 industry
industrySimilar presentations:










Автоматическая стабилизация скорости и управление скоростью изменением тяги двигателя
1.
Т. 2.4. Лекция 8. Автоматическая стабилизация скорости иуправление скоростью изменением тяги двигателя
Вопросы:
2.17. Автомат тяги, функциональные схемы аналогового АТ, работа;
2.18. Управление движением и особенности законов управления;
2.19. Цифроаналоговые автоматы тяги.
Литература:
1. [1]__стр._стр.389-397
2.
2.17. Автомат тяги. Функциональные схемы аналогового АТ, работаНа этапах захода на посадку и посадки
стабилизация и управление скоростью полета
осуществляются
непосредственным
воздействием на тягу двигателей. Это
объясняется большей точностью и большим
быстродействием
контура
управления
скоростью путем изменения тяги по сравнению
с контуром управления скоростью путем
отклонения руля высоты. Этой цели служит
автомат тяги.
3.
Автомат тяги (АТ) - средство автоматическогоуправления, обеспечивающее стабилизацию и управление
продольным движением самолета путем изменения тяги
двигателей при возникновении рассогласования между
значениями текущей и заданной скорости.
С точки зрения САУ автомат тяги состоит из
измерителя, задаваемой и текущей скоростей полета,
вычислителя
и
сервопривода,
отрабатывающего
управляющий сигнал.
4.
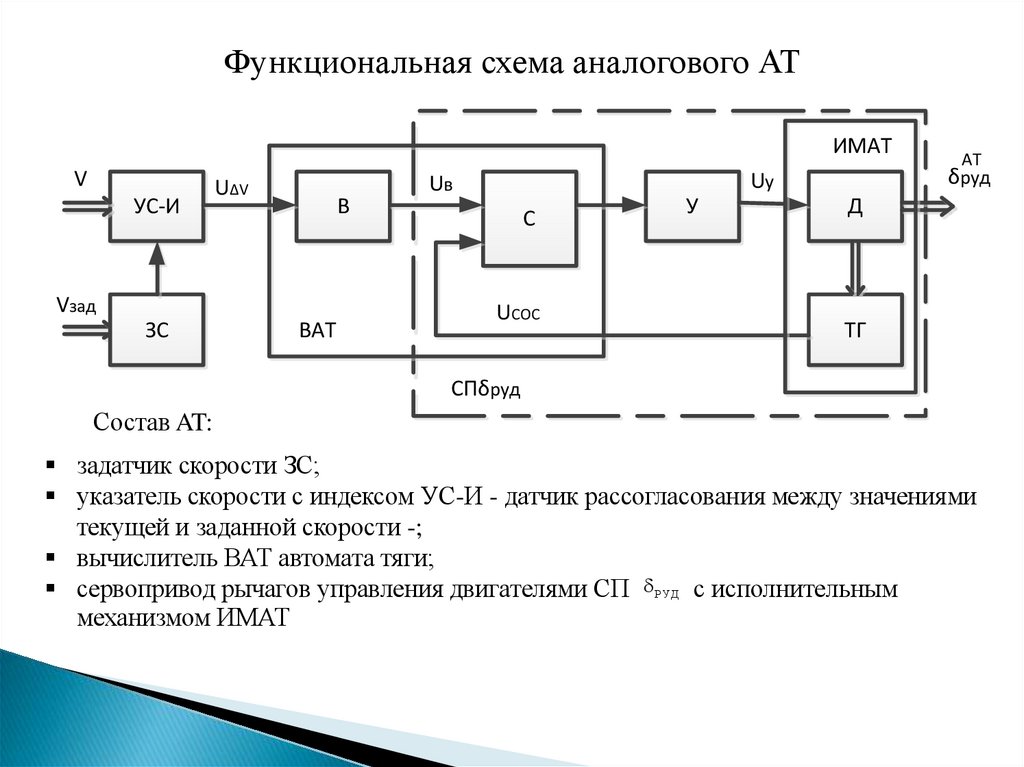
Функциональная схема аналогового АТИМАТ
V
УС-И
UΔV
В
Vзад
ЗС
ВАТ
Uу
Uв
С
UСОС
У
АТ
δруд
Д
ТГ
СПδруд
Состав AT:
задатчик скорости ЗС;
указатель скорости с индексом УС-И - датчик рассогласования между значениями
текущей и заданной скорости -;
вычислитель ВАТ автомата тяги;
сервопривод рычагов управления двигателями СП РУД с исполнительным
механизмом ИМАТ
5.
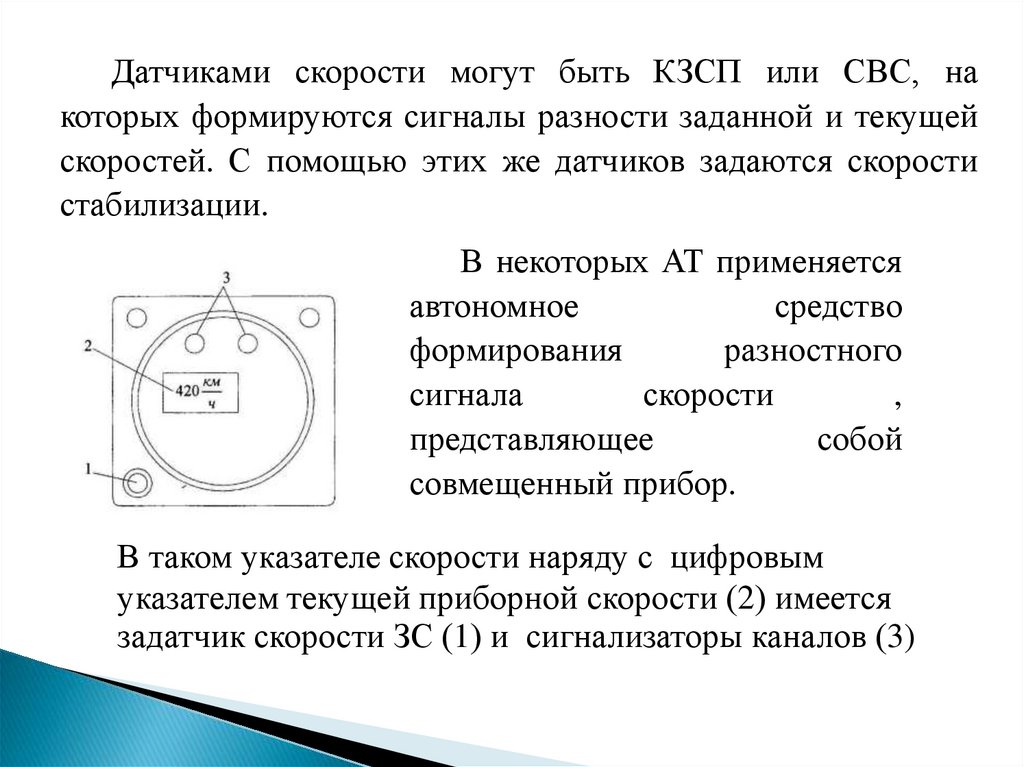
Датчиками скорости могут быть КЗСП или СВС, накоторых формируются сигналы разности заданной и текущей
скоростей. С помощью этих же датчиков задаются скорости
стабилизации.
В некоторых АТ применяется
автономное
средство
формирования
разностного
сигнала
скорости
,
представляющее
собой
совмещенный прибор.
В таком указателе скорости наряду с цифровым
указателем текущей приборной скорости (2) имеется
задатчик скорости ЗС (1) и сигнализаторы каналов (3)
6.
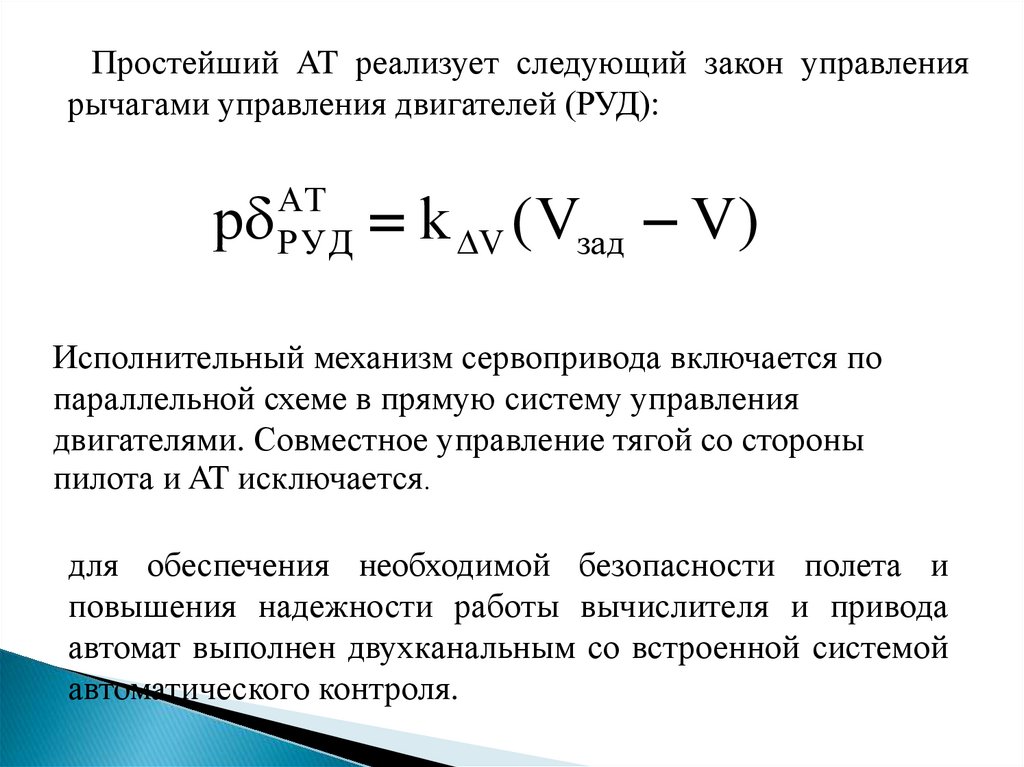
Простейший AT реализует следующий закон управлениярычагами управления двигателей (РУД):
p
АТ
Р УД
k V (Vзад V)
Исполнительный механизм сервопривода включается по
параллельной схеме в прямую систему управления
двигателями. Совместное управление тягой со стороны
пилота и AT исключается.
для обеспечения необходимой безопасности полета и
повышения надежности работы вычислителя и привода
автомат выполнен двухканальным со встроенной системой
автоматического контроля.
7.
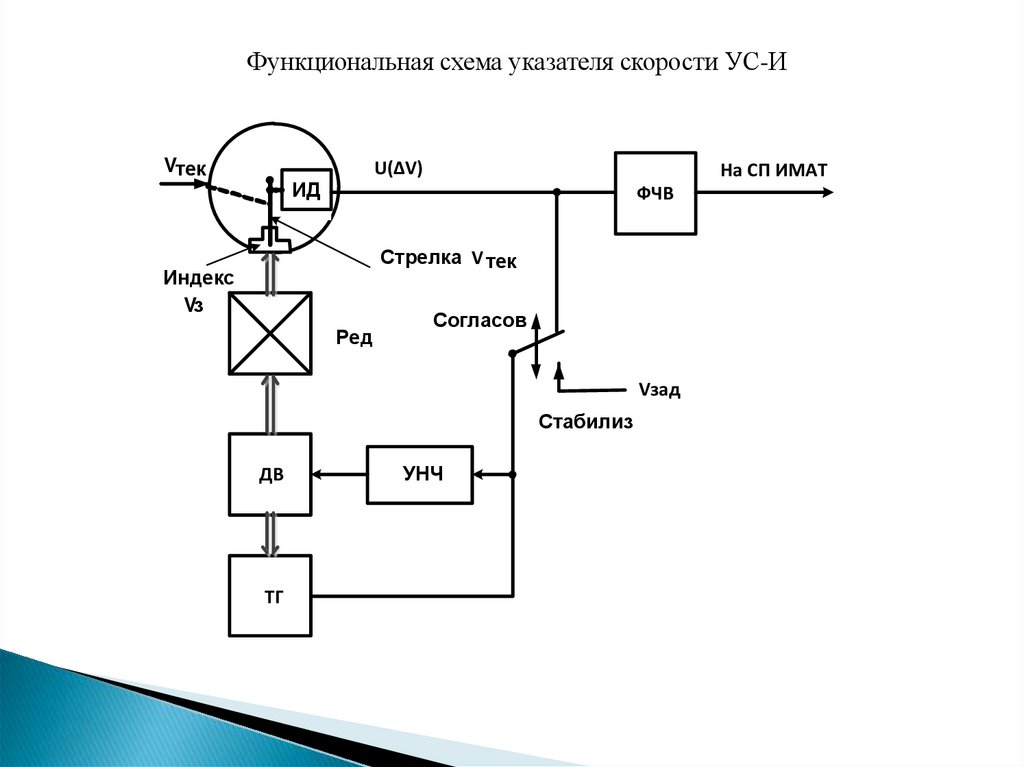
Функциональная схема указателя скорости УС-ИVтек
U(ΔV)
ИД
На СП ИМАТ
ФЧВ
Стрелка V тек
Индекс
Vз
Ред
Согласов
Vзад
Стабилиз
ДВ
ТГ
УНЧ
8.
AT работает в четырех режимах: согласования, стабилизация,управления скоростью и «Уход».
В режиме «Согласования» в указателе скорости УС-И
происходит непрерывное «обнуление» сигнала текущей
скорости с помощью электромеханической следящей системы.
УС состоит из БСКТ (стрелка) и СКТ (индекс) статоры
которых связаны. С ротора БСКТ сигнал поступает через ИД
на следящую систему , которая поворачивающей ротор СКТ
(индекс) и согласовывающей стрелку и индекс скоростей. В
режиме согласование происходит непрерывное слежение
ротора СКТ (индекса) за стрелкой (текущей скоростью), и
запоминание текущей скорости в момент включения режима
стабилизации, чем обеспечивается подготовка AT к
безударному включению для стабилизации скорости.
9.
При включении режима «Стабилизации скорости» следящаясистема указателя скорости размыкается, запоминается значение
скорости V0 , которую имел самолет в момент включения
режима «стабилизации», в виде положения индекса. и далее
формируется разностный сигнал u V , пропорциональный
разности текущей и запомненной скоростям
. Сигнал
поступает на вход вычислителя В, где формируется сигнал u в ,
поступающий в сумматор сервопривода С.
Сервопривод преобразует этот сигнал в перемещение рычагов
исполнительного механизма автомата тяги ИMAT. Скорость
отработки рычагов ИМAT будет пропорциональна
рассогласованию скоростей V V0 V
Сервопривод будет отрабатывать РУД до тех пор, пока тяга
двигателей не увеличится (уменьшится) настолько, что
скорость самолета примет заданное значение скорости и
стрелка указателя УС-И вернется к индексу заданной
скорости.
10.
В режиме «Управления скоростью» пилот, воздействуя наиндекс указателя УС-И с помощью задатчика, устанавливает
заданную скорость. В результате в УС-И формируется сигнал
разности скоростей, который отрабатывается АТ также как в
режиме стабилизации
В режиме «Уход» датчик УС-И отключается от вычислителя.
uв
Управляющий сигнал
формируется вычислителем
независимо от параметров положения и движения самолета
таким образом, что сервопривод плавно с постоянной
скоростью перемещает РУД во взлетное положение.
11.
Исполнительный механизм ИМAT, кроме двигателягенератора, включает редуктор, муфты сцепления ипредельного момента, а также предохранительную муфту.
Муфта сцепления соединяет двигатель-генератор с
редуктором. Предохранительная муфта устанавливается на
входном валу механизма и обеспечивает возможность
управления
двигателем
при
заклинивании
муфты
предельного момента или шестерен редуктора. Приложив
соответствующее усилие к РУД, пилот может «пересилить»
AT и установить РУД в желаемое положение. Рабочий
диапазон
перемещения
рычагов
ИМAT ограничен
концевыми выключателями.
12.
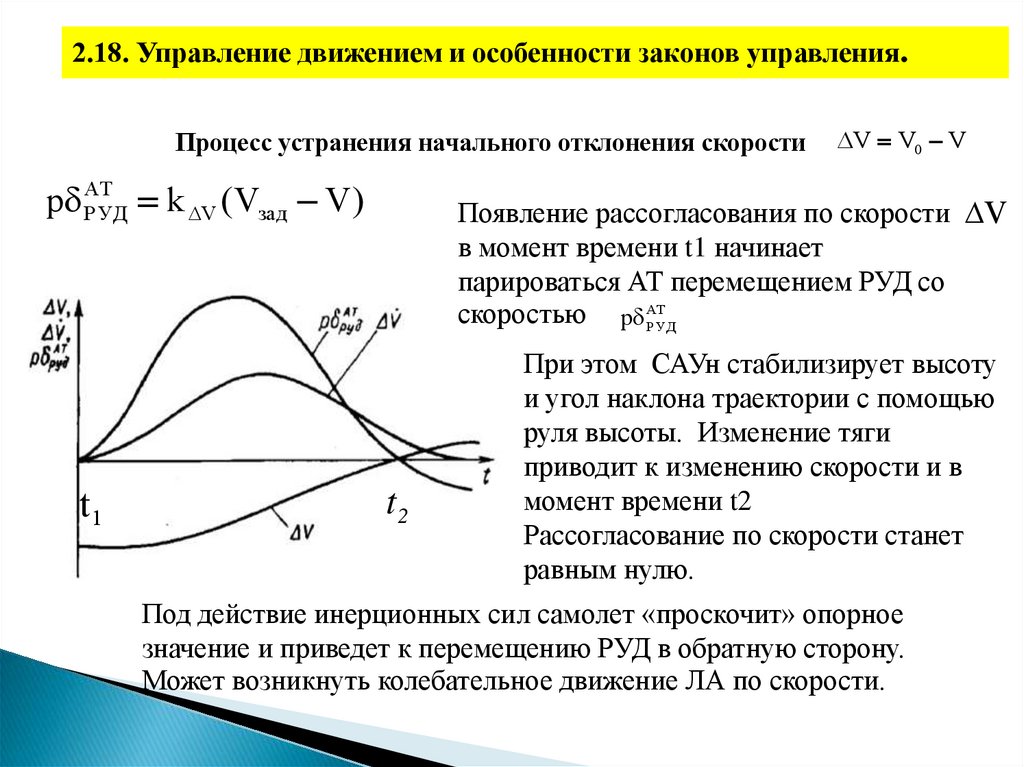
2.18. Управление движением и особенности законов управления.Процесс устранения начального отклонения скорости
p АТ
Р УД k V ( Vзад V )
t1
V V0 V
Появление рассогласования по скорости V
в момент времени t1 начинает
парироваться АТ перемещением РУД со
скоростью p АТ
Р УД
t2
При этом САУн стабилизирует высоту
и угол наклона траектории с помощью
руля высоты. Изменение тяги
приводит к изменению скорости и в
момент времени t2
Рассогласование по скорости станет
равным нулю.
Под действие инерционных сил самолет «проскочит» опорное
значение и приведет к перемещению РУД в обратную сторону.
Может возникнуть колебательное движение ЛА по скорости.
13.
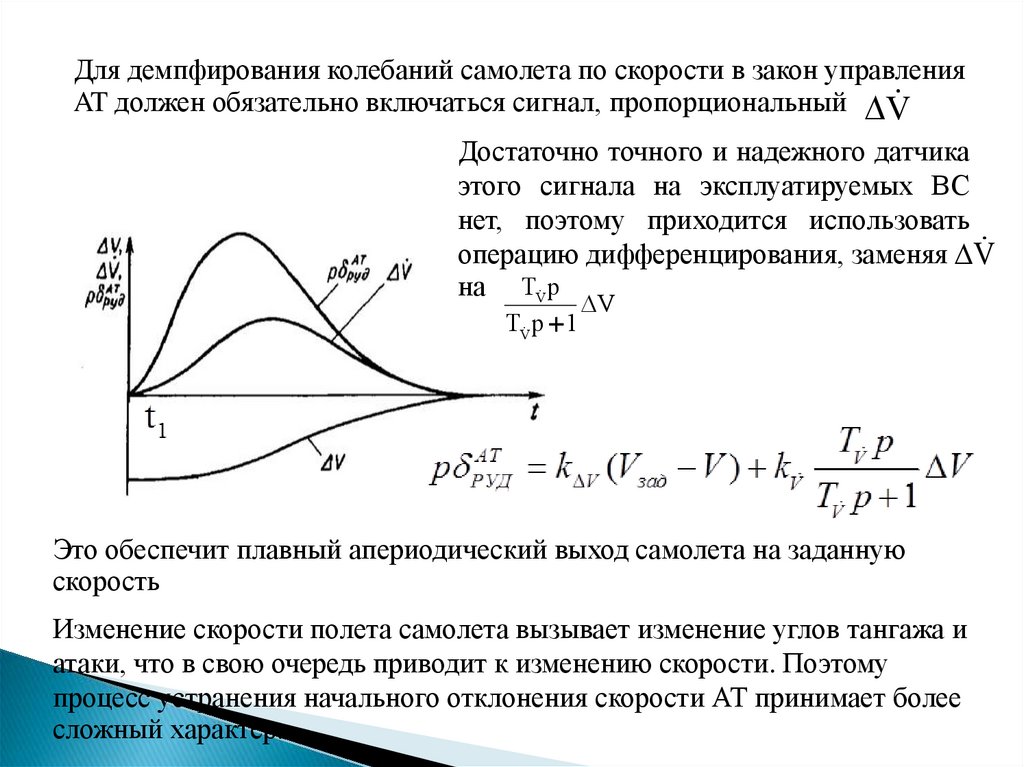
Для демпфирования колебаний самолета по скорости в закон управленияAT должен обязательно включаться сигнал, пропорциональный V
Достаточно точного и надежного датчика
этого сигнала на эксплуатируемых ВС
нет, поэтому приходится использовать
операцию дифференцирования, заменяя V
на TV p
TV p 1
V
Это обеспечит плавный апериодический выход самолета на заданную
скорость
Изменение скорости полета самолета вызывает изменение углов тангажа и
атаки, что в свою очередь приводит к изменению скорости. Поэтому
процесс устранения начального отклонения скорости АТ принимает более
сложный характер.
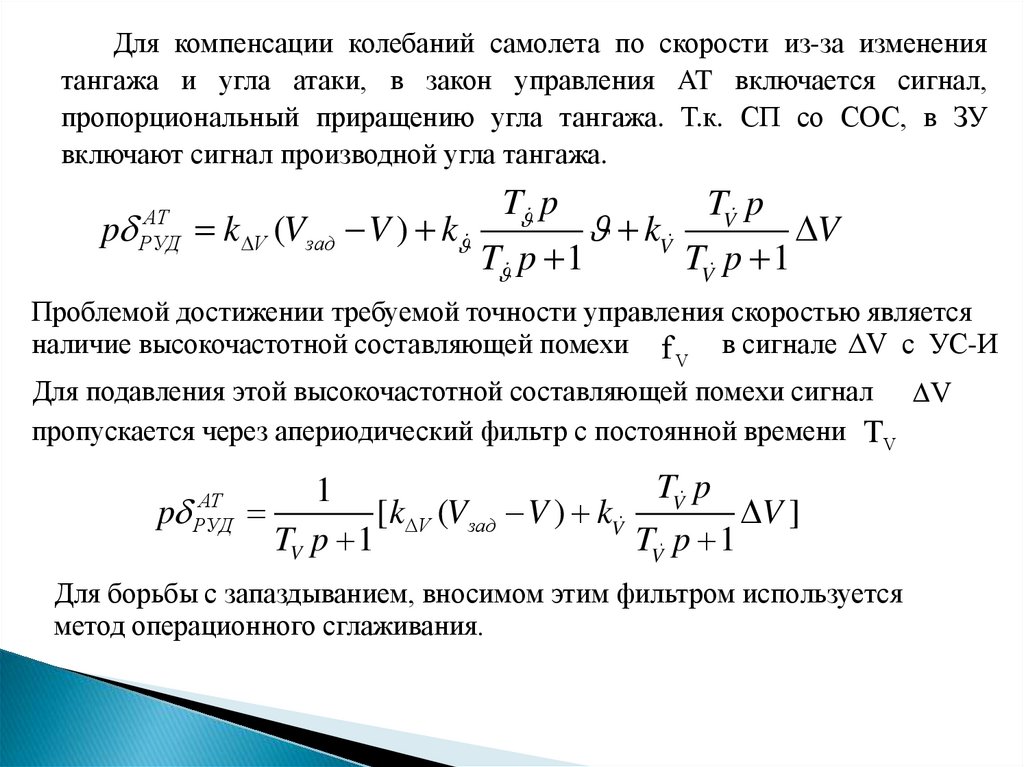
14.
Для компенсации колебаний самолета по скорости из-за изменениятангажа и угла атаки, в закон управления AT включается сигнал,
пропорциональный приращению угла тангажа. Т.к. СП со СОС, в ЗУ
включают сигнал производной угла тангажа.
p
АТ
РУД
T p
TV p
k V (Vзад V ) k
kV
V
T p 1
TV p 1
Проблемой достижении требуемой точности управления скоростью является
наличие высокочастотной составляющей помехи f V в сигнале V с УС-И
Для подавления этой высокочастотной составляющей помехи сигнал V
пропускается через апериодический фильтр с постоянной времени TV
p
АТ
РУД
TV p
1
[k V (Vзад V ) kV
V ]
TV p 1
TV p 1
Для борьбы с запаздыванием, вносимом этим фильтром используется
метод операционного сглаживания.
15.
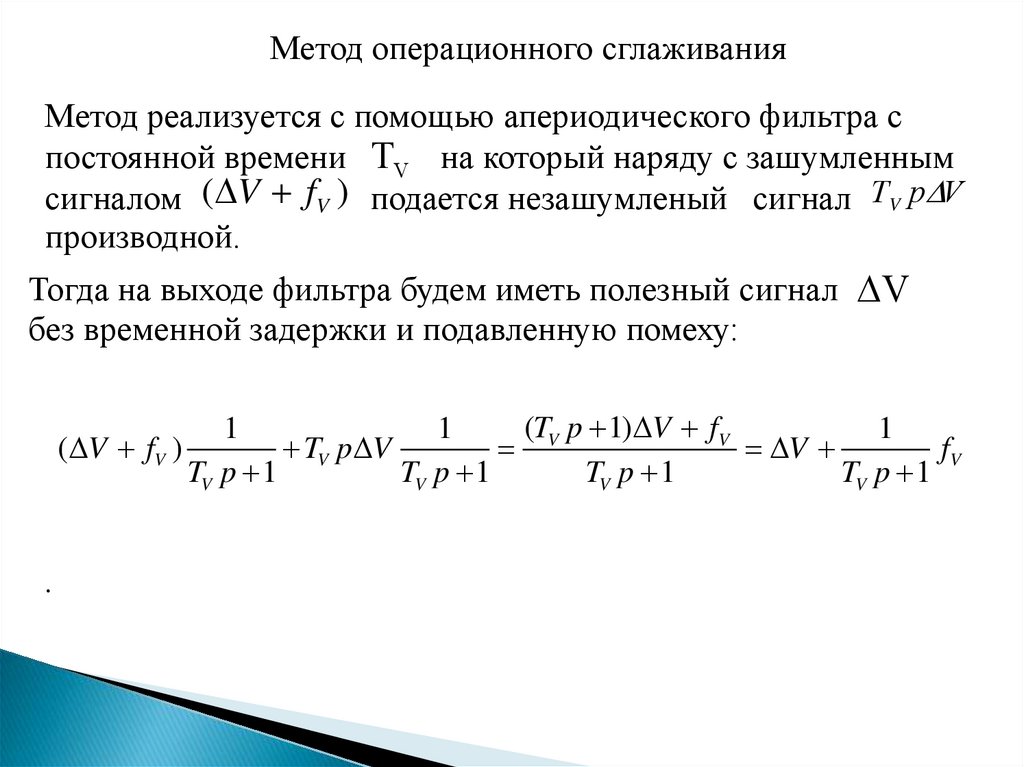
Метод операционного сглаживанияМетод реализуется с помощью апериодического фильтра с
постоянной времени TV на который наряду с зашумленным
сигналом ( V fV ) подается незашумленый сигнал ТV p V
производной.
Тогда на выходе фильтра будем иметь полезный сигнал V
без временной задержки и подавленную помеху:
(TV p 1) V fV
1
1
1
( V fV )
TV p V
V
fV
TV p 1
TV p 1
TV p 1
TV p 1
.
16.
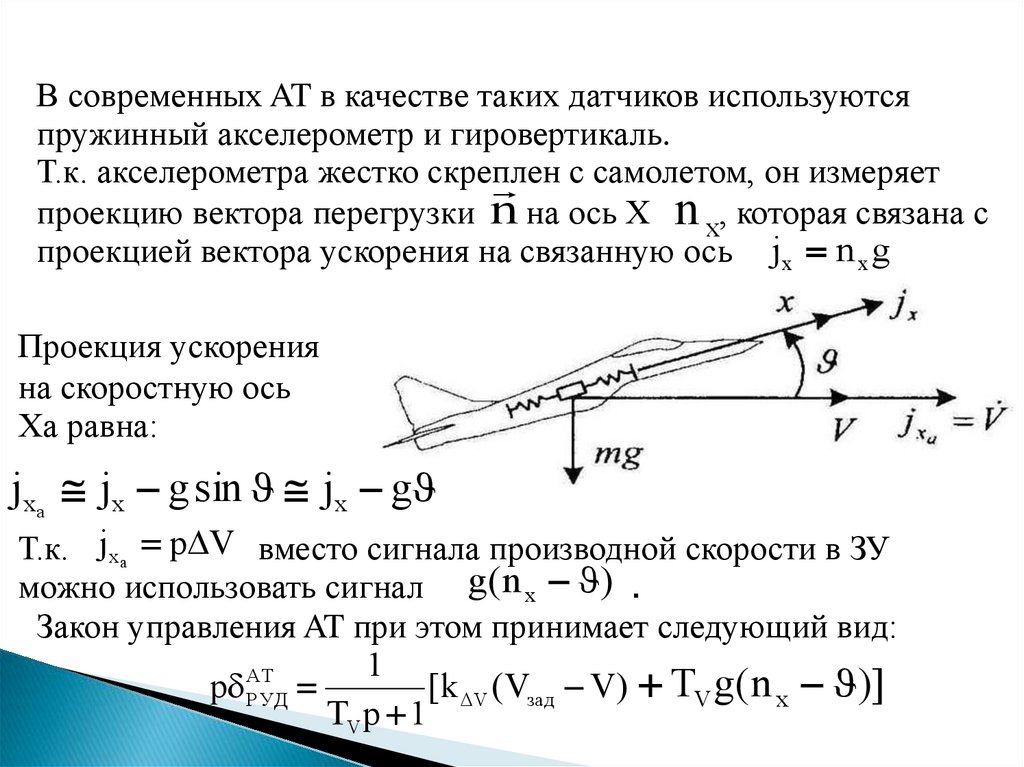
В современных AT в качестве таких датчиков используютсяпружинный акселерометр и гировертикаль.
Т.к. акселерометра жестко скреплен
с самолетом, он измеряет
проекцию вектора перегрузки n на ось Х n x, которая связана с
проекцией вектора ускорения на связанную ось jx n x g
Проекция ускорения
на скоростную ось
Ха равна:
jxa jx g sin jx g
Т.к. jx a p V вместо сигнала производной скорости в ЗУ
можно использовать сигнал g ( n x ) .
Закон управления AT при этом принимает следующий вид:
1
АТ
p РУД
[k V (Vзад V) TV g(n x )]
TV p 1
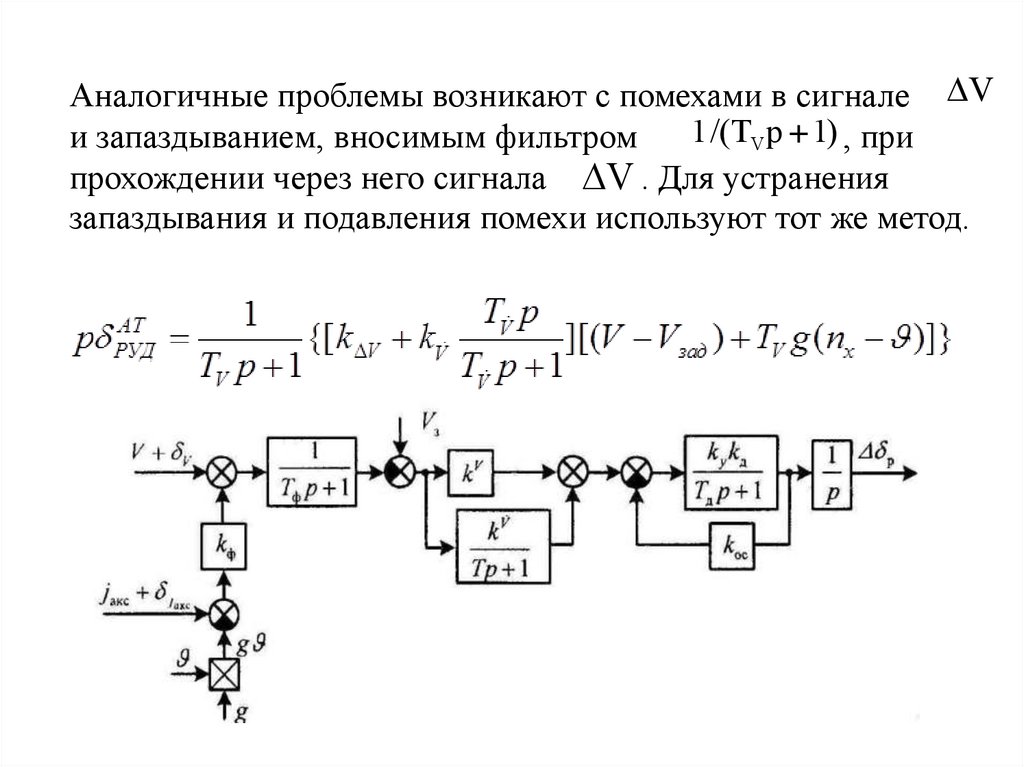
17.
Аналогичные проблемы возникают с помехами в сигнале V1 /(TV p 1) , при
и запаздыванием, вносимым фильтром
прохождении через него сигнала V . Для устранения
запаздывания и подавления помехи используют тот же метод.
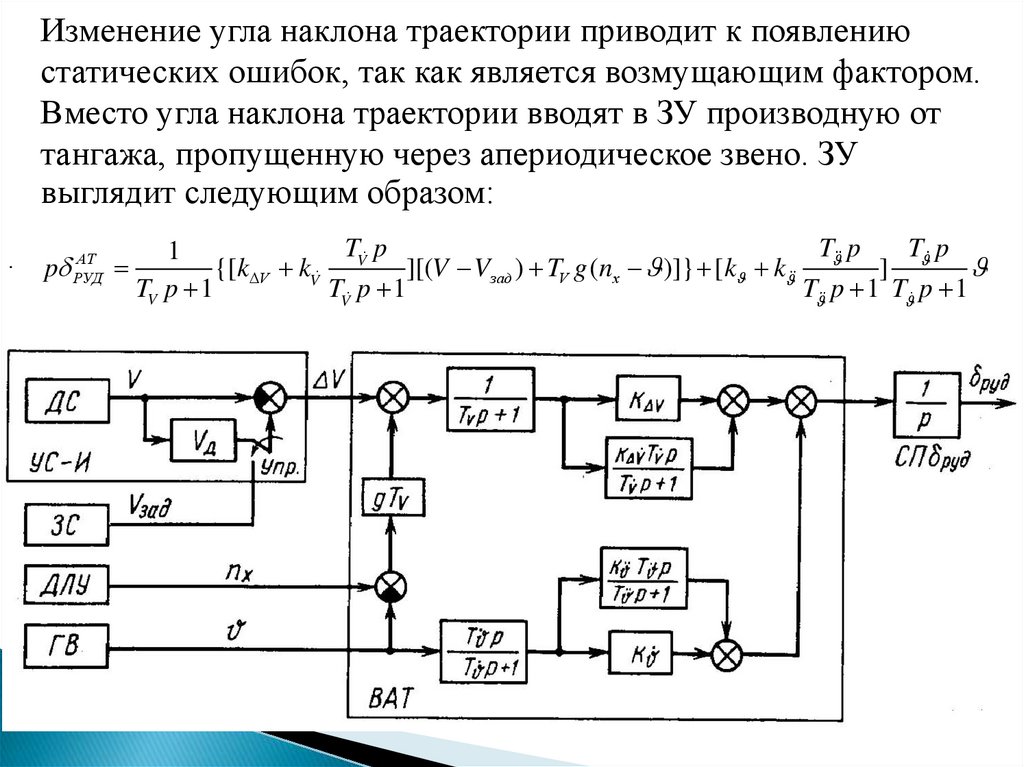
18.
Изменение угла наклона траектории приводит к появлениюстатических ошибок, так как является возмущающим фактором.
Вместо угла наклона траектории вводят в ЗУ производную от
тангажа, пропущенную через апериодическое звено. ЗУ
выглядит следующим образом:
.
АТ
p РУД
T p
T p
T p
1
{[k V kV V ][(V Vзад ) TV g (nx )]} [k k ]
TV p 1
TV p 1
T p 1 T p 1
19.
2.19. Цифроаналоговые автоматы тяги.Общим недостатком современных аналоговых автоматов
тяги является их неблагоприятное влияние на двигатели,
выражающееся в слишком большом числе управляющих
воздействий и приводящее к их преждевременному износу.
Это объясняется тем, что регулирование сравнительно
медленного контура скорости осуществляется через
быстрый в управлении двигатель. Современные цифроаналоговые автоматы тяги позволяют уменьшить число
воздействий на двигатели и повысить качество управления
скоростью.
20.
21.
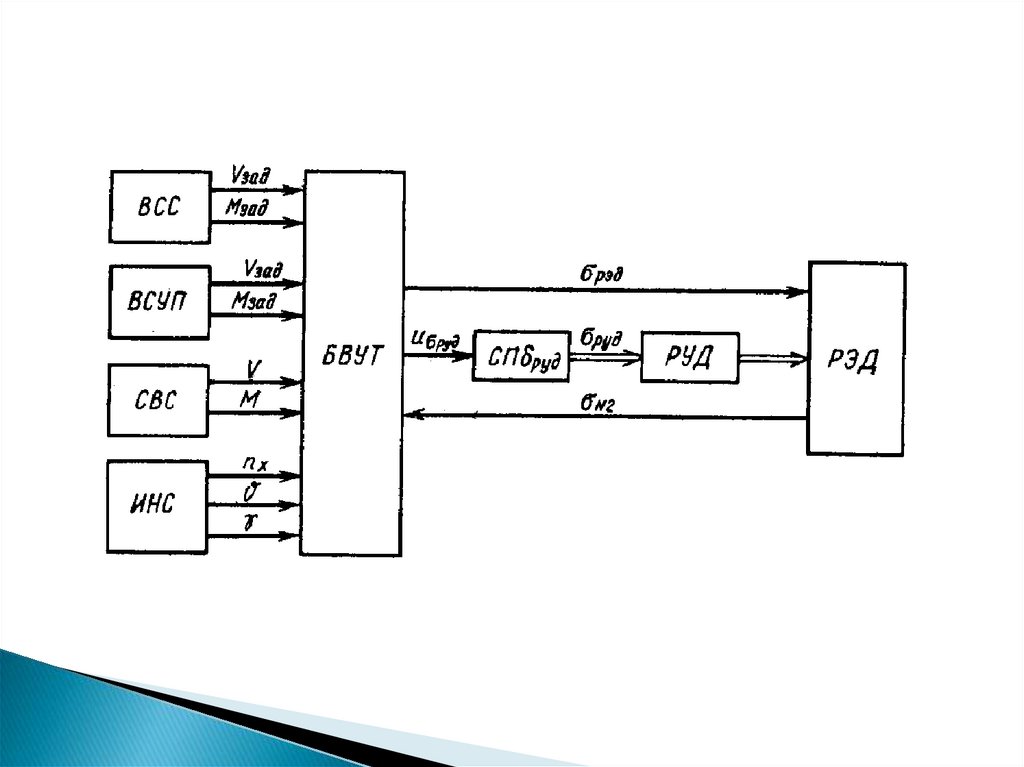
В цифроаналоговом AT управление может вестись в различныхрежимах:
в крейсерском полете - по сигналам навигационного вычислителя
- вычислительной системы самолетовождения ВСС. При этом
реализуются режимы стабилизации и управления скоростью или
числом М полета, вертикальной навигации, стабилизации и
управления вертикальной скоростью, выхода на заданный эшелон.
При заходе на посадку, посадке, а также в крейсерском полете при
отказе вычислительной системы самолетовождения управление
ведется по сигналам вычислительной системы управления полетом
ВСУП. При этом реализуются режимы стабилизации и управления
скоростью или числом М полета, ухода на 2-й круг и «сброс газа».
Сигналы, пропорциональные заданным значениям скорости и числа
М, подаются из ВСС и ВСУП в вычислительный блок управления
тягой БВУТ в виде последовательного биполярного кода.
22.
В качестве датчиков текущих значений пилотажных параметровиспользуются цифровая система воздушных сигналов СВС и
инерциальная навигационная система ИНС
Эти системы выдают в вычислительный блок управления тягой
БВУТ сигналы, пропорциональные текущим значениям скорости,
числа М , тангажа , крена и перегрузки n x
Кроме того, автомат тяги имеет собственный режим стабилизации
числа оборотов 2-й ступени компрессора. Информация о текущих
N2
оборотах 2-й ступени
поступает с электронного регулятора
двигателей РЭД.
Стабилизация и управление скоростью или числом М осуществляется
путем определения рассогласования между текущими и требуемыми
значениями этих параметров и вычисления потребного количества
оборотов компрессора высокого давления N 2
23.
Воздействие на двигатель осуществляется через два контура:грубый - аналоговый и точный - цифровой. Первый контур
реализует воздействие через аналоговый сервопривод СП РУД на
рычаги управления двигателями и электронный регулятор
двигателя. Этот контур не позволяет с большой точностью
выставить заданное число оборотов. Поэтому применяется
цифровой корректирующий контур с непосредственным
воздействием на РЭД, т. е. AT сначала по грубому каналу
перемещает РУД, а затем по точному каналу корректирует
управление. Таким образом, контур управления через РУД
является внешним и замыкается через двигатели и динамику
самолета, а контур управления через РЭД - внутренний и
замыкается только через двигатели.
24.
Аналоговый сервопривод AT состоит из электронногоблока управления привода регулирования тяги (БУПРТ) и
электромеханического регулятора тяги (МРТ). Кроме
перечисленных сигналов БВУТ получает разовые
команды с концевых выключателей двигателей («Малый
газ» и «Взлетный газ»), с концевиков секторов газа, от
стоп-кранов
перекрытия
топлива
и
концевых
выключателей шасси.