


 warfare
warfareSimilar presentations:







 – эффективное средство вооружѐнной борьбы. (основы технической подготовки и связи).10 кл")


Разработка программы управления БПЛА
1.
Разработкапрограммы управления
БПЛА
2.
Лев ПарасоцкийСпециалист по matlab
Илья Лобастов
Документация
Михаил Лыгин
Капитан
Екатерина Приходько
Презентация, документация
Ярослав Мялицын
Аналитик ИБ
Александр Рафшнайдер
Программист
Почти придумали
Команда
Азат Широв
Аналитик ИБ
3.
ПроблемаРазвитие беспилотных систем сопровождается развитием технологий управления
такими системами. Развитие технологий влечет формирование новых методов
взаимодействия с беспилотными летательными системами.
В свою очередь это влечет уязвимые места беспилотника.
Наша задача не только написать алгоритмы управления, но и решить вопрос его
безопасности.
4.
Задачи−
разработка алгоритмов планирования движения
−
разработка ПИД-регулятора/закона управления,
−
разработка алгоритмов стабилизации полета,
−
реализация возможности подключения компонентов к
полетному контроллеру,
−
разработка модуля полета по глобальной навигационной системы.
5.
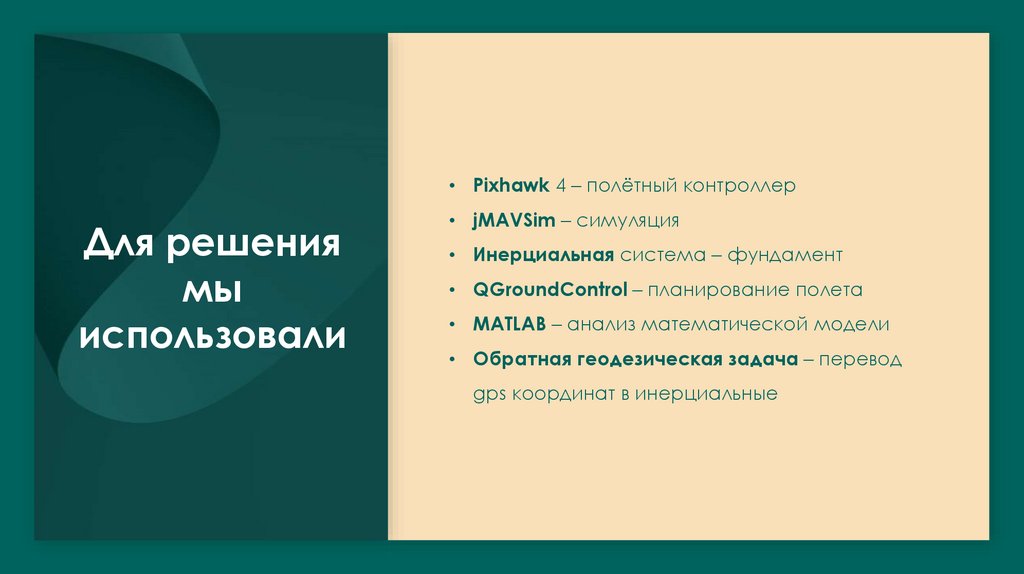
• Pixhawk 4 – полётный контроллерДля решения
мы
использовали
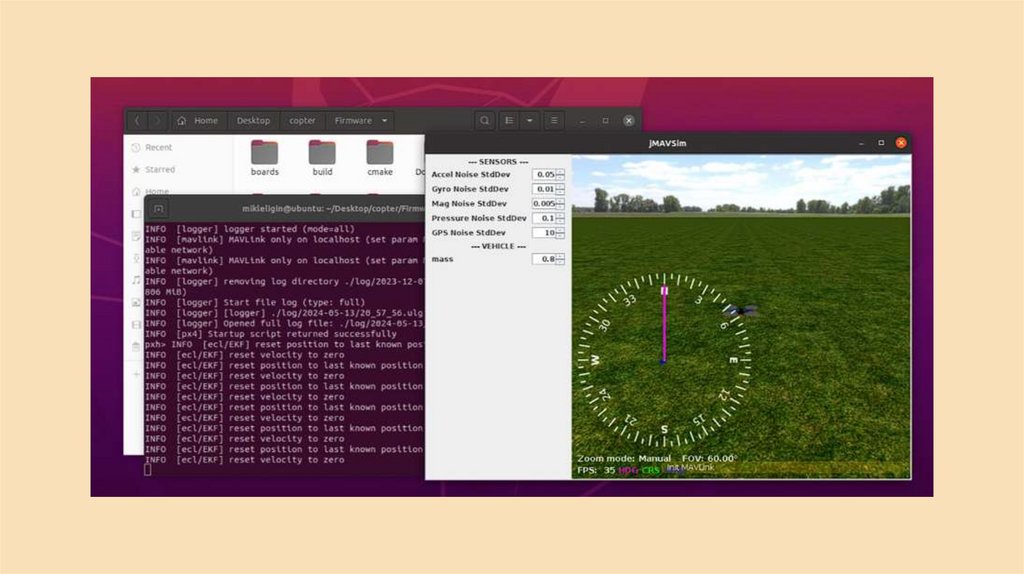
• jMAVSim – симуляция
• Инерциальная система – фундамент
• QGroundControl – планирование полета
• MATLAB – анализ математической модели
• Обратная геодезическая задача – перевод
gps координат в инерциальные
6.
Основные угрозыбезопасности БПЛА
jamming
spoofing
7.
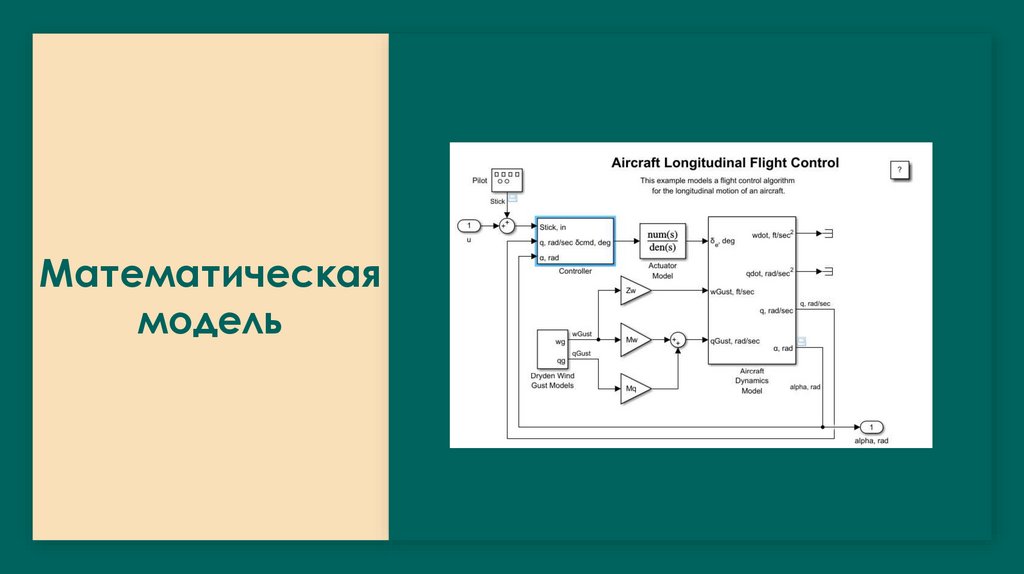
Математическаямодель
8.
Marketing strategiesImplement personalized engagement
c
strategies
Tailor campaigns to resonate with specific
demographics, fostering a sense of
relevance and connection
Collaborate with influencers and thought
leaders to amplify our brand message
9.
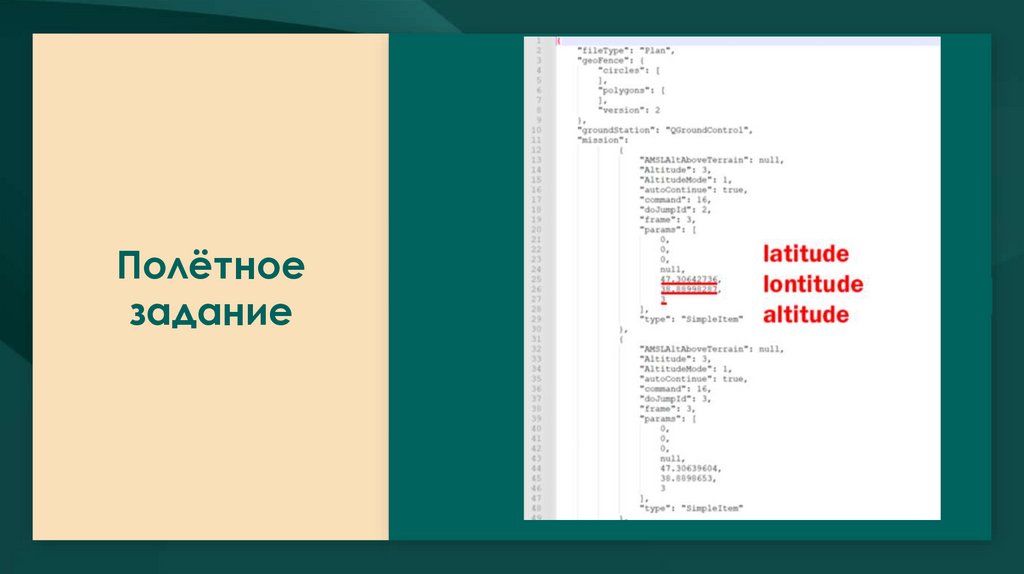
QGroundControl10.
Полётноезадание
11.
Режимы работы контроллераOffboard
Управление
производится с помощью
четырех координат
Altitude
Control
Полностью
контролируемая
логика поведения.
Автоматизирован только
механизм удержания высоты
12.
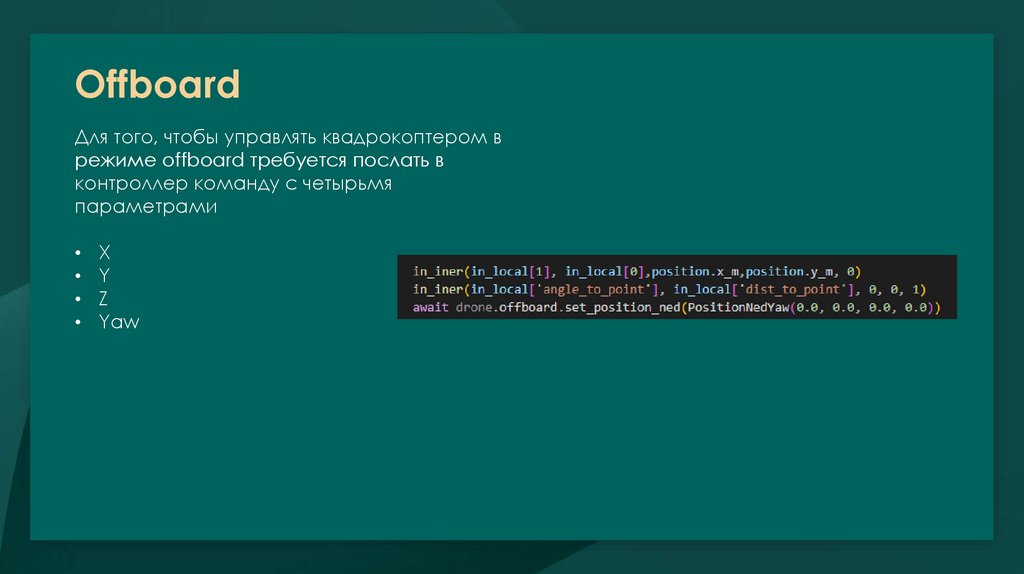
OffboardДля того, чтобы управлять квадрокоптером в
режиме offboard требуется послать в
контроллер команду с четырьмя
параметрами
X
Y
Z
Yaw
13.
Altitude ControlУправление в этом режиме предполагает
полный контроль над беспилотником.
Команда управления представляет собой
набор из четырех параметров. На этот раз
это крен, тангаж, высота и рыскание.
14.
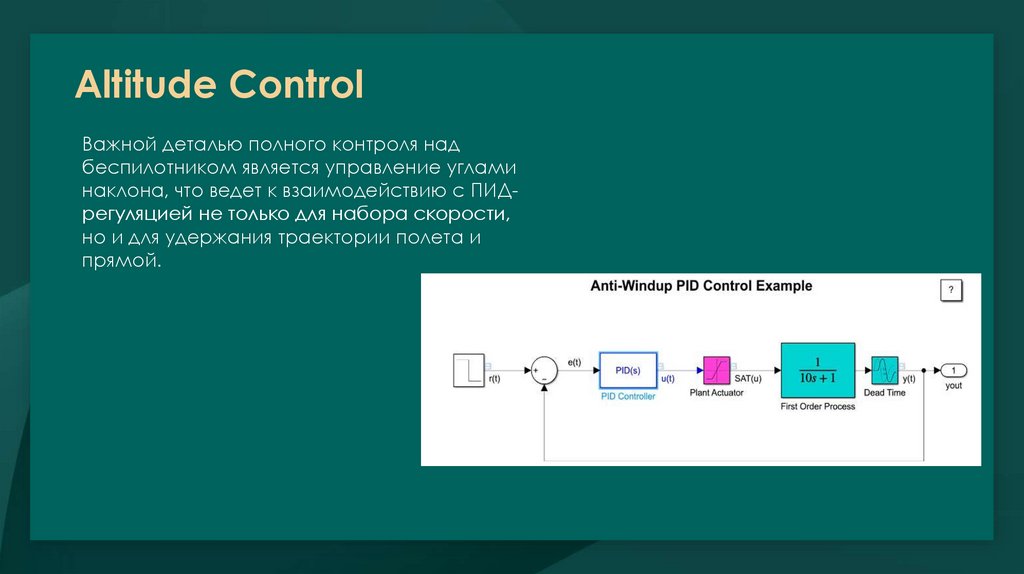
Altitude ControlВажной деталью полного контроля над
беспилотником является управление углами
наклона, что ведет к взаимодействию с ПИДрегуляцией не только для набора скорости,
но и для удержания траектории полета и
прямой.
15.
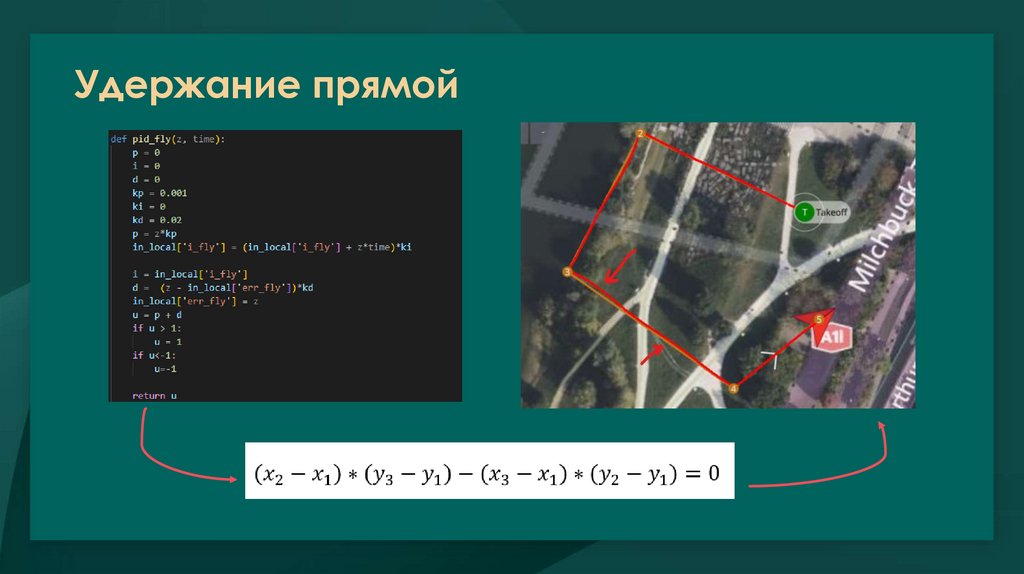
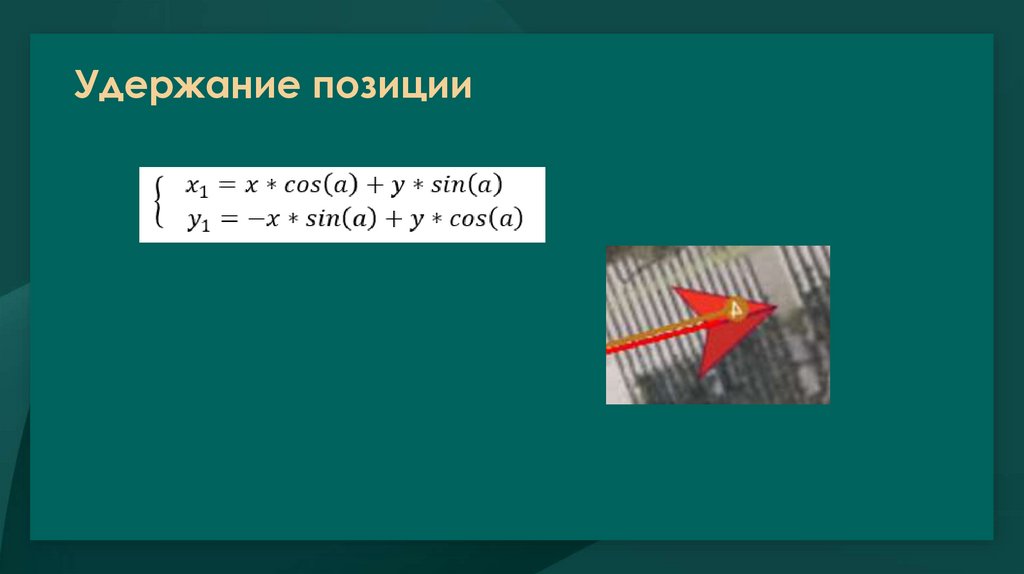
Удержание прямой16.
Удержание позиции17.
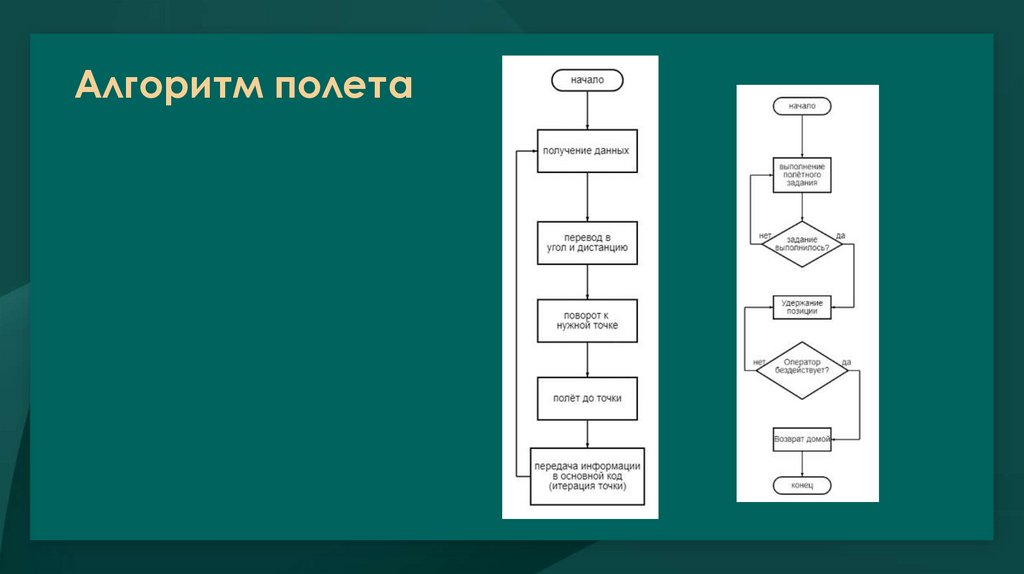
Алгоритм полета18.
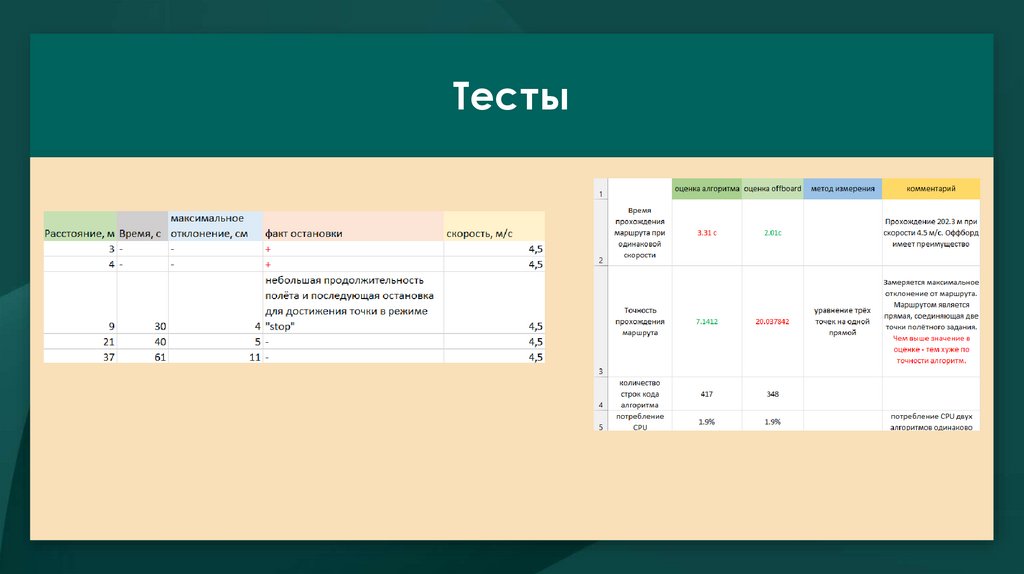
Тесты19.
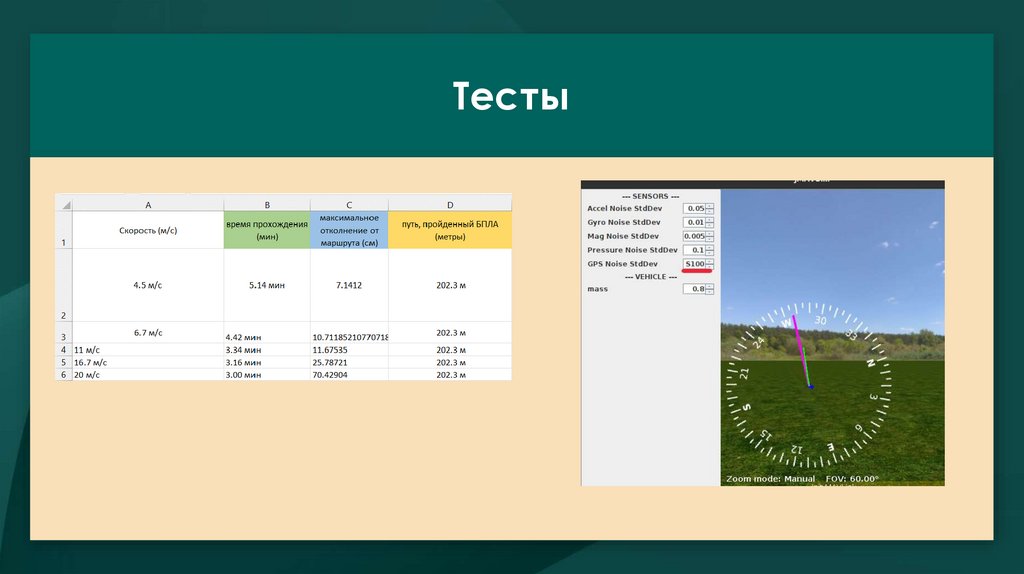
Тесты20.
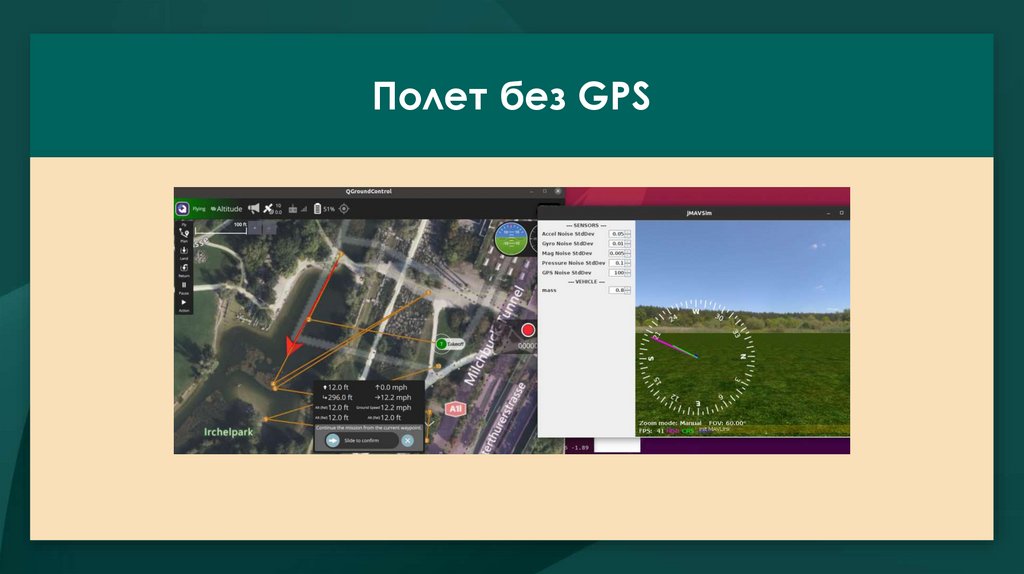
Полет без GPS21.
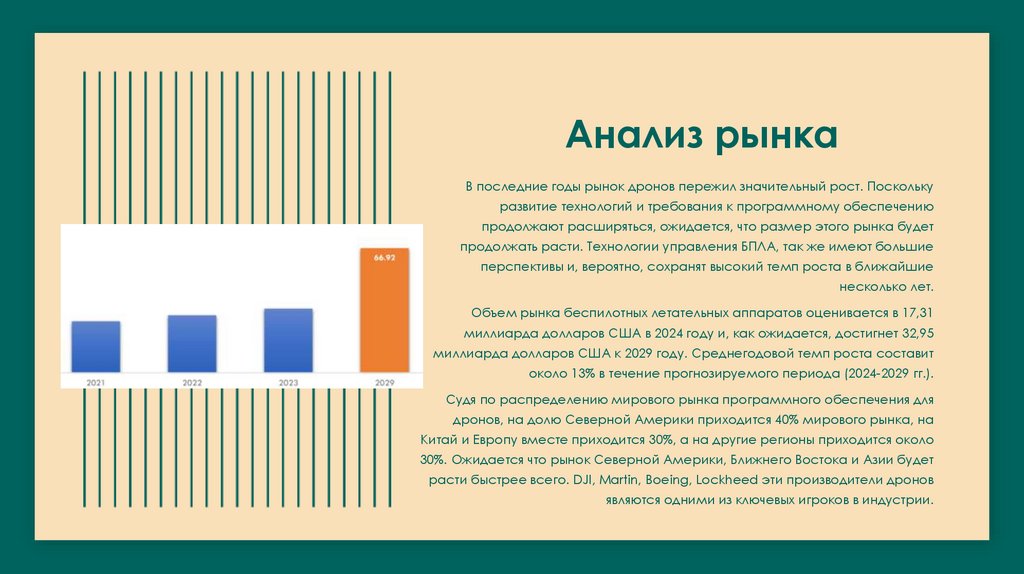
Анализ рынкаВ последние годы рынок дронов пережил значительный рост. Поскольку
развитие технологий и требования к программному обеспечению
продолжают расширяться, ожидается, что размер этого рынка будет
продолжать расти. Технологии управления БПЛА, так же имеют большие
перспективы и, вероятно, сохранят высокий темп роста в ближайшие
несколько лет.
Объем рынка беспилотных летательных аппаратов оценивается в 17,31
миллиарда долларов США в 2024 году и, как ожидается, достигнет 32,95
миллиарда долларов США к 2029 году. Среднегодовой темп роста составит
около 13% в течение прогнозируемого периода (2024-2029 гг.).
Судя по распределению мирового рынка программного обеспечения для
дронов, на долю Северной Америки приходится 40% мирового рынка, на
Китай и Европу вместе приходится 30%, а на другие регионы приходится около
30%. Ожидается что рынок Северной Америки, Ближнего Востока и Азии будет
расти быстрее всего. DJI, Martin, Boeing, Lockheed эти производители дронов
являются одними из ключевых игроков в индустрии.
22.
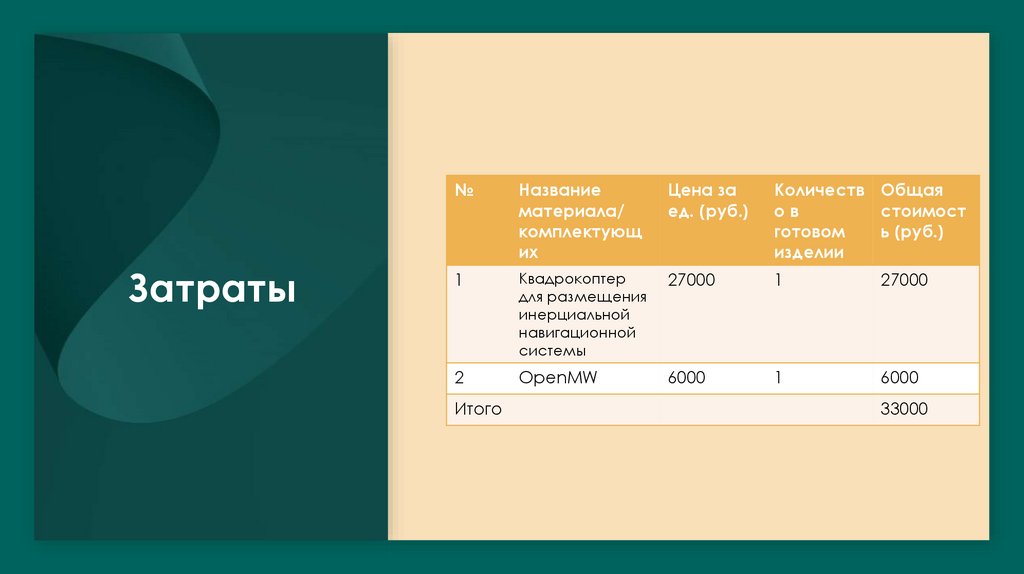
Затраты№
Название
материала/
комплектующ
их
Цена за
ед. (руб.)
Количеств Общая
ов
стоимост
готовом
ь (руб.)
изделии
1
Квадрокоптер
для размещения
инерциальной
навигационной
системы
27000
1
27000
2
OpenMW
6000
1
6000
Итого
33000
23.
Выполненные задачи−
были разработаны алгоритмы планирования движения
−
разработаны ПИД-регуляторы/законы управления,
−
разработаны алгоритмы стабилизации полета,
−
проработана возможность подключения компонентов к
полетному контроллеру,
−
разработан модуль полета по глобальной навигационной системы.
24.
Лев ПарасоцкийИлья Лобастов
Михаил Лыгин
Екатерина Приходько
Ярослав Мялицын
Александр Рафшнайдер
Спасибо за
внимание
Азат Широв