
 physics
physicsSimilar presentations:




 движение точки")





Сложное движение точки
1.
КИНЕМАТИКАТема 2. Сложное движение точки
2. 2. Сложное движение точки
Понятие сложногодвижения.
Основные
определения
сложного движения
точки.
Понятие относительного
движения.
Понятие переносного
движения.
Понятие абсолютного
движение.
Кинематические
характеристики
точки при ее
сложном движении.
Определение скорости.
Определение ускорения
точки.
3.
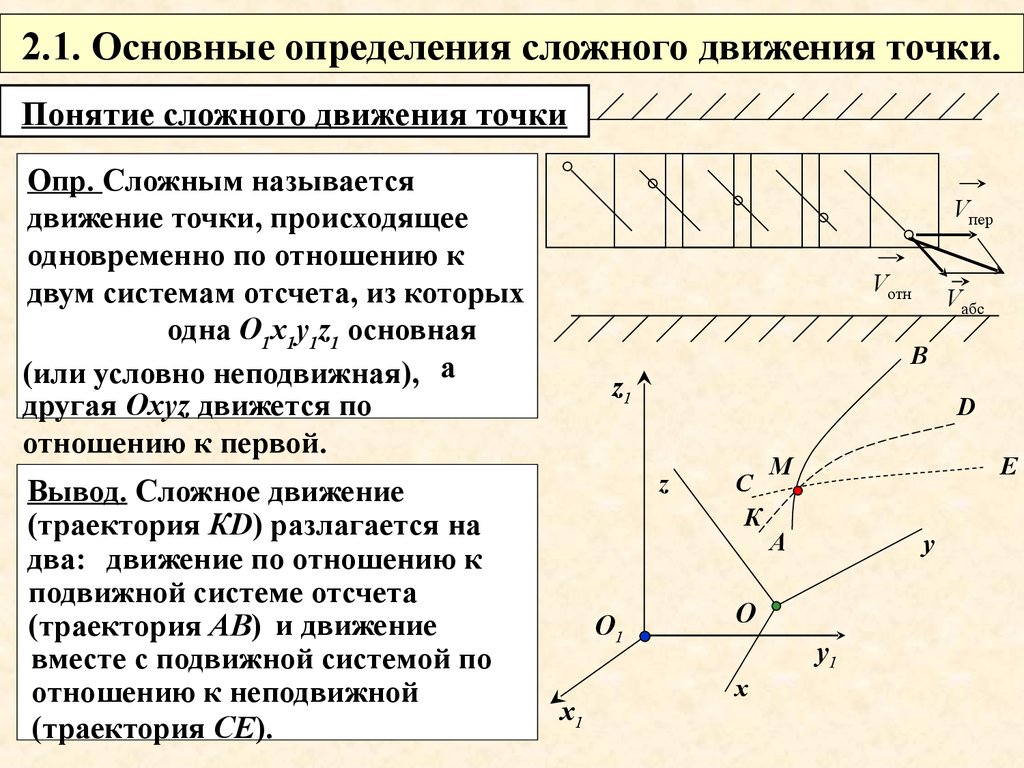
2.1. Основные определения сложного движения точки.Понятие сложного движения точки
Опр. Сложным называется
движение точки, происходящее
одновременно по отношению к
двум системам отсчета, из которых
одна О1х1у1z1 основная
(или условно неподвижная), а
другая Охуz движется по
отношению к первой.
Вывод. Сложное движение
(траектория КD) разлагается на
два: движение по отношению к
подвижной системе отсчета
(траектория АВ) и движение
вместе с подвижной системой по
отношению к неподвижной
(траектория CЕ).
Vпер
Vотн
Vабс
В
z1
D
z
О1
х1
С
К
М
Е
А
у
O
у1
х
4.
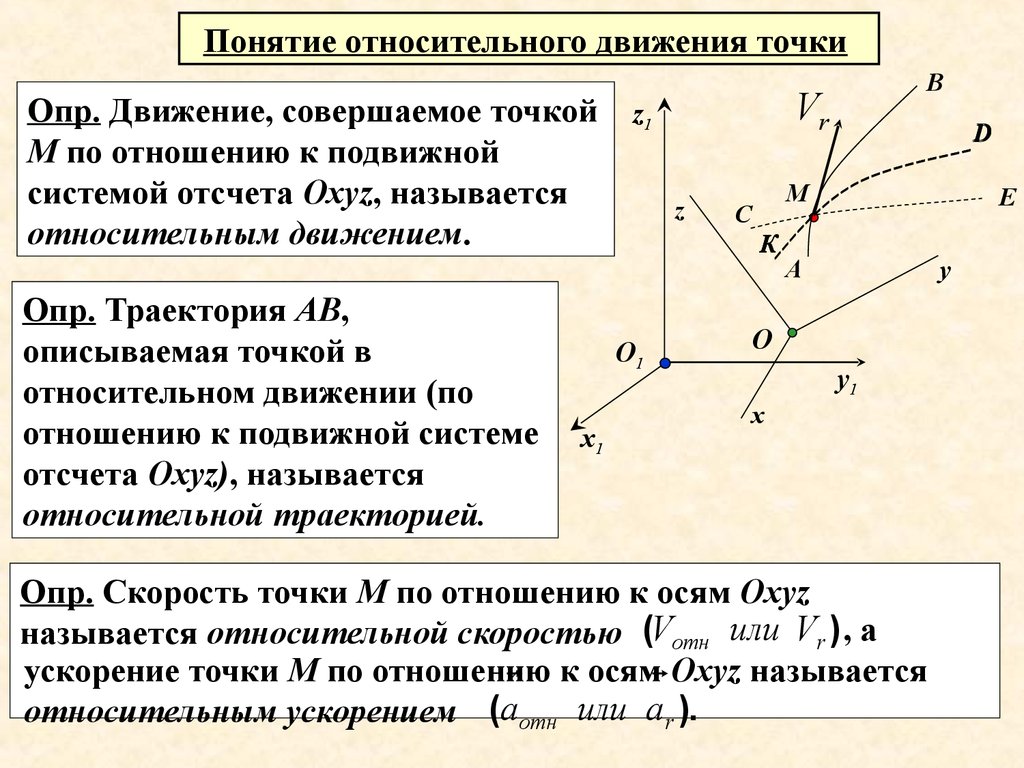
Понятие относительного движения точкиОпр. Движение, совершаемое точкой
М по отношению к подвижной
системой отсчета Охуz, называется
относительным движением.
Опр. Траектория АВ,
описываемая точкой в
относительном движении (по
отношению к подвижной системе
отсчета Охуz), называется
относительной траекторией.
z1
z
В
D
М
С
К
О1
х1
Vr
Е
А
у
O
у1
х
Опр. Скорость точки М по отношению к осям
Охуz
называется относительной скоростью (Vотн или Vr ) , а
ускорение точки М по отношению
к осям Охуz называется
относительным ускорением (аотн или а r ).
5.
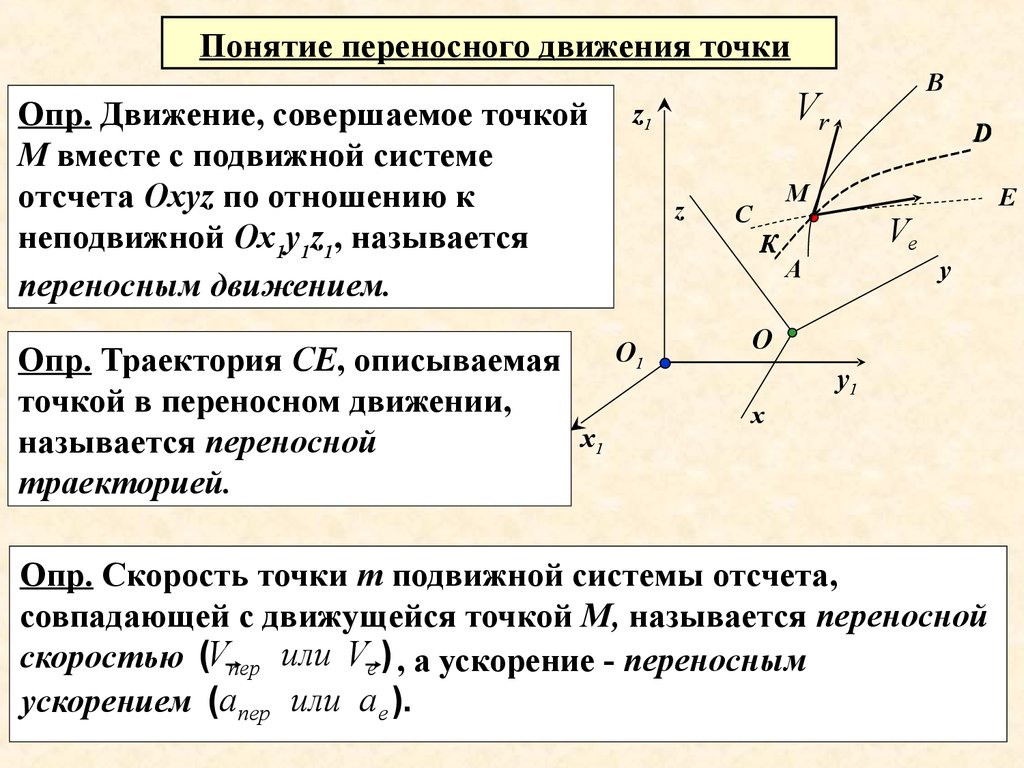
Понятие переносного движения точкиОпр. Движение, совершаемое точкой
М вместе с подвижной системе
отсчета Охуz по отношению к
неподвижной Ох1у1z1, называется
переносным движением.
Опр. Траектория СЕ, описываемая
точкой в переносном движении,
х1
называется переносной
траекторией.
z1
z
В
D
М
С
К
О1
Vr
Ve
А
Е
у
O
у1
х
Опр. Скорость точки т подвижной системы отсчета,
совпадающей с движущейся
точкой М, называется переносной
скоростью (Vпер или Vе ) , а ускорение - переносным
ускорением (апер или ае ).
6.
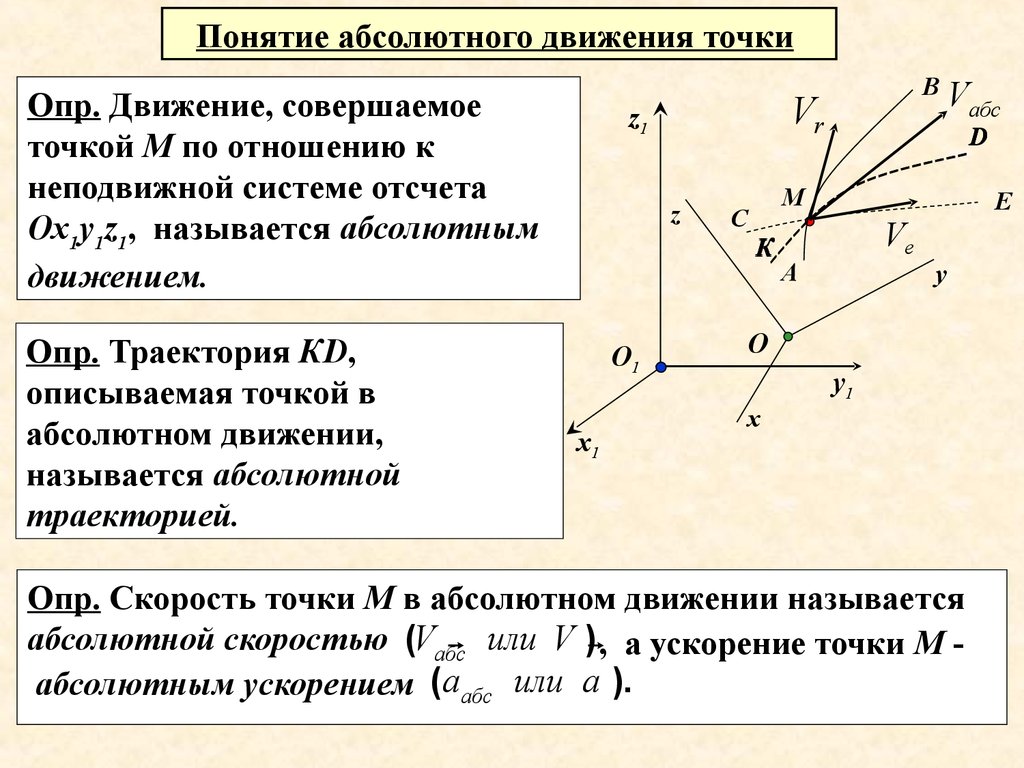
Понятие абсолютного движения точкиОпр. Движение, совершаемое
точкой М по отношению к
неподвижной системе отсчета
Ох1у1z1, называется абсолютным
движением.
Опр. Траектория КD,
описываемая точкой в
абсолютном движении,
называется абсолютной
траекторией.
Vr
z1
z
х1
Vабс
D
М
С
К
О1
В
Ve
А
Е
у
O
у1
х
Опр. Скорость точки М в абсолютном
движении называется
абсолютной скоростью (Vабс или V ) , а ускорение точки М
абсолютным ускорением (аабс или а ).
7.
2.2. Кинематическиехарактеристики точки при ее сложном движении
Определение скорости точки
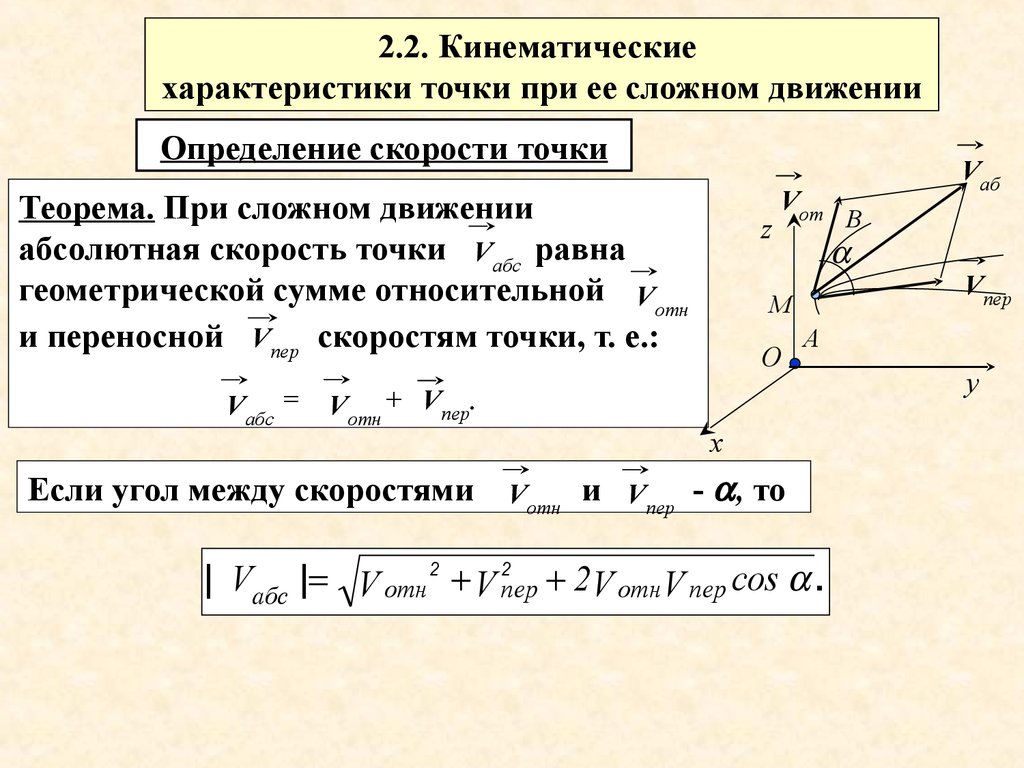
Теорема. При сложном движении
абсолютная скорость точки Vабс равна
геометрической сумме относительной Vотн
и переносной Vпер скоростям точки, т. е.:
Vабс
=
Vотн
z
Vот
В
М
О
Vаб
Vпер
А
+ Vпер.
х
Если угол между скоростями Vотн и Vпер - , то
| Vабс | V отн 2 V 2пер 2V отн V пер cos .
у
8.
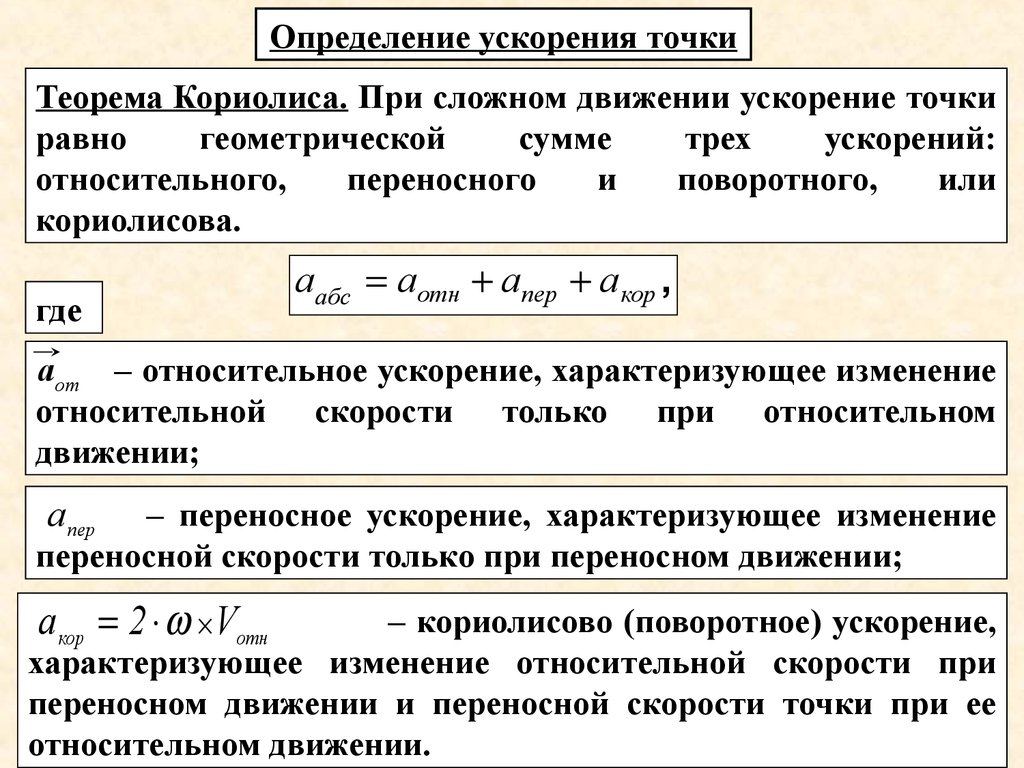
Определение ускорения точкиТеорема Кориолиса. При сложном движении ускорение точки
равно
геометрической
сумме
трех
ускорений:
относительного,
переносного
и
поворотного,
или
кориолисова.
где
аабс аотн апер акор ,
аот – относительное ускорение, характеризующее изменение
относительной скорости только при относительном
движении;
апер
– переносное ускорение, характеризующее изменение
переносной скорости только при переносном движении;
акор 2 Vотн
– кориолисово (поворотное) ускорение,
характеризующее изменение относительной скорости при
переносном движении и переносной скорости точки при ее
относительном движении.
9.
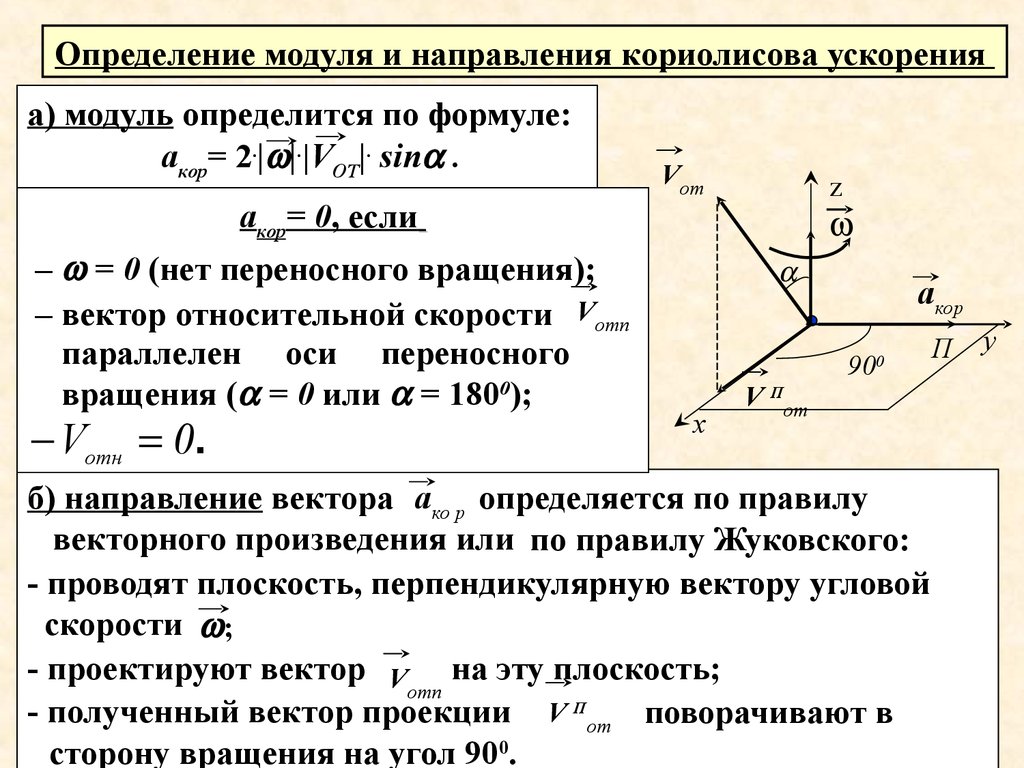
Определение модуля и направления кориолисова ускоренияа) модуль определится по формуле:
акор= 2.| |.|VОТ|. sin .
акор= 0, если
– = 0 (нет переносного вращения);
– вектор относительной скорости Vотn
параллелен оси переносного
0
вращения
(
=
0
или
=
180
);
Vотн 0.
Vот
z
х
V Пот
акор
90
0
б) направление вектора ако р определяется по правилу
векторного произведения или по правилу Жуковского:
- проводят плоскость, перпендикулярную вектору угловой
скорости ;
- проектируют вектор V на эту плоскость;
отn
- полученный вектор проекции V Пот поворачивают в
сторону вращения на угол 900.
П
у
10.
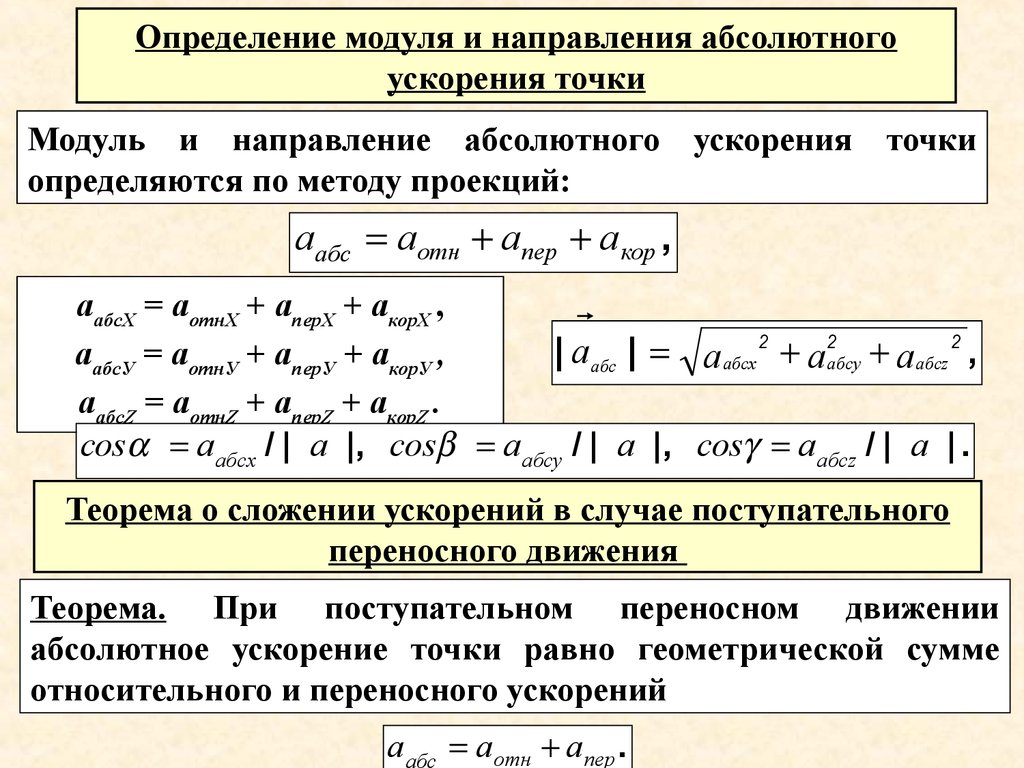
Определение модуля и направления абсолютногоускорения точки
Модуль и направление абсолютного ускорения точки
определяются по методу проекций:
аабс аотн апер акор ,
аабcХ = аотнХ + аперХ + акорХ ,
| аабс | а абсx 2 а2абсу а абсz 2 ,
аабcУ = аотнУ + аперУ + акорУ ,
аабcZ = аотнZ + аперZ + акорZ .
соs аабсx / | а |, сos аабсу / | а |, cos аабсz / | а | .
Теорема о сложении ускорений в случае поступательного
переносного движения
Теорема. При поступательном переносном движении
абсолютное ускорение точки равно геометрической сумме
относительного и переносного ускорений
аабс аотн апер .
11.
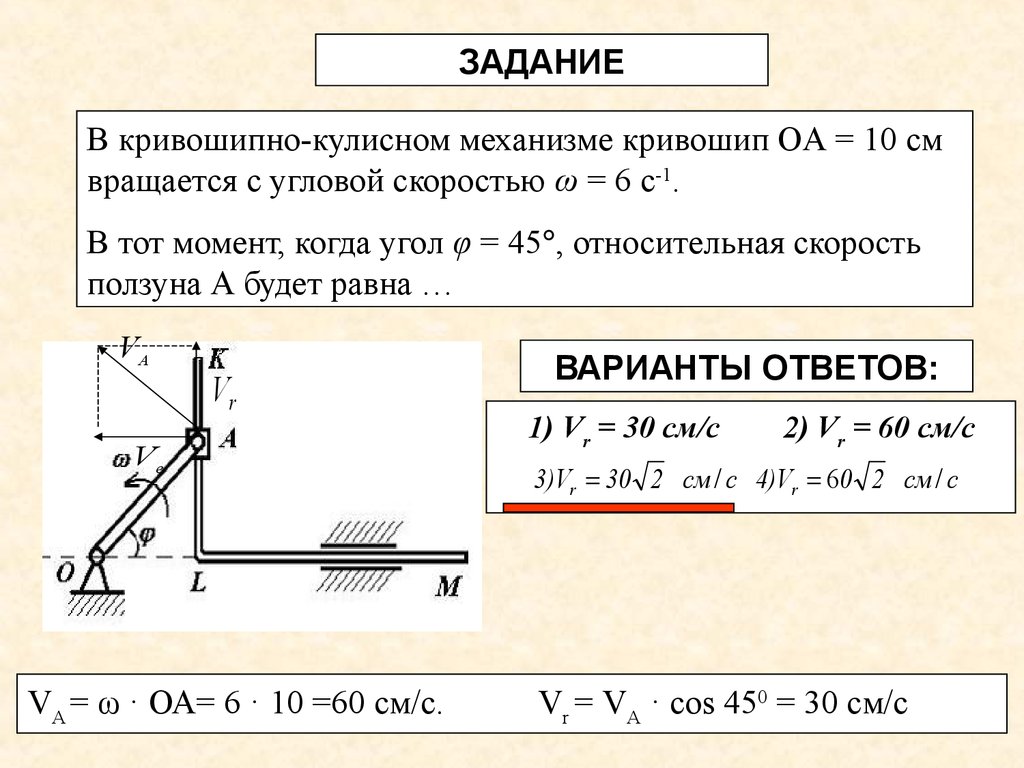
ЗАДАНИЕВ кривошипно-кулисном механизме кривошип OА = 10 см
вращается с угловой скоростью ω = 6 c-1.
В тот момент, когда угол φ = 45 , относительная скорость
ползуна А будет равна …
VA
Vr
Vе
VA = ω · ОА= 6 · 10 =60 см/с.
ВАРИАНТЫ ОТВЕТОВ:
1) Vr = 30 см/с
2) Vr = 60 см/с
3)Vr 30 2 см / с 4)Vr 60 2 см / с
Vr = VA · cos 450 = 30 см/с
12.
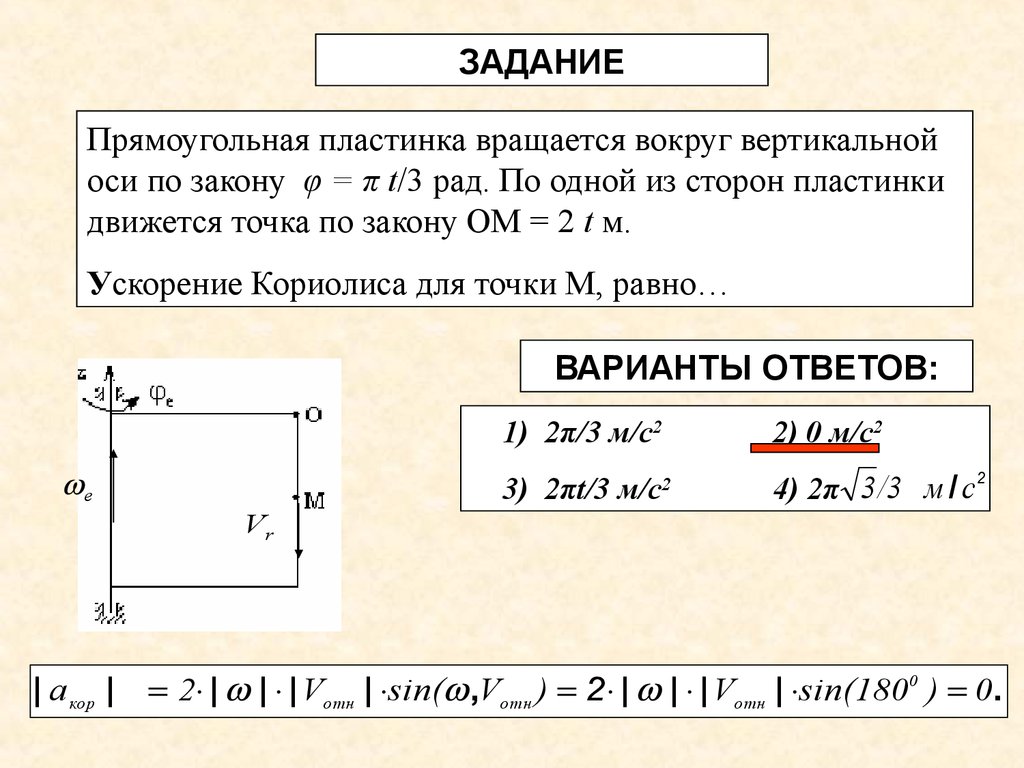
ЗАДАНИЕПрямоугольная пластинка вращается вокруг вертикальной
оси по закону φ = π t/3 рад. По одной из сторон пластинки
движется точка по закону ОМ = 2 t м.
Ускорение Кориолиса для точки М, равно…
ВАРИАНТЫ ОТВЕТОВ:
е
Vr
1) 2π/3 м/с2
2) 0 м/с2
3) 2πt/3 м/с2
2
4) 2π 3 /3 м / с
| а кор | 2 | | | Vотн | sin( ,Vотн ) 2 | | | Vотн | sin(1800 ) 0.