




















 physics
physicsSimilar presentations:










Теория Автоматического Управления
1. Теория Автоматического Управления
ТЕОРИЯ АВТОМАТИЧЕСКОГОУПРАВЛЕНИЯ
Системы Автоматического
Управления
Введение
Чубарь Алексей Владимирович
2.
Теория автоматического управленияОсновные понятия и определения
2
Теория автоматического управления – наука, изучающая:
принципы построения систем автоматического управления;
закономерности переходных процессов, протекающих в
системах;
методы анализа и синтеза;
методы структурных преобразований, обеспечивающих
требуемое качество и точность систем автоматического
управления.
3.
Теория автоматического управленияОсновные понятия и определения
3
Теория автоматического управления базируется на
таких понятиях, как
система автоматического управления (САУ),
объект управления (ОУ),
устройство управления (УУ),
принципы управления,
задающее воздействие,
управляемая величина,
возмущающее воздействие,
управляющее воздействие и др.
4.
Общие понятия4
Автоматика – наука об общих принципах и методах
построения автоматически действующих устройств и систем.
Автоматическое управление – совокупность операций,
необходимых для пуска и остановки процесса, а также для
поддержания или изменения в требуемом направлении
величин, характеризующих процесс.
Совокупность операций управления, которые относятся к
поддержанию или изменению показателей процесса,
представляют собой регулирование.
5.
Общие понятия5
Автоматическое
устройство,
автоматическое
регулирование,
автоматическим регулятором.
осуществляющее
называется
Под объектом автоматического управления понимают
машину или установку, требуемый режим работы которой
поддерживается устройством управления.
Объект управления (ОУ) вместе с присоединенным к нему
устройством
управления
образует
систему
автоматического управления.
6.
Общие понятия6
При автоматизации любого объекта его технические данные
определяют
входные
(количественные)
и
выходные
(качественные) параметры.
К входным параметрам относят физические величины
характеризирующие сырье и энергетические потоки.
- Контролируемые (управляющие воздействия)
-
- Неконтролируемые (возмущающие воздействия)
Выходные параметры характеризуют текущее состояние
системы. Выходными величинами являются текущие расходы
готовых продуктов, любой физический, химический или
органолептический показатель готового продукта, а также
режимные показатели, такие как температура, давление и т.д.
Изменения
отклонениями.
качественных
параметров
называют
7. Основные определения и понятия
7Управление– целенаправленное воздействие на
объект (автомобиль, станок, атомный реактор,
фирму, завод…) приводящее его в требуемое
состояние.
Автоматическое управление – управление
без участия человека (чем проще объект
управления, тем проще исключить человека)
8. Основные определения и понятия
8F(t)
G(t)
УУ
V(t)
(устройство управления)
ОУ
Y(t)
(объект управления)
V(t) – вектор управляющего
воздействия
Y(t) – вектор выходных координат
F(t) – возмущающее воздействие
(помехи)
G(t) – задающее воздействие
3 типа управления:
1)Ручное (YX, человек)
2)Автоматизированное
(АСУ, ИУС)
3 ) Автоматическое (САУ)
Регулирование – частный случай управления техническими
системами. Регулирование направлено на поддержание объектом
заданного состояния.
9.
Основные определения и понятия9
В зависимости от степени участия оператора в процессе
управления различают следующие режимы:
автоматическое управление – автоматический режим, при
котором управление происходит без участия оператора, но по
его заданию и при его контроле;
полуавтоматическое управление (автоматизированное) –
полуавтоматический режим, при котором реализация основных
командных операций по управлению возлагается на оператора;
ручное управление – ручной режим, при котором все операции
по управлению осуществляются оператором.
В зависимости от места расположения командной аппаратуры
управления в автоматизированном и ручном режимах может быть
местным
(аппаратура
управления
устанавливается
непосредственно у оборудования) либо дистанционным.
10.
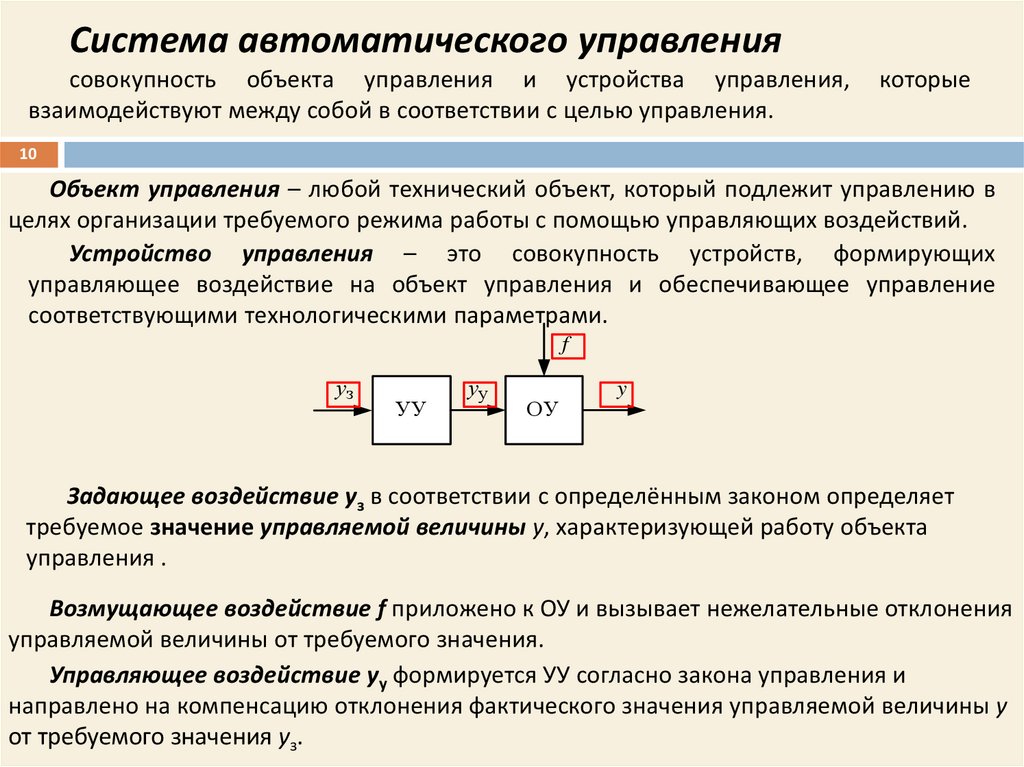
Система автоматического управлениясовокупность объекта управления и устройства управления,
взаимодействуют между собой в соответствии с целью управления.
которые
10
Объект управления – любой технический объект, который подлежит управлению в
целях организации требуемого режима работы с помощью управляющих воздействий.
Устройство управления – это совокупность устройств, формирующих
управляющее воздействие на объект управления и обеспечивающее управление
соответствующими технологическими параметрами.
f
уз
УУ
уу
ОУ
y
Задающее воздействие уз в соответствии с определённым законом определяет
требуемое значение управляемой величины у, характеризующей работу объекта
управления .
Возмущающее воздействие f приложено к ОУ и вызывает нежелательные отклонения
управляемой величины от требуемого значения.
Управляющее воздействие уу формируется УУ согласно закона управления и
направлено на компенсацию отклонения фактического значения управляемой величины у
от требуемого значения уз.
11.
Система автоматического управления11
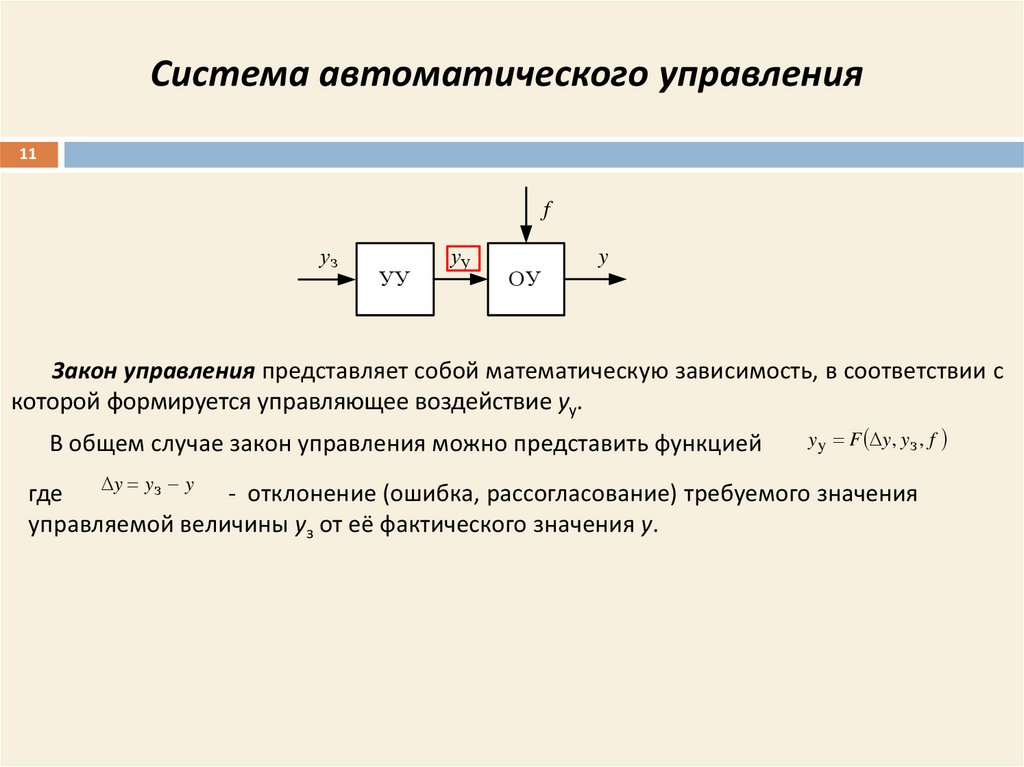
f
уз
УУ
уу
ОУ
y
Закон управления представляет собой математическую зависимость, в соответствии с
которой формируется управляющее воздействие уу.
y y F y, y з , f
В общем случае закон управления можно представить функцией
где y yз y - отклонение (ошибка, рассогласование) требуемого значения
управляемой величины уз от её фактического значения у.
12. Ручное управление
12Пример: последовательность действий при установке и
поддержании желаемой температуры воды на выходе из смесителя.
Порядок действий:
1. определение температуры воды;
2. принятие решения и при
необходимости его реализация путем
увеличения или уменьшения расхода
горячей воды;
Качество регулирования зависит:
1. характера возмущений расходов и давлений горячей и
холодной воды. 2 опыта (интеллекта) человека
Недостатки: рутинность, т.е. если выполнять данные действия
долгий промежуток времени, человек устанет, а следовательно
снизится качество
13. Управление с участием человека (чем сложнее объект управления, тем сложнее полностью исключить человека из процесса
Автоматизированное управление13
Управление с участием человека (чем сложнее объект
управления, тем сложнее полностью исключить человека из
процесса управления).
Например: процесс производства тепла и электроэнергии
в энергетическом блоке котел-турбина или выработка пара в
котле.
Автоматизированная система является сложным
комплексом, который состоит из множества систем
дистанционного управления, САР, программного или
оптимального управления.
Главная особенность автоматизированных систем –
наличие человека-оператора
Управление экономическими объектами как
правило автоматизированное.
14.
Автоматическое управление14
Основные виды автоматического управления:
1.Стабилизация параметров непрерывных технологических
процессов, таких как давление, температура, уровень, расход и т.д.
Пример: в быту - электрический утюг или холодильник, в
которых поддерживается постоянная температура нагрева и
охлаждения.
2. Программное управление или программное регулирование
режимом работы объекта по заранее заданной программе.
Широко применяется в процессах плавного пуска и останова
технологического оборудования
Пример: управление с целью изменения температуры воды на
выходе из смесителя по заданной программе, например медленное,
со скоростью 5 С в минуту, увеличение температуры.
15. Магистральная линия развития НТП
15Механизированн
ое производство
(ручное,
дистанционное
управление)
Автоматизир
ованное
управление
Автоматиче
ское
управление
16.
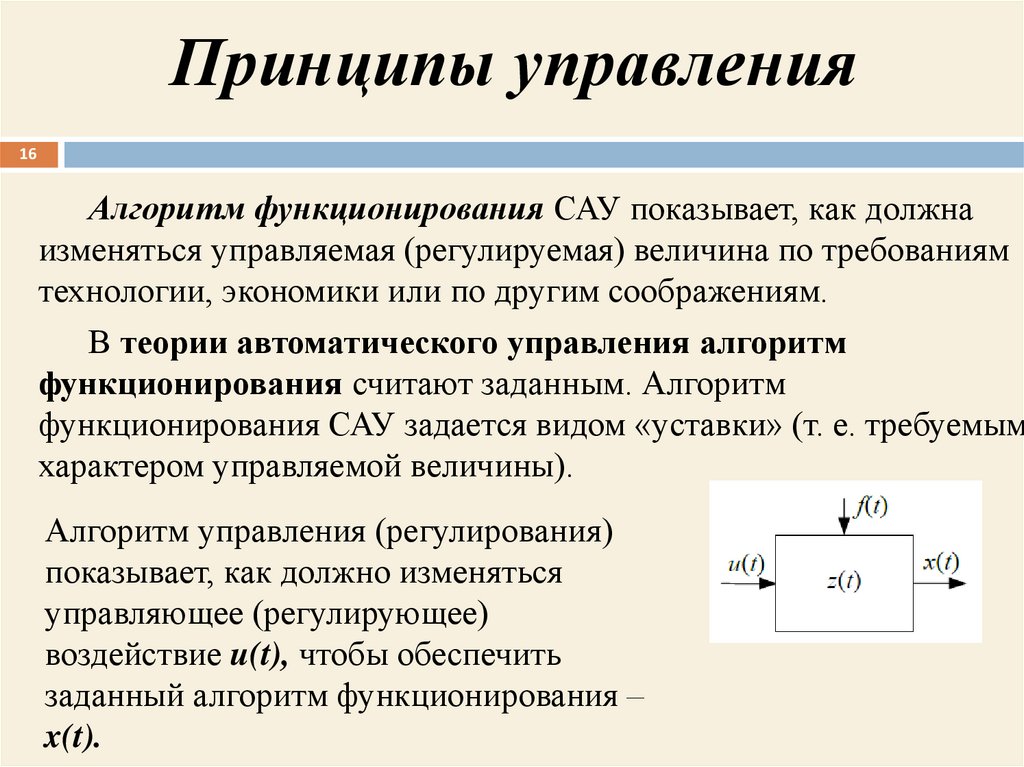
Принципы управления16
Алгоритм функционирования САУ показывает, как должна
изменяться управляемая (регулируемая) величина по требованиям
технологии, экономики или по другим соображениям.
В теории автоматического управления алгоритм
функционирования считают заданным. Алгоритм
функционирования САУ задается видом «уставки» (т. е. требуемым
характером управляемой величины).
Алгоритм управления (регулирования)
показывает, как должно изменяться
управляющее (регулирующее)
воздействие u(t), чтобы обеспечить
заданный алгоритм функционирования –
x(t).
17. Системы Автоматического Управления
17Классификация САУ
1) По принципу регулирования
а) разомкнутые
б) регулирование по возмущению
в) регулирование в замкнутой системе на
ошибке или задержке
г)комбинированное управление
18. Системы Автоматического Управления
18Классификация САУ
2) По характеру задающего воздействия
а) системы стабилизации
б)системы программного управления
в) следящие системы
19. Системы Автоматического Управления
19Классификация САУ
3) По характеру сигнала
а)непрерывного действия
б)дискретного действия
4) По виду математического описания
а) линейные
б) нелинейные
5) По уровню организации
а)обычные системы
б)адаптивные системы
(самонастраивающиеся, самообучающиеся,
самоорганизующиеся)
20.
Системы Автоматического Управления20
Классификация САУ
6. По числу управляемых величин:
– САУ одноканальные (с одной управляемой величиной);
– САУ многоканальные (с несколькими управляемыми величинами).
7. По виду используемой энергии:
– электрические;
– гидравлические;
– пневматические;
– электрогидравлические;
– электропневматические.
21.
Принципы управления21
В настоящее время в технике известны и
используются три принципа управления
(регулирования):
принцип разомкнутого управления
(регулирования);
принцип компенсации возмущений – управление
(регулирование) по возмущению;
принцип обратной связи –
управление (регулирование) по отклонению.
22.
а. Принцип разомкнутого управления22
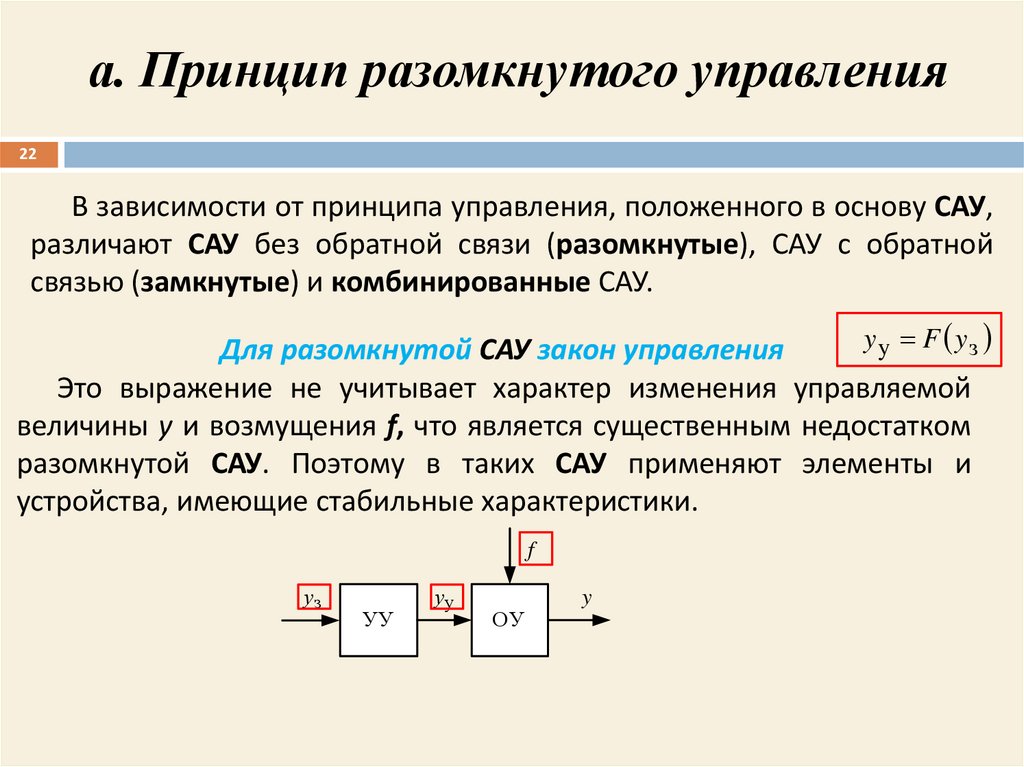
В зависимости от принципа управления, положенного в основу САУ,
различают САУ без обратной связи (разомкнутые), САУ с обратной
связью (замкнутые) и комбинированные САУ.
y y F yз
Для разомкнутой САУ закон управления
Это выражение не учитывает характер изменения управляемой
величины у и возмущения f, что является существенным недостатком
разомкнутой САУ. Поэтому в таких САУ применяют элементы и
устройства, имеющие стабильные характеристики.
f
уз
УУ
уу
ОУ
y
23.
а. Принцип разомкнутого управления23
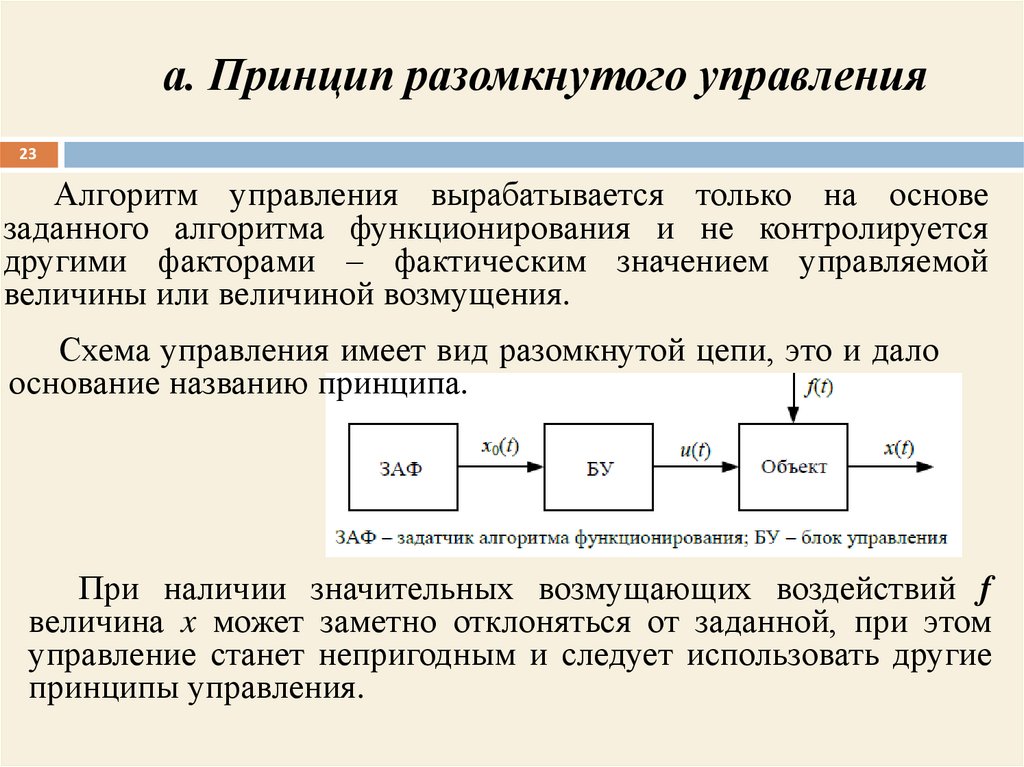
Алгоритм управления вырабатывается только на основе
заданного алгоритма функционирования и не контролируется
другими факторами – фактическим значением управляемой
величины или величиной возмущения.
Схема управления имеет вид разомкнутой цепи, это и дало
основание названию принципа.
При наличии значительных возмущающих воздействий f
величина x может заметно отклоняться от заданной, при этом
управление станет непригодным и следует использовать другие
принципы управления.
24. Функциональная схема разомкнутой САУ
2425.
б) Принцип компенсации возмущений(управление по возмущению)
25
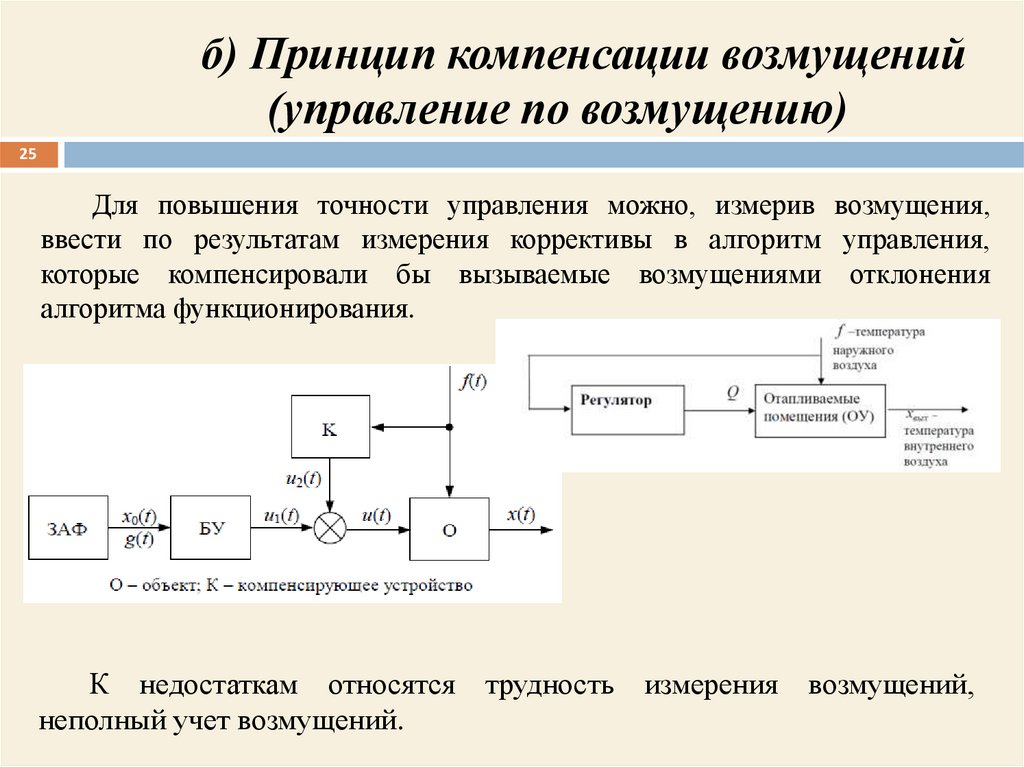
Для повышения точности управления можно, измерив возмущения,
ввести по результатам измерения коррективы в алгоритм управления,
которые компенсировали бы вызываемые возмущениями отклонения
алгоритма функционирования.
К недостаткам относятся
неполный учет возмущений.
трудность
измерения
возмущений,
26.
б) Принцип управления по возмущению26
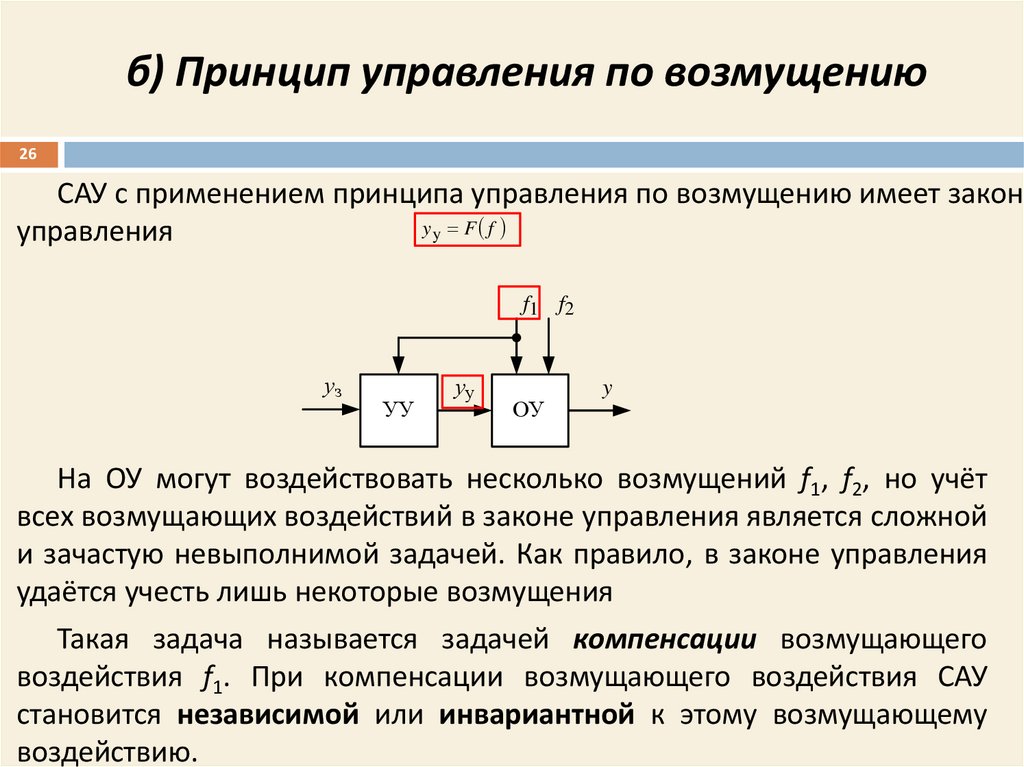
САУ с применением принципа управления по возмущению имеет закон
yy F f
управления
f1 f2
уз
УУ
уу
ОУ
y
На ОУ могут воздействовать несколько возмущений f1, f2, но учёт
всех возмущающих воздействий в законе управления является сложной
и зачастую невыполнимой задачей. Как правило, в законе управления
удаётся учесть лишь некоторые возмущения
Такая задача называется задачей компенсации возмущающего
воздействия f1. При компенсации возмущающего воздействия САУ
становится независимой или инвариантной к этому возмущающему
воздействию.
27. Функциональная схема САУ c регулированием по ВОЗМУЩЕНИЮ
27u(t)=F[f(t)]
28.
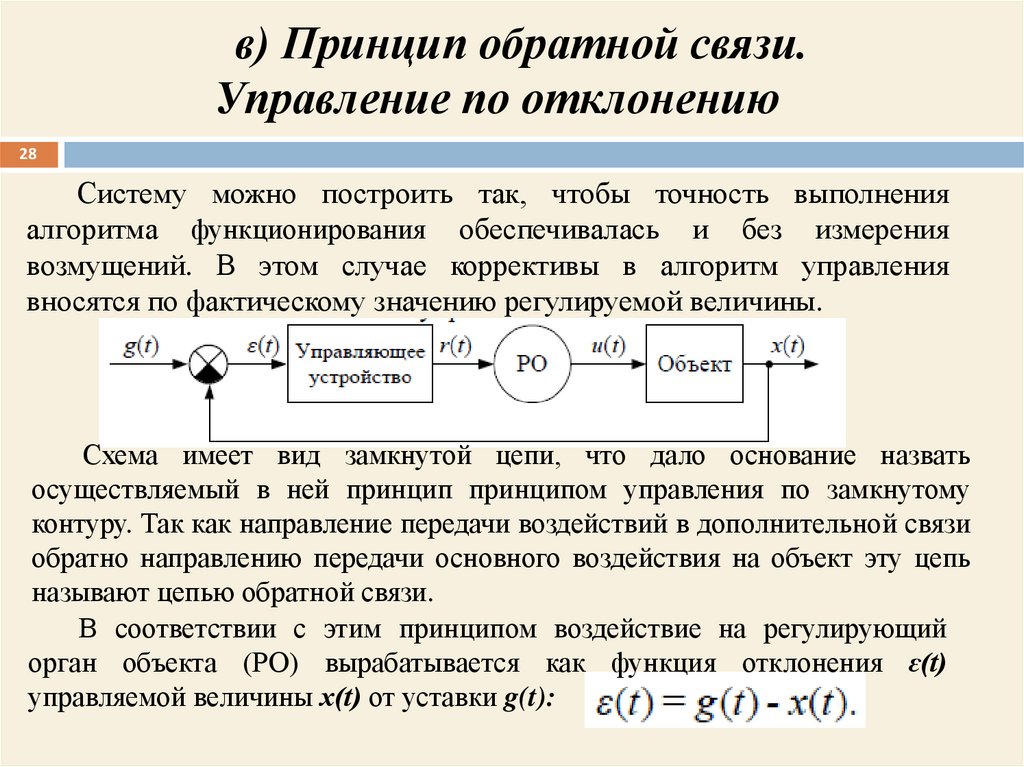
в) Принцип обратной связи.Управление по отклонению
28
Систему можно построить так, чтобы точность выполнения
алгоритма функционирования обеспечивалась и без измерения
возмущений. В этом случае коррективы в алгоритм управления
вносятся по фактическому значению регулируемой величины.
Схема имеет вид замкнутой цепи, что дало основание назвать
осуществляемый в ней принцип принципом управления по замкнутому
контуру. Так как направление передачи воздействий в дополнительной связи
обратно направлению передачи основного воздействия на объект эту цепь
называют цепью обратной связи.
В соответствии с этим принципом воздействие на регулирующий
орган объекта (РО) вырабатывается как функция отклонения ɛ(t)
управляемой величины х(t) от уставки g(t):
29.
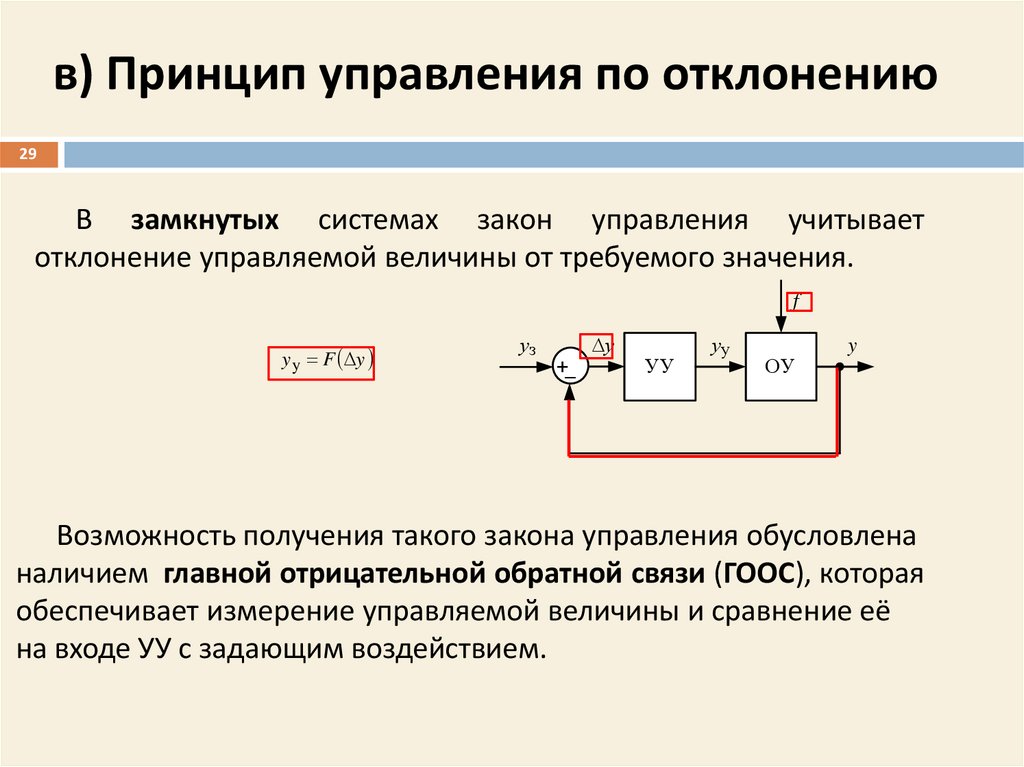
в) Принцип управления по отклонению29
В замкнутых системах закон управления учитывает
отклонение управляемой величины от требуемого значения.
f
y y F y
уз
у
+–
УУ
уу
ОУ
y
Возможность получения такого закона управления обусловлена
наличием главной отрицательной обратной связи (ГООС), которая
обеспечивает измерение управляемой величины и сравнение её
на входе УУ с задающим воздействием.
30. Функциональная схема замкнутой САУ
3031.
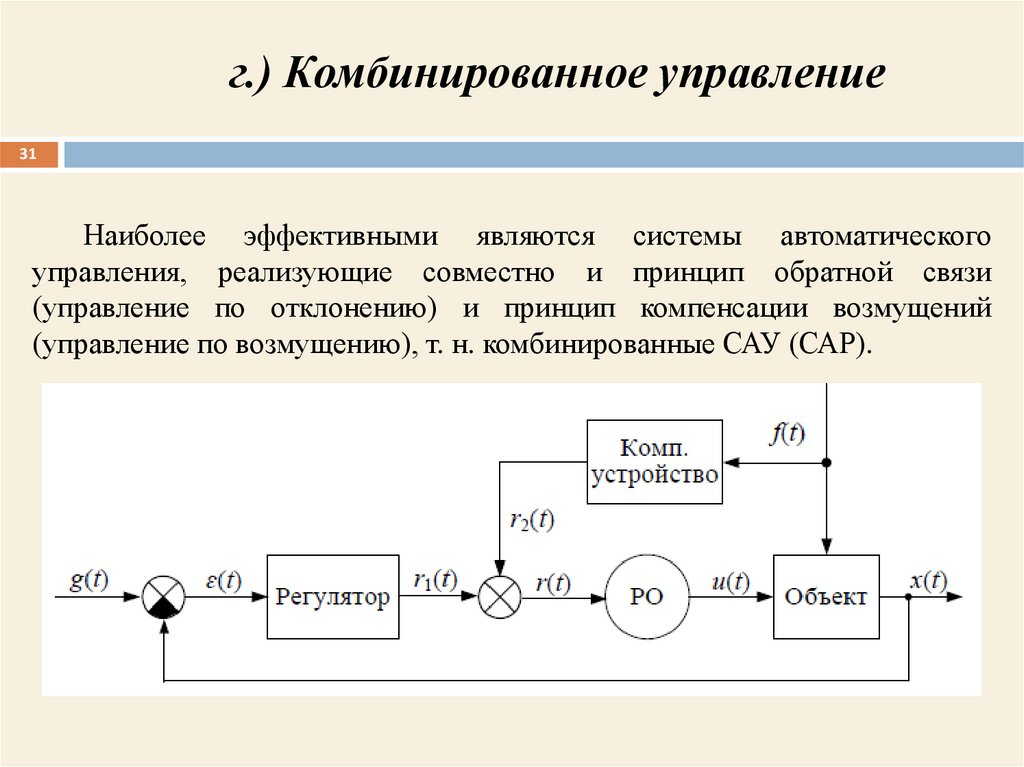
г.) Комбинированное управление31
Наиболее эффективными являются системы автоматического
управления, реализующие совместно и принцип обратной связи
(управление по отклонению) и принцип компенсации возмущений
(управление по возмущению), т. н. комбинированные САУ (САР).
32.
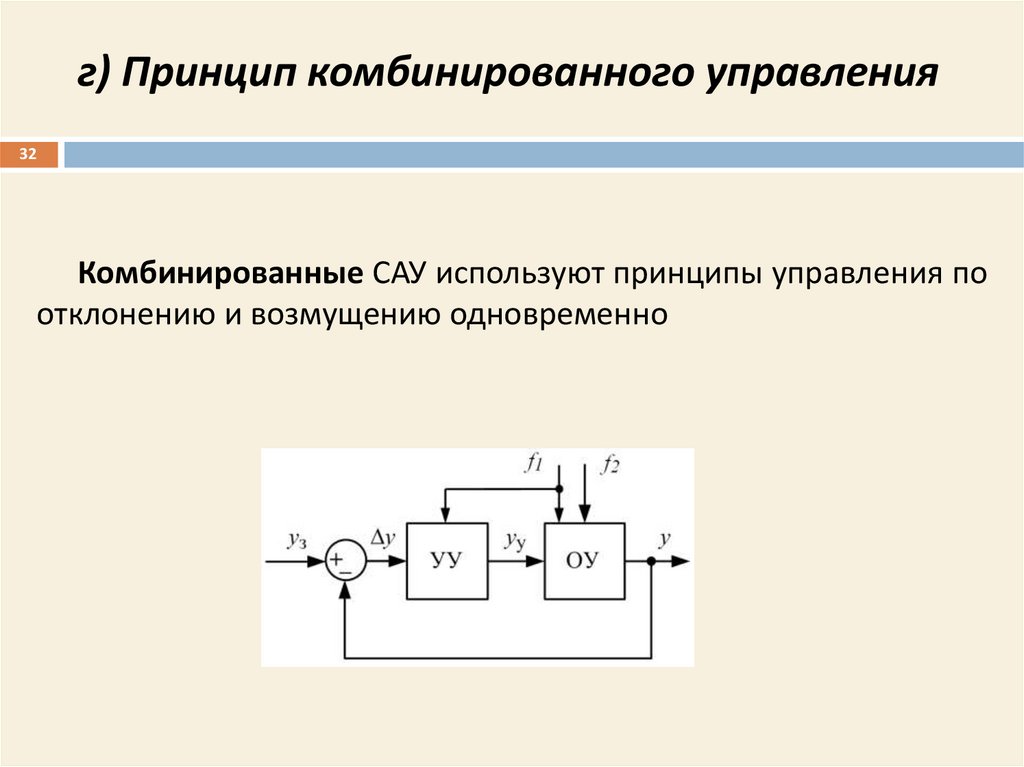
г) Принцип комбинированного управления32
Комбинированные САУ используют принципы управления по
отклонению и возмущению одновременно
33. Функциональная схема комбинированной САУ
3334.
Статические и астатические системы34
Система автоматического управления называется статической по
отношению к управляющему воздействию, если при постоянном
внешнем воздействии, стремящемся с течением времени к
некоторому установившемуся значению, ошибка также стремится к
постоянному значению, зависящему от величины управляющего
воздействия.
Система автоматического управления именуется астатической по
отношению к управляющему воздействию, если при воздействии,
стремящемся к установившемуся значению, ошибка стремится к нулю
независимо от величины воздействия.
На основании этого можно сделать заключение о том, что по
точности астатические системы лучше статических и поэтому
последние годы находят более широкое применение.
35. Системы Автоматического Управления
35Классификация САУ
2) По характеру задающего воздействия
а) системы стабилизации
G=const
б)системы программного управления
G=f(t)
в) следящие системы
G=?
36.
2. Классификация по характеру задающеговоздействия
36
– системы стабилизации (задающее воздействие Хвх(t) = const);
– системы программного управления (задающее воздействие Хвх(t)
известная, заранее заданная функция времени);
– следящие системы (задающее воздействие Хвх(t) является
случайной функцией времени).
Системы стабилизации применяются для поддержания постоянства
управляемых величин различных объектов, например, напряжения
генератора, угловой скорости вращения вала электродвигателя,
температуры, давления в гермокамере и т. д.
Системы программного регулирования применяются для
программного управления технологическими процессами, программного
регулирования температуры, программного управления станками и т. п.
Следящие системы находят применение для управления, например,
пусковой установкой, которая должна занять положение,
соответствующее прибору наведения (прицелу), управляемому
человеком-оператором.
37. Системы Автоматического Управления
37Системы Автоматического
Управления
Классификация САУ
3) По характеру сигнала
а)непрерывного действия
б)дискретного действия
4) По виду математического описания
а) линейные
б) нелинейные
5) По уровню организации
а)обычные системы
б)адаптивные системы
(самонастраивающиеся, самообучающиеся,
самоорганизующиеся)
38. Системы Автоматического Управления
38Функциональная схема
самонастраивающейся системы
39. Системы Автоматического Управления
39Функциональная схема экстремальной САУ
40.
Классификация систем автоматическогоуправления
40
6. По числу управляемых величин:
– САУ одноканальные (с одной управляемой величиной);
– САУ многоканальные (с несколькими управляемыми величинами).
7. По виду используемой энергии:
– электрические;
– гидравлические;
– пневматические;
– электрогидравлические;
– электропневматические.
41.
Функциональная схема системыавтоматического управления
41
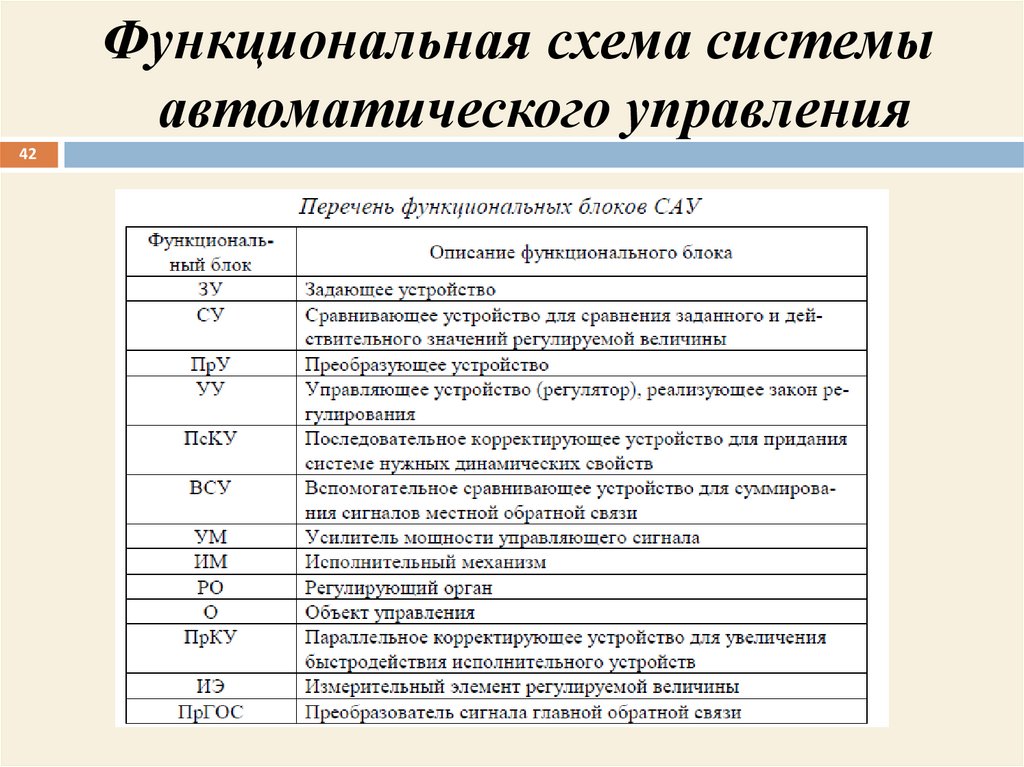
42.
Функциональная схема системыавтоматического управления
42
43.
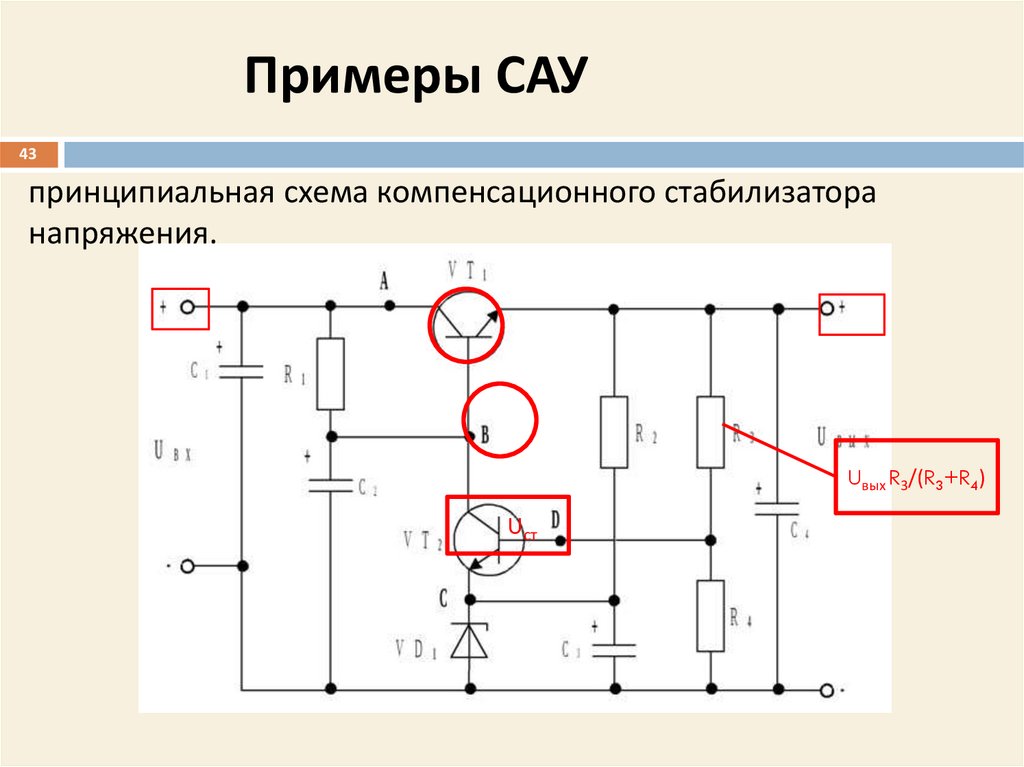
Примеры САУ43
принципиальная схема компенсационного стабилизатора
напряжения.
Uвых R3/(R3+R4)
Uст
44.
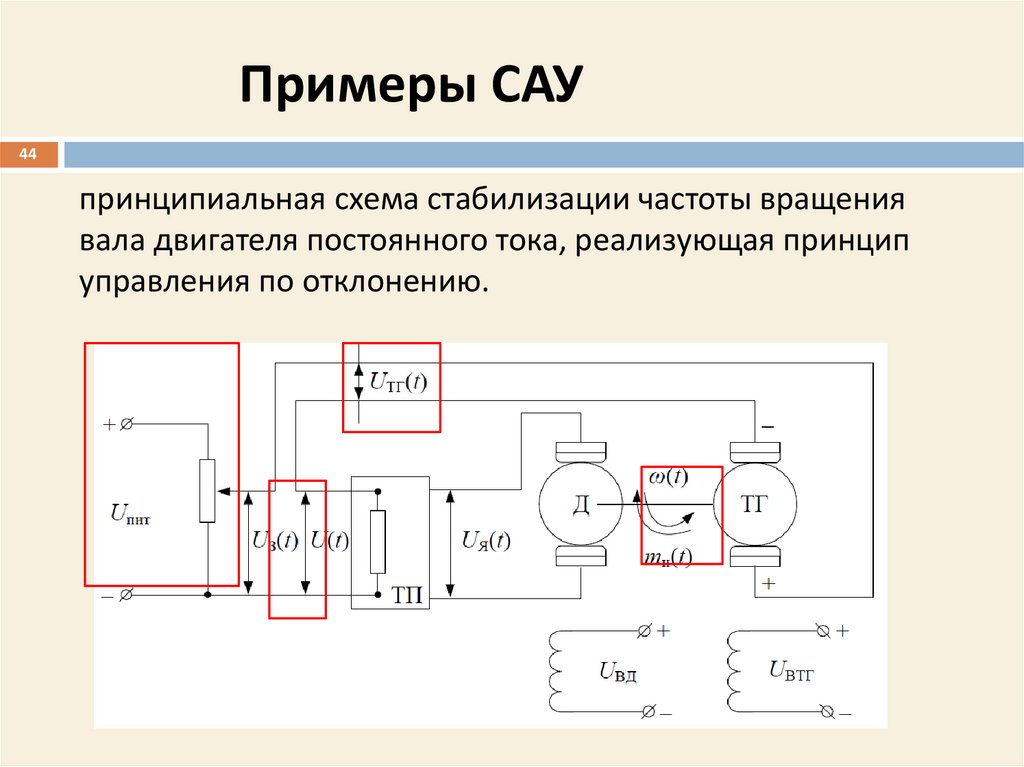
Примеры САУ44
принципиальная схема стабилизации частоты вращения
вала двигателя постоянного тока, реализующая принцип
управления по отклонению.
45.
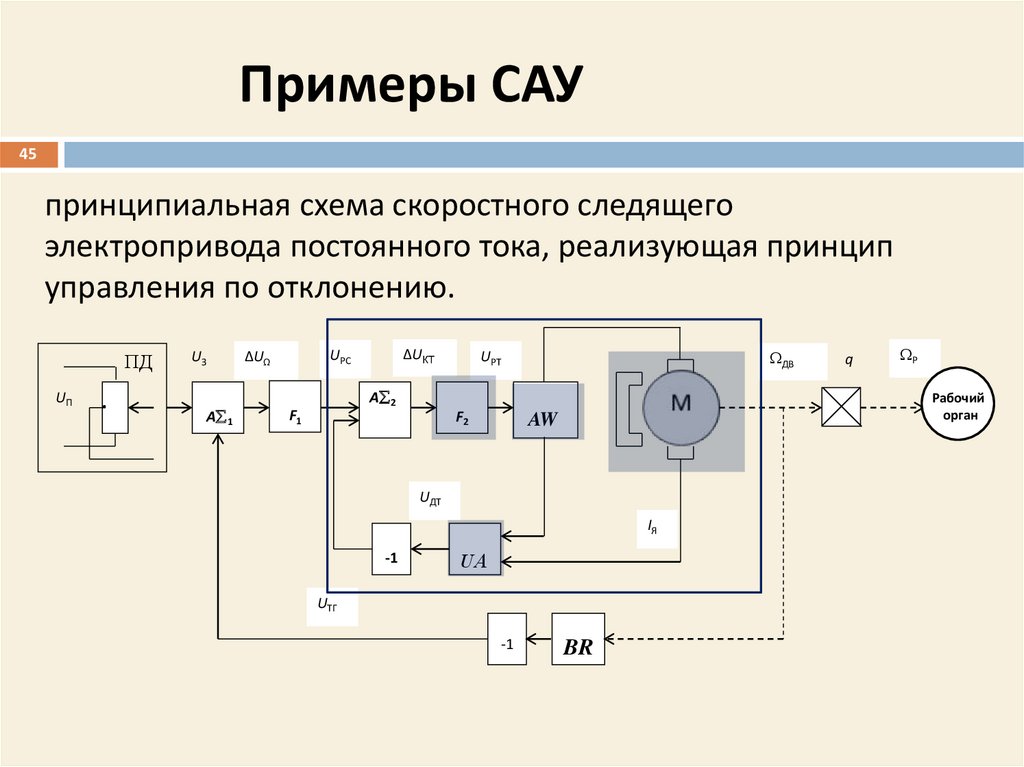
Примеры САУ45
принципиальная схема скоростного следящего
электропривода постоянного тока, реализующая принцип
управления по отклонению.
ПД
UЗ
ΔUКТ
UРС
ΔUΩ
UП
ДВ
UРТ
A 1
F2
AW
UДТ
IЯ
-1
UА
UТГ
-1
Р
Рубка
Рабочий
орган
A 2
F1
q
BR
46.
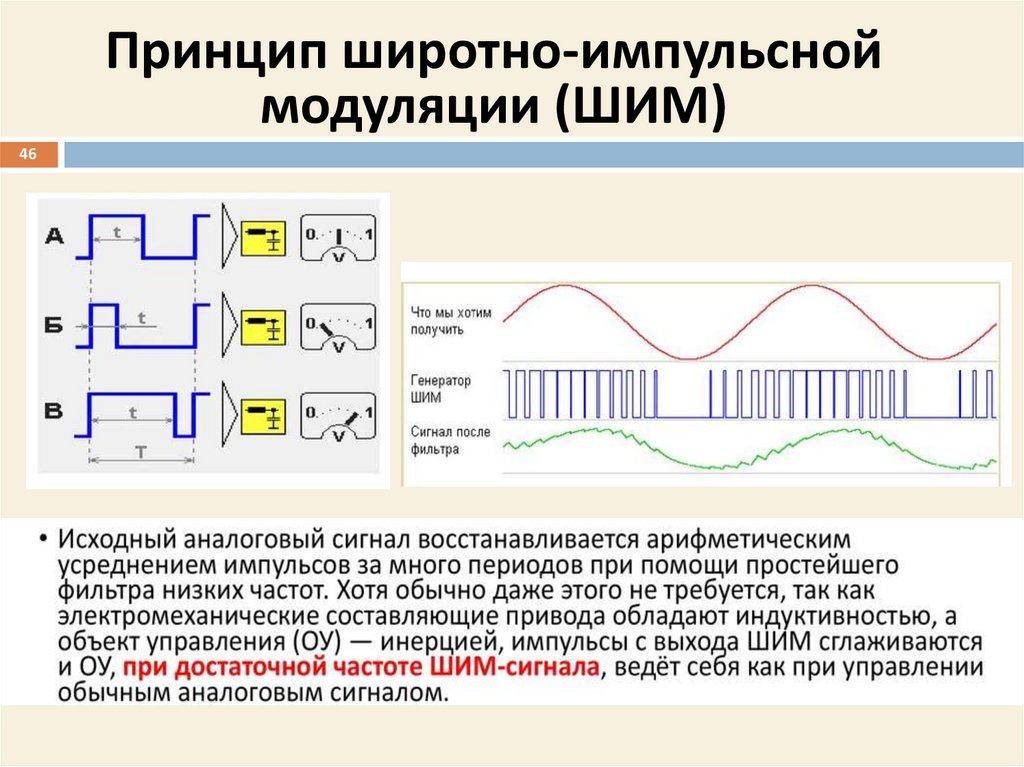
Принцип широтно-импульсноймодуляции (ШИМ)
46
47.
Классификация систем автоматическогоуправления
47
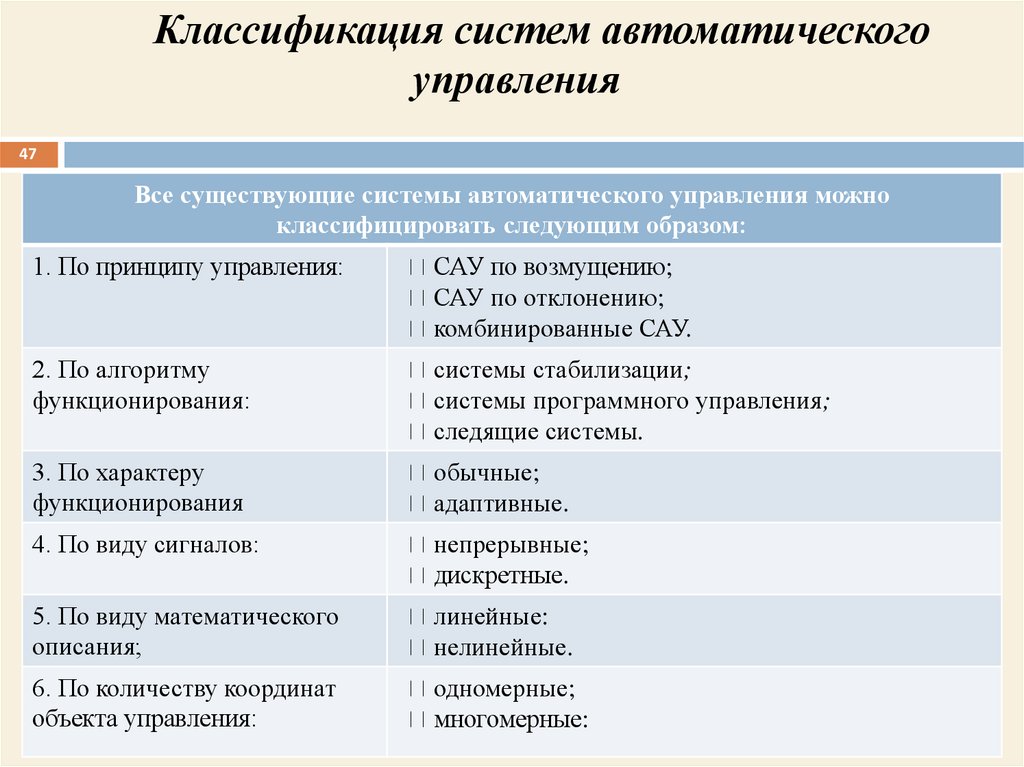
Все существующие системы автоматического управления можно
классифицировать следующим образом:
1. По принципу управления:
САУ по возмущению;
САУ по отклонению;
комбинированные САУ.
2. По алгоритму
функционирования:
системы стабилизации;
системы программного управления;
следящие системы.
3. По характеру
функционирования
обычные;
адаптивные.
4. По виду сигналов:
непрерывные;
дискретные.
5. По виду математического
описания;
линейные:
нелинейные.
6. По количеству координат
объекта управления:
одномерные;
многомерные:
48. Основные задачи ТАУ
48статика
x(t) =const
динамика
x(t) = Var
Анализ
в «малом»
Известна
структура, но не
параметры
в «большом»
Структура и
параметры
неизвестны
Синтез
49. Системы Автоматического Управления
49Системы Автоматического
Управления
Функциональная схема
50.
Линейные законы управления50
Пропорциональный закон управления описывается уравнением
u y K п u
Коэффициент Кп называется коэффициентом передачи регулятора, а сам регулятор –
П-регулятором. Очевидно, что увеличение сигнала рассогласования Δu ведёт к
увеличению управляющего сигнала uу и наоборот.
Это достаточно «простое» управление не учитывает инерционности элементов САУ
и управляющий сигнал будет запаздывать по отношению к изменению сигнала
рассогласования. Поэтому может оказаться, что сигнал рассогласования уменьшается, а
управляющий сигнал увеличивается, в результате чего переходный процесс становится всё
более колебательным, иногда вплоть до расходящегося процесса.
u y K и udt
51.
Линейные законы управления51
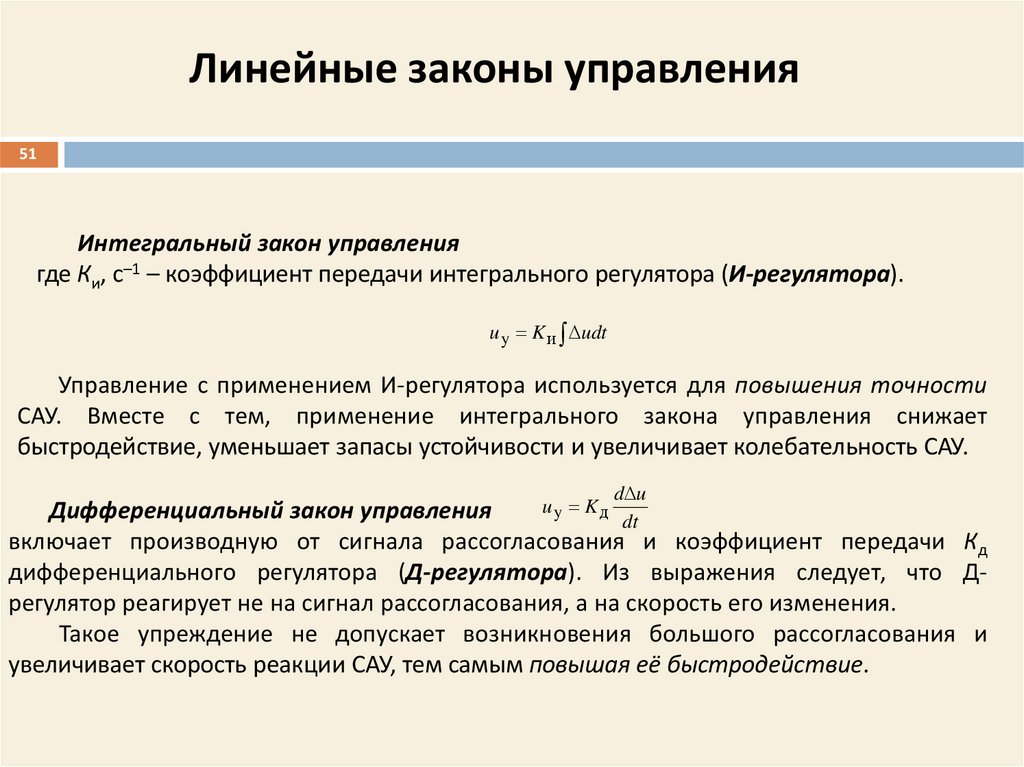
Интегральный закон управления
где Ки, с–1 – коэффициент передачи интегрального регулятора (И-регулятора).
u y K и udt
Управление с применением И-регулятора используется для повышения точности
САУ. Вместе с тем, применение интегрального закона управления снижает
быстродействие, уменьшает запасы устойчивости и увеличивает колебательность САУ.
uy Kд
d u
dt
Дифференциальный закон управления
включает производную от сигнала рассогласования и коэффициент передачи Кд
дифференциального регулятора (Д-регулятора). Из выражения следует, что Дрегулятор реагирует не на сигнал рассогласования, а на скорость его изменения.
Такое упреждение не допускает возникновения большого рассогласования и
увеличивает скорость реакции САУ, тем самым повышая её быстродействие.