")























 physics
physicsSimilar presentations:





")




Система сходящихся сил. Момент силы. Лекция 2
1. Новосибирский Государственный Архитектурно- Строительный Университет (Сибстрин)
Новосибирский Государственный АрхитектурноСтроительный Университет (Сибстрин)Лекция 2.
Система сходящихся сил.
Момент силы
Если на точку действует несколько сил,
то она получает от них то же движение,
как если бы на нее действовала одна сила,
эквивалентная им всем.
Леонард Эйлер
Кафедра теоретической механики
2.
Леонард Эйлер1707 (Базель) – 1727-1741 (Санкт-Петербург) –
1741-1766 (Берлин) – 1766-1783 (Санкт-Петербург)
2
3. На предыдущей лекции
• Статика – раздел теоретическоймеханики
• Основные задачи статики
• Модели в механике
• Статика – наука аксиоматичная
• Аксиомы статики
• Силы, связи и их реакции
3
4. Цель лекции
• Ре шение задач статики для тел , накоторые действует система сходящихся сил
• Ввести понятие момента силы
План лекции
2.1. Определение системы сходящихся сил (ССС)
2.2. Теорема о равнодействующей ССС
2.3. Условия равновесия
2.4. Решение задач статики
2.5. Момент силы
2.6. Заключение
4
5. 2.1. Определение ССС
6. 2.1.1. ССС
2.1.1. Система Сходящихся СилСистема сил, линии действия которых пересекаются
в одной точке, называется системой сходящихся сил
(ССС)
F1
F2
С 2.1.1. ССС
FN
2.1. ОПРЕДЕЛЕНИЕ ССС
F3
5
7. 2.1.2. Примеры
ССССистема сил, линии действия которой пересекаются
в одной точке, называются системой сходящихся сил
(ССС)
F1
С
F2
2.1.2. Примеры
FN
2.1. ОПРЕДЕЛЕНИЕ ССС
F3
6
8. 2.2. Теорема о равнодействующей ССС
9. Однажды Лебедь, Рак, да Щука Везти с поклажей воз взялись, И вместе трое все в него впряглись; Из кожи лезут вон, а возу все
нет ходу!Поклажа бы для них казалась и легка:
Да Лебедь рвется в облака,
Рак пятится назад,
а Щука тянет в воду.
Кто виноват из них,
кто прав, - судить не нам.
Да только воз и ныне там.
Fлебедь
Fщука
Fрак
При каких условиях воз сдвинулся бы?
2.1. ОПРЕДЕЛЕНИЕ ССС
7
10.
2.2.1. Теорема о Равнодействующей ССССистема сходящихся сил имеет равнодействующую,
равную геометрической сумме этих сил и проходящую
F1
через точку пересечения их линий действия
F1
R12 F2
Доказательство
• Перенесем силы в точку
пересечения линий действия
• Складывая затем силы попарно
по правилу параллелограмма
R12 F1 F2 ,
FN
R 123 R 12 F3 F1 F2 F3 ,
……..
С
N
R Fi
R123
F3
R
Теорема доказана
i 1
2.2. УСЛОВИЯ
ТЕОРЕМА РАВНОВЕСИЯ
О РАВНОДЕЙСТВУЮШЕЙ ССС
2.2.
8
11.
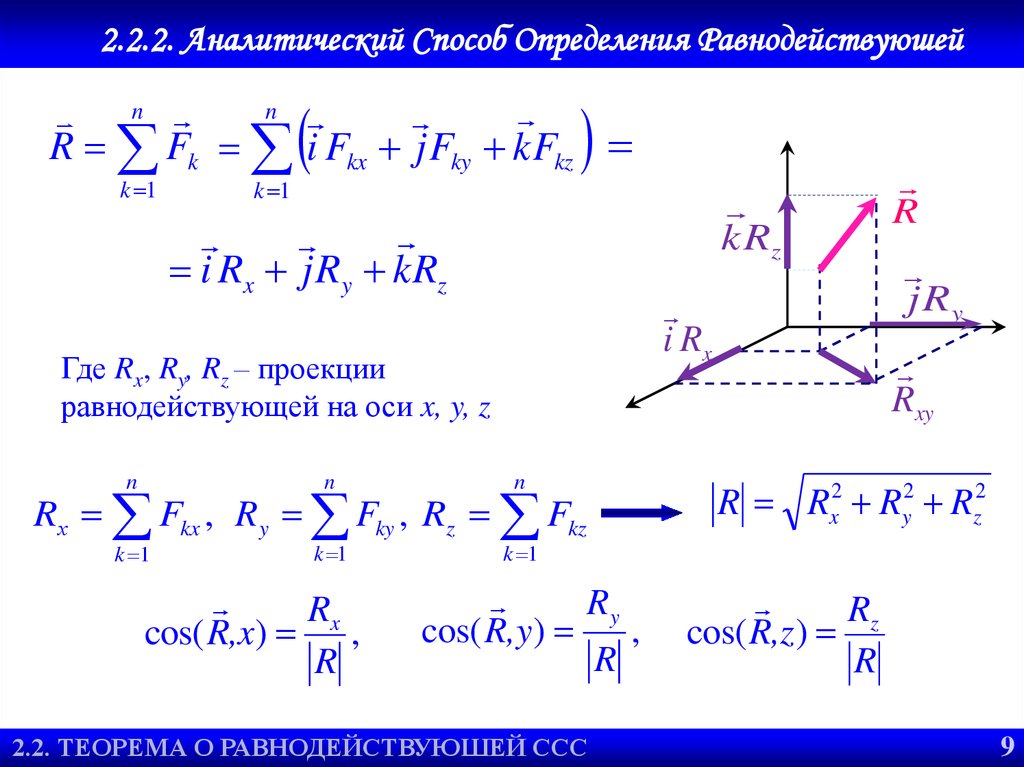
2.2.2. Аналитический Способ Определения Равнодействуюшейn
n
R Fk i Fkx j Fky k Fkz
k 1
k 1
k Rz
i Rx j Ry k Rz
i Rx
Где Rx, Ry, Rz – проекции
равнодействующей на оси x, y, z
n
n
n
k 1
k 1
k 1
Rх Fkx , R y Fky , Rz Fkz
Rx
cos( R,x) ,
R
Ry
cos( R,y )
,
R
2.2.УСЛОВИЯ
ТЕОРЕМА
О РАВНОДЕЙСТВУЮШЕЙ ССС
2.2.
2.2.
РАВНОВЕСИЯ
R
j Ry
Rxy
R Rx2 Ry2 Rz2
Rz
cos( R,z )
R
9
12.
2.2.3. Графический Способ Определения Равнодействующей• Равнодействующая может быть найдена
геометрически
• Она является замыкающей стороной силового
многоугольника, построенного на данных силах
N
R Fi
i 1
F1
F2
FN
R
F3
F4
2.2.УСЛОВИЯ
ТЕОРЕМА
О РАВНОДЕЙСТВУЮШЕЙ ССС
2.2.
РАВНОВЕСИЯ
10
13. 2.3. Условия равновесия
14.
2.3.1. Условия Равновесия СССДействие на тело произвольной ССС эквивалентно
действию одной силы, равнодействующей
N
{F1 , F2 , , F1} ~ R Fi
i 1
Но если тело находится в равновесии под действием
одной силы, то эта сила равна нулю
N
R Fi 0
i 1
Геометрически это условие означает
замкнутость
силового многоугольника сил {F , F , , F }
1
2.3. УСЛОВИЯ
УСЛОВИЯ РАВНОВЕСИЯ
РАВНОВЕСИЯ
2.2.
2
1
11
15.
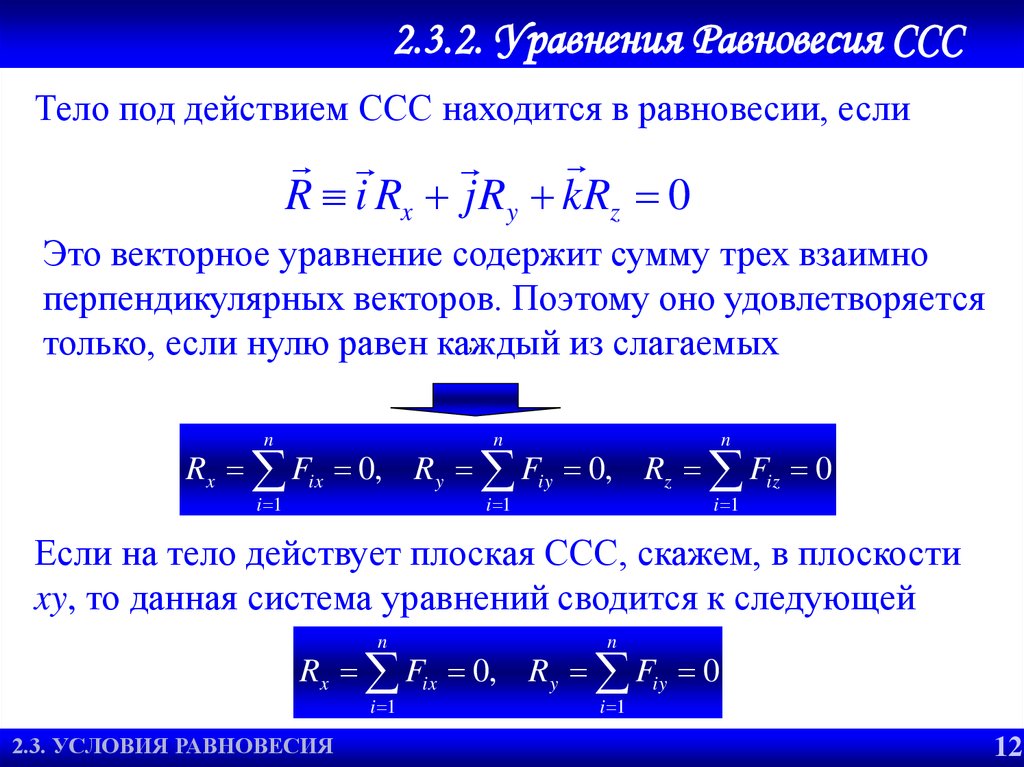
2.3.2. Уравнения Равновесия СССТело под действием ССС находится в равновесии, если
R i Rx j Ry k Rz 0
Это векторное уравнение содержит сумму трех взаимно
перпендикулярных векторов. Поэтому оно удовлетворяется
,
только, если нулю равен каждый
из слагаемых
n
n
n
i 1
i 1
i 1
Rx Fix 0, Ry Fiy 0, Rz Fiz 0
Если на тело действует плоская ССС, скажем, в плоскости
xy, то данная система уравнений сводится к следующей
n
n
i 1
i 1
Rx Fix 0, Ry Fiy 0
2.3. УСЛОВИЯ
УСЛОВИЯ РАВНОВЕСИЯ
РАВНОВЕСИЯ
2.2.
2.3.
УРАВНЕНИЯ
РАВНОВЕСИЯ
12
16.
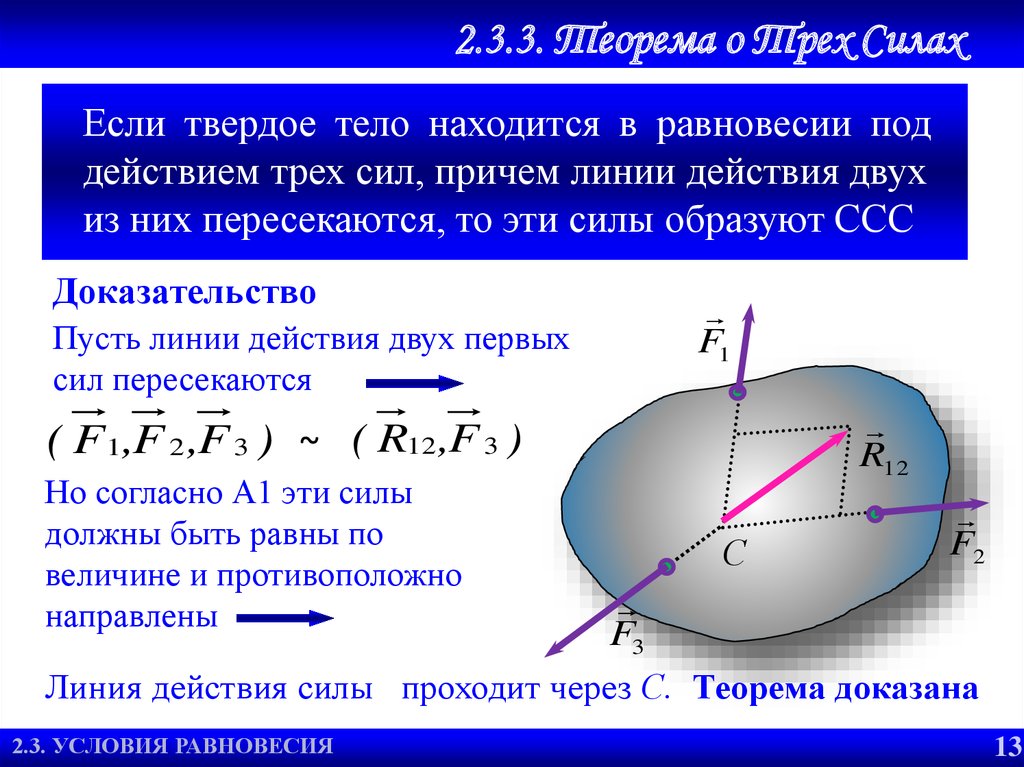
2.3.3. Теорема о Трех СилахЕсли твердое тело находится в равновесии под
действием трех сил, причем линии действия двух
из них пересекаются, то эти силы образуют ССС
Доказательство
Пусть линии действия двух первых
сил пересекаются
F1
R12
( F 1,F 2 ,F 3 ) ~ ( R12 ,F 3 )
Но согласно А1 эти силы
должны быть равны по
величине и противоположно
направлены
С
F2
F3
Линия действия силы проходит через С. Теорема доказана
2.3. УСЛОВИЯ
УСЛОВИЯ
РАВНОВЕСИЯ
2.4.
ТЕОРЕМА РАВНОВЕСИЯ
О
ТРЕХ СИЛАХ
2.2.
13
17. 2.4. Решение задач статики
18.
2.4.1. Алгоритм Решения Задач Статики1. Установить, исследование равновесия какого тела
(точки, системы тел) следует рассмотреть
2. Освободить тело от связей и изобразить действующие
на него активные силы и силы реакций отброшенных
связей
3. Установить, какая система сил действует на тело, и
сформулировать условия равновесия этой системы
4. Составить уравнения равновесия
5. Решить уравнения равновесия и определить искомые
неизвестные
Замечание
Если число неизвестных не превышает числа уравнений
равновесия, то система называется статически определенной,
в противном случае – статически неопределенной
2.4. РЕШЕНИЯ
РЕШЕНИЕРАВНОВЕСИЯ
ЗАДАЧ СТАТИКИ
СТАТИКИ
2.5.
ЗАДАЧ
2.2.
УСЛОВИЯ
14
19. 2.4.2. Задача 2.1. Графическое решение
2.4.2. Задача 2.1. Графическое РешениеF
Груз весом P (точка) лежит на наклонной
плоскости, образующей угол α с горизонтом.
Определить силу давления груза на плоскость и
α
величину силы F, которую нужно приложить
параллельно плоскости, чтобы удержать груз в
Р
равновесии.
Решение
F
N
• Освобождаемся от связей и рисуем все
силы, под действием которых груз (точка)
находится в равновесии
Р
• Геометрическое
решение
задачи
F
Р α
N
F P sin , N P cos
4.2.
Задача
2.1.
Графическое
решение
2.4.
РЕШЕНИЕ
ЗАДАЧ
СТАТИКИ
2.5.
РЕШЕНИЯ
ЗАДАЧ
СТАТИКИ
2.2. УСЛОВИЯ РАВНОВЕСИЯ
15
20.
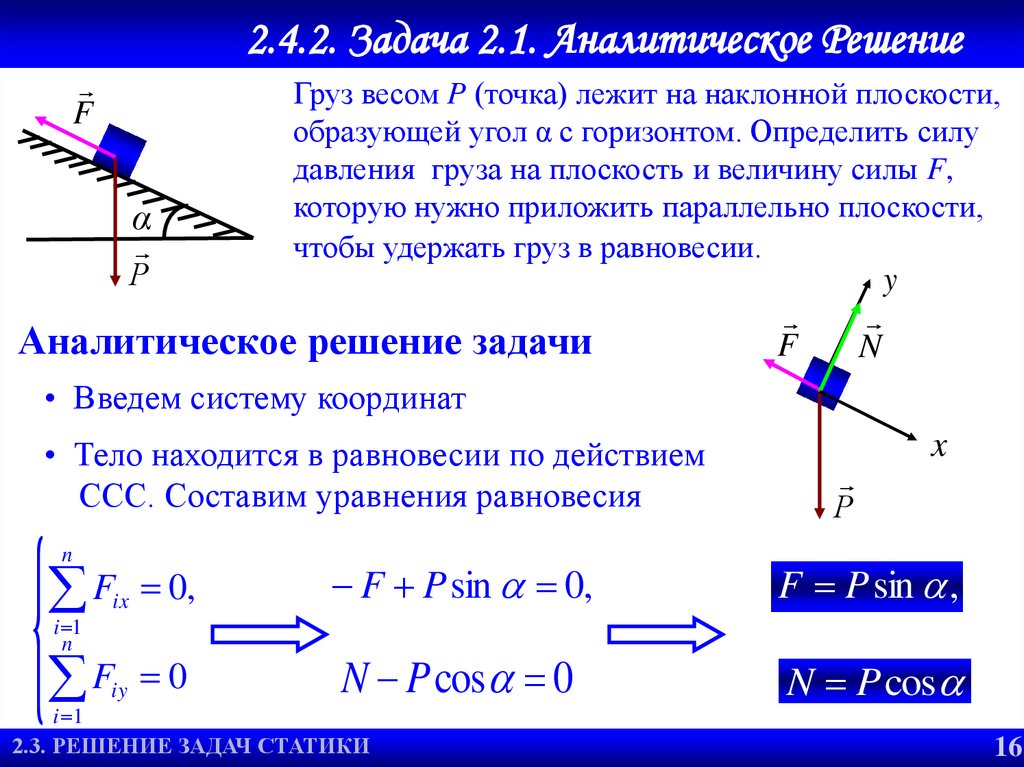
2.4.2. Задача 2.1. Аналитическое РешениеF
α
Р
Груз весом P (точка) лежит на наклонной плоскости,
образующей угол α с горизонтом. Определить силу
давления груза на плоскость и величину силы F,
которую нужно приложить параллельно плоскости,
чтобы удержать груз в равновесии.
y
Аналитическое решение задачи
N
F
• Введем систему координат
• Тело находится в равновесии по действием
ССС. Составим уравнения равновесия
n
Р
x
F
0,
F P sin 0,
F P sin ,
F
0
N P cos 0
N P cos
i 1
n
i 1
ix
iy
2.3. РЕШЕНИЯ
РЕШЕНИЕРАВНОВЕСИЯ
ЗАДАЧ СТАТИКИ
СТАТИКИ
2.5.
ЗАДАЧ
2.2.
УСЛОВИЯ
16
21. 2.5. Момент силы
22. 2.5.1. Мотивация
КакПодпод
действием
действием
силы
силы
незакрепленное
движется
тело
шарнирно
движется закрепленное
вдоль линии ее
тело?
действия
F
F
?
F
?
Важнейшим понятием механики наряду с силой
является момент силы, отражающее тот опытный
факт, что шарнирно закрепленное тело под
действием силы вращается
1.4.
МОМЕНТ СИЛЫ
2.5. УСЛОВИЯ
МОМЕНТ
СИЛЫ
2.2.
РАВНОВЕСИЯ
17
22
23. 2.5.2. Момент Силы Относительно Точки
FMo
h
O
r
Моментом силы F относительно точки
О называется вектор M (F ) , равный
o
b
A
векторному
произведению радиусвектора r
силы и
точки
приложения
силы: M ( F ) r F
o
Момент силы направлен
перпендикулярно плоскости
векторов r и F и в ту сторону, откуда вращение тела
происходит против часовой стрелки
| M o ( F ) | | r || F | sin b
h | r | sin b
| M o ( F ) | Fh
Плечо силы h – это кратчайшее расстояние от точки относительно которой вычисляется момент до линии ее действия
2.5. УСЛОВИЯ
МОМЕНТ СИЛЫ
2.2.
РАВНОВЕСИЯ
18
24. 2.5.3. Момент Силы Относительно Точки
M o (F ) r Fi j k
M O ( F ) x y z ( yFz zFy )i ( zFx xFz ) j ( xFy yFx )k
Fx Fy Fz
где x, y, z – координаты точки приложения силы, а Fx , Fy , Fz–
проекции силы на оси координат
M o ( F ) i M ox j M oy k M oz
M Ox ( F ) yFz zFy , M Oy zFx xFz , M Oz ( F ) xFy yFx
1.4.
МОМЕНТ СИЛЫ
2.5. УСЛОВИЯ
МОМЕНТ
СИЛЫ
2.2.
РАВНОВЕСИЯ
19
18
25. 2.5.4. Модуль момента силы
M O ( F ) Fh ( yFz zFy ) 2 ( zFx xFz ) 2 ( xFy yFx ) 2Замечание
O
A
• Если точка О лежит на линии действия
силы, то момент силы относительно
этой точки равен нулю
• Тело, закрепленное шарнирно в точке
О, не будет вращаться под действием
силы, линия действия которой
проходит через эту точку
1.4.
МОМЕНТ СИЛЫ
2.5. УСЛОВИЯ
МОМЕНТ
СИЛЫ
2.2.
РАВНОВЕСИЯ
20
19
26. 2.5.5. Момент силы на плоскости
M o (F ) r FY
F
y
Fx
O
Fy
r
A
X
x
M O (F )
Z
i j k
M O ( F ) x y 0 ( xFy yFx )k Fhk
Fx Fy 0
F OXY
M O ( F ) || k
• Вектор момента силы имеет одну
составляющую и направлен перпендикулярно плоскости, в которой лежит
сила и центр
mO ( F ) M O ( F ) F h
• Алгебраический момент силы mO (F ) имеет знак плюс, если
под действием силы тело поворачивается против часовой
стрелки, и минус – в противном случае
2.5. УСЛОВИЯ
МОМЕНТ
СИЛЫ
2.2.
РАВНОВЕСИЯ
1.4.
МОМЕНТ СИЛЫ
21
20
27.
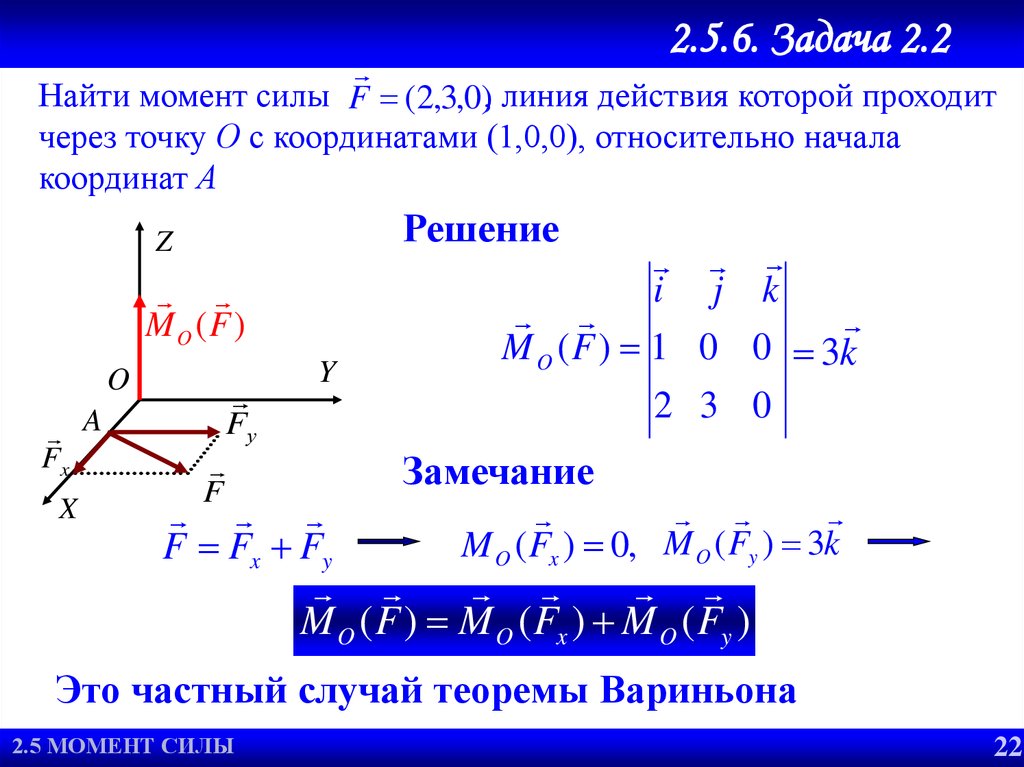
2.5.6. Задача 2.2Найти момент силы F (2,3,0), линия действия которой проходит
через точку О с координатами (1,0,0), относительно начала
координат А
Решение
Z
M O (F )
O
A
Fx
X
Fу
Y
i j k
M O ( F ) 1 0 0 3k
2 3 0
Замечание
F
F Fx Fy
M O ( Fx ) 0, M O ( Fy ) 3k
M O ( F ) M O ( Fx ) M O ( Fy )
Это частный случай теоремы Вариньона
2.5 МОМЕНТ
СИЛЫ
2.2.
УСЛОВИЯ
РАВНОВЕСИЯ
1.4.
МОМЕНТ СИЛЫ
22
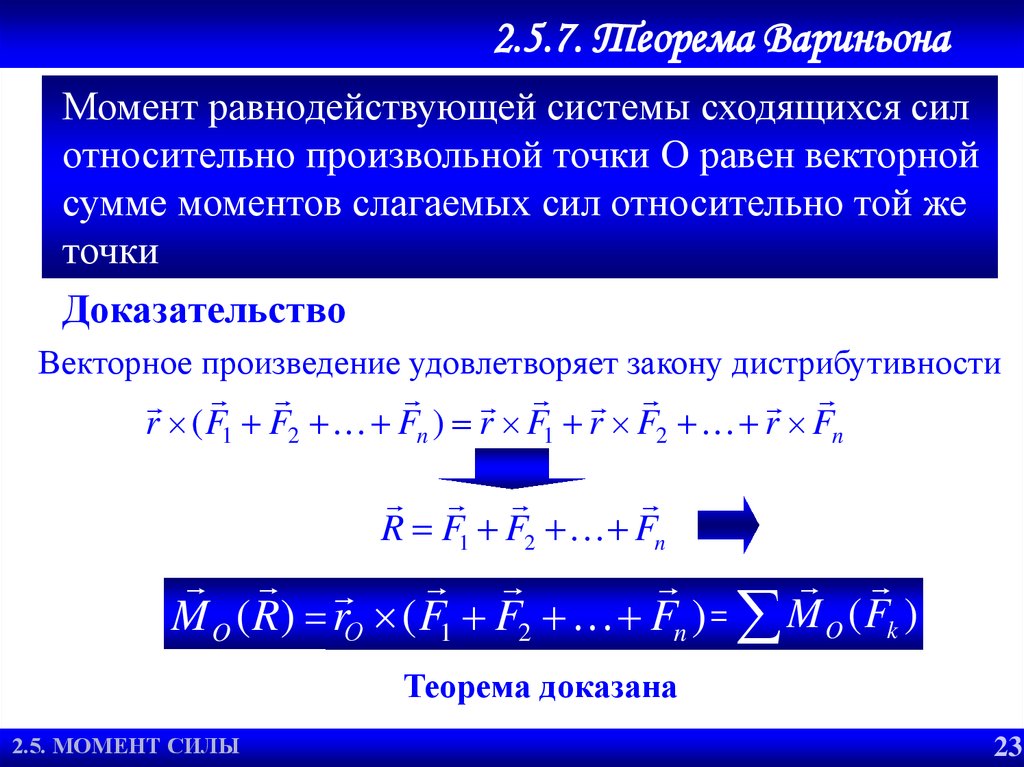
28.
2.5.7. Теорема ВариньонаМомент равнодействующей системы сходящихся сил
относительно произвольной точки O равен векторной
сумме моментов слагаемых сил относительно той же
точки
Доказательство
Векторное произведение удовлетворяет закону дистрибутивности
r ( F1 F2 Fn ) r F1 r F2 r Fn
R F1 F2 Fn
M O (R) rО ( F1 F2 Fn ) M O ( Fk )
Теорема доказана
2.5. УСЛОВИЯ
МОМЕНТ
СИЛЫ
2.2.
РАВНОВЕСИЯ
1.4.
МОМЕНТ СИЛЫ
23
29.
Pierre Varignon (1654-1722, Paris)24
30.
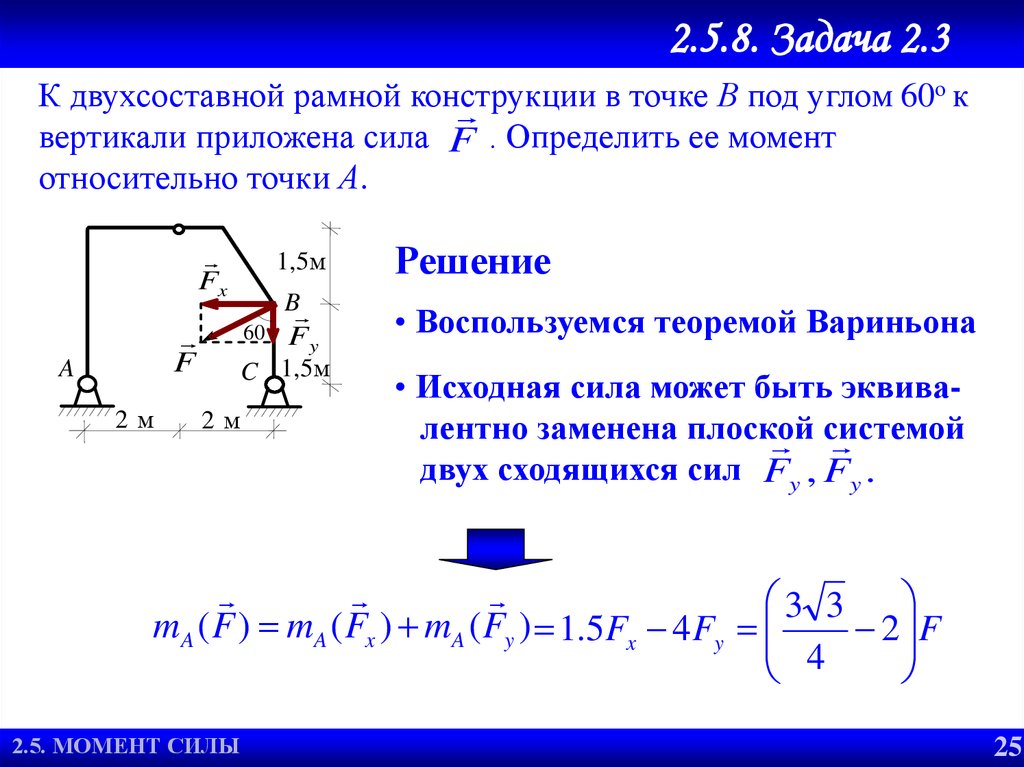
2.5.8. Задача 2.3ок
К двухсоставной рамной конструкции
в
точке
В
под
углом
60
вертикали приложена сила F . Определить ее момент
относительно точки А.
Fx
F
A
2м
1,5м
60
B
Fy
C 1,5м
2м
Решение
• Воспользуемся теоремой Вариньона
• Исходная сила может быть эквивалентно заменена плоской
системой
двух сходящихся сил Fy , Fy .
3 3
F
mA ( F ) mA ( Fx ) mA ( Fy ) 1.5Fx 4 Fy
2
4
2.5. УСЛОВИЯ
МОМЕНТ СИЛЫ
2.2.
РАВНОВЕСИЯ
25
31.
F2.5.9. Момент Силы Относительно Оси
• Тело под действием данной
силы будет вращаться
относительно оси Oz
z
F
( xy )
O
h F xy
Fz
A
• Это вращение характеризуется скалярной величиной,
называемой моментом силы
относительно оси Oz
• За вращательное движение
отвечает сила Fxy
Моментом силы F относительно оси OZ называется скалярная
величина, равная алгебраическому моменту проекции этой
силы на плоскость, перпендикулярную оси относительно точки
пересечения данной оси с этой плоскостью
M z ( F ) M z ( Fxy ) Fxy h
2.5. УСЛОВИЯ
МОМЕНТ СИЛЫ
2.2.
РАВНОВЕСИЯ
26
32.
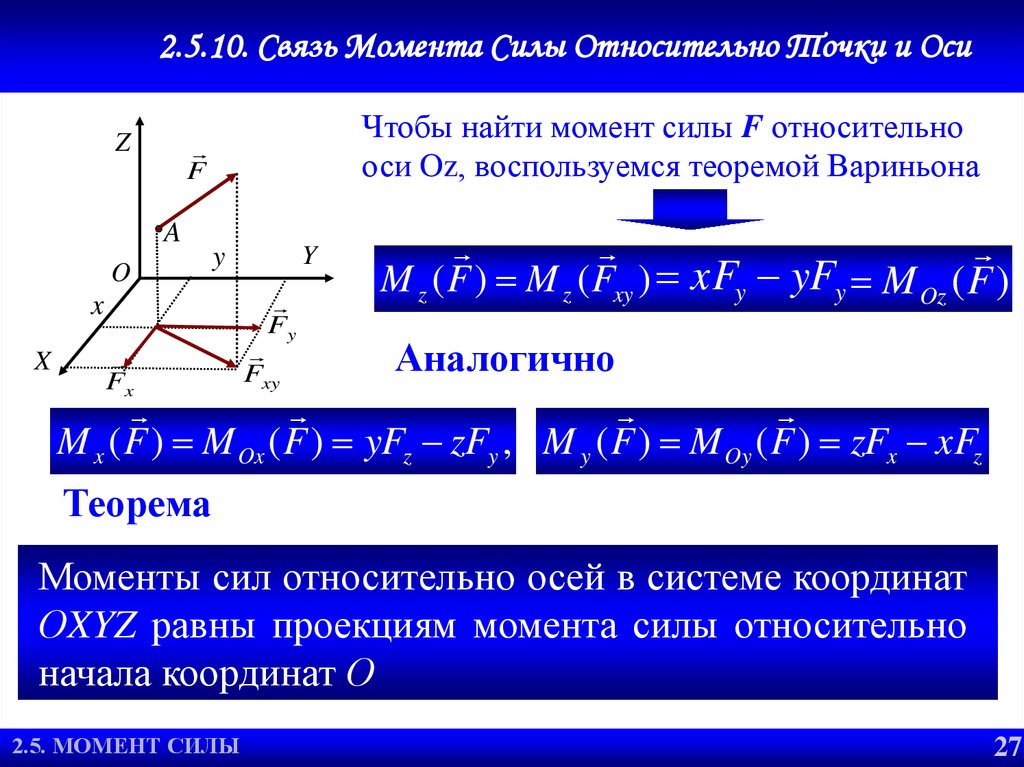
2.5.10. Связь Момента Силы Относительно Точки и ОсиZ
A
O
Y
y
Fy
x
X
Чтобы найти момент силы F относительно
оси Oz, воспользуемся теоремой Вариньона
F
Fx
Fxy
M z ( F ) M z ( Fxy ) xFy yFy M Oz (F )
Аналогично
M x ( F ) M Ox ( F ) yFz zFy , M y ( F ) M Oy ( F ) zFx xFz
Теорема
Моменты сил относительно осей в системе координат
ОXYZ равны проекциям момента силы относительно
начала координат О
2.5. УСЛОВИЯ
МОМЕНТ
СИЛЫ
2.2.
РАВНОВЕСИЯ
1.4.
МОМЕНТ СИЛЫ
27
24
33.
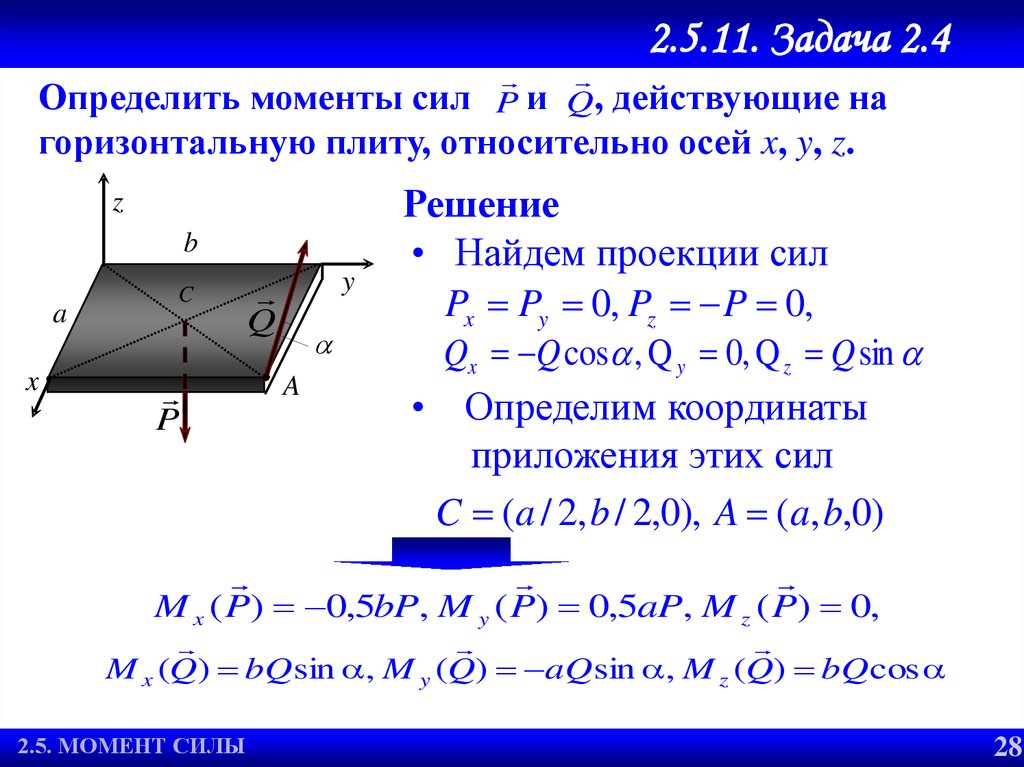
P и Q,2.5.11. Задача 2.4
Определить моменты сил
действующие на
горизонтальную плиту, относительно осей x, y, z.
z
b
a
x
C
P
y
Q
A
Решение
• Найдем проекции сил
Px Py 0, Pz P 0,
Qx Q cos , Q y 0, Q z Q sin
• Определим координаты
приложения этих сил
C (a / 2, b / 2,0), A (a, b,0)
M x ( P) 0,5bP, M y ( P) 0,5aP, M z ( P) 0,
M x (Q) bQsin , M y (Q) aQsin , M z (Q) bQ cos
2.5.УСЛОВИЯ
МОМЕНТСИЛЫ
СИЛЫ
2.2.
РАВНОВЕСИЯ
1.4.
МОМЕНТ
28
25
34. 2.6. Заключение
35.
2.6.1. Основные Выводы. I• ССС эквивалентна действию одной
силы – равнодействующей. В состоянии
равновесия эта равнодействующая
равна нулю
• Все задачи статики имеют достаточно
простой алгоритм решения
• В статике решаются только
статически определимые задачи
2.6.ОСНОВНЫЕ
ЗАКЛЮЧЕНИЕ
ЗАКЛЮЧЕНИЕ
1.2.
ПОНЯТИЯ И МОДЕЛИ
29
36.
2.6.2. Основные Выводы. II• Введен момент силы относительно
центра и оси
• Установлена связь момента силы
относительно оси и относительно центра
• Для плоской системы сил можно
использовать алгебраическое
определение момента силы
2.6.ОСНОВНЫЕ
ЗАКЛЮЧЕНИЕ
ЗАКЛЮЧЕНИЕ
1.2.
ПОНЯТИЯ И МОДЕЛИ
30
37.
2.6.3. Тема Следующей ЛекцииСИСТЕМА
ПАРАЛЛЕЛЬНЫХ СИЛ
И ТЕОРИЯ ПАР СИЛ
1.3.
СТАТИКИ
2.6.АКСИОМЫ
ЗАКЛЮЧЕНИЕ
1.2.
ОСНОВНЫЕ
ПОНЯТИЯ И МОДЕЛИ
31
38.
Тема следующей лекцииЗАКЛЮЧЕНИЕ
2.6.ОСНОВНЫЕ
ЗАКЛЮЧЕНИЕ
1.2.
ПОНЯТИЯ И МОДЕЛИ
38
29