 industry
industrySimilar presentations:










Автоматическая стабилизация и управление боковым траекторным движением. Тема 2.2
1.
Тема 2.2. Автоматическая стабилизация и управление боковымтраекторным движением.
2.9 Система автоматического управления отклонением от азимута (САУ А)
2.10. Система автоматического управления путевым углом САУ пу
2.11. Система автоматического управления линейным боковым отклонением от ЛЗП
САУ z
2.12. Особенности законов управления
2.
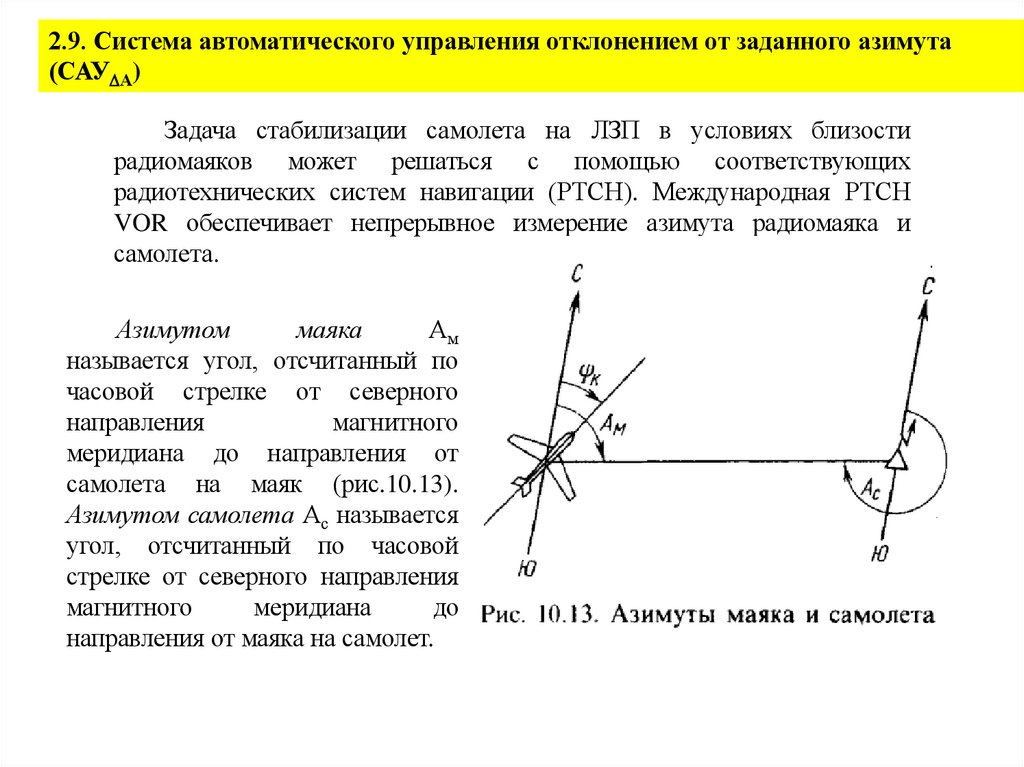
2.9. Система автоматического управления отклонением от заданного азимута(САУ А)
Задача стабилизации самолета на ЛЗП в условиях близости
радиомаяков может решаться с помощью соответствующих
радиотехнических систем навигации (РТСН). Международная РТСН
VOR обеспечивает непрерывное измерение азимута радиомаяка и
самолета.
Азимутом
маяка
Ам
называется угол, отсчитанный по
часовой стрелке от северного
направления
магнитного
меридиана до направления от
самолета на маяк (рис.10.13).
Азимутом самолета Ас называется
угол, отсчитанный по часовой
стрелке от северного направления
магнитного
меридиана
до
направления от маяка на самолет.
3.
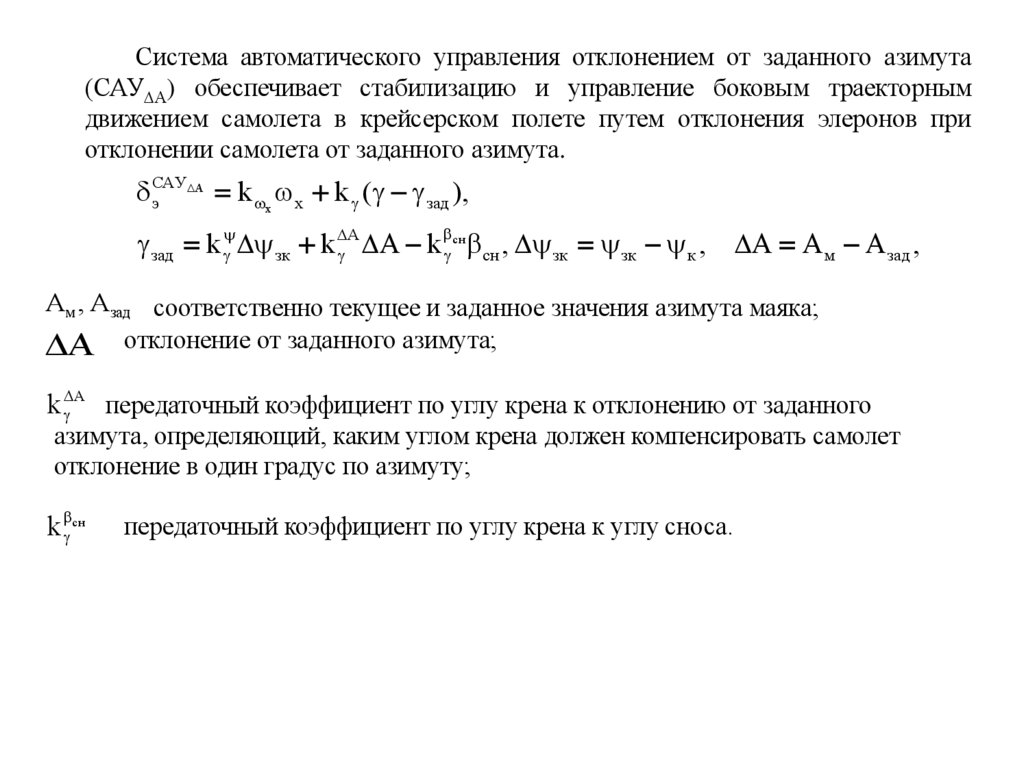
Система автоматического управления отклонением от заданного азимута(САУ А) обеспечивает стабилизацию и управление боковым траекторным
движением самолета в крейсерском полете путем отклонения элеронов при
отклонении самолета от заданного азимута.
А
САУ
k x x k ( зад ),
э
зад k зк k А А k сн сн , зк зк к , А А м А зад ,
Ам , А зад соответственно текущее и заданное значения азимута маяка;
А отклонение от заданного азимута;
k А передаточный коэффициент по углу крена к отклонению от заданного
азимута, определяющий, каким углом крена должен компенсировать самолет
отклонение в один градус по азимуту;
k сн
передаточный коэффициент по углу крена к углу сноса.
4.
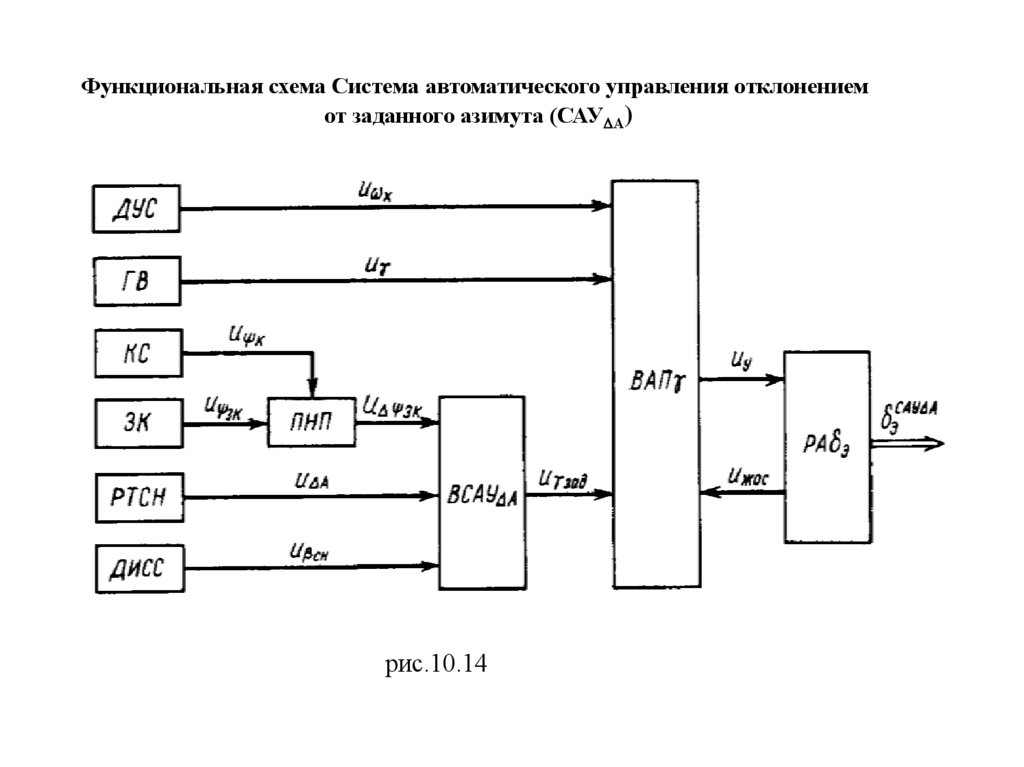
Функциональная схема Система автоматического управления отклонениемот заданного азимута (САУ А)
рис.10.14
5.
В состав электрогидравлической САУ А (рис.10.14) входят датчик угловойскорости крена ДУС, датчик угла крена – гировертикаль ГВ, датчик курса –
курсовая система КС, задатчик курса ЗК, датчик отклонения от заданного азимута
– радиотехническая система навигации РТСН, датчик угла сноса – доплеровский
измеритель скорости и угла сноса ДИСС, формирователь отклонения текущего
курса от заданного – пилотажно-навигационный прибор ПНП, формирователь
приращения заданного угла крена – вычислитель ВСАУ А, вычислитель
автопилота с сумматором и усилителем сервопривода и рулевой агрегат элеронов
РА э
Система работает следующим образом. Перед включением режима пилот
вручную с помощью задатчика курса устанавливает заданный курс, а с
помощью селектора азимута РТСН - заданный азимут линии пути. После
включения режима стабилизации заданного азимута самолет разворачивается на
заданный курс. При этом САУ А сначала работает как автопилот курса
перекрестной схемы в режиме управления заданным курсом, а затем как САУ
6.
При отклонении самолета от заданного азимута, определяющего ЛЗП,РТСН вырабатывает сигнал, пропорциональный этому отклонению u
Вычислитель ВСАУ А формирует сигнал приращения заданного угла крена
u зад
Этот сигнал отрабатывается сервоприводом элеронов, и самолет входит в крен,
пропорциональный отклонению от заданного азимута. Под действием сигнала с
гировертикали u
элероны возвращаются в нейтральное положение. Самолет
разворачивается в сторону ЛЗП пока сигнал u А c РТСН не станет равным нулю.
Тогда под действием сигнала
с гировертикали сервопривод отклоняет элероны в
обратную сторону. Самолет выходит из крена и продолжает прямолинейное
движение по ЛЗП. Сигнал u , формируемый ПНП, выполняет функции
демпфирования траекторных колебаний самолета. Сигнал u сн
с ДИСС
компенсирует действие бокового ветра и способствует управлению положением
вектора путевой скорости относительно ЛЗП.
зк
7.
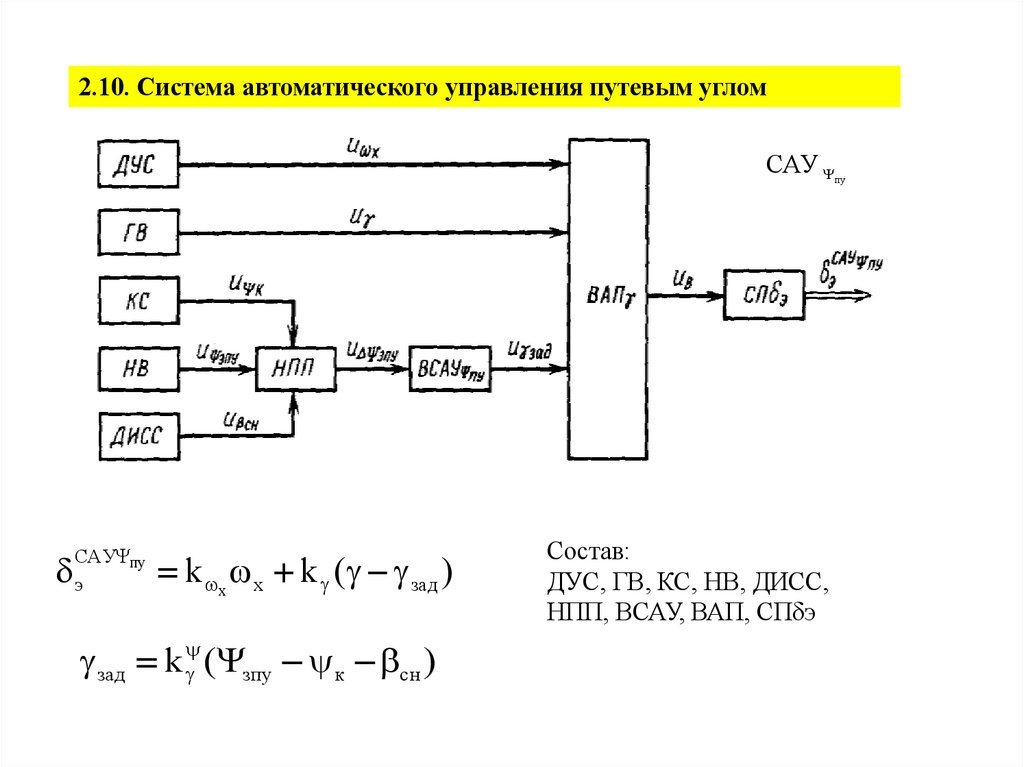
2.10. Система автоматического управления путевым угломСАУ пу
САУ пу
э
k x x k ( зад )
зад k ( зпу к сн )
Состав:
ДУС, ГВ, КС, НВ, ДИСС,
НПП, ВСАУ, ВАП, СПδэ
8.
РАБОТА.При включении навигационного вычислителя в режим полета по кратчайшему
расстоянию он начинает формировать сигнал u зпу пропорциональный
заданному путевому углу. Тогда САУ пу отрабатывает сигнал как САУ
При этом вектор путевой скорости, направленный вдоль траектории
кратчайшего расстояния, обеспечивает стабилизацию центра масс на этой
траектории.
При действии на самолет внешних возмущений он отклоняется от линии
заданного пути (ЛЗП), так как не является устойчивым в боковом траекторном
движении.
Для стабилизации самолета на ЛЗП пилот, наблюдая за изменением бокового
отклонения по прибору НПП, воздействует на баранку штурвала и отклоняет
элероны таким образом, чтобы самолет удерживался на ЛЗП или переходил с
одной ЛЗП на другую.
9.
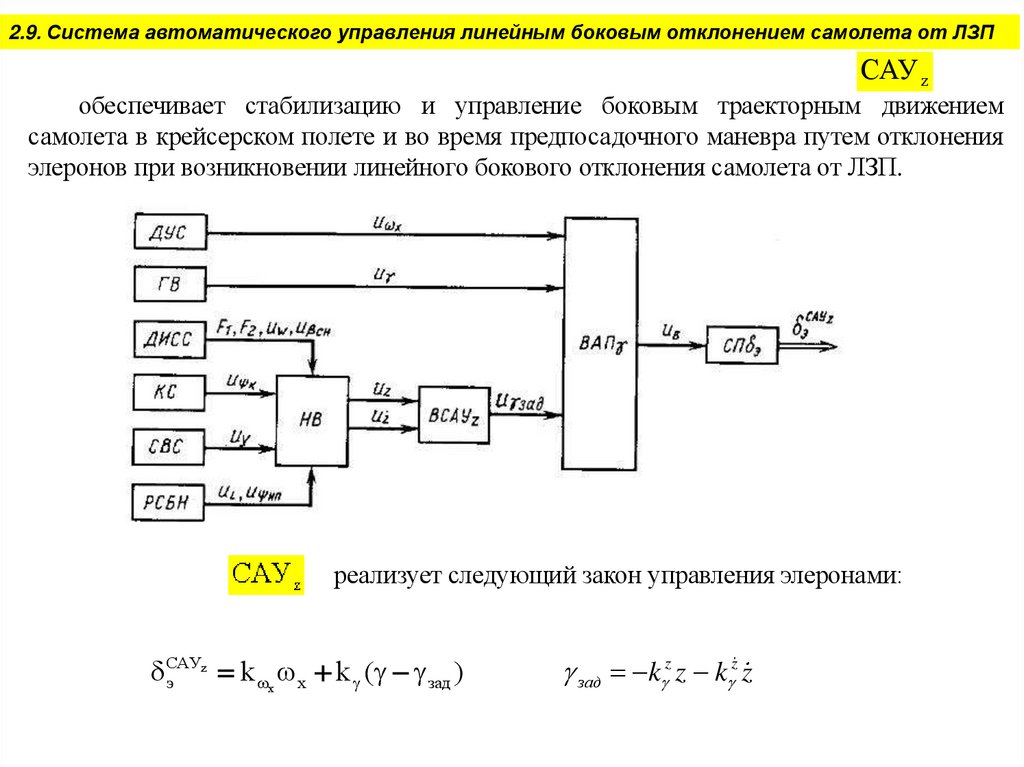
2.9. Система автоматического управления линейным боковым отклонением самолета от ЛЗПСАУ z
обеспечивает стабилизацию и управление боковым траекторным движением
самолета в крейсерском полете и во время предпосадочного маневра путем отклонения
элеронов при возникновении линейного бокового отклонения самолета от ЛЗП.
реализует следующий закон управления элеронами:
z
САУ
k x x k ( зад )
э
зад k z z k z z
10.
uω хДУС
ГВ
РМδэ
uγ
u∆γ
У
С
Д
МС
ВЫЧz
ВАП zγ
uγзад
uСОС
ТГ
uЖОС
ДОС
РТС,
ИНС
ВАПγ
СПδэ
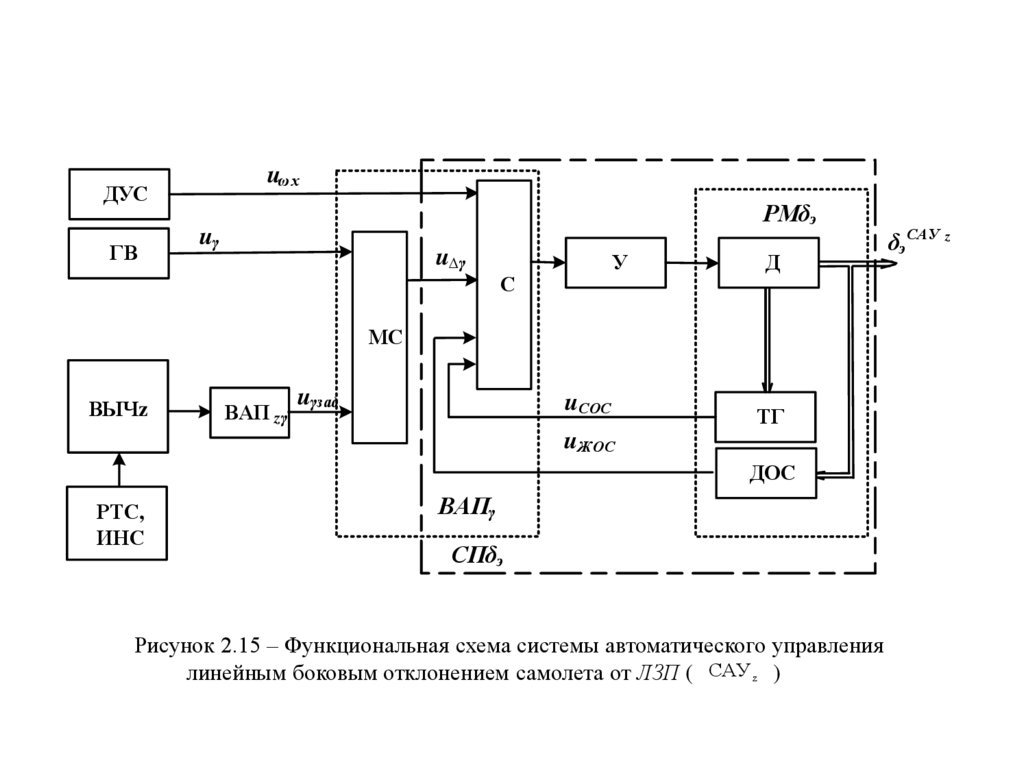
Рисунок 2.15 – Функциональная схема системы автоматического управления
линейным боковым отклонением самолета от ЛЗП ( САУ z )
δэ САУ z
11.
Для вычисления параметра z необходимо знать координаты навигационных точек(НТ) и координаты ВС. Координаты НТ задаются по и известным маршрутам
(картам) и положению НТ на Земле. Координаты ВС могут определяться двумя
способами:
1) путем непрерывного вычисления координат по данным о векторе скорости и
координатах начала движения (счисление пути);
2) путем прямого вычисления координат с помощью определения положения ЛА
относительно известных точек на земной поверхности, полей или светил
(метод линий и поверхностей положения, обзорно-сравнительный метод).
Первый способ реализуется с помощью систем счисления пути, куда входят:
– измерители направления (компасы и курсовые системы);
– измерители вектора путевой скорости (ИНС, ДИСС, СВС);
– измерители высоты (ИНС, РВ, баровысотомер).
Все расчеты выполняет, как правило, БЦВМ.
Второй способ реализуется на основе:
– методов ближней и дальней радионавигации (РСБН, РСДН);
– методов определения координат самолета путем визирования наземных
ориентиров, координаты которых известны (бортовые радиолокационные,
тепловые или оптические станции, визиры, прицелы);
– методов астронавигации (астросистемы);
– методов спутниковых радионавигационных систем;
– корреляционно-экстремальных методов навигации.
12.
Определение координат местоположения самолета методом счисления путиосновано на моделировании движения центра масс ЛА, при этом точность
определяется:
– точностью определения ускорений и скоростей;
– точностью определения курса;
– методической точностью используемого алгоритма;
– точностью вычислителей.
В ПНК с БЦВМ счисление пути осуществляется в основном в ортодромической и
этапно-ортодромической СК. При этом условная ортодромическая широта
(широта отклонения от ортодромии) не превышает нескольких десятков
километров, что позволяет упростить алгоритмы счета, перейдя к прямоугольной
СК (вычисления производятся в прямоугольной СК).
При этом движение центра масс описывается следующими уравнениями
Составляющие путевых скоростей:
Координаты:
t
t
dy
dx
y y0 Vпy dt
x x0 Vпx dt
Vпy
Vпx
dt
dt
0
0
Информация о векторе путевой скорости поступает с ИНС, ДИСС или СВС, в
зависимости от использования которых различают инерциальный, доплеровский и
воздушный режимы счисления, а также комбинированные (например,
инерциально- доплеровский).
13.
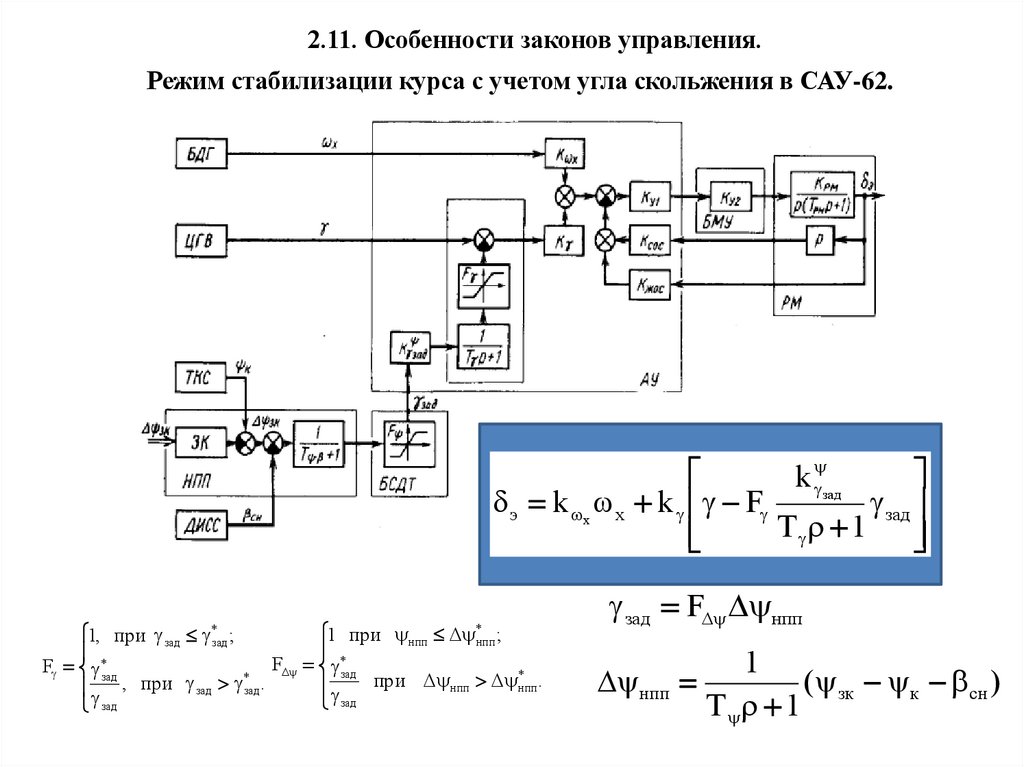
2.11. Особенности законов управления.Режим стабилизации курса с учетом угла скольжения в САУ-62.
k зад
э k x x k F
зад
Т 1
1 при нпп ;
1, при зад ;
*
*
F
F зад
зад
*
при нпп *нпп .
,
при
.
зад
зад
зад
зад
*
зад
*
нпп
зад F нпп
нпп
1
( зк к сн )
Т 1
14.
Аналогичным образом построена система САУ-86. Отличиезаключается в схеме формирования заданного курса, в
которой задатчик курса размещается на пульте управления.
В качестве датчиков угла крена и курса используются
инерциальная курсовертикаль (ИКВ) и базовая система
курса и вертикали (БСКВ).
15.
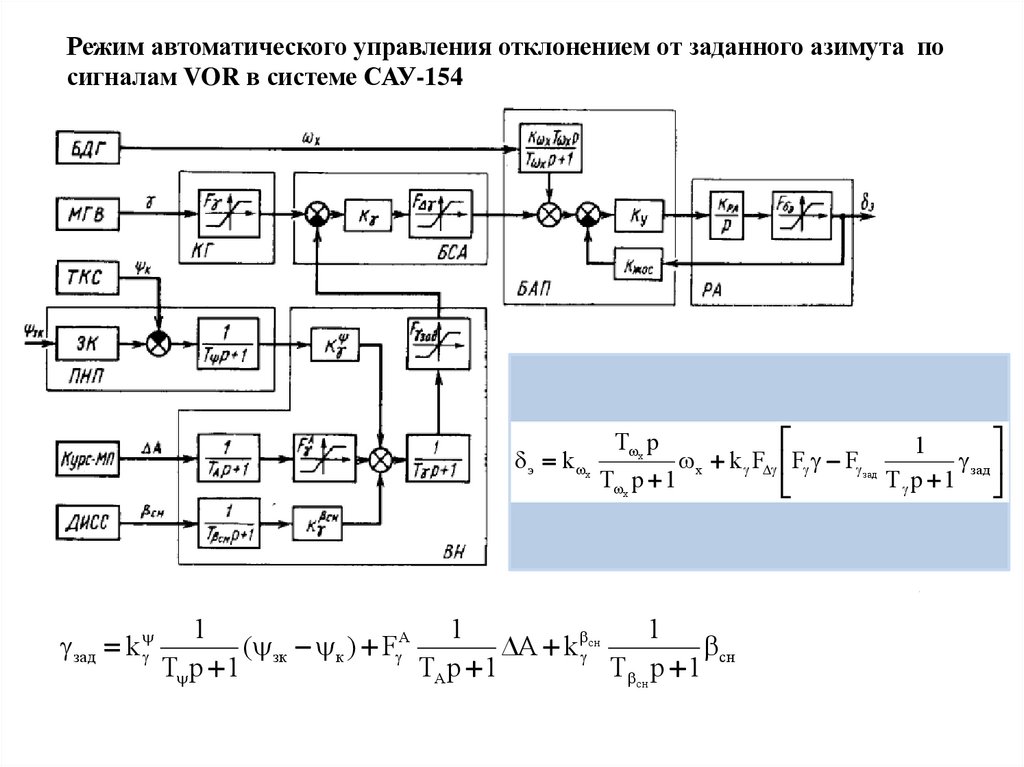
Режим автоматического управления отклонением от заданного азимута посигналам VOR в системе САУ-154
1
э k x
x k F F F зад
зад
T x p 1
Т
p
1
T x p
зад k
1
1
1
( зк к ) F A
A k сн
сн
T p 1
TA p 1
Т сн p 1
16.
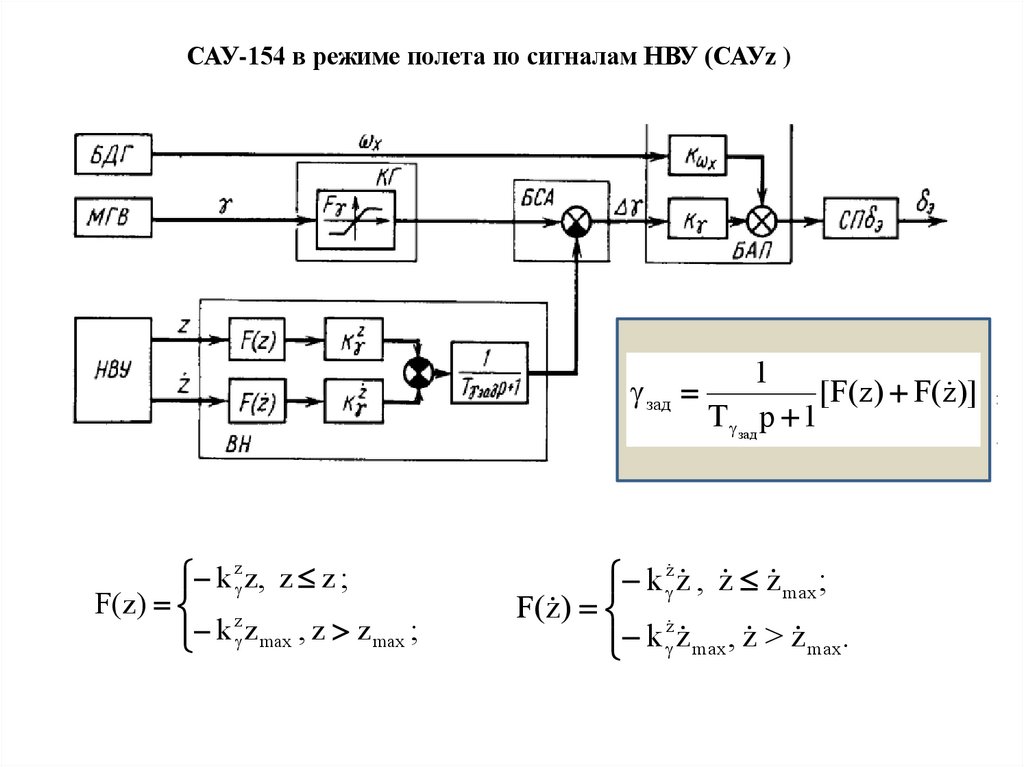
САУ-154 в режиме полета по сигналам НВУ (САУz )зад
k z z, z z ;
F(z) z
k z max , z z max ;
1
[F(z) F(z )]
Т зад p 1
k z z , z z max ;
F(z ) z
k z max , z > z max .