 mathematics
mathematicsSimilar presentations:



")

")




Лекция 3. 2. Математические модели линейных непрерывных систем
1.
ЛЕКЦИЯ 32 Математические модели линейных непрерывных систем
2.1 Дифференциальные уравнения в форме Коши
2.2 Метод пространства состояний
2.3 Примеры описания систем в пространстве состояний
Цифровые системы управления
2.
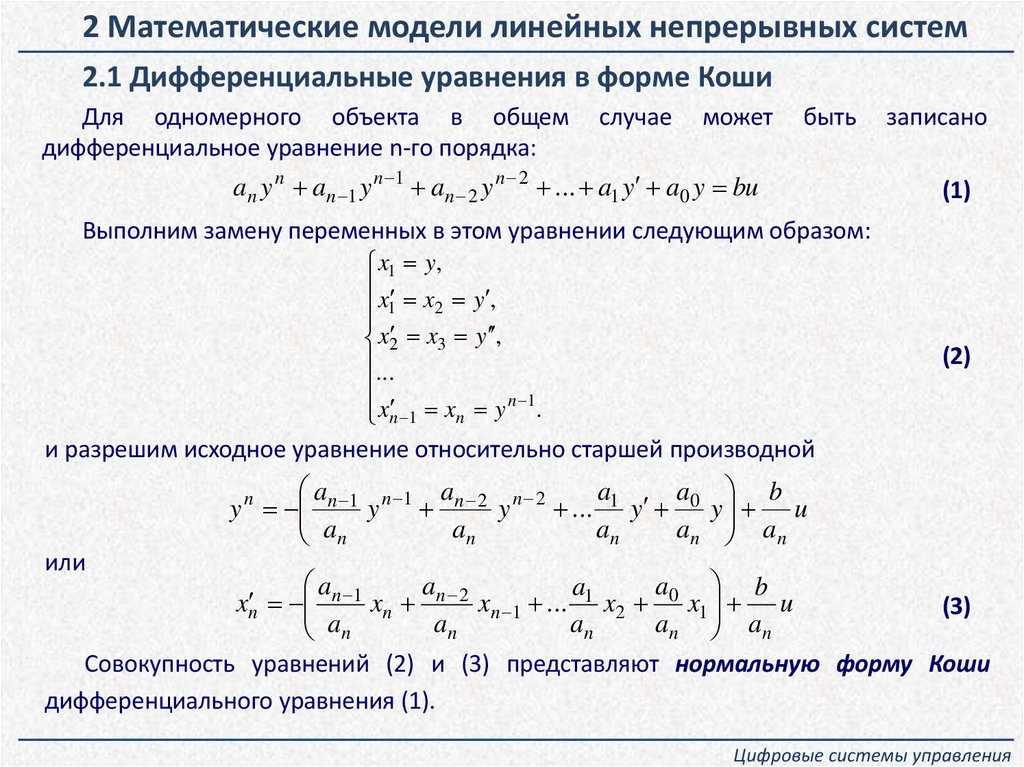
2 Математические модели линейных непрерывных систем2.1 Дифференциальные уравнения в форме Коши
Для одномерного объекта в общем
дифференциальное уравнение n-го порядка:
случае
может
быть
an y n an 1 y n 1 an 2 y n 2 ... a1 y a0 y bu
записано
(1)
Выполним замену переменных в этом уравнении следующим образом:
x1 y,
x x y ,
2
1
x2 x3 y ,
...
xn 1 xn y n 1.
(2)
и разрешим исходное уравнение относительно старшей производной
a
a
a b
a
y n n 1 y n 1 n 2 y n 2 ... 1 y 0 y u
an
an
an an
an
или
a
b
a
a
a
xn n 1 xn n 2 xn 1 ... 1 x2 0 x1 u
(3)
an
an
an an
an
Совокупность уравнений (2) и (3) представляют нормальную форму Коши
дифференциального уравнения (1).
Цифровые системы управления
3.
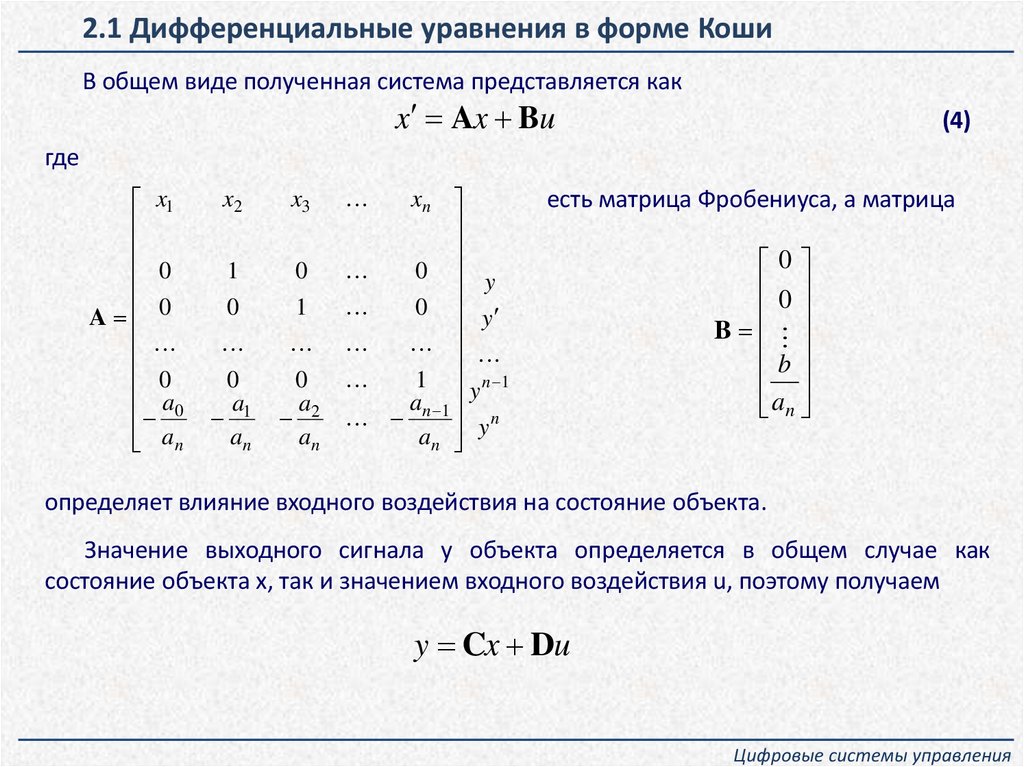
2.1 Дифференциальные уравнения в форме КошиВ общем виде полученная система представляется как
x Ax Bu
(4)
где
x1
0
A 0
0
a0
an
x2
x3
1
0
0
a
1
an
0
1
0
a
2
an
xn
0 y
0 y
1 y n 1
a
n 1 y n
an
есть матрица Фробениуса, а матрица
0
0
B
b
a
n
определяет влияние входного воздействия на состояние объекта.
Значение выходного сигнала y объекта определяется в общем случае как
состояние объекта x, так и значением входного воздействия u, поэтому получаем
y Cx Du
Цифровые системы управления
4.
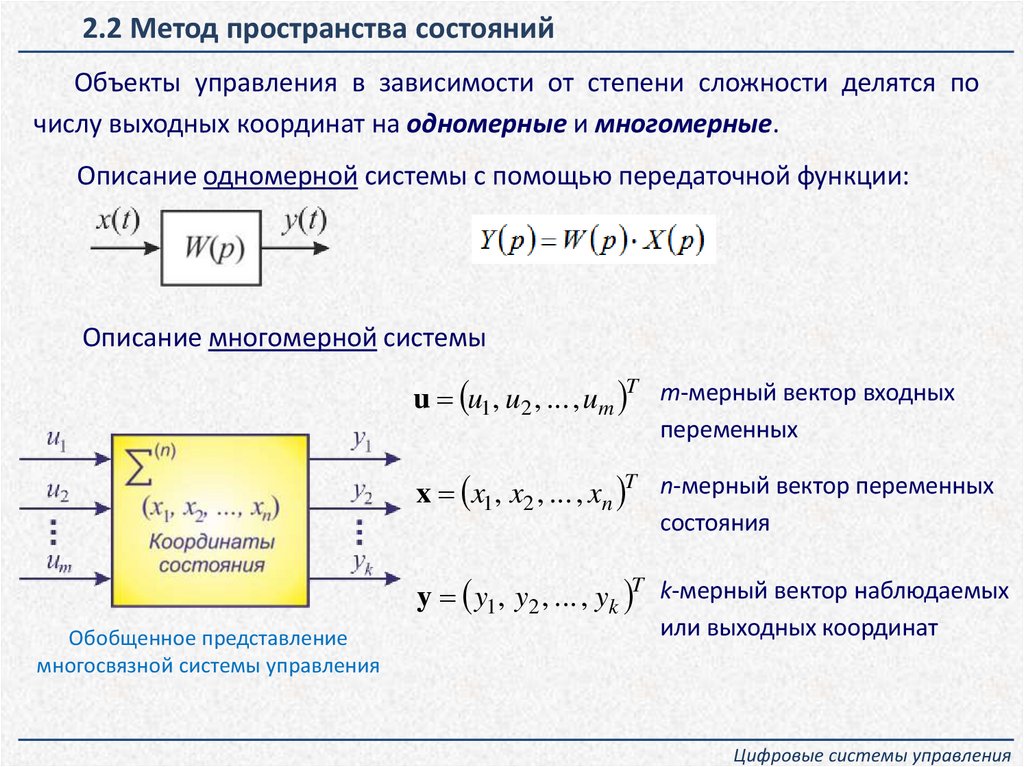
2.2 Метод пространства состоянийОбъекты управления в зависимости от степени сложности делятся по
числу выходных координат на одномерные и многомерные.
Описание одномерной системы с помощью передаточной функции:
Описание многомерной системы
u u1, u2 , ... , um T m-мерный вектор входных
переменных
x x1, x2 , ... , xn T n-мерный вектор переменных
состояния
y y1, y2 , ... , yk T k-мерный вектор наблюдаемых
Обобщенное представление
многосвязной системы управления
или выходных координат
Цифровые системы управления
5.
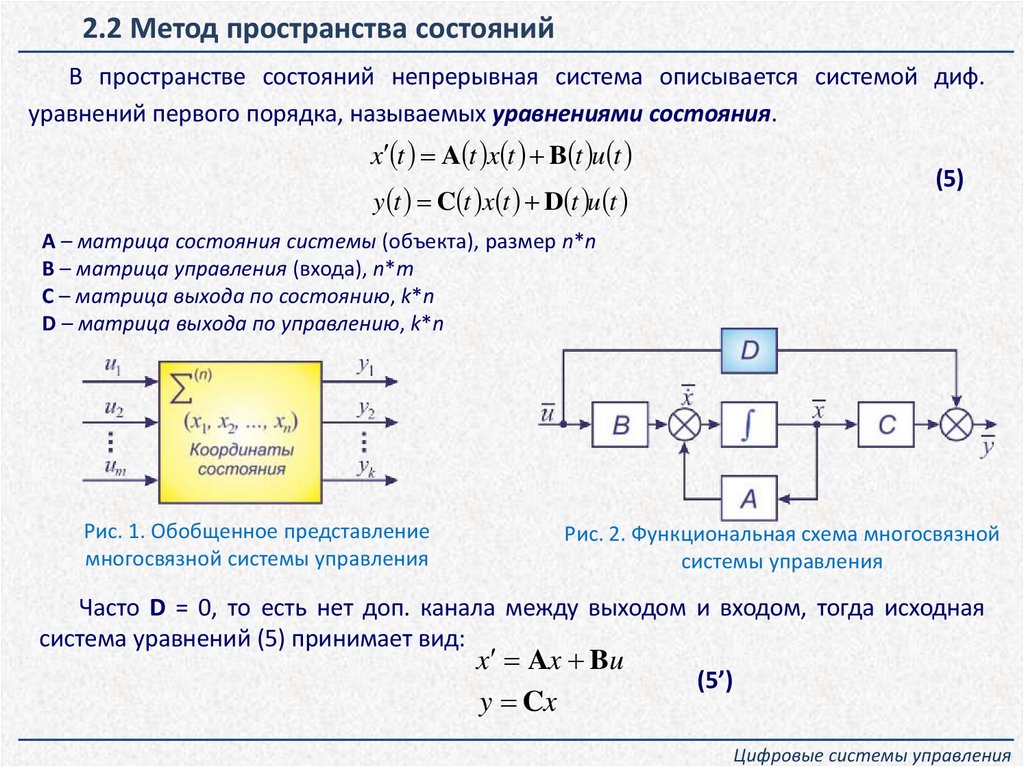
2.2 Метод пространства состоянийВ пространстве состояний непрерывная система описывается системой диф.
уравнений первого порядка, называемых уравнениями состояния.
x t A t x t B t u t
(5)
y t C t x t D t u t
A – матрица состояния системы (объекта), размер n*n
B – матрица управления (входа), n*m
C – матрица выхода по состоянию, k*n
D – матрица выхода по управлению, k*n
Рис. 1. Обобщенное представление
многосвязной системы управления
Рис. 2. Функциональная схема многосвязной
системы управления
Часто D = 0, то есть нет доп. канала между выходом и входом, тогда исходная
система уравнений (5) принимает вид:
x Ax Bu
y Cx
(5’)
Цифровые системы управления
6.
2.2 Метод пространства состоянийМатрицы A, B, C могут быть переменными или постоянными, в
последнем случае модель системы называют стационарной или моделью с
постоянными параметрами.
Линейная система полностью задана, если заданы: ее матрицы A, B, C и
начальное состояние , что можно записать в виде:
n : A, B, C; x 0
(6)
Матричная передаточная функция системы имеет вид:
W p C pE A 1 B D
(7)
где E – единичная матрица.
Цифровые системы управления
7.
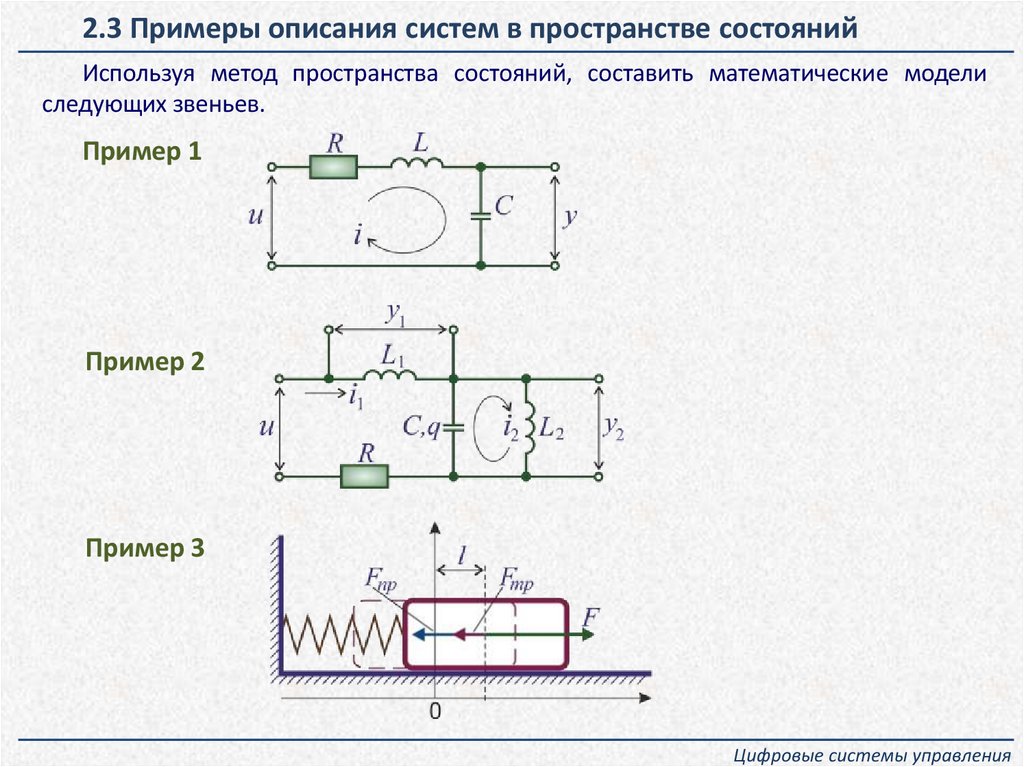
2.3 Примеры описания систем в пространстве состоянийИспользуя метод пространства состояний, составить математические модели
следующих звеньев.
Пример 1
Пример 2
Пример 3
Цифровые системы управления
8.
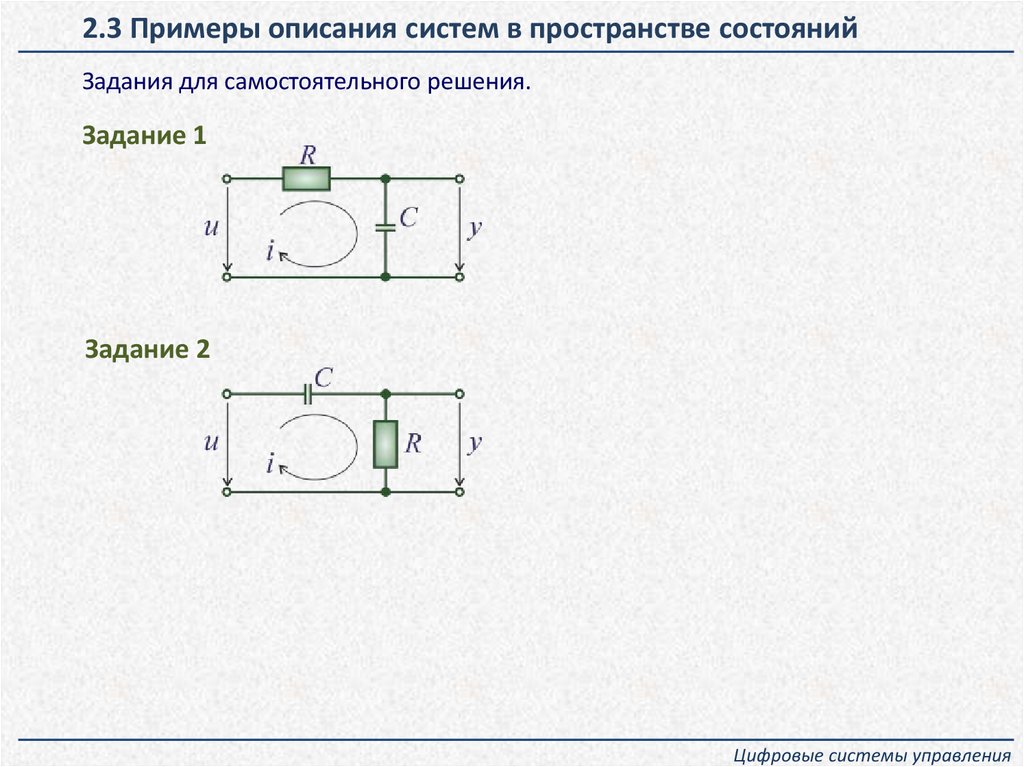
2.3 Примеры описания систем в пространстве состоянийЗадания для самостоятельного решения.
Задание 1
Задание 2
Цифровые системы управления