





 physics
physicsSimilar presentations:










Динамика твердого тела. Уравнения движения твердого тела
1.
Динамика твердого телаУравнения движения твердого тела
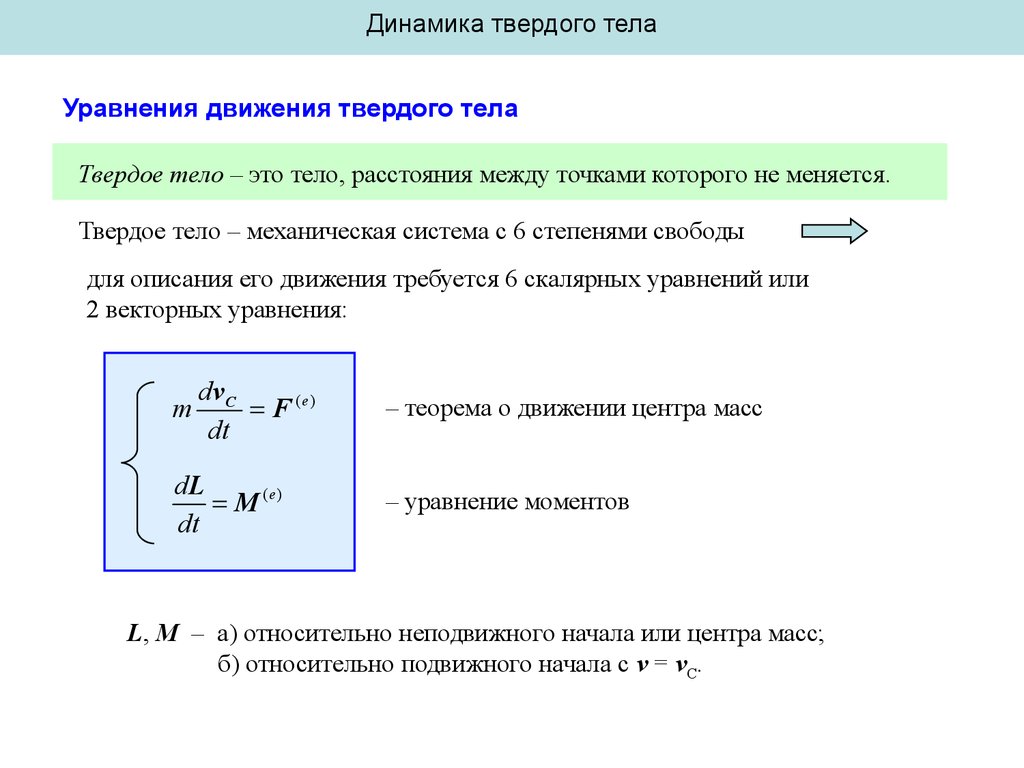
Твердое тело – это тело, расстояния между точками которого не меняется.
Твердое тело – механическая система с 6 степенями свободы
для описания его движения требуется 6 скалярных уравнений или
2 векторных уравнения:
m
dv C
F (e )
dt
dL
M (e)
dt
– теорема о движении центра масс
– уравнение моментов
L, M – а) относительно неподвижного начала или центра масс;
б) относительно подвижного начала с v = vC.
2.
Динамика твердого телаРавновесие твердого тела
Условия равновесия:
M(e) = 0 относительно любого начала
F (e) 0
M (e) 0
Равновесие балки
центр масс
N1
N2
N1 N 2 mg 0
N1 x1 N 2 x2 0
O
1
2
x1
x2
mg
N1
x2
mg
x1 x2
N2
x1
mg
x1 x2
3.
Динамика твердого телаУравнение моментов относительно неподвижной оси
z – неподвижная ось
(ось моментов)
Уравнение моментов
O
dL
M
dt
При проецировании на ось z
dLz
Mz
dt
– уравнение моментов относительно
неподвижной оси
В цилиндрической системе координат
Lz mv
M z F
4.
Динамика твердого телаУравнение моментов относительно неподвижной оси
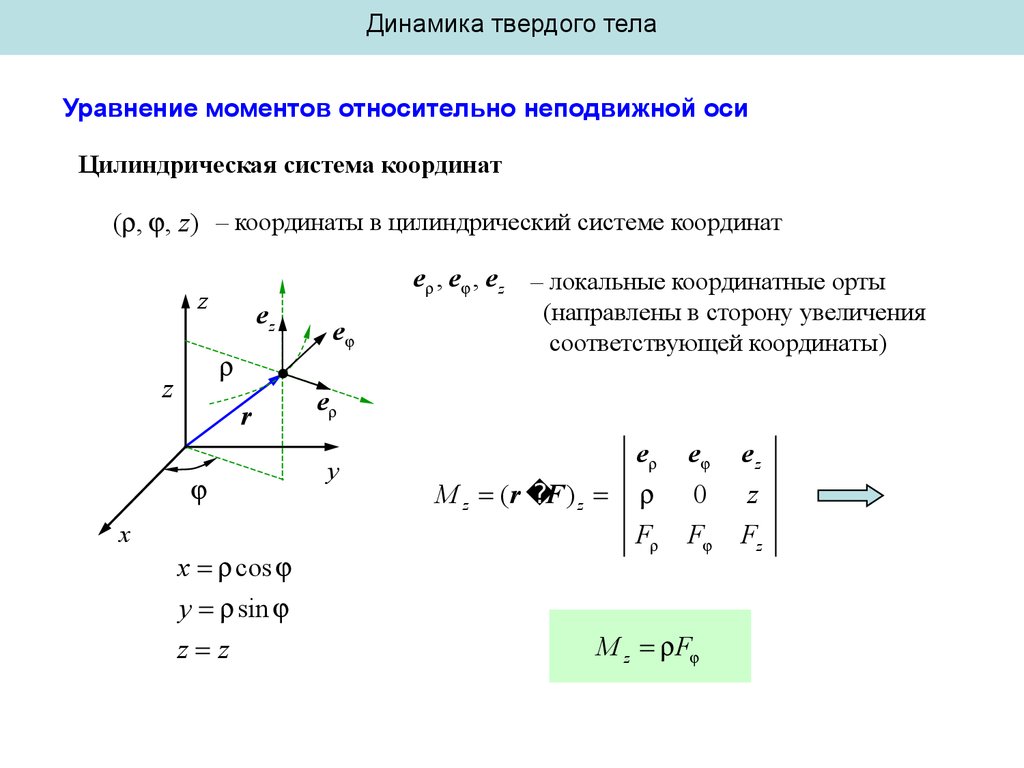
Цилиндрическая система координат
( , , z ) – координаты в цилиндрический системе координат
e , e , e z – локальные координатные орты
z
ez
z
r
x
x cos
y sin
z z
e
(направлены в сторону увеличения
соответствующей координаты)
e
y
M z ( r F ) z
e
e
ez
0
z
F
F
Fz
M z F
5.
Динамика твердого телаУравнение динамики вращательного движения
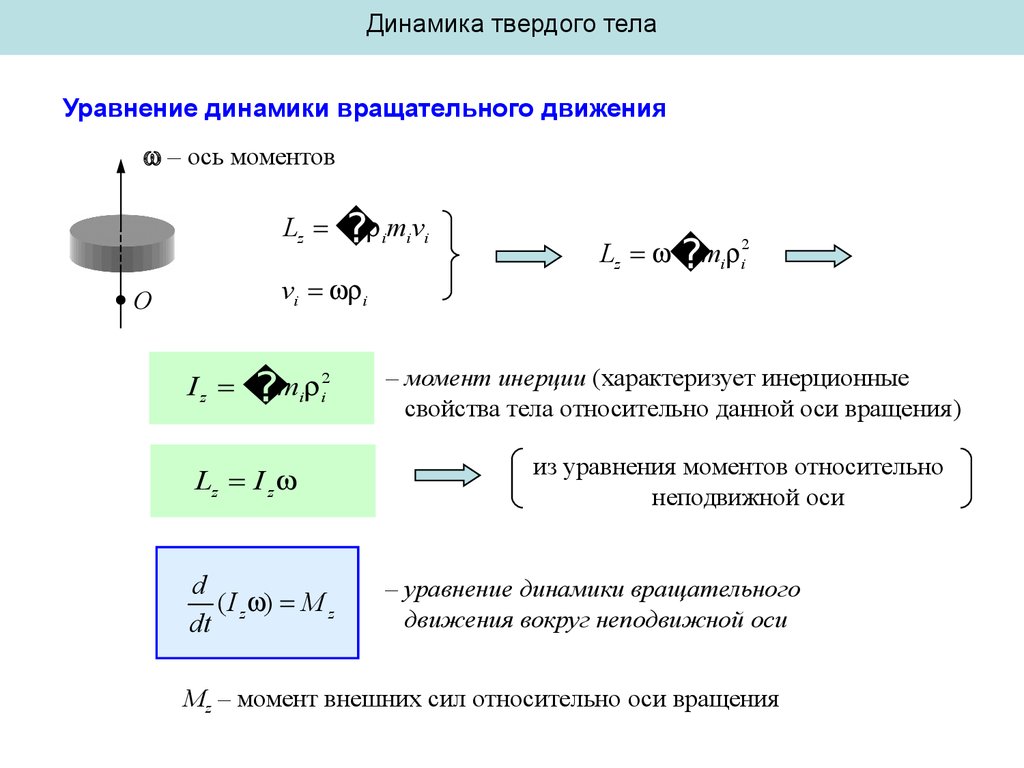
– ось моментов
Lz i mi vi
O
vi i
I z mi i2
Lz I z
d
( I z ) M z
dt
Lz mi i2
– момент инерции (характеризует инерционные
свойства тела относительно данной оси вращения)
из уравнения моментов относительно
неподвижной оси
– уравнение динамики вращательного
движения вокруг неподвижной оси
Mz – момент внешних сил относительно оси вращения
6.
Динамика твердого телаУравнение динамики вращательного движения
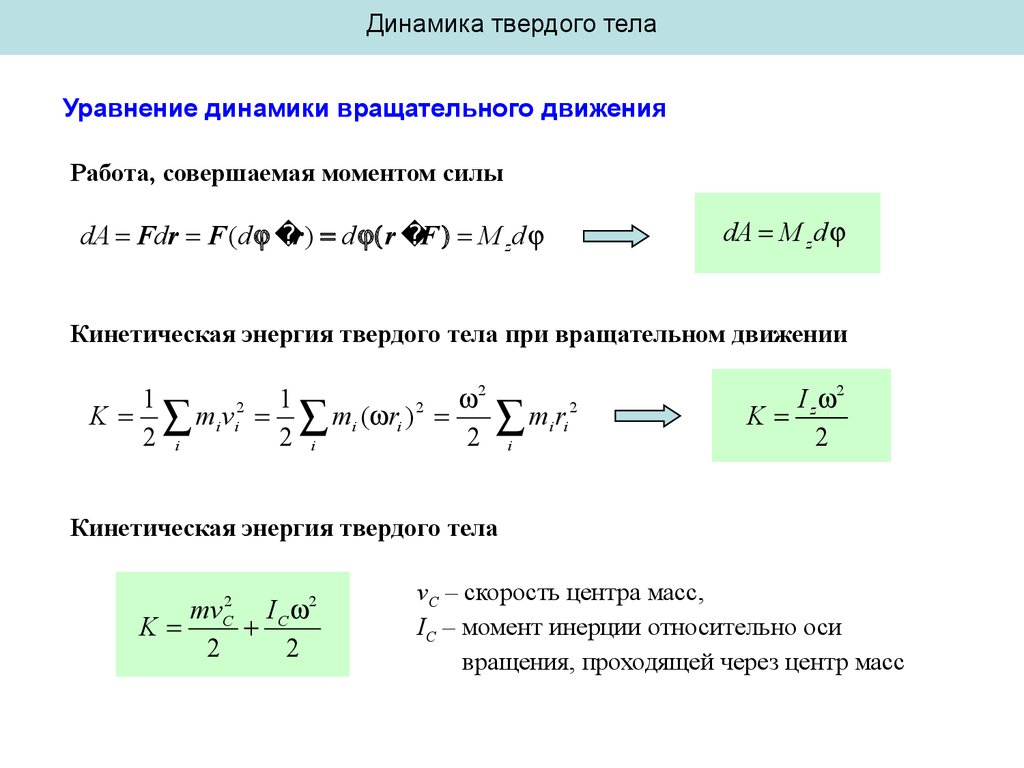
Работа, совершаемая моментом силы
dA M z d
dA Fdr F ( d r ) d r F M z d
Кинетическая энергия твердого тела при вращательном движении
1
1
2
2
2
K mi vi mi ( ri )
2 i
2 i
2
m r
i i
i
2
I z 2
K
2
Кинетическая энергия твердого тела
mvC2 I C 2
K
2
2
vC – скорость центра масс,
IC – момент инерции относительно оси
вращения, проходящей через центр масс
7.
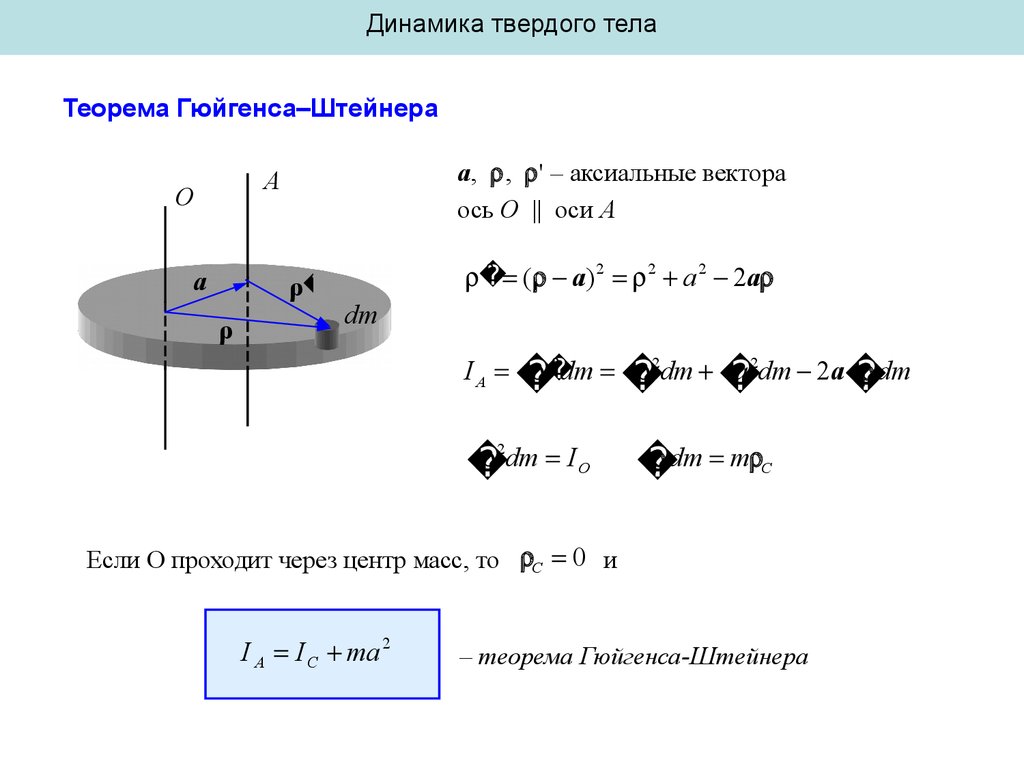
Динамика твердого телаТеорема Гюйгенса–Штейнера
a, , ' – аксиальные вектора
ось O || оси A
A
O
a
ρ
ρ
2
( a)2 2 a 2 2a
dm
2
IA
dm
2dm
a 2dm 2a
dm
2
dm IO
dm m
C
Если O проходит через центр масс, то C 0 и
I A I C ma 2
– теорема Гюйгенса-Штейнера
8.
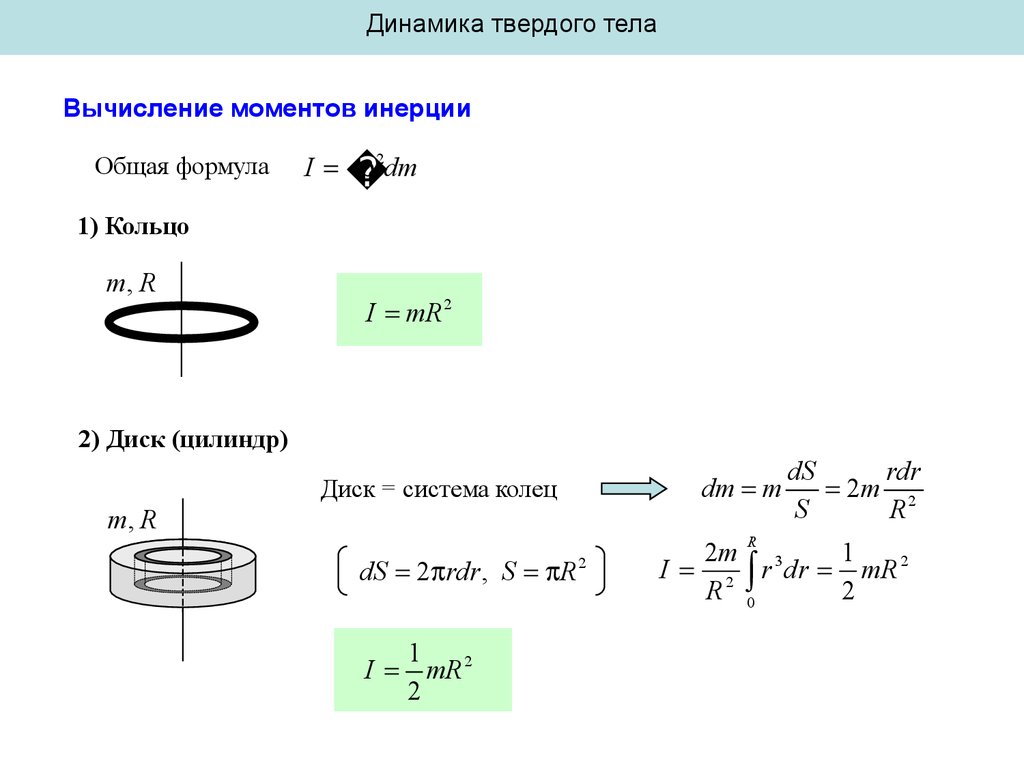
Динамика твердого телаВычисление моментов инерции
Общая формула
I
2dm
1) Кольцо
m, R
I mR 2
2) Диск (цилиндр)
dm m
Диск = система колец
m, R
R
dS 2 rdr, S R
I
1
mR 2
2
2
dS
rdr
2m 2
S
R
2m
1
I 2 r 3 dr mR 2
R 0
2
9.
Динамика твердого телаВычисление моментов инерции
3) Сфера
dm m
Сфера = система колец
dS 2 ( R sin )( Rd ) 2 R 2 sin d
m, R
S 4 R 2
d
r R sin
1
2
I
r dm mR 2
sin 3 d mR 2
2
3
0
2
I
2
mR 2
3
dS
S
10.
Динамика твердого телаВычисление моментов инерции
4) Шар
dm m
Шар = система сфер
m, R
dV
V
dV 4 r 2dr
V
4 3
R
3
R
2
2m 4
2
I
dI r 2dm 3
r dr mR 2
3
R 0
5
I
2
mR 2
5
11.
Динамика твердого телаВычисление моментов инерции
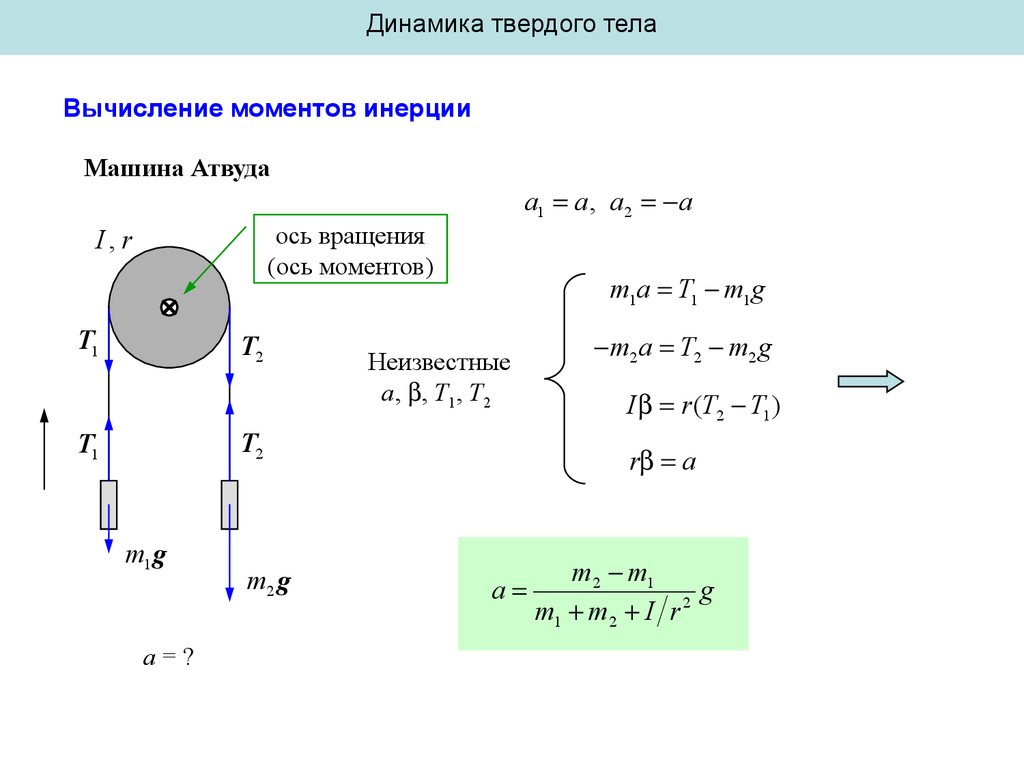
Машина Атвуда
a1 a , a2 a
ось вращения
(ось моментов)
I, r
T1
T2
m1a T1 m1 g
Неизвестные
a, , T1, T2
T2
T1
m1 g
a=?
m2 g
m2a T2 m2 g
I r (T2 T1 )
r a
a
m2 m1
g
m1 m2 I r 2
12.
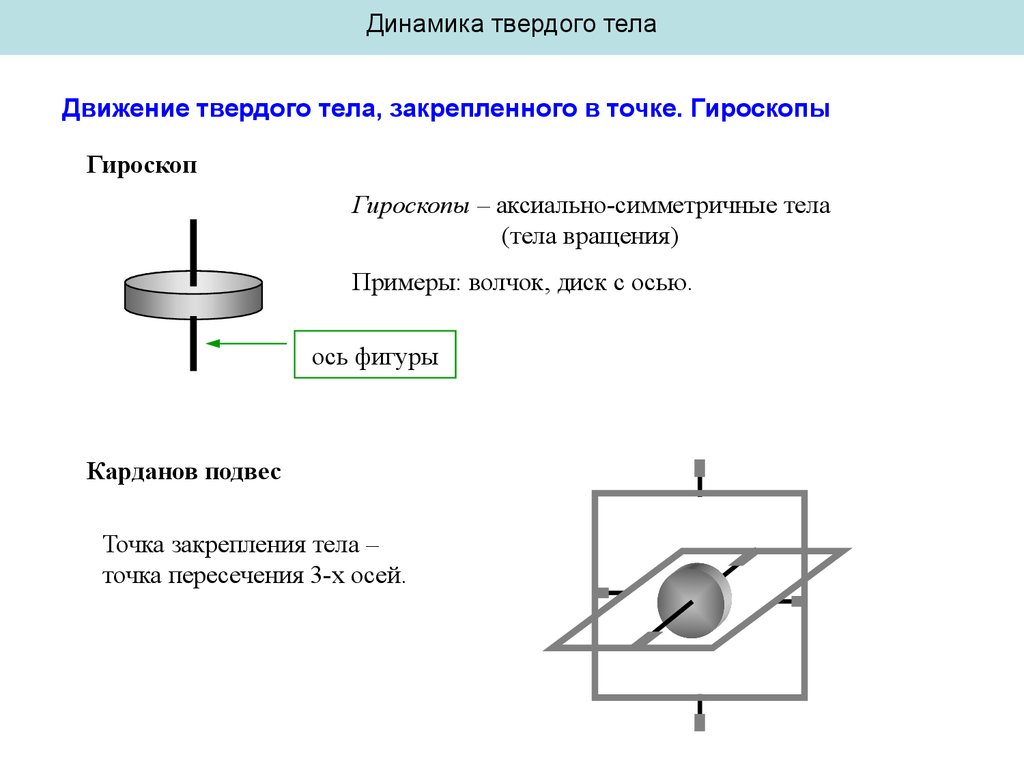
Динамика твердого телаДвижение твердого тела, закрепленного в точке. Гироскопы
Гироскоп
Гироскопы – аксиально-симметричные тела
(тела вращения)
Примеры: волчок, диск с осью.
ось фигуры
Карданов подвес
Точка закрепления тела –
точка пересечения 3-х осей.
13.
Динамика твердого телаДвижение твердого тела, закрепленного в точке. Гироскопы
Закрепленный гироскоп
Точка закрепления находится на оси гироскопа
и не совпадает с его центром масс.
L
Приближенная теория гироскопа
s
a
L I| | s
rC as
В поле тяжести движение гироскопа
называется вынужденной прецессией.
( вокруг оси >> самой оси )
L – момент импульса
rC – радиус–вектор центра масс
s – единичный вектор вдоль оси гироскопа
I|| – момент инерции относительно оси
14.
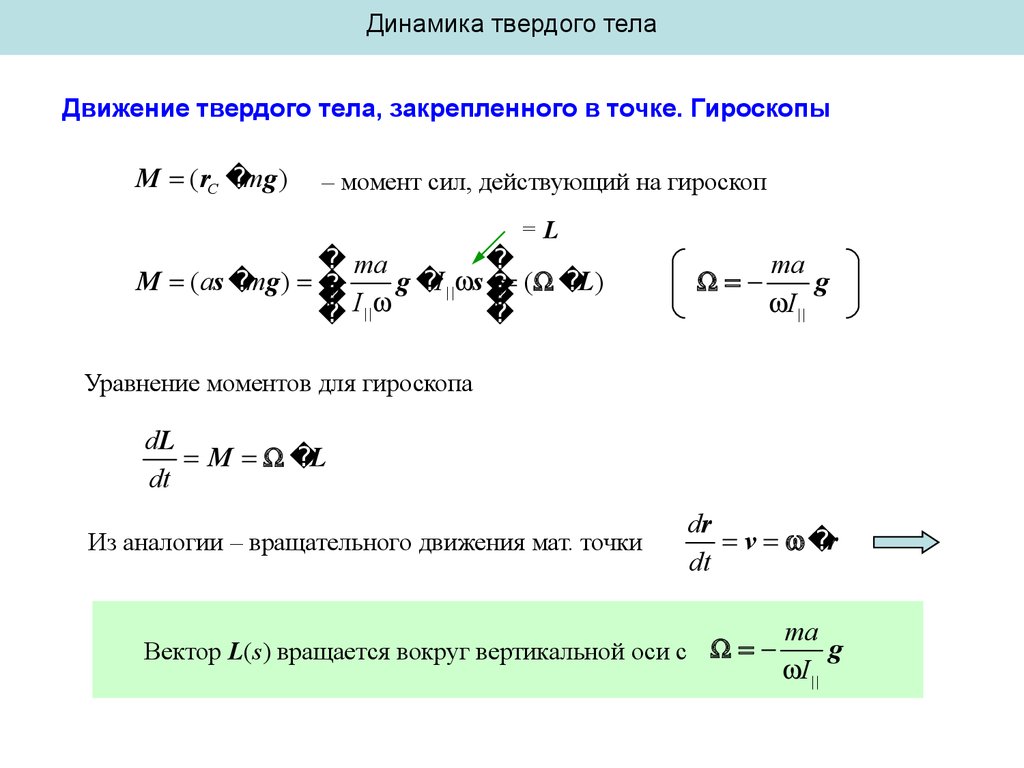
Динамика твердого телаДвижение твердого тела, закрепленного в точке. Гироскопы
M ( rC mg )
– момент сил, действующий на гироскоп
=L
ma
M (as mg )
g I | | s ( L)
I | |
ma
g
I | |
Уравнение моментов для гироскопа
dL
M L
dt
Из аналогии – вращательного движения мат. точки
dr
v r
dt
Вектор L(s) вращается вокруг вертикальной оси с
ma
g
I | |
15.
Динамика твердого телаДвижение твердого тела, закрепленного в точке. Гироскопы
0
s
0
s
Точная теория гироскопа: на прецессию оси гироскопа накладывается
дрожание самой оси – нутация.