

 industry
industrySimilar presentations:










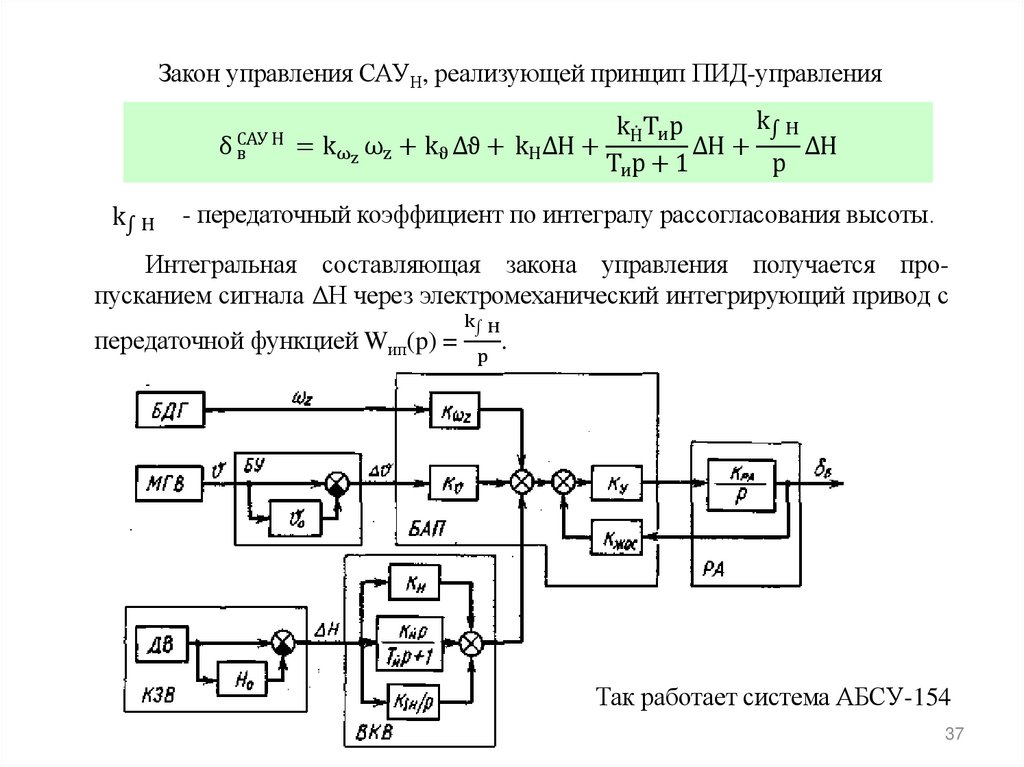
Автоматическая стабилизация и управление продольным траекторным движением. Лекция 4
1.
ТЕМА № 2.1 УПРАВЛЕНИЕ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ НА МАРШРУТЕЛекция 4. АВТОМАТИЧЕСКАЯ СТАБИЛИЗАЦИЯ И УПРАВЛЕНИЕ
ПРОДОЛЬНЫМ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ
2.1. Общее понятие о ПНК.
2.2. Навигационная задача. Понятия RNAV, VNAV, LNAV.
2.3. Система автоматического управления высотой
и система
автоматического управления вертикальной скорости.
2.4. Управление продольным движением с помощью САУН.
2.5. Особенности законов управления САУ высотой. Эксплуатационные
особенности.
ЛИТЕРАТУРА 1.__[1]__стр._320-325_
1
2.
2.1. Общее понятие о ПНК.Современным отечественным аналоговым автоматизированным бортовым
системам управления полетом более 70 лет. Их появление обычно связывают
с созданием бортовой системы управления заходом на посадку БСУ-ЗП,
которая устанавливалась на самолетах Ил-18, Ту-124, Ту-134
Все системы, входящие в состав БСУ-ЗП, разделяются на три группы:
автопилот обеспечивает стабилизацию трех угловых координат относительно
центра масс и стабилизацию барометрической высоты, выполнение
координированных разворотов, набора высоты или снижения;
система «Путь-4МПА» осуществляет автоматическое и директорное
управление самолетом в режимах захода на посадку при помощи РТС СП-50 М,
начиная с четвертого разворота до высоты 60 м, и стабилизацию траекторного
движения задаваемых РТС. Система дает совмещенную индикацию основных
параметров положения самолета в пространстве и команд на управление
самолетом, а также выдает информацию о неисправности системы «Путь4МПА», РТС навигации и посадки;
автомат триммирования служит для автоматического триммирования руля
высоты при включенном продольном канале автопилота и индикации усилий в
тягах управления рулем высоты. БСУ-ЗП обеспечивает заход на посадку 2по 1
категории ИКАО.
3.
Более совершенные системы: АБСУ-154 (самолет Ту-154), САУ-1Т(самолет Ил-62), АБСУ-134 (самолет Ту-134), САУ-42 (самолет Як42), САУ-1Т-2-86 (самолет Ил-86), САУ-28 (самолет Ан-28) и др.
Все эти системы имеют много общего. Компоновка их в виде
отдельных функциональных подсистем (модулей) позволяет
постоянно их совершенствовать.
Так, к настоящему времени
перечисленные бортовые системы, имеющие в своем составе
устройства (подсистемы)
автоматизации ухода на второй круг,
дают возможность эксплуатировать воздушные суда по II и III категориям ИКАО.
Все эти системы имеют высокую надежность, сохраняя
работоспособность при отказе и возможность безопасного
завершения полета при втором одноименном отказе.
3
4.
ПНК представляет собой совокупность устройств сбора иобработки информации, а также устройств формирования и
исполнения команд управления полетом самолета.
Деление ПНК на навигационную и пилотажную части является
условным
Навигационный комплекс, или точнее автоматизированный навигационный комплекс, представляет совокупность специализированного вычислителя, датчиков и систем отображения навигационной информации для автоматизированного решения основной навигационной задачи при полете по маршруту, а
именно, вывода самолета в заданную точку по желаемой
пространственно-временной траектории.
Так, Навигационный комплекс самолета Ту-154М обеспечивает
автоматизированное самолетовождение по участкам маршрута при
ручном программировании каждого последующего участка
4
5.
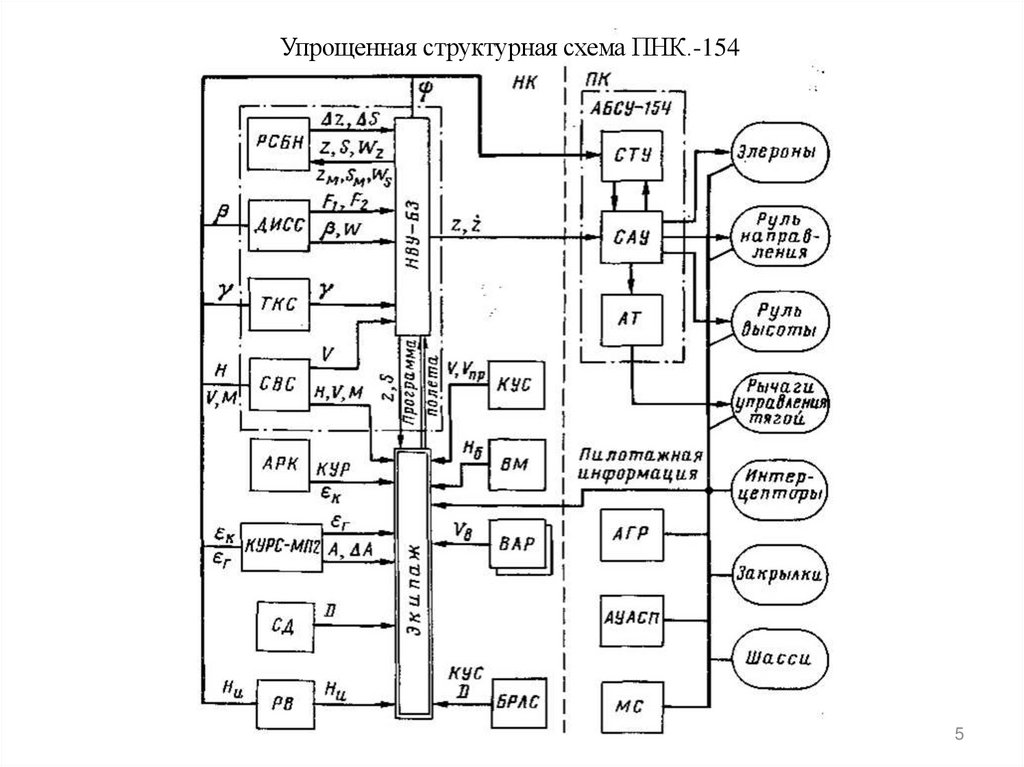
Упрощенная структурная схема ПНК.-1545
6.
Пилотажный комплекс или автоматизированный пилотажныйкомплекс
—
это
совокупность
специализированного
вычислителя, датчиков и систем отображения информации,
предназначенная для формирования и исполнения команд
управления самолетом на маршруте по данным НК и
автономно при полете вблизи земли (взлет, посадка, уход на
второй крут и т. д.).
Пилотажный комплекс самолета Ту-154 обеспечивает автоматическое и
полуавтоматическое (директорное) управление самолетом при следовании по участкам маршрута по сигналам НК и при заходе на посадку
по сигналам навигационно-посадочной системы КУРС-МП-2. Кроме
того, ПК включает в себя системы устойчивости и управляемости
самолета и систему автоматического управления тягой двигателей
6
7.
Системы ТКС, ДИСС, СВС являются основными датчикаминавигационной информации и совместно с системой РСБН и
навигационным вычислителем НВУ-БЗ обеспечивают
автоматическое
счисление
места
самолета
в
частноортодромической системе координат и его коррекцию
относительно наземных радиомаяков РСБН.
Остальные системы и приборы навигационной части ПНК
служат для определения и представления различных
навигационных параметров экипажу самолета и выдачи их в
пилотажный
комплекс
для
формирования
команд
управления самолетом.
7
8.
2.2. Навигационная задача. Понятия RNAV, VNAV, LNAV.Навигация — процесс управления некоторым объектом (имеющим
собственные методы передвижения) в определённом пространстве передвижения.
Состоит из двух основных частей:
1.
2.
Теоретическое обоснование и практическое применение методов управления
объектом;
Маршрутизация, выбор оптимального пути следования объекта в пространстве.
Навигация воздушная (аэронавигация), - наука о методах и средствах
вождения летательных аппаратов (ЛА) — самолётов, вертолётов, ракет и др.;
т.е. совокупность операций по определению навигационных элементов или
наземными пунктами управления полётами или на борту ЛА и
использованию их для вождения ЛА.
При рассмотрении алгоритмов управления ЛА на маршруте их можно
разделить на управление боковым и продольным движением. Алгоритмы
управления продольным движением можно разбить, в свою очередь, на
управление скоростью и высотой полета.
8
9.
ВОЗДУШНАЯ НАВИГАЦИЯ обеспечивает решение:– основной навигационной задачи - вождение ЛА по траектории,
определяемой маршрутом (трассой) и профилем полёта, с заданной
программой, регламентирующей режим полёта ЛА от его взлёта с начального
пункта маршрута (НПМ) и до посадки в конечном пункте маршрута (КПМ) в
заданное время.
– и частных навигационных задач :
• выдерживание заданных дистанций и интервалов времени между ЛА на
трассах с интенсивным воздушным движением или при выходе с трассы к
аэродрому посадки,
• предупреждение столкновения ЛА в полёте с наземными препятствиями
(горой и др.),
• сближение двух ЛА в полёте (встреча с самолётом-танкером для дозаправки
горючим и др.) и т.д.
9
10.
При выполнении полёта по заданным траектории (или маршруту) и программезадача воздушной навигации сводится к получению непрерывной или периодической
информации о текущих навигационных элементах поступательного движения центра
масс ЛА относительно системы координат, привязанной к земной поверхности.
Для определения навигационных элементов (Курса , угла сноса, путевого угла,
воздушной и путевой скоростей, высоты, координат местонахождения ЛА и др.)
применяются различные технические средства, которые в зависимости от первичного
источника навигационной информации подразделяются на 4 основные группы:
10
11.
1.2.
3.
4.
Геотехнические, позволяющие определять относительную высоту полёта,
магнитный курс, местонахождение ЛА измерением различных параметров
геофизических полей Земли - (магнитного, гравитационного и др.); к ним относятся
Высотомеры, измерители воздушной и путевой скоростей, магнитные Компасы, и
гиромагнитные компасы, гирополукомпасы, оптические визиры, инерциальные
навигационные системы и т.д..
Радиотехнические, позволяющие определять истинную высоту, путевую скорость,
местонахождение ЛА измерением различных параметров электромагнитного поля
по радиосигналам, излучаемым специальными передающими устройствами; к ним
относятся Радиовысотомеры, Радиомаяки, Радиокомпасы, радионавигационные
системы и т.д..
Астрономические, позволяющие определять курс и местонахождение ЛА по
параметрам светил; к ним относятся астрономические компасы, Секстанты,
астроориентаторы и т.д..
Светотехнические, предназначенные для обеспечения посадки ЛА в сложных
метеорологических условиях и ночью, а также для облегчения ориентировки
(светомаяки).
11
12.
Т. к. каждой группе технических средств навигации свойственнысвои преимущества и недостатки, то для обеспечения точного полёта ЛА
по заданному маршруту в любых условиях погоды навигационные
средства, работающие на различных принципах, объединяются как
датчики в единые комплексные системы.
В
таких
системах
с
помощью
аналоговых
или
цифровых
вычислительных машин решаются основные навигационные задачи и
записывается программа предстоящего полёта (координаты пунктов
заданного маршрута, высоты и скорости пролёта над пунктами,
координаты
радионавигационных
систем
и
др.).
Комплексные
навигационные системы, связанные с автопилотом, могут обеспечить
автоматический полёт по всему маршруту и заход на посадку при
отсутствии видимости земной поверхности.
12
13.
В общем случае применяемая комплексная навигационнаясистема определяет местоположение ЛА по трём координатам: 2
координаты — проекции его центра масс на горизонтальную
плоскость (долгота и широта), и одна — высота.
Для ориентировки ЛА достаточно знать 2 координаты в
горизонтальной плоскости. Маршрут полёта контролируется по
линии пути, определяемой проекцией вектора путевой скорости.
Последний находится как результат сложения измеряемых векторов
воздушной скорости (скорости ЛА по отношению к воздуху) и
скорости воздушного течения по отношению к земной поверхности.
Высота полёта измеряется высотомером.
13
14.
Для определения текущих координат местоположения ЛА в полётеиспользуются разные методы, сводящиеся к трём основным:
1) счисления пути, основанный на получении линий (поверхностей)
положения ЛА дискретным или непрерывным суммированием во времени его
измеряемой скорости или ускорения;
2) позиционный (линий положения, или позиционных линий), которым
непосредственно определяют линии (поверхности) положения ЛА без учёта
пройденного им расстояния путём нахождения координат местоположения ЛА
относительно известных наземных ориентиров или небесных светил;
3)
обзорно-сравнительный
(ориентировка),
которым
определяют
местоположение ЛА либо путём сличения фактически наблюдаемой картины
местности
по
опознанным
наземным
ориентирам
(зрительным,
радиолокационным, магнитным и др.) с географической картой или условной
моделью местности, либо путём сличения участка небесного свода со звёздной
картой.
14
15.
В зависимости от специфики вождения различных видов ЛА, их класса иназначения, районов их применения и характера маршрута комплексные системы Н.
в. отличаются друг от друга по составу.
Выбор технических средств Н. в. и её методов производится в соответствии с
заранее разработанным штурманским планом.
Штурманским планом полета называется заранее продуманный порядок работы экипажа в воздухе по
самолетовождению. В зависимости от сложности полета и времени на подготовку этот порядок может быть
выучен на память, записан в порядке последовательности действий экипажа или составлен в виде схемы с
пояснениями.
Тщательно продуманный план полета обеспечивает успешное и безопасное выполнение полета,
предотвращает принятие необдуманных решений и обеспечивает согласованность действий членов экипажа в
воздухе.
Разработка плана полета состоит в выборе наиболее надежных способов самолетовождения по участкам
трассы с учетом навигационной обстановки полета. В плане полета указываются:
1) способы выхода на ИПМ;
2) способы выхода на ЛЗП по участкам маршрута;
3) способы контроля и исправления пути по участкам маршрута;
4) порядок работы на контрольном этапе;
5) способы выхода на ППМ, КПМ и аэродром посадки;
6) порядок и способы использования радиотехнических средств самолетовождения;
7) действия экипажа на случай потери ориентировки;
8) действия на случай резкого ухудшения метеорологических условий.
Штурманский план полета составляется в виде схемы с пояснениями.
15
16.
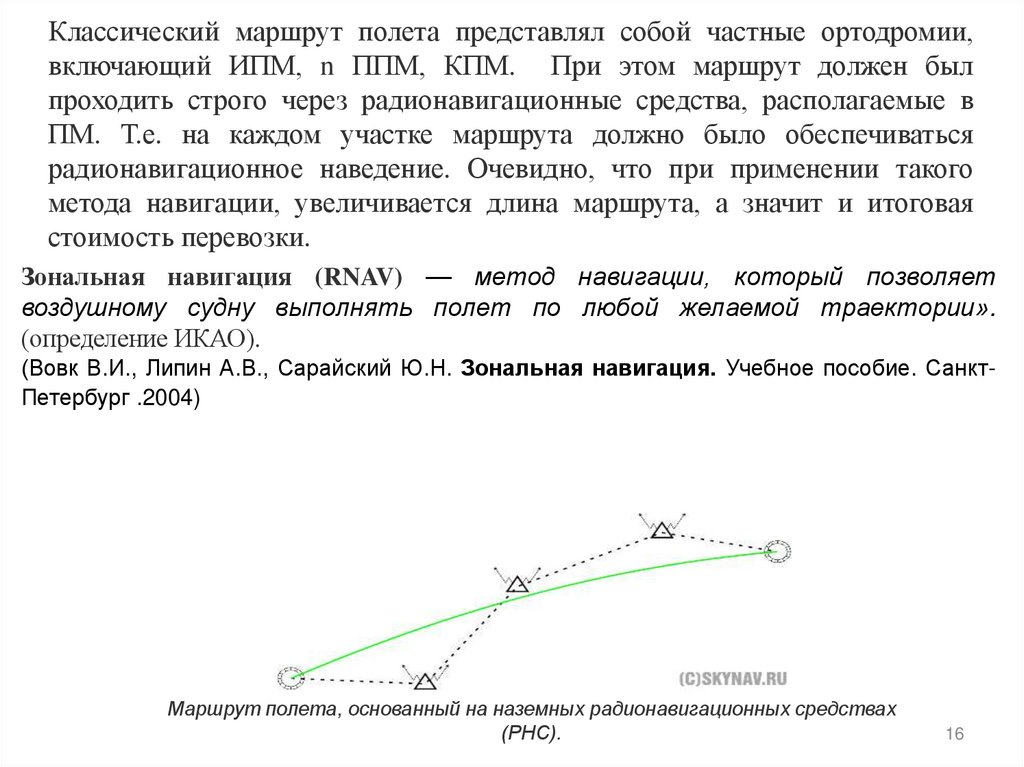
Классический маршрут полета представлял собой частные ортодромии,включающий ИПМ, n ППМ, КПМ. При этом маршрут должен был
проходить строго через радионавигационные средства, располагаемые в
ПМ. Т.е. на каждом участке маршрута должно было обеспечиваться
радионавигационное наведение. Очевидно, что при применении такого
метода навигации, увеличивается длина маршрута, а значит и итоговая
стоимость перевозки.
Зональная навигация (RNAV) — метод навигации, который позволяет
воздушному судну выполнять полет по любой желаемой траектории».
(определение ИКАО).
(Вовк В.И., Липин А.В., Сарайский Ю.Н. Зональная навигация. Учебное пособие. СанктПетербург .2004)
Маршрут полета, основанный на наземных радионавигационных средствах
(РНС).
16
17.
Оборудование, обеспечивающее возможность такой навигации, стали называть«оборудованием зональной навигации» или «оборудованием RNAV». Оно
должно автоматически определять местоположение ВС по одному или
нескольким навигационным датчикам и вычислять расстояние вдоль линии
пути, боковое отклонение, время полета до выбранного пункта, а также
обеспечить непрерывную индикацию отклонения на приборе типа ПНП или
КПП, то есть обеспечить собственно наведение. Сама же траектория задается,
как правило, геодезическими координатами (широтой и долготой) нескольких ее
точек, называемых точками пути.
Точность навигации определяется используемыми методами расчета
траектории и составом оборудования на борту ВС. Условно пространственное
управление ВС (RNAV ) разделяется на горизонтальное (LNAV) и вертикальное
(VNAV)
Итак, RNAV - это метод навигации, а LNAV / VNAV - подсистемы
автофокусировки.
LNAV – траектория по горизонтали, это курс (в двух измерениях по земле), а
VNAV - траектория полета по вертикали (вверх и вниз).
17
18.
RNAV рассматривается ИКАО как основной вид навигации будущего, поскольку онаобладает целым рядом неоспоримых преимуществ перед навигацией обычной,
традиционной:
1. Полеты становятся более безопасными за счет повышения точности навигации. Это
связано с тем, что при введении RNAV в каком-либо регионе одновременно вводятся и
требования к точности (в виде RNP).
2. Увеличивается пропускная способность и эффективность использования воздушного
пространства как на маршрутах, так и в районах аэродромов. Это происходит с одной
стороны за счет увеличения количества маршрутов в данном объеме воздушного
пространства (теперь они не обязательно должны проходить через радиомаяки), а с другой за счет уменьшения интервалов бокового эшелонирования, которое оказывается теперь
возможным, поскольку точность навигации стала выше.
3. Появляется возможность сделать структуру маршрутов динамичной, легко меняющейся в
зависимости от обстановки. При этом могут быть учтены интересы как гражданской, так и
государственной авиации. Гибкость RNAV позволяет избежать скопления ВС в
определенных участках воздушного пространства, серьезных уплотнений маршрутов и
появления «воздушных пробок».
4. Маршруты можно устанавливать более короткими, что приводит к экономии авиатоплива
и уменьшению летного времени.
5. При наличии наведения летный экипаж более наглядно представляет себе
навигационную ситуацию, что позволяет избежать неправильных решений и ошибок.
6. Уменьшается нагрузка как пилота, так и диспетчера за счет возможности отказаться от
радиолокационного наведения, осуществляемого диспетчером в районе аэродрома.
7. Оказывается возможным сократить количество наземных навигационных средств.
18
19.
2.3. Система автоматического управления высотойавтоматического управления вертикальной скорости.
и
система
Управление ВС в вертикальной плоскости одна из главных задач навигации,
реализуемая в автоматическом режиме системой автоматического
управления высотой.
Система автоматического управления высотой (САУН) автоматическое
устройство, обеспечивающее стабилизацию и управление продольным траекторным
движением самолета в крейсерском полете по маршруту и во время предпосадочного
маневра путем отклонения руля высоты при возникновении рассогласования между
значениями текущей и заданной барометрической высотой. ЗУ системы имеет вид:
δСАУН
= kωz ωz + kϑ ∆ϑ + kН Н − Н0
в
(2.1)
δСАУН
- автоматическое отклонение руля высоты от балансировочного положения;
в
∆ϑ-приращение опорного (т.е. имевшего место в момент включения режима) угла
тангажа ϑ0.
kН -передаточный коэффициент по барометрической высоте, определяющий угол
отклонения руля высоты при возникновении рассогласования между значениями
текущей и опорной барометрической высоты в 1 м.;
Н,Н0 - соответственно текущее и опорное (в момент включения режима) значения
барометрической высоты;
20.
Закон управления (2.1) можно также представить как закон управленияавтопилота угла тангажа, обеспечивающий формирование заданного угла
тангажа пропорционально приращению барометрической высоты:
δСАУН
= kωz ωz + kϑ ∆ϑ − ∆ϑзад
в
∆ϑ = ϑ − ϑ0 ;
(2.2)
∆ϑзад= kН
ϑ Н − Н0
где ∆ϑ, ∆ϑзад- соответственно приращения текущего и заданного значений угла
тангажа;
kН
ϑ - Передаточный коэффициент по углу тангажа, определяющий, на сколько
градусов должен измениться угол тангажа при возникновении
рассогласования между значениями текущей и опорной барометрической
высоты в 1 м.
Сервоприводы систем автоматического управления включаются по
параллельной схеме в прямые обратимые системы управления, либо по
последовательной схеме в бустерные или электродистанционные системы
управления. Совместное управление рулем высоты со стороны пилота и САУН
исключается. При воздействии пилота на колонку штурвала САУН выключается и
освобождает механическую проводку управления рулем высоты.
Сервоприводы бывают как электромеханического, так и электрогидравлического
принципа действия.
20
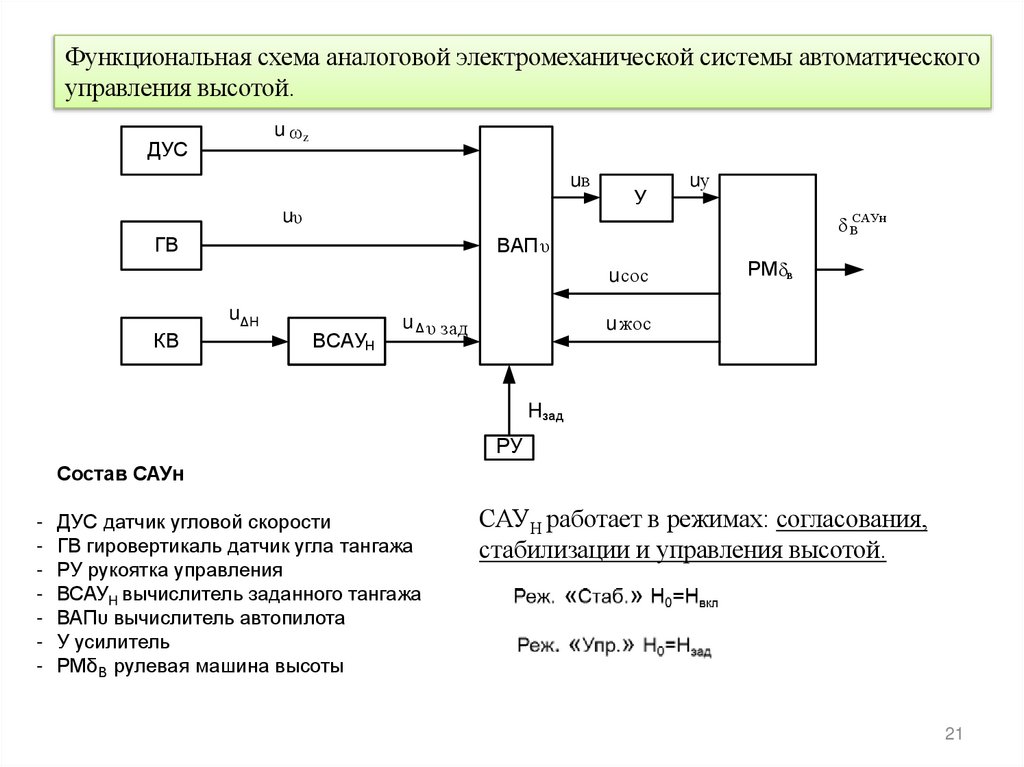
21.
Функциональная схема аналоговой электромеханической системы автоматическогоуправления высотой.
u ωz
ДУС
uв
uυ
ГВ
У
δ ВСАУн
ВАПυ
uсос
uΔH
КВ
uу
ВСАУН
u Δ υ зад
РМδв
uжос
Hзад
РУ
Состав САУн
- ДУС датчик угловой скорости
- ГВ гировертикаль датчик угла тангажа
- РУ рукоятка управления
- ВСАУH вычислитель заданного тангажа
- ВАПυ вычислитель автопилота
- У усилитель
- РМδВ рулевая машина высоты
САУН работает в режимах: согласования,
стабилизации и управления высотой.
21
22.
В режиме согласования в корректоре высоты КВ происходит непрерывноеобнуление сигнала текущей высоты с помощью электромеханической следящей
системы. Система может работать при этом в автопилотном режиме
стабилизации угла тангажа. Т.о. происходит запоминание текущей высоты и
обеспечивается подготовка САУН к безударному включению для стабилизации
высоты.
При включении режима стабилизации высоты следящая система корректора
высоты размыкается и начинается формирование сигнала разности uΔн между
опорным значением высоты, которую имел самолет в момент включения режима
стабилизации Н0=Нвкл, и значением текущей высоты Н.
Любое отклонение самолета под действием внешних возмущений от опорной
высоты воспринимается САУН как рассогласование, которое необходимо
парировать. Сигнал uΔн поступает на вход вычислителя, где формируется сигнал,
пропорциональный приращению значения заданного угла тангажа uΔυзад.
Сервопривод преобразует этот сигнал в перемещение вала рулевой машины
высоты.
Как только сигнал обратной связи uжос уравновесит сигнал с корректора высоты
uΔн и пропорциональный ему сигнал заданного тангажа uΔυзад, отработка руля
высоты рулевой машиной прекратится и руль остановится в некотором
положении, пропорциональном возникшему рассогласованию (Н0-Н).
22
23.
Отклонение руля высоты вызывает управляющий аэродинамический моменттангажа Mzδв , противоположный по знаку возмущению, вызвавшему
рассогласование (Н0-Н). Самолет начнет изменять угол тангажа и с гировертикали
появится сигнал текущего тангажа uυ, который преобразуется в механизме
согласования вычислителя ВАПυ в сигнал uΔυ(uв). Под действием этого сигнала
сервопривод начнет отрабатывать руль высоты в обратную сторону. Когда сигнал
приращения текущего угла тангажа uΔυ сравняется с сигналом приращения
заданного угла тангажа uΔυзад., руль высоты вернется в исходное балансировочное
положение.
Самолет с новым углом тангажа начнет приближаться к опорному значению
высоты. Тогда равновесие сигналов uΔυ и uΔυзад. вновь нарушится и их разность
поменяет знак. Сервопривод начнет отрабатывать руль высоты в противоположную
от балансировочного положения сторону. Когда сигнал обратной связи uжос
сравняется с сигналом разности (uΔυ-uΔυзад.), руль высоты остановится. Самолет
начнет уменьшать приращение угла тангажа и по мере выхода на опорную высоту
сигналы uΔυ, uΔυзад.и uΔн станут равными нулю. Тогда под действием сигнала
обратной связи uжос руль высоты возвратится в исходное балансировочное положение.
Действия сигналов uωz с датчика угловой скорости и uсос с тахогенератора
аналогичны их действию в демпфере и автопилоте угла тангажа, т.е. они
обеспечивают качество переходного процесса по тангажу и высоте.
23
24.
Режим управления высотой от задатчика высоты реализуется согласнозакона управления 2.2. При этом заданный угол тангажа определяется
следующим образом:
∆ϑзад= kН
ϑ Нзад − Н0 ,
(2.3)
где Нзад заданное значение барометрической высоты (например, высоты
эшелона).
Для формирования Нзад используется специальный задатчик на пульте
управления. Формирование разности (Нзад-Н) происходит в вычислителе
системы воздушных сигналов. Работа САУН в этом режиме аналогична ее
работе в режиме стабилизации, так как она воспринимает управляющее
воздействие ΔН = (Нзад-Н) как внешнее возмущение.
24
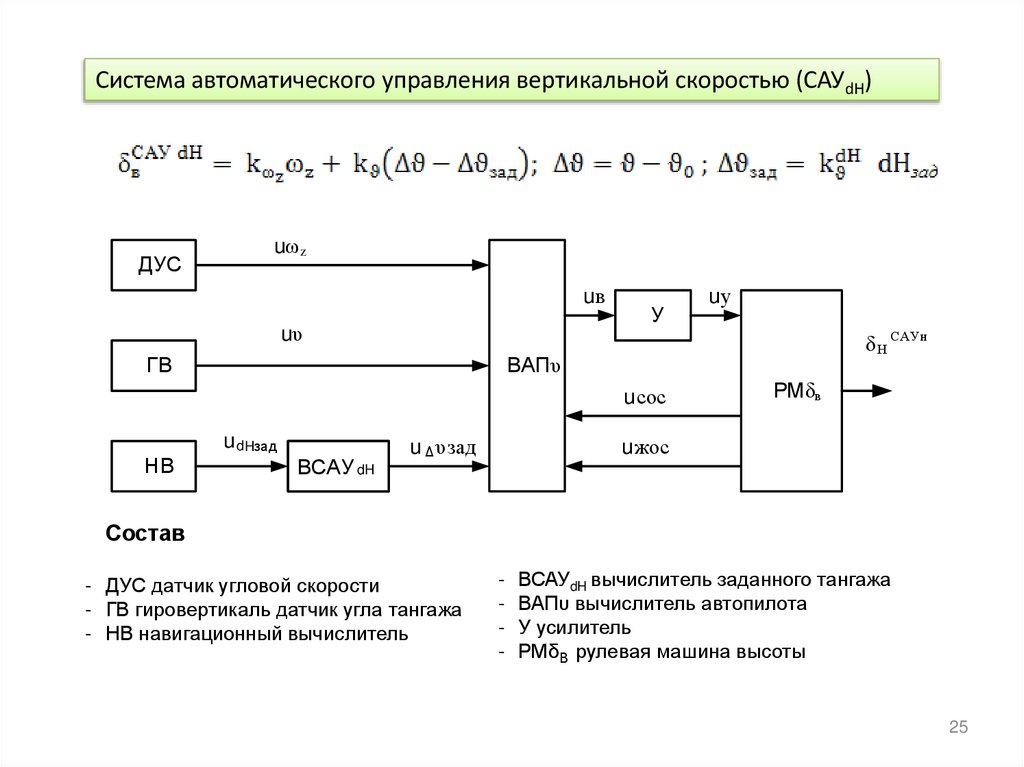
25.
Система автоматического управления вертикальной скоростью (САУdН)ДУС
uω z
uв
uυ
ГВ
У
δ Н САУн
ВАПυ
uсос
u dHзад
НВ
uу
ВСАУ dH
u Δ υзад
РМδв
uжос
Состав
- ДУС датчик угловой скорости
- ГВ гировертикаль датчик угла тангажа
- НВ навигационный вычислитель
- ВСАУdH вычислитель заданного тангажа
- ВАПυ вычислитель автопилота
- У усилитель
- РМδВ рулевая машина высоты
25
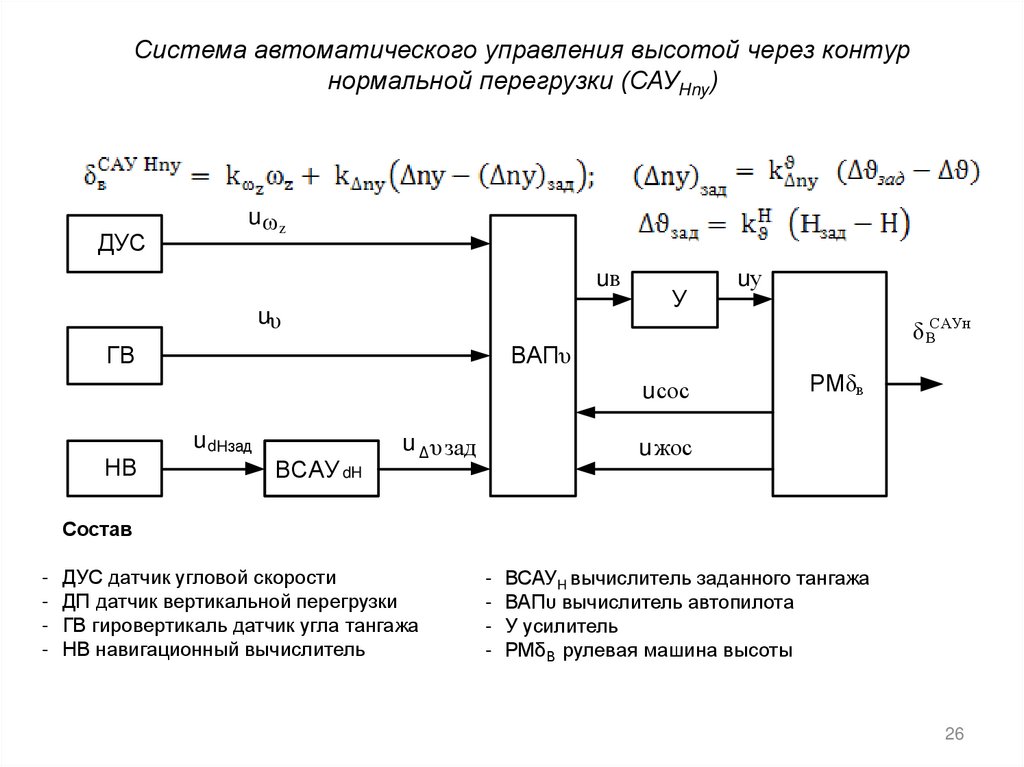
26.
Система автоматического управления высотой через контурнормальной перегрузки (САУHny)
ДУС
uωz
uв
uυ
ГВ
У
δ ВСАУн
ВАПυ
uсос
НВ
uу
u dHзад
ВСАУ dH
u Δ υзад
РМδв
uжос
Состав
- ДУС датчик угловой скорости
- ДП датчик вертикальной перегрузки
- ГВ гировертикаль датчик угла тангажа
- НВ навигационный вычислитель
- ВСАУH вычислитель заданного тангажа
- ВАПυ вычислитель автопилота
- У усилитель
- РМδВ рулевая машина высоты
26
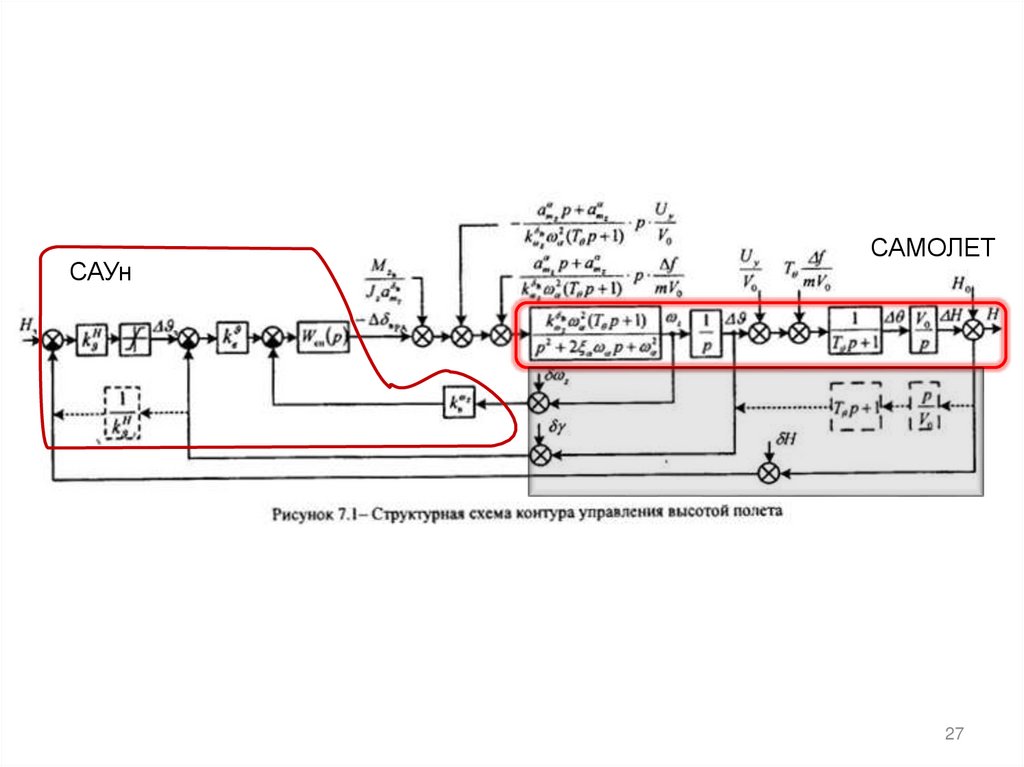
27.
САУнСАМОЛЕТ
27
28.
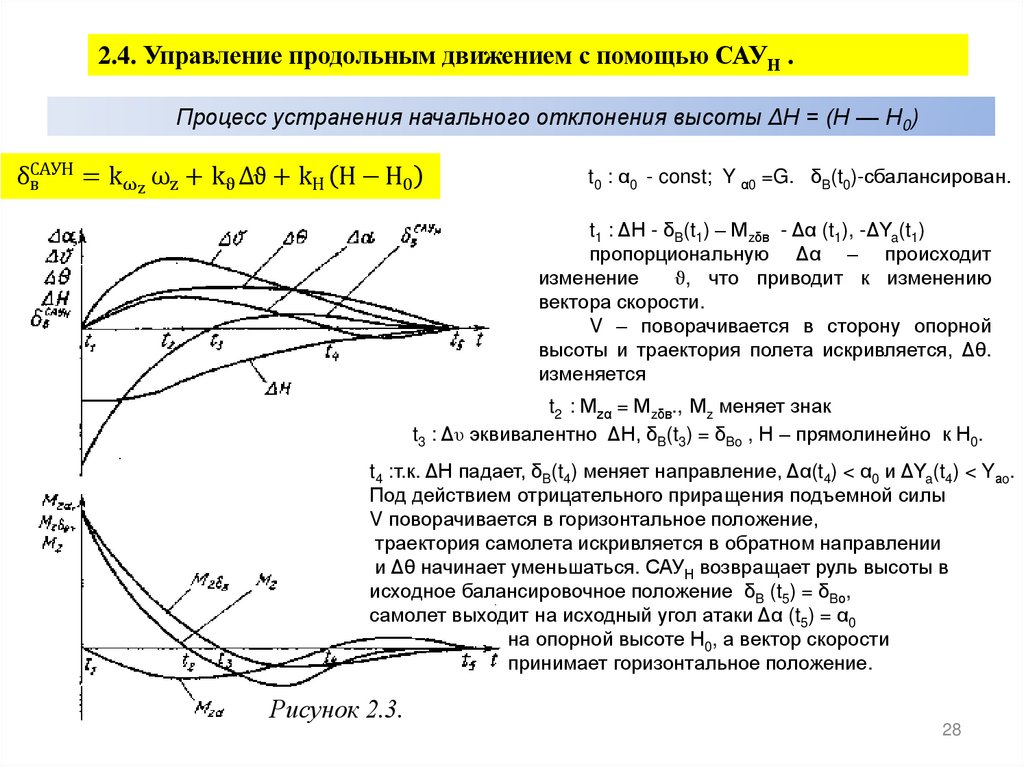
2.4. Управление продольным движением с помощью САУН .Процесс устранения начального отклонения высоты ΔН = (Н — Н0)
δСАУН
= kωz ωz + kϑ ∆ϑ + kН Н − Н0
в
t0 : α0 - const; Y α0 =G. δB(t0)-сбалансирован.
t1 : ΔН - δB(t1) – Мzδв - Δα (t1), -ΔYa(t1)
пропорциональную Δα – происходит
изменение
ϑ, что приводит к изменению
вектора скорости.
V – поворачивается в сторону опорной
высоты и траектория полета искривляется, Δθ.
изменяется
t2 : Мzα = Мzδв., Мz меняет знак
t3 : Δυ эквивалентно ΔН, δB(t3) = δBo , Н – прямолинейно к Н0.
t4 :т.к. ΔН падает, δB(t4) меняет направление, Δα(t4) < α0 и ΔYa(t4) < Yаo.
Под действием отрицательного приращения подъемной силы
V поворачивается в горизонтальное положение,
траектория самолета искривляется в обратном направлении
и Δθ начинает уменьшаться. САУН возвращает руль высоты в
исходное балансировочное положение δB (t5) = δBо,
самолет выходит на исходный угол атаки Δα (t5) = α0
на опорной высоте Н0, а вектор скорости
принимает горизонтальное положение.
Рисунок 2.3.
28
29.
2.5.1. Рассмотрим процесс устранения отрицательногоотклонения высоты ΔН = (Н — Н0) с помощью САУН (рис. 2.3).
начального
1.В начальный момент времени t0 самолет летит с постоянным углом атаки α0.
Подъемная сила Yα0 уравновешивает силу тяжести самолета G. Руль высоты
находится в балансировочном положении δB(t0).
2.Появление рассогласования по высоте ΔН в момент времени t1,: начинает
парироваться САУН отклонением руля высоты на отрицательный угол δB(t1).
Управляющий момент тангажа Мzδв вызывает увеличение угла атаки на величину
Δα(t1), пропорциональную δB(t1). В результате подъемная сила увеличивается на
величину ΔYa(t1), пропорциональную Δα. Это сопровождается изменением угла
тангажа . Под действием приращения подъемной силы вектор скорости
поворачивается в сторону опорной высоты и траектория полета самолета
искривляется, что выражается в изменении угла наклона траектории Δθ.
Изменение угла атаки вызывает появление статического момента Мzα, который в
момент времени t2 уравновешивает управляющий момент Мzδв. В результате
суммарный момент тангажа Mz сначала обнуляется , а затем меняет знак и
приращение угла тангажа уменьшается, САУН постепенно возвращает руль
высоты к исходному положению.
29
30.
3. В момент t3, когда приращение угла тангажа Δυ станет эквивалентно отклонениюΔН, руль высоты вернется в балансировочное положение δB(t3) = δBo и самолет будет
прямолинейно приближаться к опорной высоте Н0.
4. Вследствие уменьшения рассогласования ΔН САУН к моменту времени t4
отклоняет руль высоты в противоположную сторону на положительный угол δB(t4).
В результате значения угла атаки и подъемной силы становятся меньше
первоначальных значений Δα(t4)<α0и ΔYa(t4)<Yаo. Под действием отрицательного
приращения подъемной силы вектор скорости поворачивается в горизонтальное
положение, траектория самолета искривляется в обратном направлении и
приращение угла наклона траектории Δθ начинает уменьшаться. САУН возвращает
руль высоты в исходное балансировочное положение δB(t5) = δBо, самолет выходит
на исходный угол атаки Δα(t5) =α0 на опорной высоте Н0, а вектор скорости
принимает горизонтальное положение.
30
31.
Как видно из графиков, процесс устранения начального отклонения Н0 имеетплавный апериодический характер.
Качество работы САУН оценивается по времени окончания переходного
процесса, полному отсутствию или малой величине перерегулирования по высоте.
Как следует из вышеизложенного для плавного выхода самолета на заданную
высоту принципиально необходимо присутствие в законе управления САУН
сигнала, пропорционального углу тангажа.
Отсутствие сигнала по углу тангажа привело бы к тому, что в течение всего
времени устранения отклонения от заданной высоты САУН удерживала бы руль
высоты в отклоненном в одну сторону положении. Тогда имело бы место
постепенное приращение подъемной силы и траектория искривлялась все время в
одну сторону. При подходе к заданной высоте вектор скорости был бы не в
горизонтальном положении. Самолет проскочил бы заданную высоту и процесс
стабилизации высоты стал бы колебательным и, может быть, неустойчивым.
Таким образом, сигнал угла тангажа в законе управления САУН служит для
демпфирования траекторных колебаний самолета по высоте.
31
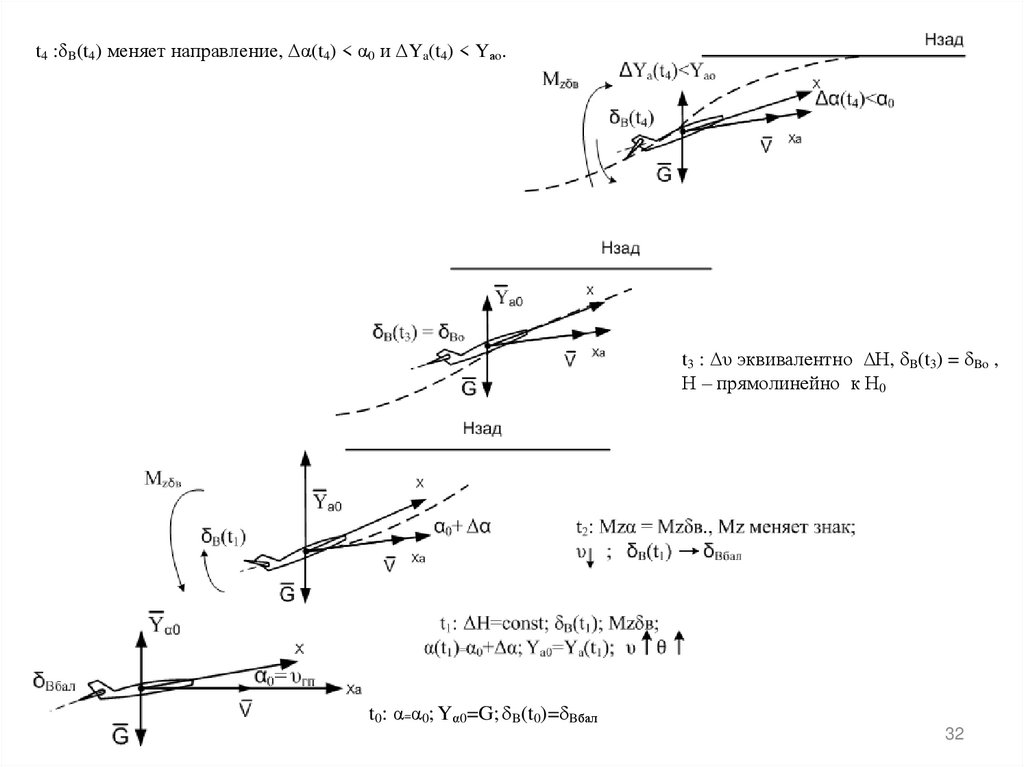
32.
t4 :δB(t4) меняет направление, Δα(t4) < α0 и ΔYa(t4) < Yаo.t3 : Δυ эквивалентно ΔН, δB(t3) = δBo ,
Н – прямолинейно к Н0
t0: α=α0; Yα0=G; δB(t0)=δBбал
32
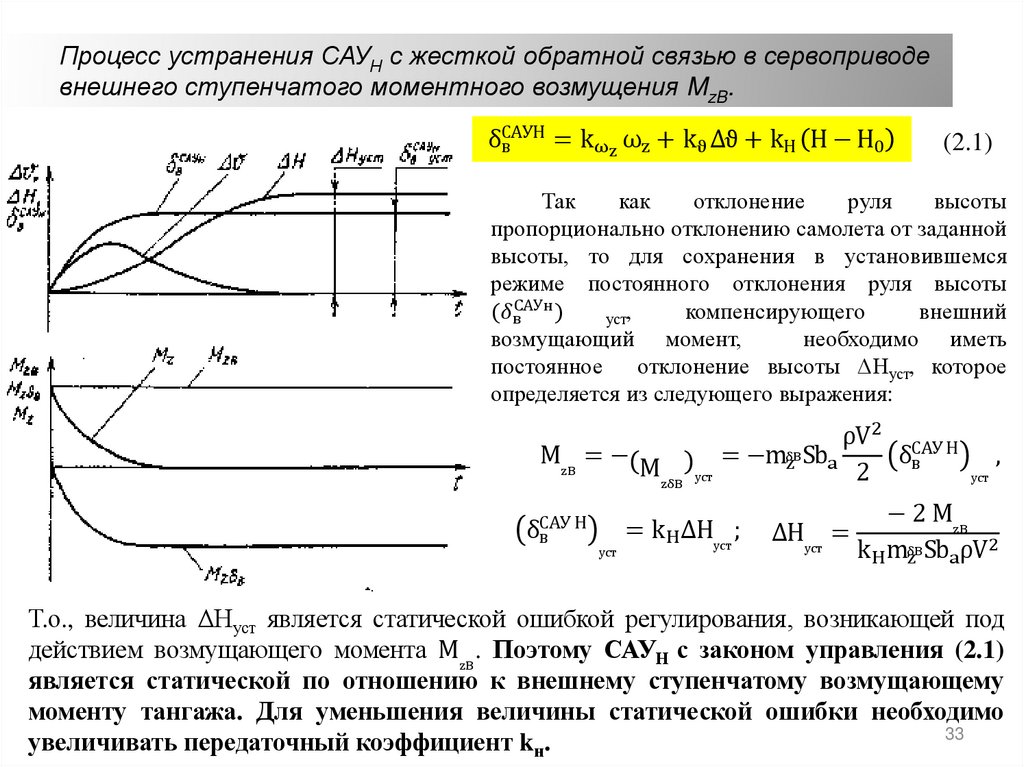
33.
Процесс устранения САУН с жесткой обратной связью в сервоприводевнешнего ступенчатого моментного возмущения MzB.
δСАУН
= kωz ωz + kϑ ∆ϑ + kН Н − Н0
в
(2.1)
Так
как
отклонение
руля
высоты
пропорционально отклонению самолета от заданной
высоты, то для сохранения в установившемся
режиме постоянного отклонения руля высоты
(