
 industry
industrySimilar presentations:






 в авиации")



Автоматическое управление скоростью и числом М. Лекция 7
1.
Тема 2.3 Автоматическая стабилизация и управление скоростью полета и числом Мна маршруте
Лекция 7. Автоматическое управление скоростью и числом М
Вопросы:
2.13. Виды скоростей, способы управления скоростей полета самолета.
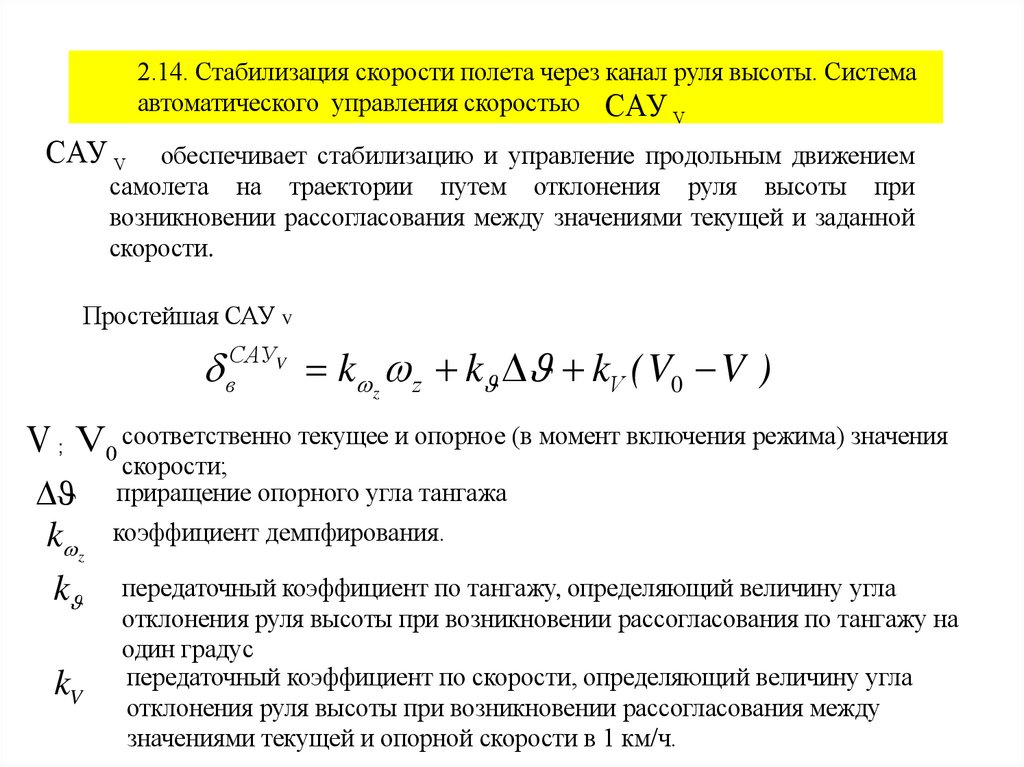
2.14. Стабилизация скорости полета через канал руля высоты. Система
автоматического управления скоростью
2.15. Система автоматического управления числом М полета
2.16. Особенности законов управления.
Литература:
1.__[1]__стр._378-381
2.
Тема 2.3 Автоматическая стабилизация и управление скоростью полета и числом Мна маршруте
Лекция 7. Автоматическое управление скоростью и числом М
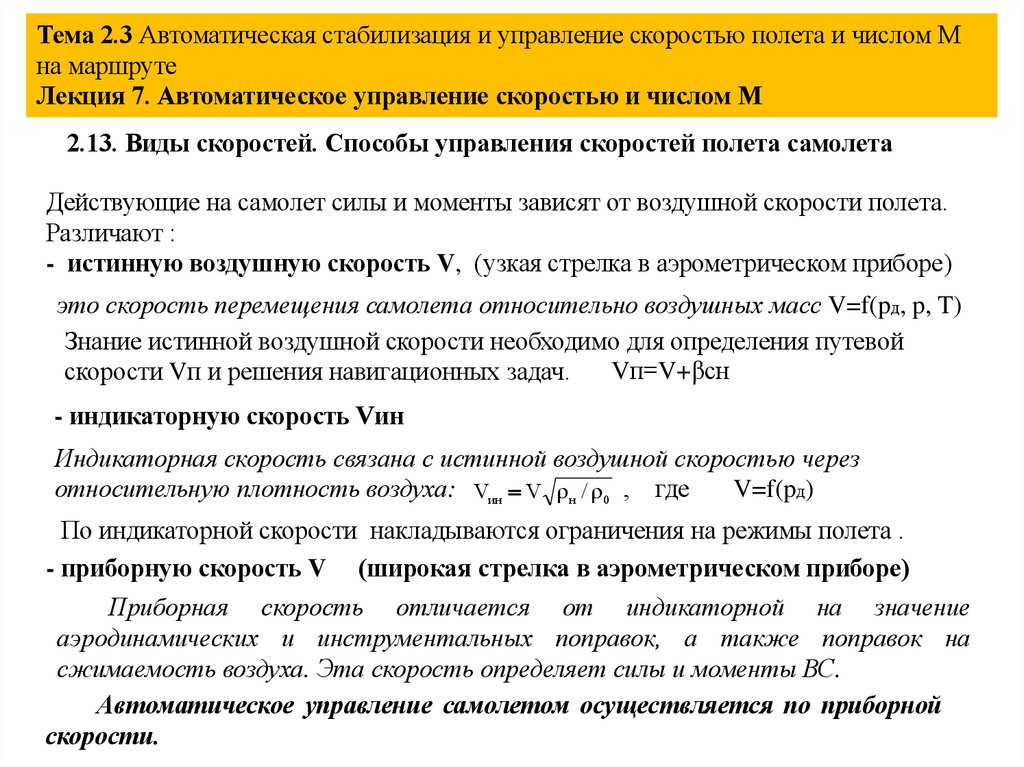
2.13. Виды скоростей. Способы управления скоростей полета самолета
Действующие на самолет силы и моменты зависят от воздушной скорости полета.
Различают :
- истинную воздушную скорость V, (узкая стрелка в аэрометрическом приборе)
это скорость перемещения самолета относительно воздушных масс V=f(pд, p, T)
Знание истинной воздушной скорости необходимо для определения путевой
Vп=V+βсн
скорости Vп и решения навигационных задач.
- индикаторную скорость Vин
Индикаторная скорость связана с истинной воздушной скоростью через
относительную плотность воздуха: Vин V н / 0 , где
V=f(pд)
По индикаторной скорости накладываются ограничения на режимы полета .
- приборную скорость V (широкая стрелка в аэрометрическом приборе)
Приборная скорость отличается от индикаторной на значение
аэродинамических и инструментальных поправок, а также поправок на
сжимаемость воздуха. Эта скорость определяет силы и моменты ВС.
Автоматическое управление самолетом осуществляется по приборной
скорости.
3.
Управление скоростью полета в основном осуществлялось через контурручного управления, так как сравнительно медленный характер изменения
скорости не вызывает затруднений у пилота.
Повышение требований к экономичности полета и точности выдерживания
скорости на наиболее напряженных этапах полета привели к необходимости
автоматической стабилизации и управления скоростью полета.
Различают следующие основные режимы полета: максимальной крейсерской
скорости, максимальной дальности, экономический крейсерский режим.
Выполнение этих режимов связано с управлением скоростью полета самолета.
К факторам, влияющим на режимы крейсерского полета, относятся высота
эшелона, температура наружного воздуха, направление и скорость ветра.
Благоприятное влияние автоматики на процесс управления полетом
проявляется в улучшении качества переходных процессов возвращения самолета к
требуемой скорости или требуемому числу М после непроизвольного отклонения
под действием внешних возмущений. Так осуществляется автоматическая
стабилизация скорости и числа М при наборе высоты, крейсерском полете и
снижении.
4.
Самолет как объект управления, как правило, обладает статическойустойчивостью в продольном траекторном движении по скорости при действии
внешних возмущений. Однако возвращение самолета к исходному режиму по
скорости может сопровождаться значительными статическими ошибками и
существенной колебательностью. Кроме того, условиями эксплуатации самолета
скорость ограничивается по максимуму и минимуму. Поэтому при полете на
режимах, близких к граничным, скорость должна строго контролироваться.
При ручном пилотировании задачи стабилизации и контроля за скоростью
решает пилот. Он наблюдает за изменением скорости по указателю и,
воздействуя на органы управления самолетом таким образом, чтобы самолет
удерживал требуемую скорость или изменял ее соответствующим образом.
На наиболее сложных участках требуется более точнее выдерживать
скорость полета. Например при заходе на посадку пассажирского лайнера
превышение скорости на 3 м/с приводит к увеличению посадочной дистанции.
Системы автоматического управления скоростью служат для освобождения
пилота от решения этой задачи и повышения качества и безопасности посадки.
5.
Существуют два основных способа управления скоростью и числом М:воздействием на руль высоты и на тягу двигателей.
В первом случае изменение наклона траектории осуществляется путем
изменения аэродинамической подъемной силы и силы лобового сопротивления,
а во втором случае - изменением тяги.
Следует сказать, что управление скоростью совсем не простая задача. Она
критична к изменяющимся свойствам самолета и среды.
Более перспективными являются способы управления, основанные на
текущей идентификации параметров самолета и
методах оптимального
управления на основе минимизации некоторого функционала, при которых
возможно рациональное воздействие на руль высоты и РУД , с целью
достижения требуемого продольного траекторного движения.
6.
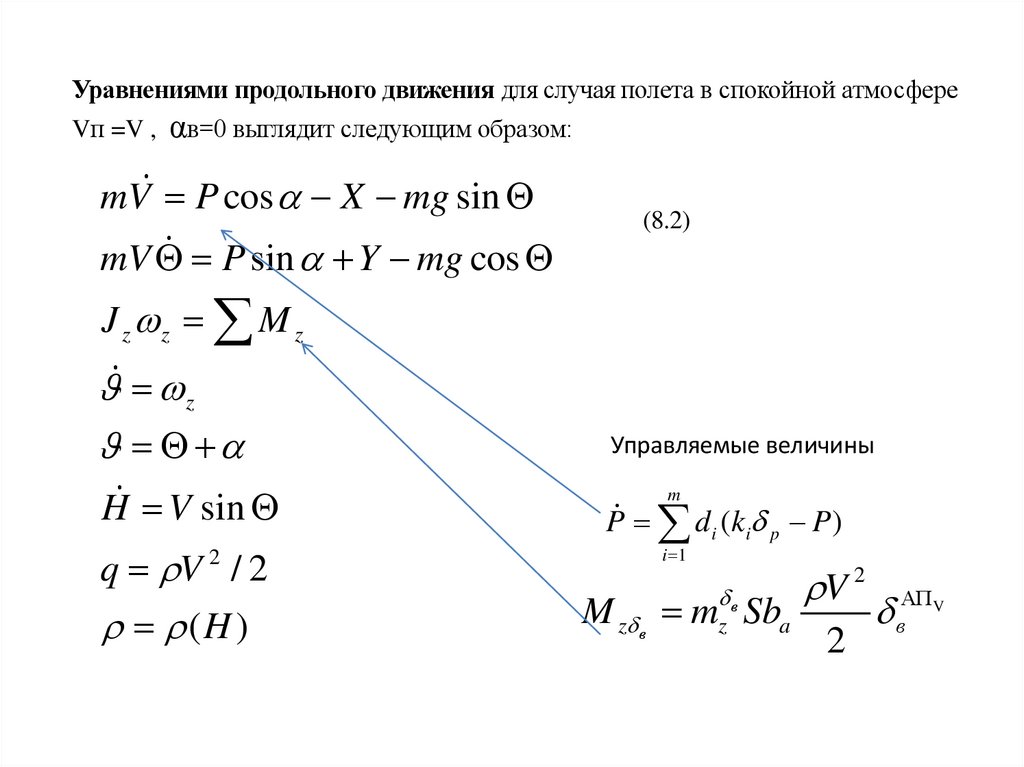
Уравнениями продольного движения для случая полета в спокойной атмосфереVп =V , αв=0 выглядит следующим образом:
mV P cos X mg sin
mV P sin Y mg cos
(8.2)
J z z M z
z
H V sin
q V / 2
(H )
2
Управляемые величины
m
P d i ( ki p P )
i 1
M z в m z в Sba
V 2
2
вАП
V
7.
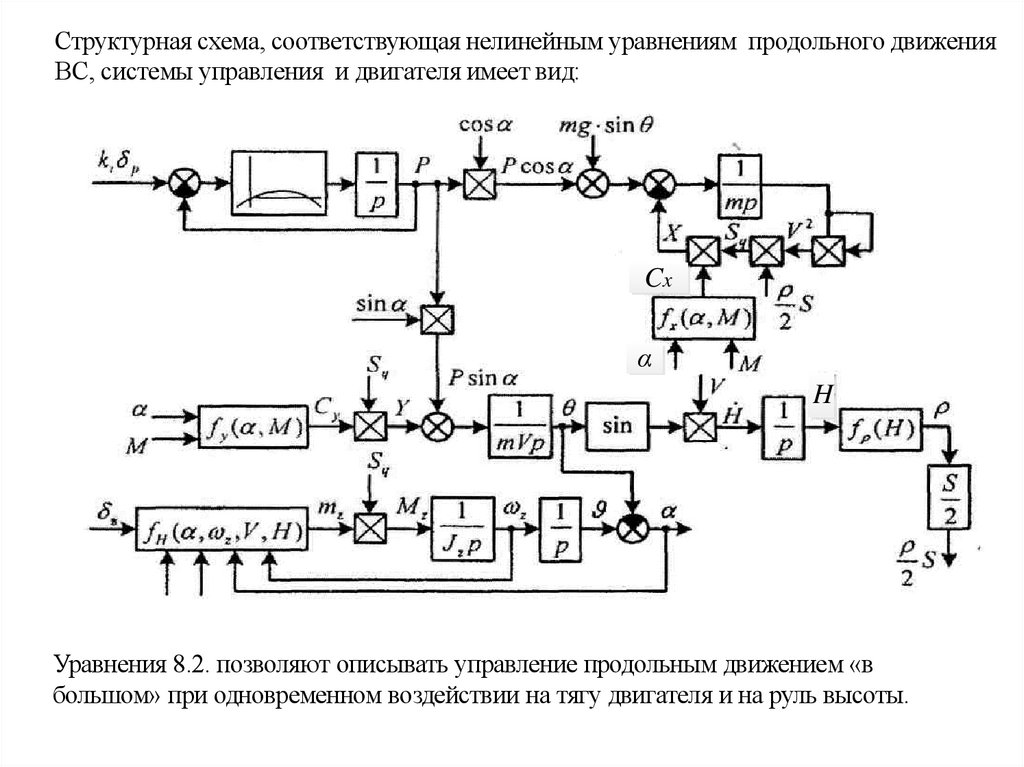
Структурная схема, соответствующая нелинейным уравнениям продольного движенияВС, системы управления и двигателя имеет вид:
Cx
α
H
Уравнения 8.2. позволяют описывать управление продольным движением «в
большом» при одновременном воздействии на тягу двигателя и на руль высоты.
8.
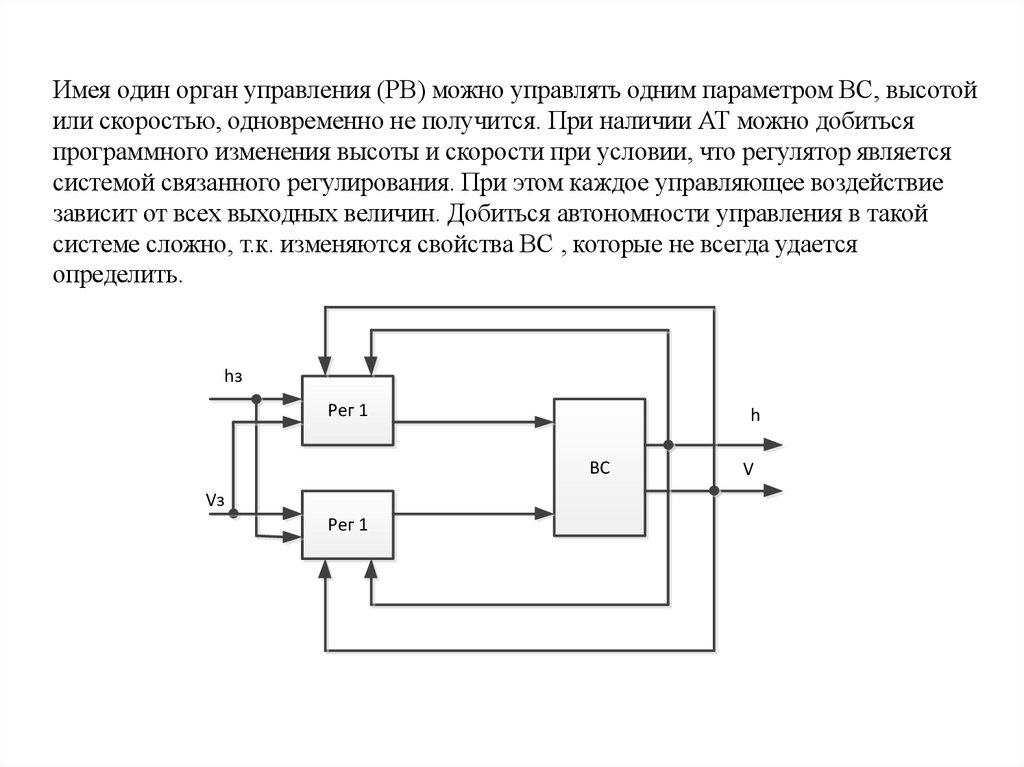
Имея один орган управления (РВ) можно управлять одним параметром ВС, высотойили скоростью, одновременно не получится. При наличии АТ можно добиться
программного изменения высоты и скорости при условии, что регулятор является
системой связанного регулирования. При этом каждое управляющее воздействие
зависит от всех выходных величин. Добиться автономности управления в такой
системе сложно, т.к. изменяются свойства ВС , которые не всегда удается
определить.
hз
Рег 1
h
ВС
Vз
Рег 1
V
9.
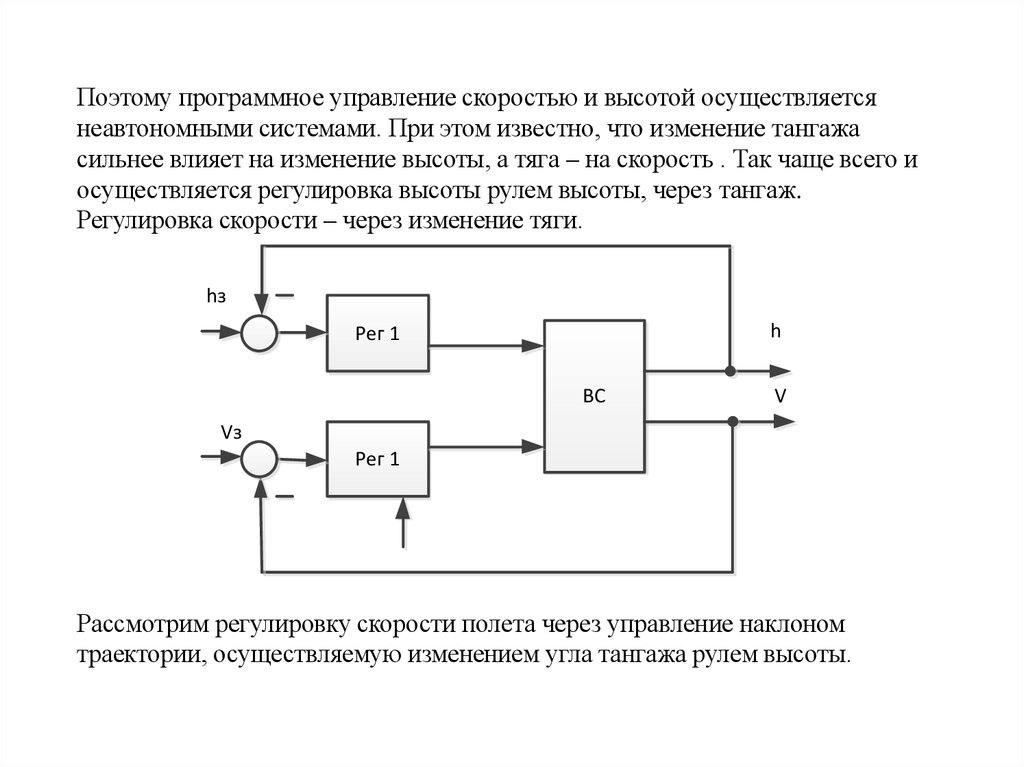
Поэтому программное управление скоростью и высотой осуществляетсянеавтономными системами. При этом известно, что изменение тангажа
сильнее влияет на изменение высоты, а тяга – на скорость . Так чаще всего и
осуществляется регулировка высоты рулем высоты, через тангаж.
Регулировка скорости – через изменение тяги.
hз
h
Рег 1
ВС
V
Vз
Рег 1
Рассмотрим регулировку скорости полета через управление наклоном
траектории, осуществляемую изменением угла тангажа рулем высоты.
10.
2.14. Стабилизация скорости полета через канал руля высоты. Системаавтоматического управления скоростью САУ V
САУ V
обеспечивает стабилизацию и управление продольным движением
самолета на траектории путем отклонения руля высоты при
возникновении рассогласования между значениями текущей и заданной
скорости.
Простейшая САУ V
САУV
в
k z z k kV (V0 V )
V ; V0 соответственно текущее и опорное (в момент включения режима) значения
k z
k
kV
скорости;
приращение опорного угла тангажа
коэффициент демпфирования.
передаточный коэффициент по тангажу, определяющий величину угла
отклонения руля высоты при возникновении рассогласования по тангажу на
один градус
передаточный коэффициент по скорости, определяющий величину угла
отклонения руля высоты при возникновении рассогласования между
значениями текущей и опорной скорости в 1 км/ч.
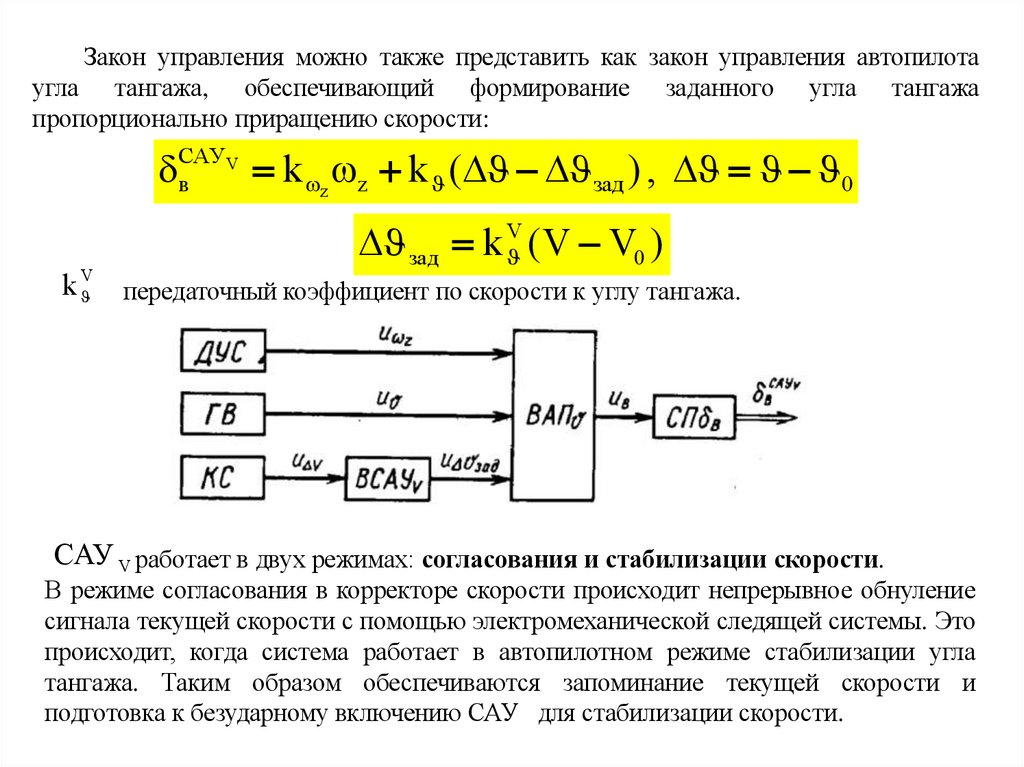
11.
Закон управления можно также представить как закон управления автопилотаугла тангажа, обеспечивающий формирование заданного угла тангажа
пропорционально приращению скорости:
САУV
в
k z z k ( зад ) , 0
зад k (V V0 )
V
k V передаточный коэффициент по скорости к углу тангажа.
САУ V работает в двух режимах: согласования и стабилизации скорости.
В режиме согласования в корректоре скорости происходит непрерывное обнуление
сигнала текущей скорости с помощью электромеханической следящей системы. Это
происходит, когда система работает в автопилотном режиме стабилизации угла
тангажа. Таким образом обеспечиваются запоминание текущей скорости и
подготовка к безударному включению САУ для стабилизации скорости.
12.
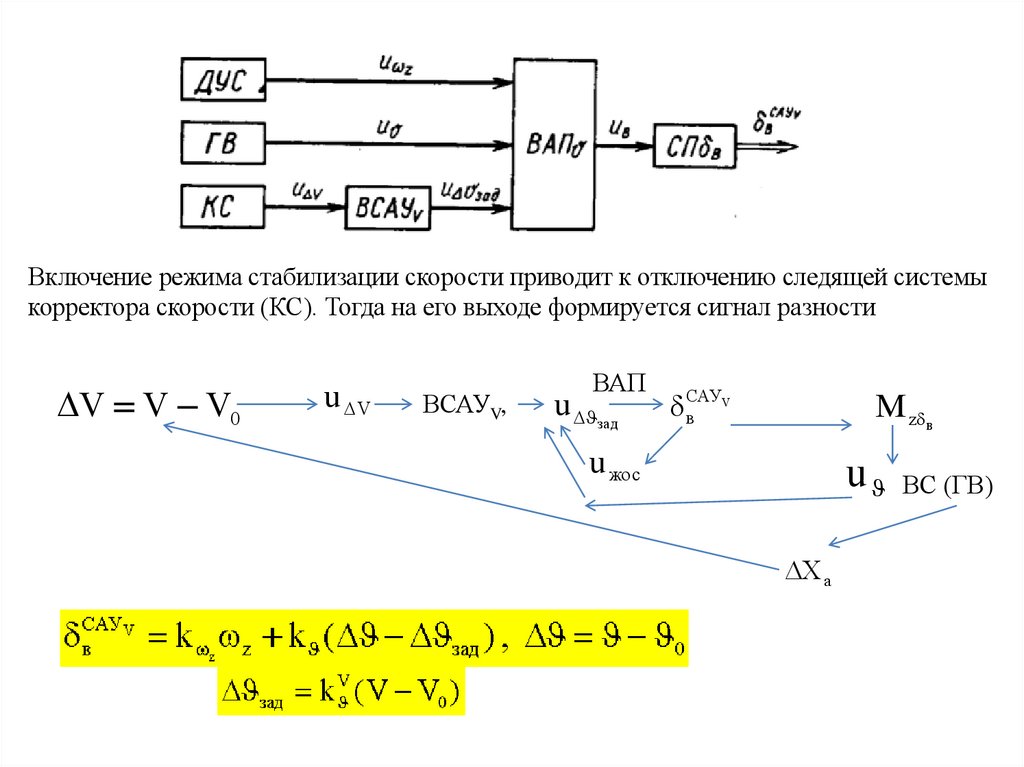
Включение режима стабилизации скорости приводит к отключению следящей системыкорректора скорости (КС). Тогда на его выходе формируется сигнал разности
V V V0
u V
ВСАУV,
ВАП
u зад
V
САУ
в
М z в
u жос
u ВС (ГВ)
a
13.
2.15. Система автоматического управления числом М полета(САУМ)
Оптимальное управление самолетом на маршруте связано с минимизацией
удельного километрового расхода топлива, который зависит от условий полета, и
прежде всего от температуры воздуха T .
С изменением температуры воздуха меняется удельный расход топлива и число
М вследствие изменения скорости звука.
Поэтому оказывается целесообразным задавать удельный расход топлива в
функции числа М и выдерживать в полете заданное число М, а не воздушную
скорость. Тогда удельный расход топлива и режим работы двигателей остаются
неизменными при изменении температуры. Воздушная скорость при этом является
переменной.
САУМ обеспечивает стабилизацию и управление продольным движением
самолета на заключительном этапе набора высоты, крейсерском полете по
маршруту и начальном этапе снижения путем отклонения руля высоты при
возникновении рассогласования между значениями текущего и заданного числа М
полета.
вСАУ k z k kV ( M 0 M )
M
z
Отличие заключается в том, что в качестве датчика рассогласования между
значениями текущего и опорного числа М используется корректор числа М (КМ).
14.
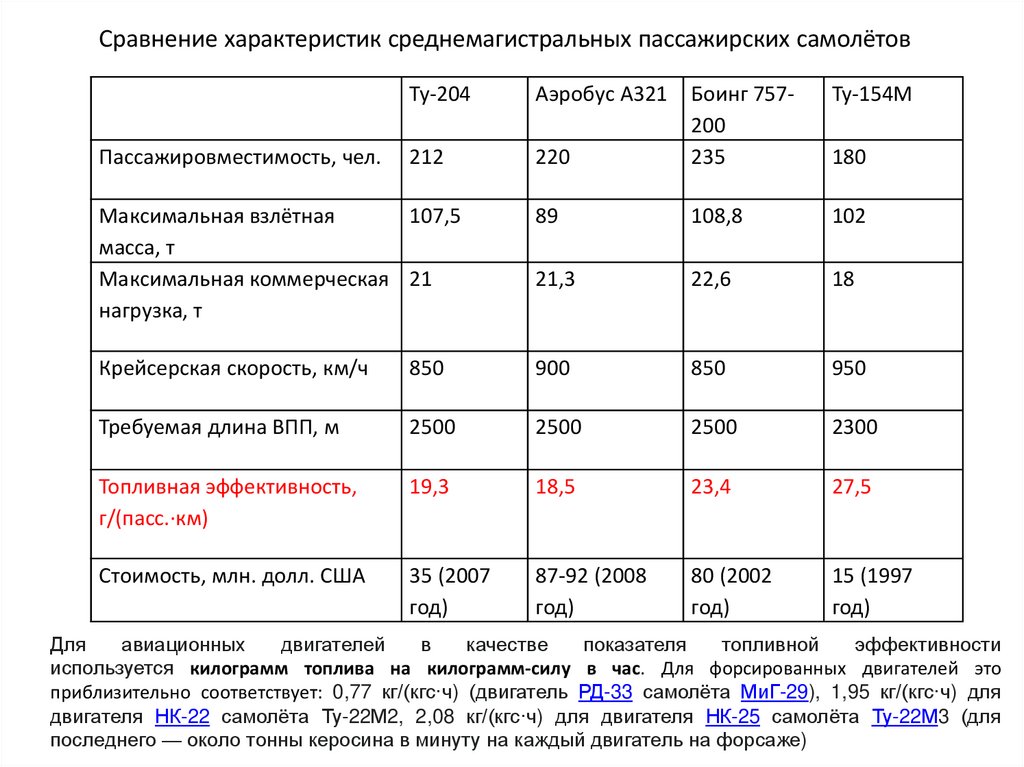
Сравнение характеристик среднемагистральных пассажирских самолётовТу-154М
220
Боинг 757200
235
Максимальная взлётная
107,5
масса, т
Максимальная коммерческая 21
нагрузка, т
89
108,8
102
21,3
22,6
18
Крейсерская скорость, км/ч
850
900
850
950
Требуемая длина ВПП, м
2500
2500
2500
2300
Топливная эффективность,
г/(пасс.·км)
19,3
18,5
23,4
27,5
Стоимость, млн. долл. США
35 (2007
год)
87-92 (2008
год)
80 (2002
год)
15 (1997
год)
Пассажировместимость, чел.
Ту-204
Аэробус A321
212
180
Для
авиационных
двигателей
в
качестве
показателя
топливной
эффективности
используется килограмм топлива на килограмм-силу в час. Для форсированных двигателей это
приблизительно соответствует: 0,77 кг/(кгс·ч) (двигатель РД-33 самолёта МиГ-29), 1,95 кг/(кгс·ч) для
двигателя НК-22 самолёта Ту-22М2, 2,08 кг/(кгс·ч) для двигателя НК-25 самолёта Ту-22М3 (для
последнего — около тонны керосина в минуту на каждый двигатель на форсаже)
15.
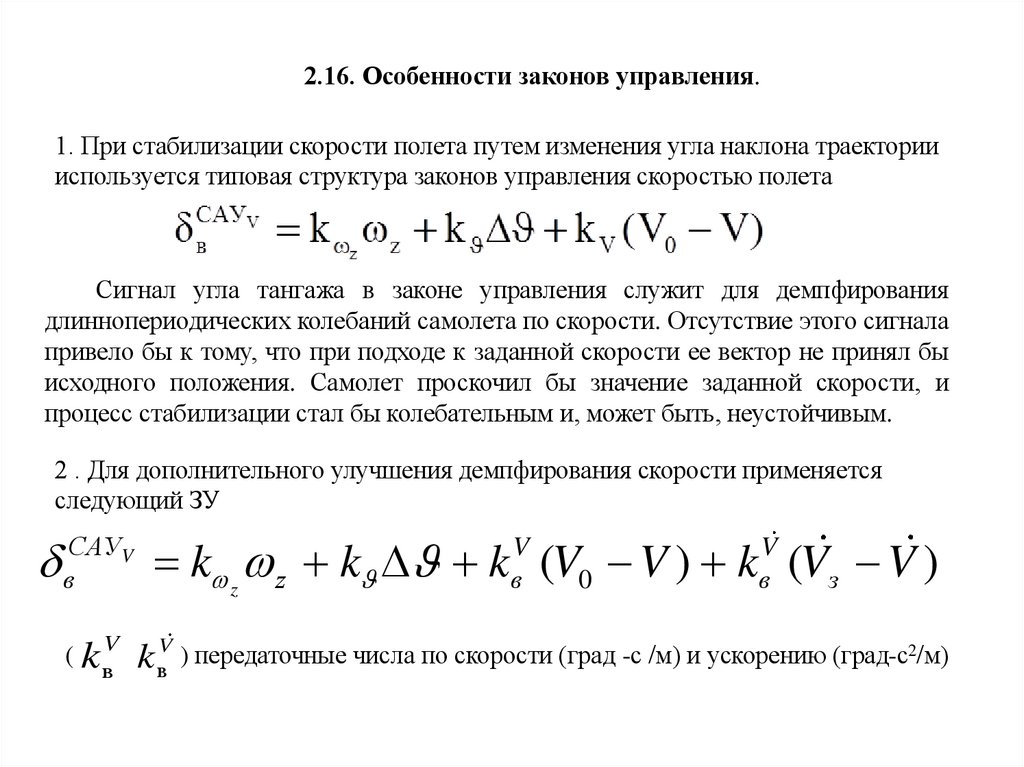
2.16. Особенности законов управления.1. При стабилизации скорости полета путем изменения угла наклона траектории
используется типовая структура законов управления скоростью полета
Сигнал угла тангажа в законе управления служит для демпфирования
длиннопериодических колебаний самолета по скорости. Отсутствие этого сигнала
привело бы к тому, что при подходе к заданной скорости ее вектор не принял бы
исходного положения. Самолет проскочил бы значение заданной скорости, и
процесс стабилизации стал бы колебательным и, может быть, неустойчивым.
2 . Для дополнительного улучшения демпфирования скорости применяется
следующий ЗУ
САУV
в
k z z k k (V0 V ) k (Vз V )
V
в
V
в
( k V k V ) передаточные числа по скорости (град -с /м) и ускорению (град-с2/м)
в
в
16.
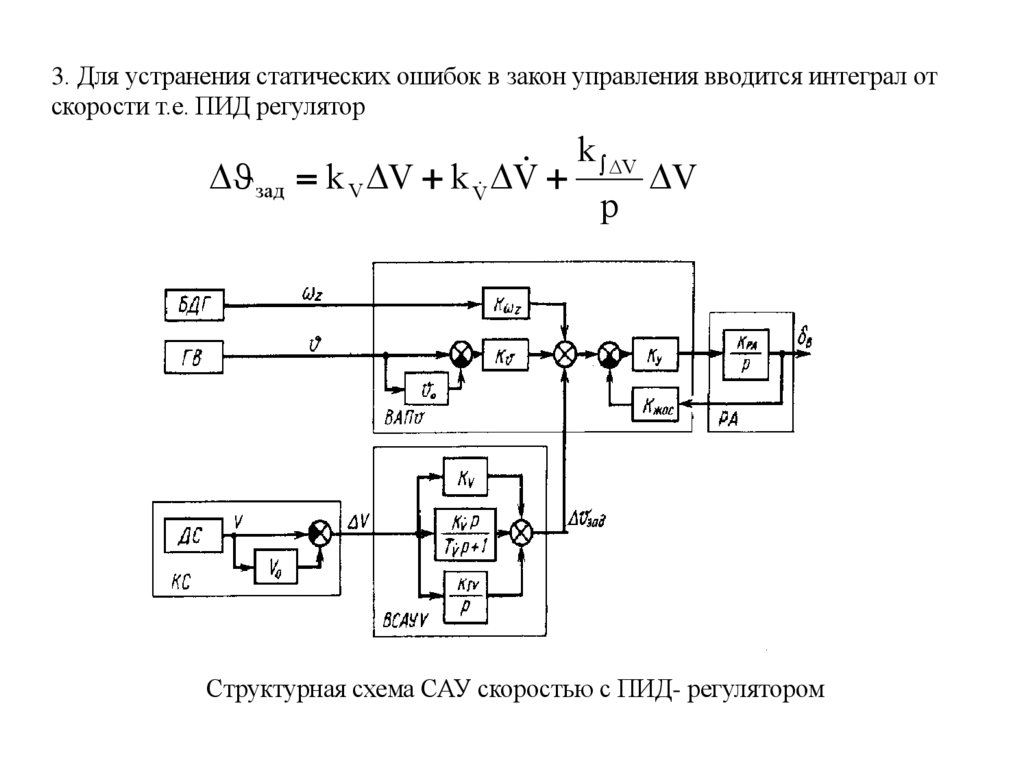
3. Для устранения статических ошибок в закон управления вводится интеграл отскорости т.е. ПИД регулятор
зад k V V k V V
k V
p
V
Структурная схема САУ скоростью с ПИД- регулятором
17.
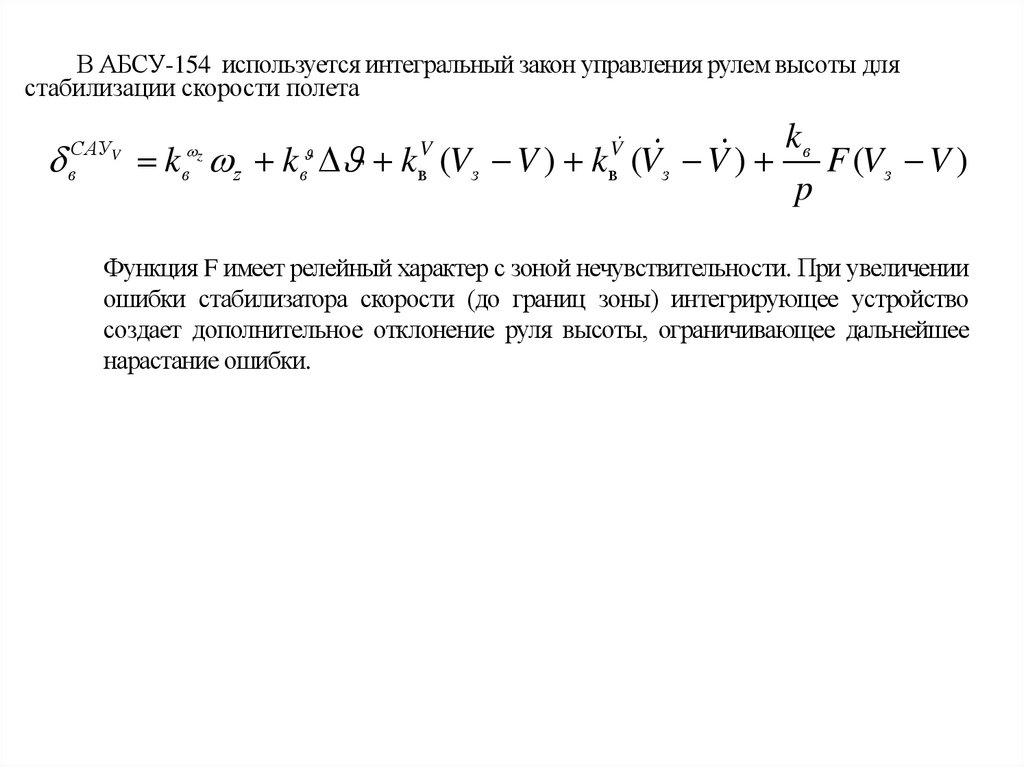
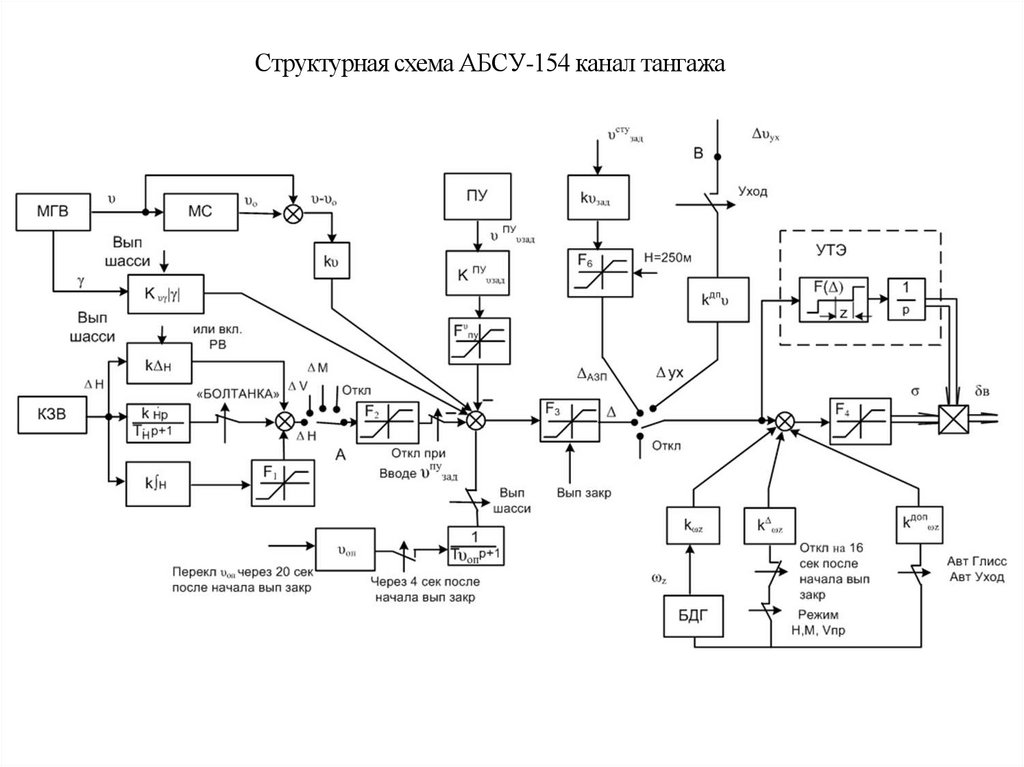
В АБСУ-154 используется интегральный закон управления рулем высоты длястабилизации скорости полета
САУV
в
kв
kв z kв k (Vз V ) k (Vз V ) F (Vз V )
p
z
V
в
V
в
Функция F имеет релейный характер с зоной нечувствительности. При увеличении
ошибки стабилизатора скорости (до границ зоны) интегрирующее устройство
создает дополнительное отклонение руля высоты, ограничивающее дальнейшее
нарастание ошибки.