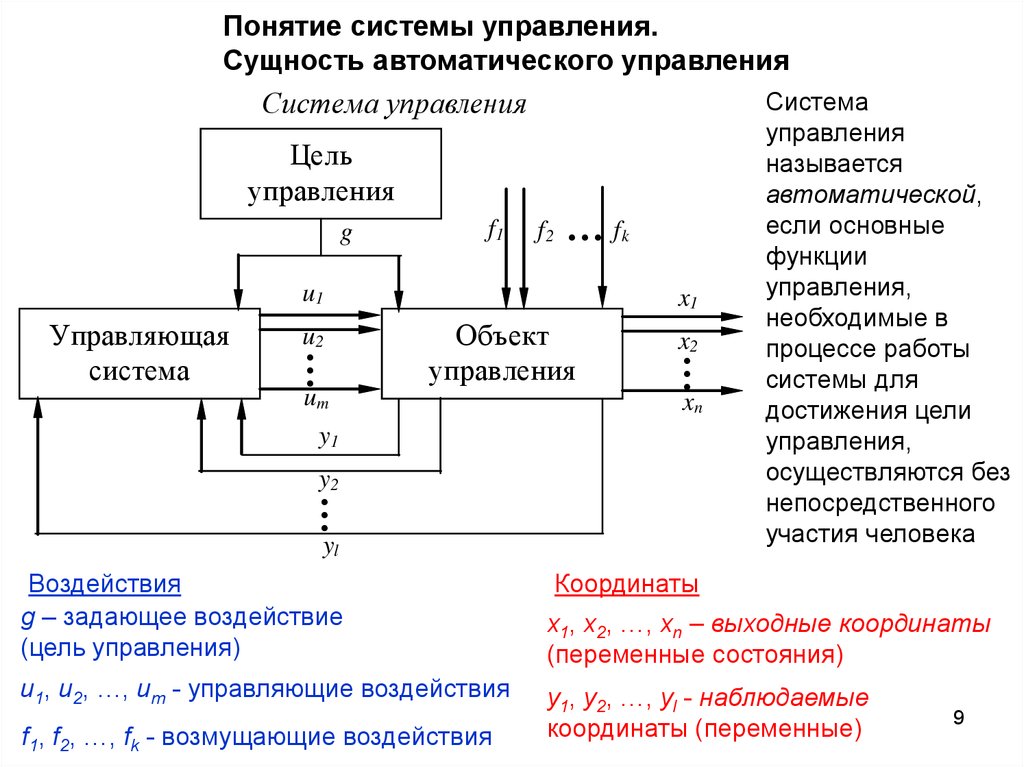
Понятие системы управления.Сущность автоматического управления
Система управления
Цель
управления
g
f1
f2
… fk
u1
u2
Объект
управления
um
x2
…
…
Управляющая
система
x1
xn
y1
y2
…
yl
Воздействия
g – задающее воздействие
(цель управления)
u1, u2, …, um - управляющие воздействия
f1, f2, …, fk - возмущающие воздействия
Система
управления
называется
автоматической,
если основные
функции
управления,
необходимые в
процессе работы
системы для
достижения цели
управления,
осуществляются без
непосредственного
участия человека
Координаты
x1, x2, …, xn – выходные координаты
(переменные состояния)
y1, y2, …, yl - наблюдаемые
координаты (переменные)
9
10.
Понятие системы управления.Сущность автоматического управления
Объект управления (ОУ) – управляемая подсистема, на
которую действуют управляющие и возмущающие воздействия,
полностью определяющие ее текущее состояние (значения
переменных состояния x1, x2, …, xn).
В роли объекта управления может выступать любой предмет, устройство,
объект, процесс.
В зависимости от реакции на входные воздействия ОУ подразделяют на
устойчивые
Начальные условия
нейтральные
t t0
u u0
f f0
неустойчивые
x x0
На время Т происходит изменение одного из воздействий
с последующим возвратом к начальным условиям
Результирующее состояние
lim x t x0
t
lim x t x0* x0
t
u u0 u
или
f f 0 f
lim x t
t
10
11.
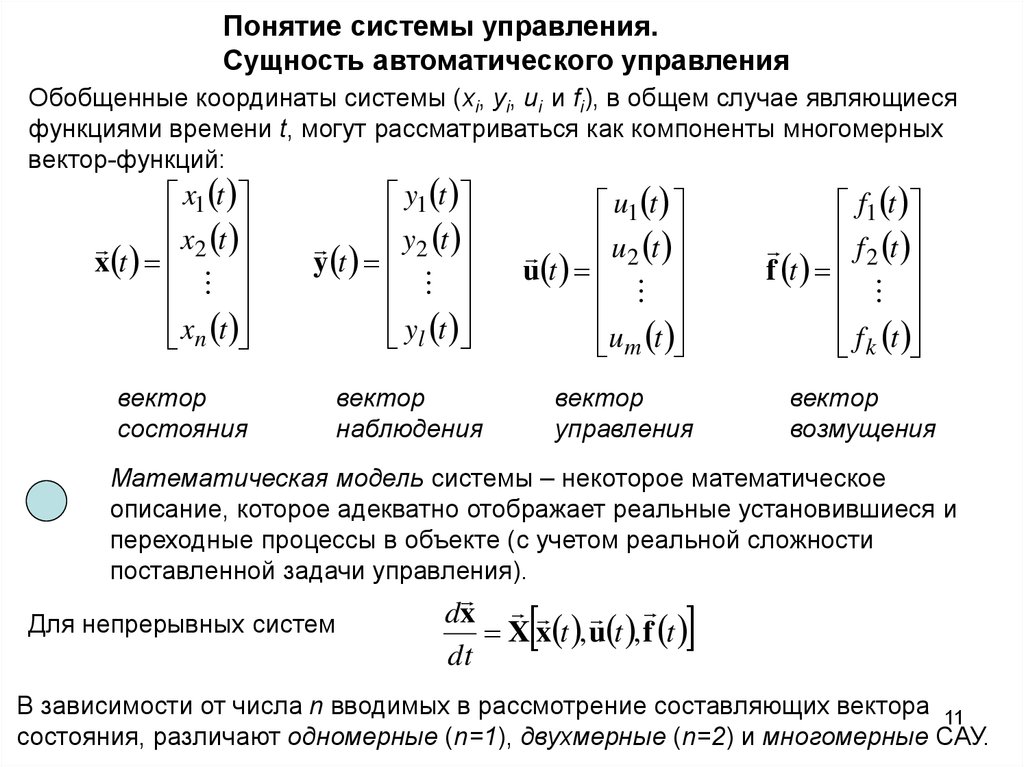
Понятие системы управления.Сущность автоматического управления
Обобщенные координаты системы (xi, yi, ui и fi), в общем случае являющиеся
функциями времени t, могут рассматриваться как компоненты многомерных
вектор-функций:
x1 t
x t
x t 2
x
t
n
y1 t
y t
y t 2
y
t
l
вектор
состояния
f1 t
f t
f t 2
f
t
k
u1 t
u t
u t 2
u
t
m
вектор
наблюдения
вектор
управления
вектор
возмущения
Математическая модель системы – некоторое математическое
описание, которое адекватно отображает реальные установившиеся и
переходные процессы в объекте (с учетом реальной сложности
поставленной задачи управления).
Для непрерывных систем
dx
X x t , u t , f t
dt
В зависимости от числа n вводимых в рассмотрение составляющих вектора 11
состояния, различают одномерные (n=1), двухмерные (n=2) и многомерные САУ.
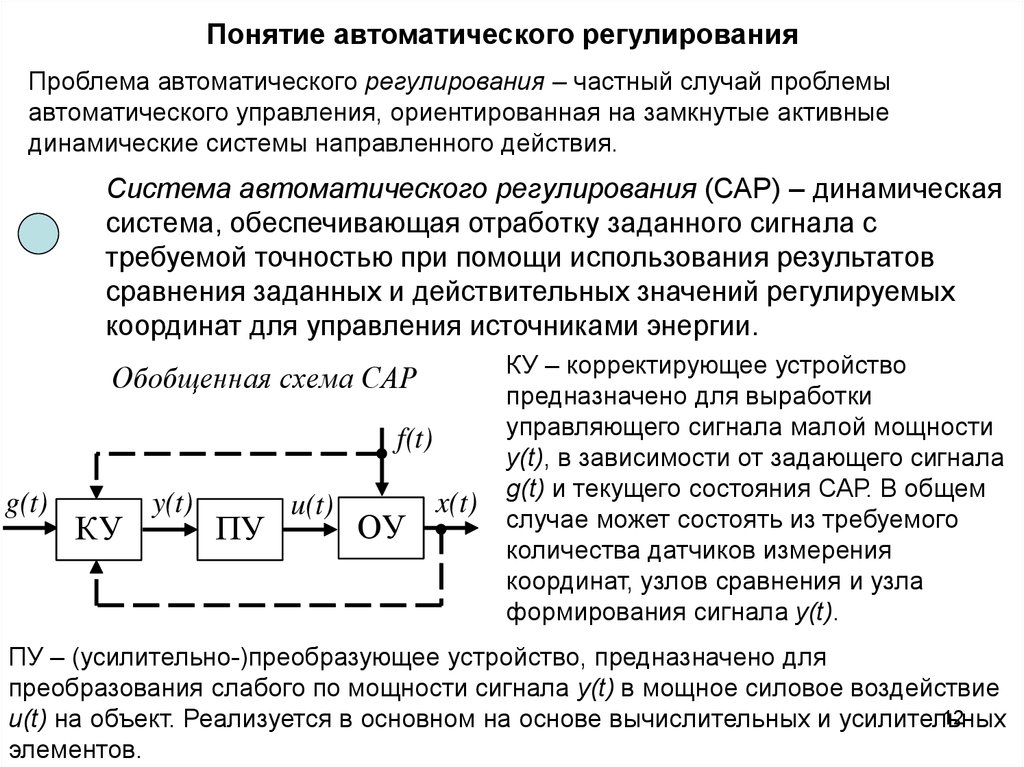
12.
Понятие автоматического регулированияПроблема автоматического регулирования – частный случай проблемы
автоматического управления, ориентированная на замкнутые активные
динамические системы направленного действия.
Система автоматического регулирования (САР) – динамическая
система, обеспечивающая отработку заданного сигнала с
требуемой точностью при помощи использования результатов
сравнения заданных и действительных значений регулируемых
координат для управления источниками энергии.
Обобщенная схема САР
f(t)
g(t)
КУ
y(t)
ПУ
u(t)
ОУ
x(t)
КУ – корректирующее устройство
предназначено для выработки
управляющего сигнала малой мощности
y(t), в зависимости от задающего сигнала
g(t) и текущего состояния САР. В общем
случае может состоять из требуемого
количества датчиков измерения
координат, узлов сравнения и узла
формирования сигнала y(t).
ПУ – (усилительно-)преобразующее устройство, предназначено для
преобразования слабого по мощности сигнала y(t) в мощное силовое воздействие
12
u(t) на объект. Реализуется в основном на основе вычислительных и усилительных
элементов.
13.
Понятие автоматического регулированияПоследовательность решения задачи регулирования:
1. Выбор датчиков для измерения выходных переменных ОУ;
2. Выбор преобразующих устройств для воздействия на ОУ;
3. Разработка математических моделей ОУ, датчиков и ПУ;
4. Проектирование корректирующего устройства на основе
разработанных моделей и принятых критериев качества;
5. Оценка результатов синтеза САР аналитически, путем
математического моделирования и, наконец, на экспериментальном
стенде (путем физического моделирования);
6. Если испытание экспериментального образца дает
неудовлетворительные результаты, следует повторить этапы 1 – 5.
13
14.
Критерии качества регулированияОсновным требованием, предъявляемым к САР, является обеспечение в
допустимых пределах значений ошибок между требуемыми и действительными
изменениями регулируемых величин.
Как правило, чем жестче требования к точности (чем выше требуемое качество
регулирования), тем сложнее окажется САР. Поэтому нужно стремиться к
разумному компромиссу между достижением возможно более высокого
качества работы системы и использованием при этом возможно более простых
технических средств.
Категории требований, предъявляемых к САР
• требования к запасу устойчивости системы (обусловливает необходимость
компенсации возмущений);
• требования к величине ошибок в установившемся состоянии (для
обеспечения статической точности САР);
• требования к поведению системы в переходном режиме (условия качества);
• требования к величине ошибок при наличии непрерывно меняющихся
воздействий (для обеспечения динамической точности САР);
• требования по ограничению на чувствительность САР к изменению
параметров ОУ.
14
15.
Основные принципы управления1. Разомкнутое управление
• принцип наиболее прост в реализации;
f(t)
g(t)
ПУ
u(t)
x(t)
ОУ
Обобщенная схема
разомкнутой САР
• не требует КУ (обычно);
• качество регулирования определяется
свойствами ОУ;
• важный недостаток – высокая
параметрическая чувствительность
З
ЗЧ
ПЧ
УУК
АД
САР для частотного пуска АД (U = const)
как пример разомкнутой САР
15
16.
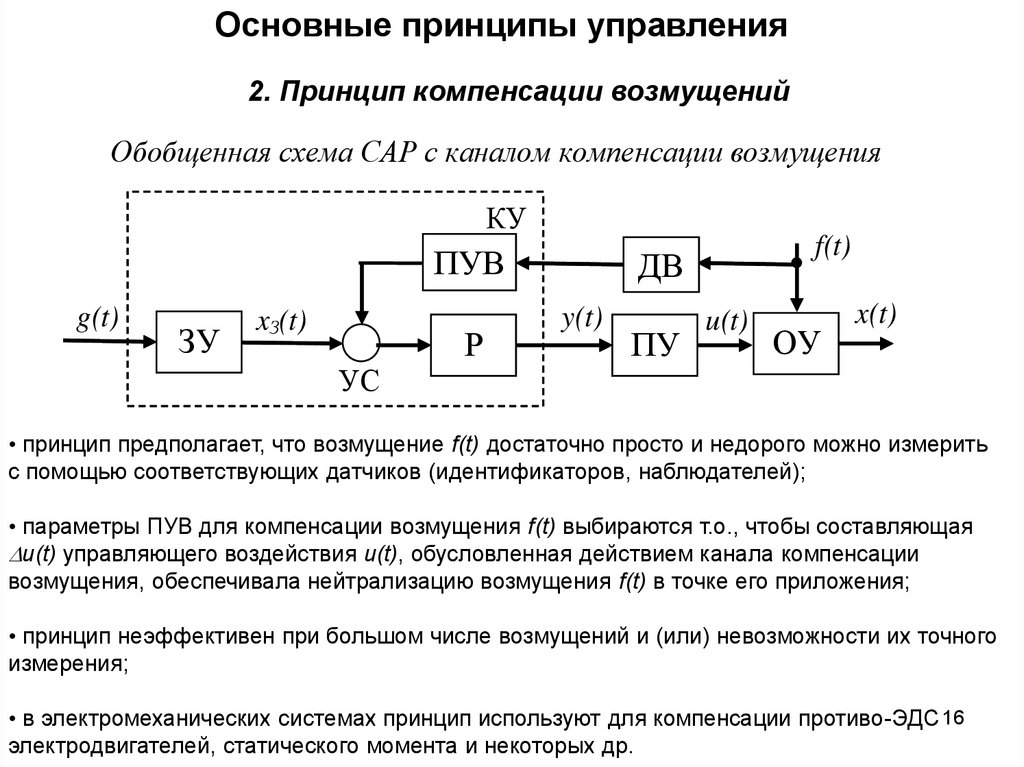
Основные принципы управления2. Принцип компенсации возмущений
Обобщенная схема САР с каналом компенсации возмущения
КУ
ПУВ
g(t)
ЗУ
xЗ(t)
Р
f(t)
ДВ
y(t)
ПУ
u(t)
ОУ
x(t)
УС
• принцип предполагает, что возмущение f(t) достаточно просто и недорого можно измерить
с помощью соответствующих датчиков (идентификаторов, наблюдателей);
• параметры ПУВ для компенсации возмущения f(t) выбираются т.о., чтобы составляющая
u(t) управляющего воздействия u(t), обусловленная действием канала компенсации
возмущения, обеспечивала нейтрализацию возмущения f(t) в точке его приложения;
• принцип неэффективен при большом числе возмущений и (или) невозможности их точного
измерения;
• в электромеханических системах принцип используют для компенсации противо-ЭДС 16
электродвигателей, статического момента и некоторых др.
17.
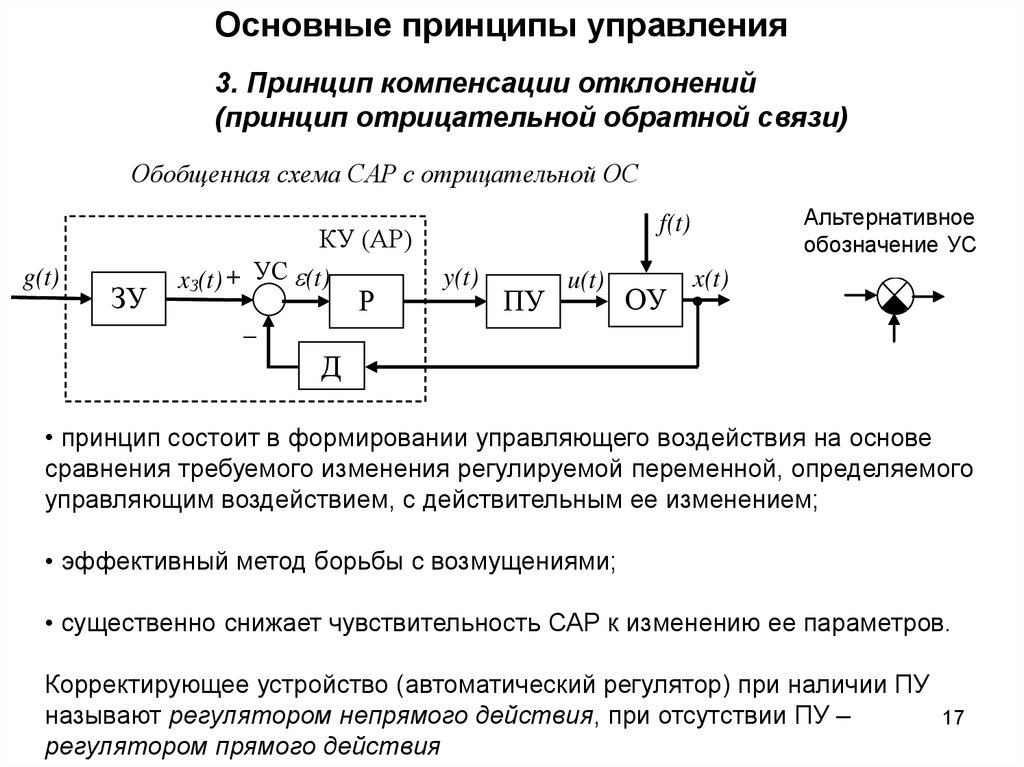
Основные принципы управления3. Принцип компенсации отклонений
(принцип отрицательной обратной связи)
Обобщенная схема САР с отрицательной ОС
g(t)
ЗУ
КУ (АР)
xЗ(t) + УС (t)
Р
Альтернативное
обозначение УС
f(t)
y(t)
ПУ
u(t)
ОУ
x(t)
–
Д
• принцип состоит в формировании управляющего воздействия на основе
сравнения требуемого изменения регулируемой переменной, определяемого
управляющим воздействием, с действительным ее изменением;
• эффективный метод борьбы с возмущениями;
• существенно снижает чувствительность САР к изменению ее параметров.
Корректирующее устройство (автоматический регулятор) при наличии ПУ
называют регулятором непрямого действия, при отсутствии ПУ –
регулятором прямого действия
17
18.
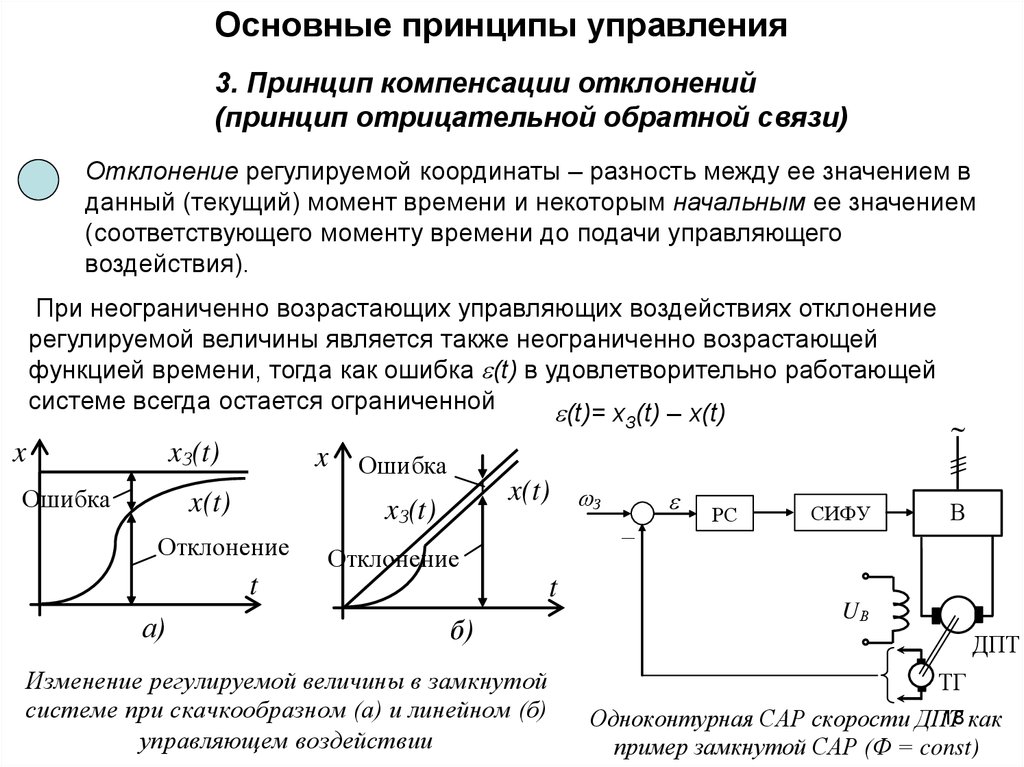
Основные принципы управления3. Принцип компенсации отклонений
(принцип отрицательной обратной связи)
Отклонение регулируемой координаты – разность между ее значением в
данный (текущий) момент времени и некоторым начальным ее значением
(соответствующего моменту времени до подачи управляющего
воздействия).
При неограниченно возрастающих управляющих воздействиях отклонение
регулируемой величины является также неограниченно возрастающей
функцией времени, тогда как ошибка (t) в удовлетворительно работающей
системе всегда остается ограниченной
(t)= x (t) – x(t)
З
x
xЗ(t)
Ошибка
x
x(t)
Ошибка
x(t) З
xЗ(t)
Отклонение
t
б)
Изменение регулируемой величины в замкнутой
системе при скачкообразном (а) и линейном (б)
управляющем воздействии
–
Отклонение
t
а)
РС
СИФУ
В
UВ
ДПТ
ТГ
18 как
Одноконтурная САР скорости ДПТ
пример замкнутой САР (Ф = const)
19.
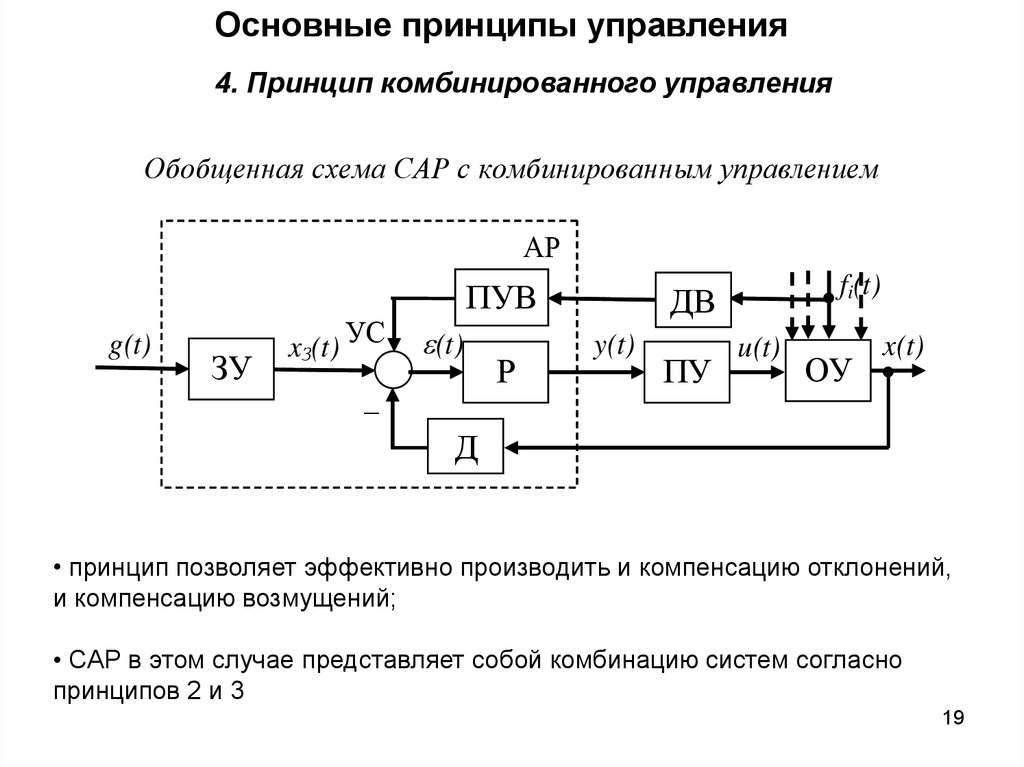
Основные принципы управления4. Принцип комбинированного управления
Обобщенная схема САР с комбинированным управлением
АР
g(t)
ЗУ
xЗ(t) УС
ПУВ
(t)
Р
fi(t)
ДВ
y(t)
ПУ
u(t)
ОУ
x(t)
–
Д
• принцип позволяет эффективно производить и компенсацию отклонений,
и компенсацию возмущений;
• САР в этом случае представляет собой комбинацию систем согласно
принципов 2 и 3
19
20.
Классификации САР1. В зависимости от возлагаемых задач:
системы автоматической стабилизации, в которых задающие
воздействия g(t) представляют собой заданные постоянные величины;
системы программного регулирования, в которых одно или несколько
задающих воздействий являются известными функциями времени, а
остальные – заданными постоянными величинами;
следящие системы, в которых все или некоторые управляющие
воздействия представляют собой заранее неизвестные функции времени;
экстремальные системы, задача которых состоит в поддержании
некоторой регулируемой переменной, определяемой принятым критерием
качества, на экстремальном уровне (например, регулирование с
максимальным КПД и др.)
20
21.
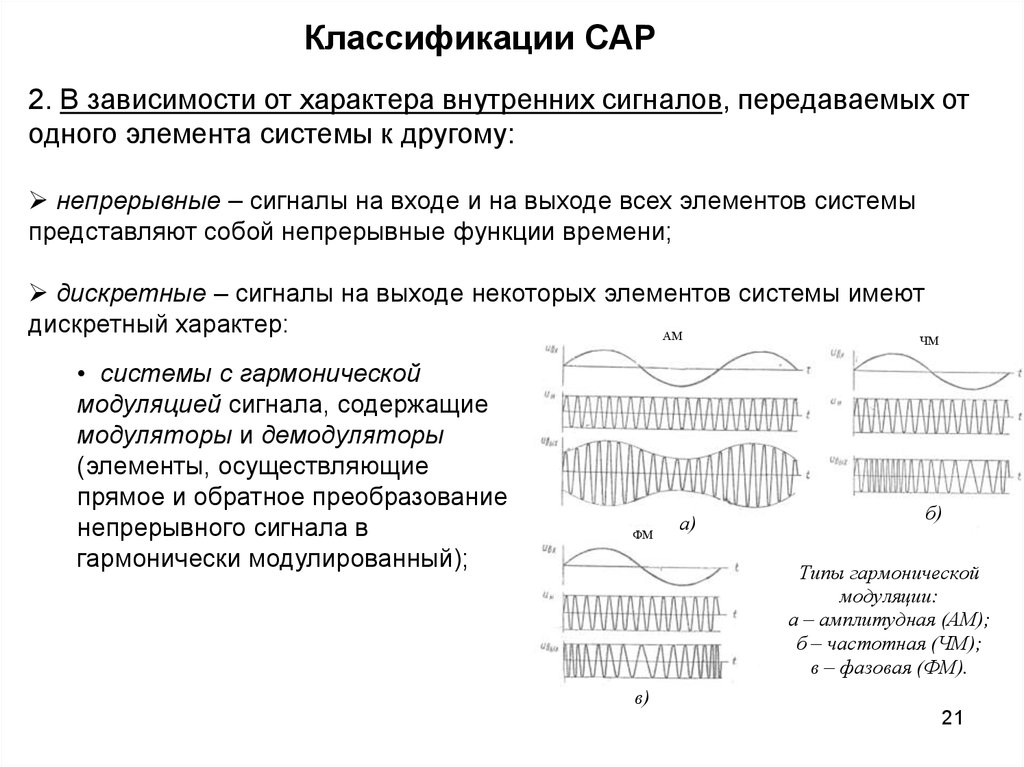
Классификации САР2. В зависимости от характера внутренних сигналов, передаваемых от
одного элемента системы к другому:
непрерывные – сигналы на входе и на выходе всех элементов системы
представляют собой непрерывные функции времени;
дискретные – сигналы на выходе некоторых элементов системы имеют
дискретный характер:
АМ
ЧМ
• системы с гармонической
модуляцией сигнала, содержащие
модуляторы и демодуляторы
(элементы, осуществляющие
прямое и обратное преобразование
непрерывного сигнала в
гармонически модулированный);
ФМ
а)
б)
Типы гармонической
модуляции:
а – амплитудная (АМ);
б – частотная (ЧМ);
в – фазовая (ФМ).
в)
21
22.
Классификации САР2. В зависимости от характера внутренних сигналов, передаваемых от
одного элемента системы к другому:
• импульсные, или системы с импульсной модуляцией сигнала,
содержащие импульсные элементы (импульсные модуляторы и
экстраполяторы) и осуществляющие квантование сигнала по времени;
АИМ
а)
ЧИМ
в)
ШИМ
б)
Типы импульсной модуляции:
а – амплитудно-импульсная
(АИМ);
б – широтно-импульсная
(ШИМ);
в – частотно-импульсная
(ЧИМ).
22
23.
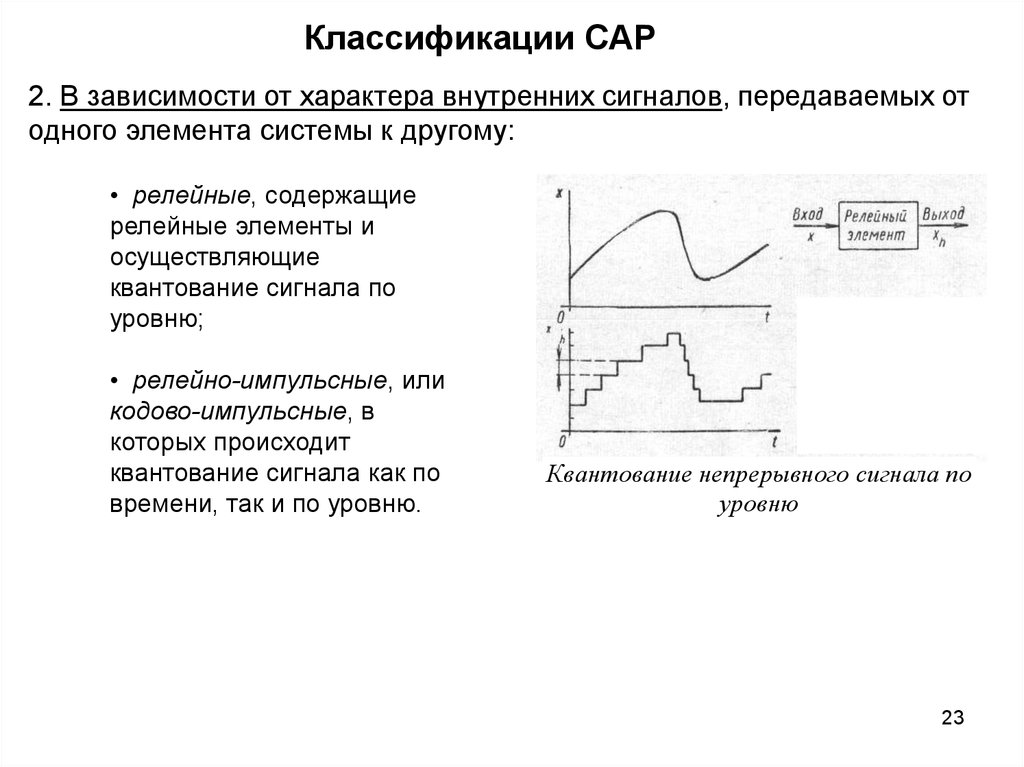
Классификации САР2. В зависимости от характера внутренних сигналов, передаваемых от
одного элемента системы к другому:
• релейные, содержащие
релейные элементы и
осуществляющие
квантование сигнала по
уровню;
• релейно-импульсные, или
кодово-импульсные, в
которых происходит
квантование сигнала как по
времени, так и по уровню.
Квантование непрерывного сигнала по
уровню
23
24.
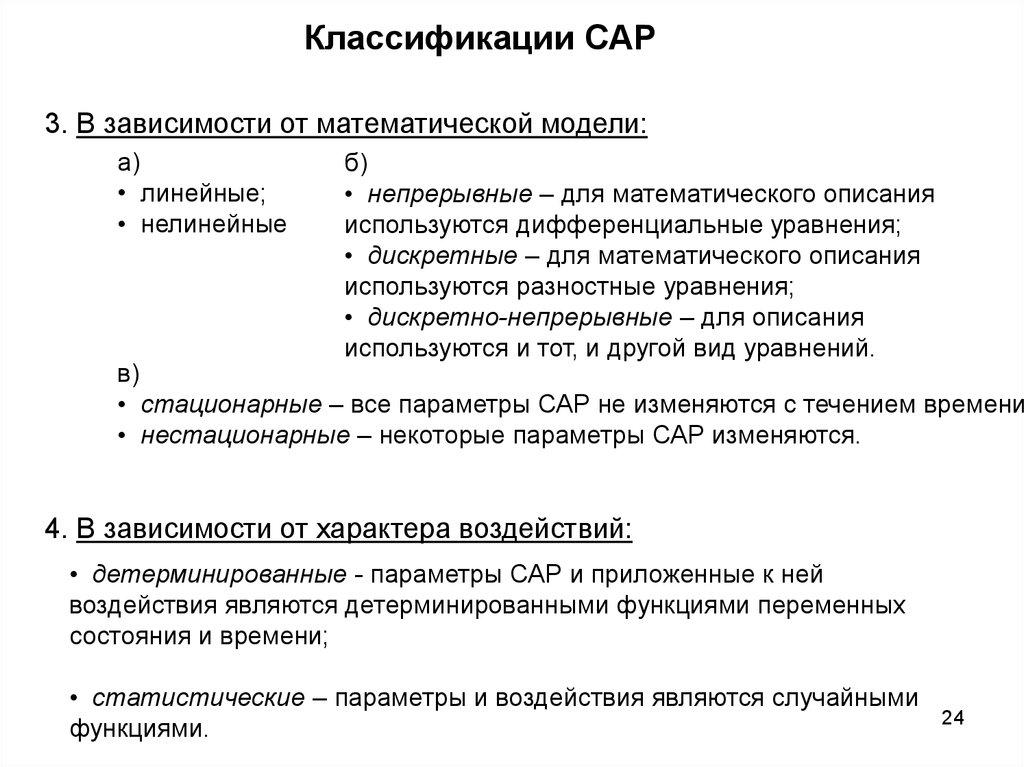
Классификации САР3. В зависимости от математической модели:
а)
• линейные;
• нелинейные
б)
• непрерывные – для математического описания
используются дифференциальные уравнения;
• дискретные – для математического описания
используются разностные уравнения;
• дискретно-непрерывные – для описания
используются и тот, и другой вид уравнений.
в)
• стационарные – все параметры САР не изменяются с течением времени
• нестационарные – некоторые параметры САР изменяются.
4. В зависимости от характера воздействий:
• детерминированные - параметры САР и приложенные к ней
воздействия являются детерминированными функциями переменных
состояния и времени;
• статистические – параметры и воздействия являются случайными
функциями.
24