 industry
industrySimilar presentations:










Автоматическая стабилизация и управление курсом перекрестной схемы. Лекция 17
1.
Лекция 17. АВТОМАТИЧЕСКАЯСТАБИЛИЗАЦИЯ И УПРАВЛЕНИЕ
КУРСОМ ПЕРЕКРЕСТНОЙ СХЕМЫ
1
2.
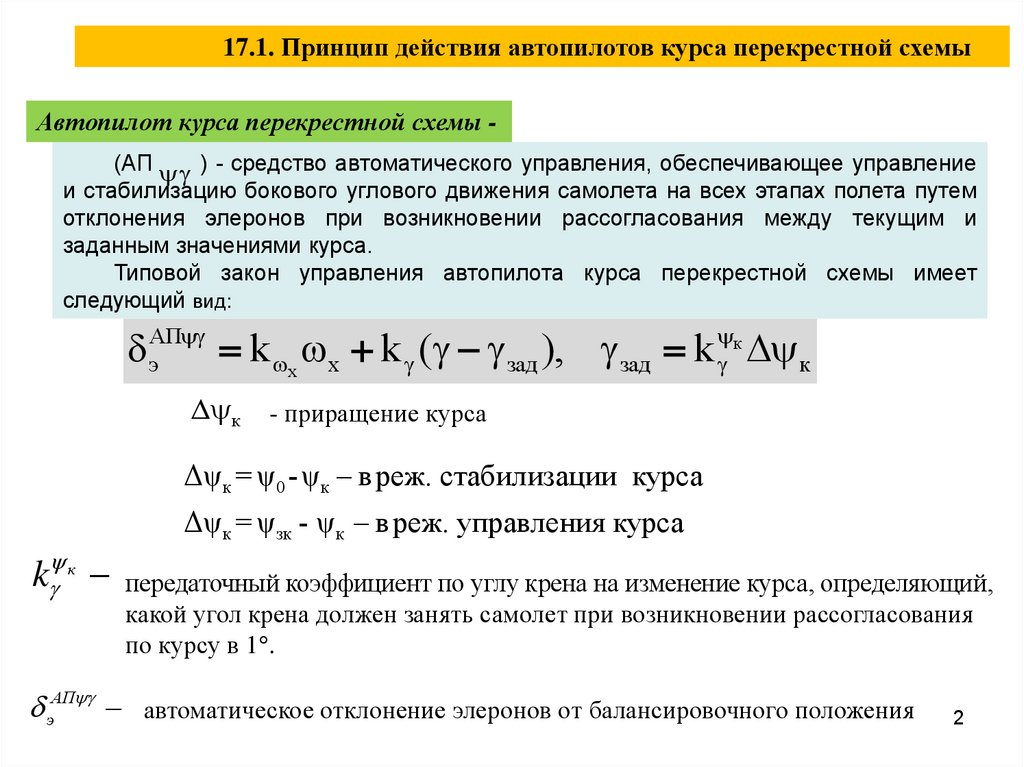
17.1. Принцип действия автопилотов курса перекрестной схемыАвтопилот курса перекрестной схемы (АП ) - средство автоматического управления, обеспечивающее управление
и стабилизацию бокового углового движения самолета на всех этапах полета путем
отклонения элеронов при возникновении рассогласования между текущим и
заданным значениями курса.
Типовой закон управления автопилота курса перекрестной схемы имеет
следующий вид:
к
АП
k
k
(
),
k
э
x x
зад
зад
к
к - приращение курса
Δψк = ψ0 -ψк в реж. стабилизации курса
Δψк = ψ зк - ψк в реж. управления курса
k к передаточный коэффициент по углу крена на изменение курса, определяющий,
какой угол крена должен занять самолет при возникновении рассогласования
по курсу в 1 .
эАП автоматическое отклонение элеронов от балансировочного положения
2
3.
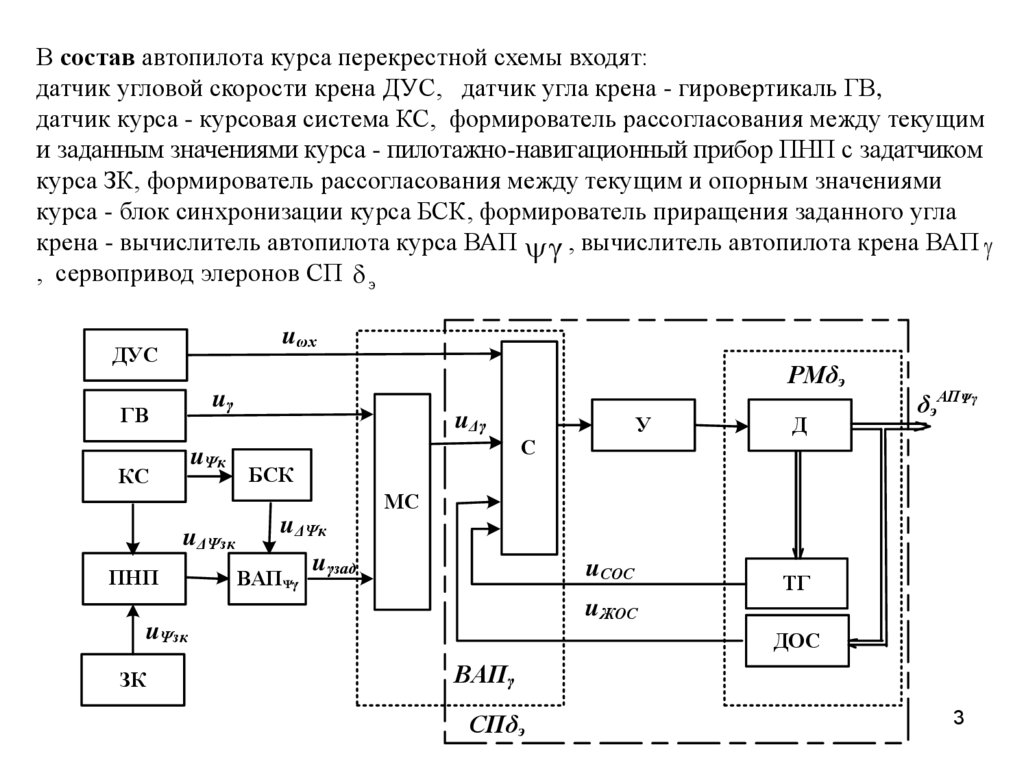
В состав автопилота курса перекрестной схемы входят:датчик угловой скорости крена ДУС, датчик угла крена - гировертикаль ГВ,
датчик курса - курсовая система КС, формирователь рассогласования между текущим
и заданным значениями курса - пилотажно-навигационный прибор ПНП с задатчиком
курса ЗК, формирователь рассогласования между текущим и опорным значениями
курса - блок синхронизации курса БСК, формирователь приращения заданного угла
крена - вычислитель автопилота курса ВАП , вычислитель автопилота крена ВАП
, сервопривод элеронов СП э
uωх
ДУС
РМδэ
uγ
ГВ
uΨк
КС
uΔγ
У
С
Д
δэАПΨγ
БСК
МС
uΔΨзк
ПНП
uΔΨк
uγзад
uСОС
ВАПΨγ
uЖОС
uΨзк
ЗК
ТГ
ДОС
ВАПγ
СПδэ
3
4.
Режимы работы : согласования, стабилизации и управления курсом.Режим согласования по текущему курсу происходит так же, как в автопилоте
курса прямой схемы, а по текущему углу крена как в автопилоте угла крена.
В режиме стабилизации сначала происходит приведение самолета к горизонту устранение рассогласования по углу крена как в автопилоте угла крена.
На вход вычислителя ВАП с БСК поступает сигнал u , пропорциональный
отклонению самолета от того курса 0 , который он имел в момент принятия
самолетом горизонтального положения.
к
Сигнал u зад, пропорциональный рассогласованию по курсу, сравнивается в механизме
согласования с сигналом текущего крена с гировертикали u и вызывает отработку
сервоприводом элеронов до тех пор, пока сигнал жесткой обратной связи
сервопривода u жос не уравновесит на входе сумматора сигнал u с механизма
согласования.
Отклонение
элеронов
вызывает
появление
управляющего
аэродинамического момента М x э , под действием которого самолет изменяет крен.
Последний изменяется до тех пор , пока сигнал с гировертикали не уравновесит сигнал
с ВАП . Сигнал на выходе МС станет равным нулю и сервопривод вернет элероны в
балансировочное положение. Самолет с креном будет разворачиваться в сторону
опорного курса. Сигнал с БСК будет уменьшаться, пока не станет равным нулю.
Соответственно будет уменьшаться до нуля сигнал с ВАП . Сигнал с МС будет
увеличиваться с обратным знаком, что вызовет отработку сервоприводом элеронов и
самолет выходит из крена. Элероны приходят в балансировочное положение.
4
5.
В режиме управления пилот, воздействуя на рукоятку задатчика курса ЗК,задает управляющий сигнал u зк . В ПНП формируется сигнал u зк
,
пропорциональный разности зк зк к .
Автопилот парирует рассогласование u зк , аналогично парированию
рассогласования кс от внешнего возмущения.
Управление курсом от рукоятки осуществляется «по положению».
Заданный курс пилот отслеживает по прибору .
5
6.
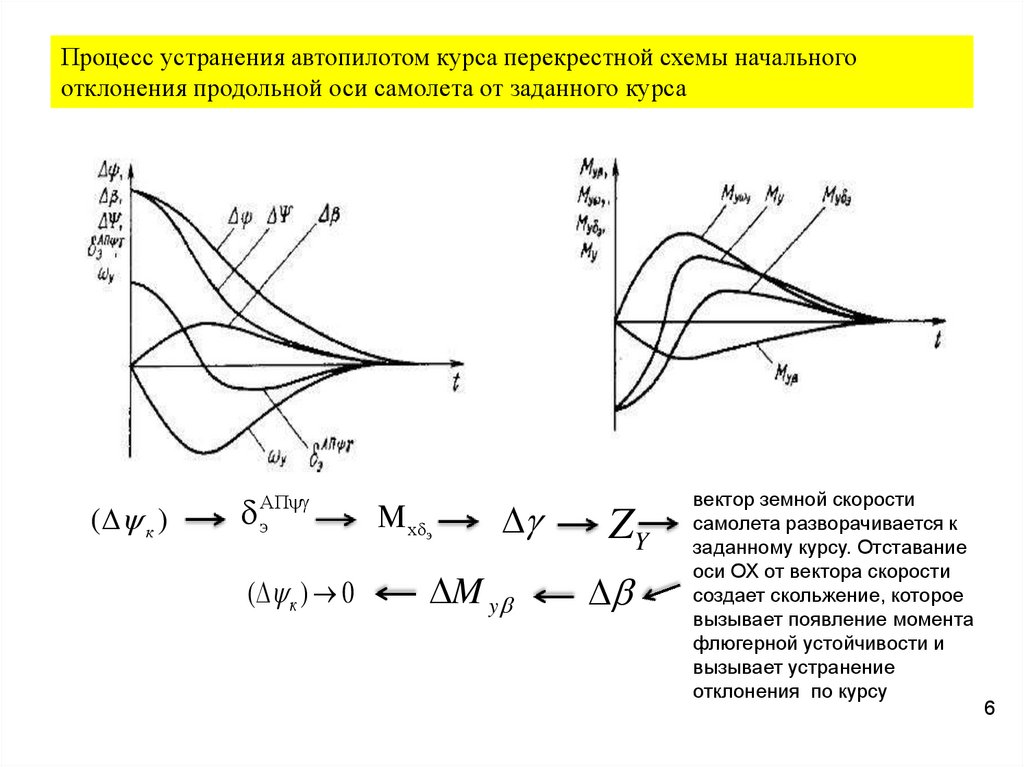
Процесс устранения автопилотом курса перекрестной схемы начальногоотклонения продольной оси самолета от заданного курса
( к )
АП
э
( к ) 0
М x э
M y
ZY
вектор земной скорости
самолета разворачивается к
заданному курсу. Отставание
оси ОХ от вектора скорости
создает скольжение, которое
вызывает появление момента
флюгерной устойчивости и
вызывает устранение
отклонения по курсу
6
7.
Парируя отклонение самолета по курсу, автопилот отклоняет элероны и вводитсамолет в крен, который создает боковую силу. В результате вектор земной
скорости самолета разворачивается к заданному курсу. Вследствие отставания
продольной оси самолета от вектора скорости создается приращение угла
скольжения. Момент статической путевой устойчивости М y разворачивает
продольную ось самолета вслед за вектором скорости к заданному курсу.
Для уменьшения скольжения канал руля направления может работать как
автомат боковой устойчивости.
7
8.
Автопилот курса перекрестной схемы с жесткой обратной связью в сервоприводеявляется статическим по отношению к постоянно действующему внешнему
моменту М (так же как для автопилота курса прямой схемы)
yв
Статическая ошибка определяется из равенства управляющего момента руля
направления и возмущающего момента
M yв
2
( к ) уст э
.
2
my Sl V k k
Ступенчатый боковой ветер автопилотами курса как прямой, так и перекрестной
схем парируется без статических ошибок по курсу. Однако при этом угол пути
изменяется на величину приведенного к ветру угла скольжения
w
и самолет изменяет направление полета.
8
9.
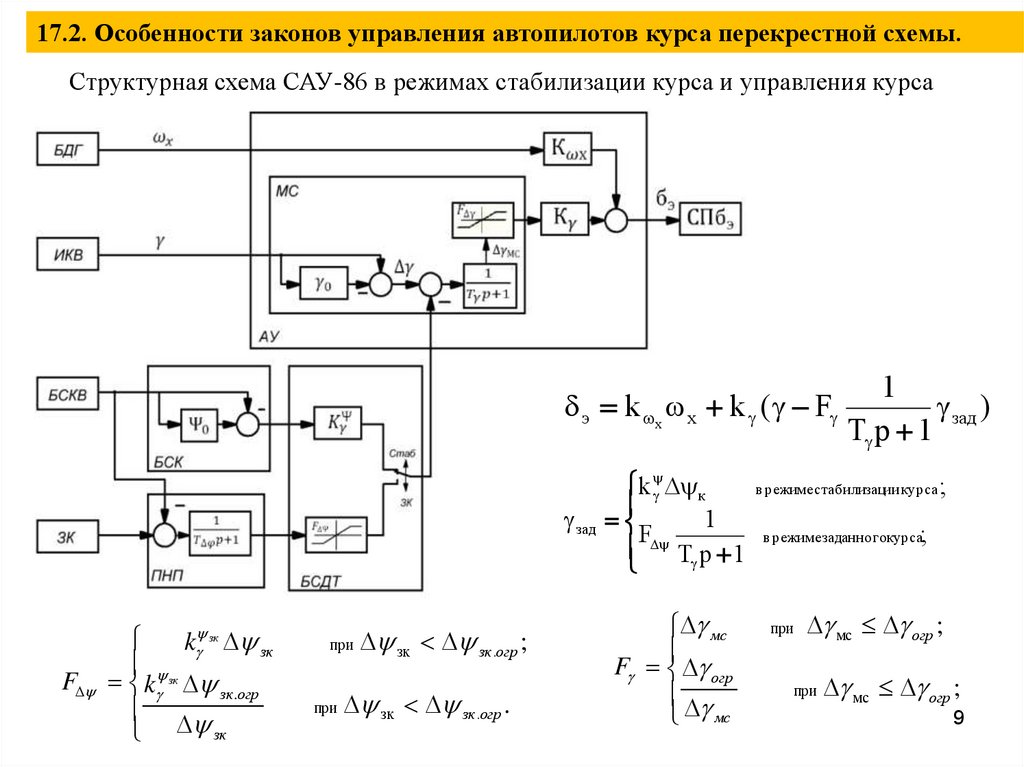
17.2. Особенности законов управления автопилотов курса перекрестной схемы.Структурная схема САУ-86 в режимах стабилизации курса и управления курса
1
э k x x k ( F
зад )
T p 1
k к
в режиме стабилизации курса ;
1
зад
F
в режиме заданногокурса;
T
p
1
k зк зк
F k зк зк .огр
зк
при
при
зк зк .огр ;
зк зк .огр .
мс
F огр
мс
при
мс огр ;
при
мс огр ;
9
10.
На схеме: БДГ- блок демпфирующих гироскопов, ИКВ инерциальная курсовертикаль, БСКВ - базовая система курса ивертикали. ПУ -пульт управления, ПНП - пилотажно-навигационный
прибор, БСДТ - блок связи с датчиками траектории.
10