
 warfare
warfareSimilar presentations:










Разработка конструктора гоночного квадрокоптера
1.
ФГБОУ ВО Пензенский государственный университетПолитехническая школа ПГУ
РАЗРАБОТКА КОНСТРУКТОРА
ГОНОЧНОГО КВАДРОКОПТЕРА
ДЛЯ ИЗУЧЕНИЯ ОСНОВ
ЭКСПЛУАТАЦИИ БЕСПИЛОТНЫХ
МУЛЬТИРОТОРНЫХ СИСТЕМ
Разработали ученики Политехнической школы ПГУ
2.
ПРОБЛЕМЫНезнание и не понимание мира технических профессий;
Ориентация на тренды (цифровизация, IT и др.);
Слабая материально-техническая база в школах и Вузах;
Отсутствие интересных образовательных программ направленных на вовлечение
молодежи в научно-техническое творчество;
Отсутствие желания поступать на технические специальности.
3.
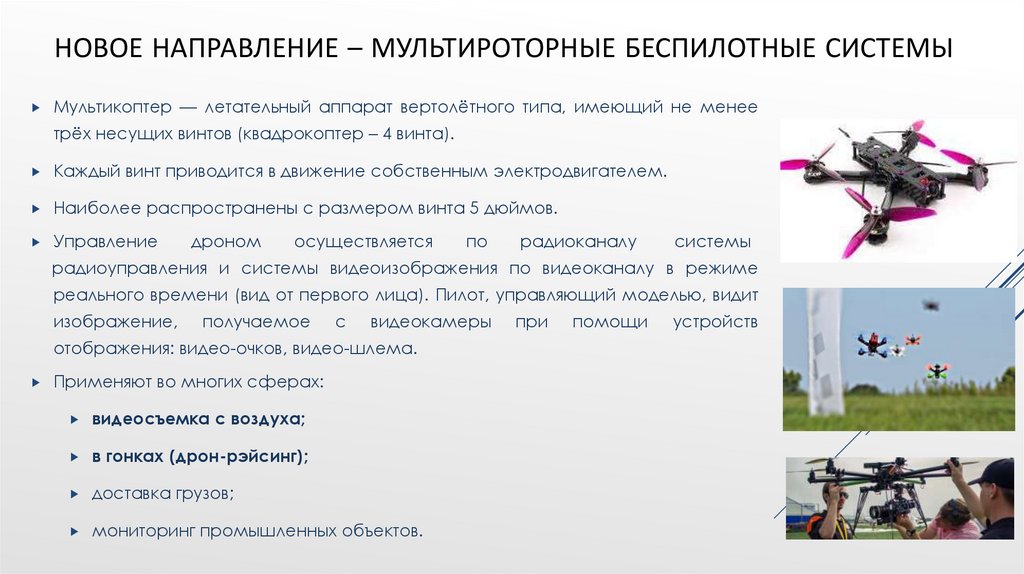
НОВОЕ НАПРАВЛЕНИЕ – МУЛЬТИРОТОРНЫЕ БЕСПИЛОТНЫЕ СИСТЕМЫМультикоптер — летательный аппарат вертолётного типа, имеющий не менее
трёх несущих винтов (квадрокоптер – 4 винта).
Каждый винт приводится в движение собственным электродвигателем.
Наиболее распространены с размером винта 5 дюймов.
Управление
дроном
осуществляется
по
радиоканалу
системы
радиоуправления и системы видеоизображения по видеоканалу в режиме
реального времени (вид от первого лица). Пилот, управляющий моделью, видит
изображение,
получаемое
с
видеокамеры
отображения: видео-очков, видео-шлема.
Применяют во многих сферах:
видеосъемка с воздуха;
в гонках (дрон-рэйсинг);
доставка грузов;
мониторинг промышленных объектов.
при
помощи
устройств
4.
ЦЕЛЬ ПРОЕКТАРазработка конструктора гоночного квадрокоптера для обучения учеников школ и
студентов Вузов города Пензы эксплуатации беспилотных мультироторных
систем.
Решаемые задачи:
Изучение
основных
видов
существующих квадрокоптеров;
и
конструкций
Разработка
документации
для
изготовления
конструктора гоночного квадрокоптера;
Изготовление прототипа конструктора;
Испытание прототипа;
Внедрение конструктора в школы и Вузы г. Пензы (в
планах на будущее).
5.
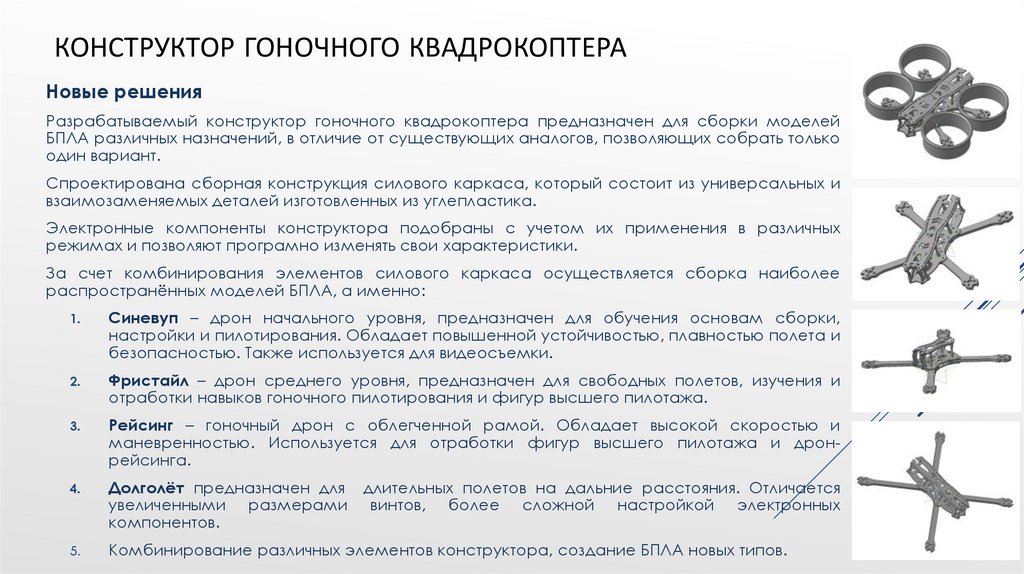
КОНСТРУКТОР ГОНОЧНОГО КВАДРОКОПТЕРАНовые решения
Разрабатываемый конструктор гоночного квадрокоптера предназначен для сборки моделей
БПЛА различных назначений, в отличие от существующих аналогов, позволяющих собрать только
один вариант.
Спроектирована сборная конструкция силового каркаса, который состоит из универсальных и
взаимозаменяемых деталей изготовленных из углепластика.
Электронные компоненты конструктора подобраны с учетом их применения в различных
режимах и позволяют програмно изменять свои характеристики.
За счет комбинирования элементов силового каркаса осуществляется сборка наиболее
распространённых моделей БПЛА, а именно:
1.
Синевуп – дрон начального уровня, предназначен для обучения основам сборки,
настройки и пилотирования. Обладает повышенной устойчивостью, плавностью полета и
безопасностью. Также используется для видеосъемки.
2.
Фристайл – дрон среднего уровня, предназначен для свободных полетов, изучения и
отработки навыков гоночного пилотирования и фигур высшего пилотажа.
3.
Рейсинг – гоночный дрон с облегченной рамой. Обладает высокой скоростью и
маневренностью. Используется для отработки фигур высшего пилотажа и дронрейсинга.
4.
Долголёт предназначен для длительных полетов на дальние расстояния. Отличается
увеличенными размерами винтов, более сложной настройкой электронных
компонентов.
5.
Комбинирование различных элементов конструктора, создание БПЛА новых типов.
6.
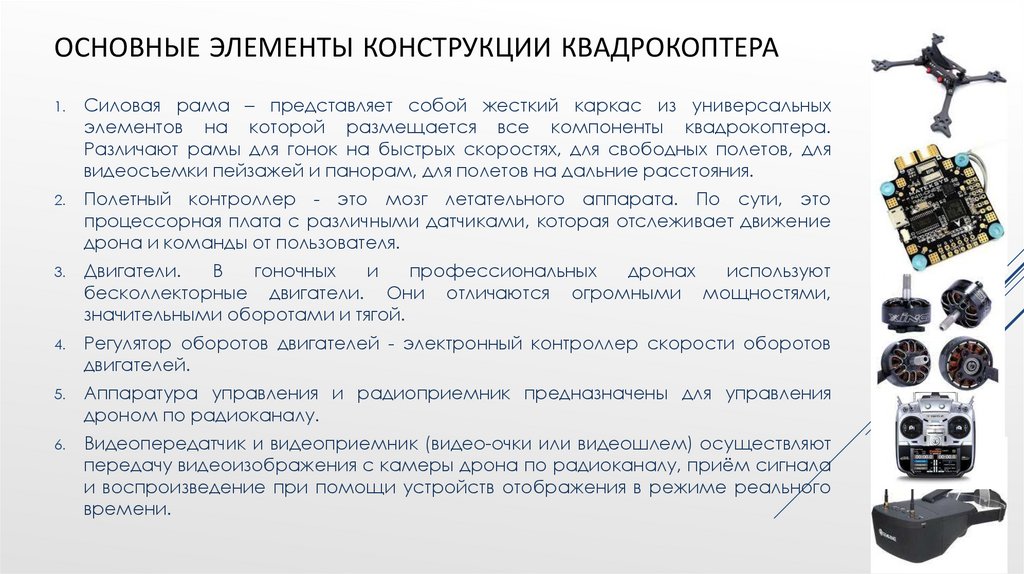
ОСНОВНЫЕ ЭЛЕМЕНТЫ КОНСТРУКЦИИ КВАДРОКОПТЕРА1.
Силовая рама – представляет собой жесткий каркас из универсальных
элементов на которой размещается все компоненты квадрокоптера.
Различают рамы для гонок на быстрых скоростях, для свободных полетов, для
видеосъемки пейзажей и панорам, для полетов на дальние расстояния.
2.
Полетный контроллер - это мозг летательного аппарата. По сути, это
процессорная плата с различными датчиками, которая отслеживает движение
дрона и команды от пользователя.
3.
Двигатели.
В
гоночных
и
профессиональных
дронах
используют
бесколлекторные двигатели. Они отличаются огромными мощностями,
значительными оборотами и тягой.
4.
Регулятор оборотов двигателей - электронный контроллер скорости оборотов
двигателей.
5.
Аппаратура управления и радиоприемник предназначены для управления
дроном по радиоканалу.
6.
Видеопередатчик и видеоприемник (видео-очки или видеошлем) осуществляют
передачу видеоизображения с камеры дрона по радиоканалу, приём сигнала
и воспроизведение при помощи устройств отображения в режиме реального
времени.
7.
РАСЧЕТ ХАРАКТЕРИСТИКРасчет характеристик разрабатываемого конструктора проводилась при помощи
калькулятора ECalc. Он позволяет не только рассчитать характеристики модели,
но и подобрать необходимые элементы.
8.
ПРОЕКТИРОВАНИЕ МОДЕЛЕЙ КОНСТРУКТОРАПроектирование элементов конструктора проводилось
в среде автоматического проектирования «Компас 3D».
Было спроектировано:
1.
Рама
квадрокоптера,
состоящая
взаимозаменяемых деталей различных типов.
2.
Защитные элементы фронтовых деталей рамы.
из
9.
ИЗГОТОВЛЕНИЕ РАМЫ ПУТЕМ ФРЕЗЕРОВАНИЯОперации фрезерования предназначены для обработки заготовок из
различных
материалов
при
помощи
фрез.
Фрезерование
подразумевает вращательное движения режущего инструмента,
которое является главным, и поступательное перемещение заготовки или
фрезерной головки, которое называется движением подачи.
Фрезерные операции применяются:
- обработка наружных
плоских поверхностей;
и
внутренних
- создание фасонных поверхностей;
- прорезание канавок, наружных
внутренних шлицев, пазов;
- и т. д.
и
10.
МАТЕРИАЛ РАМЫУглепластик – он же Карбон, это полимерный композитный материал. Он
достаточно легок и отличается повышенной прочностью. Композит
невосприимчив к воздействию влаги, не боится механических ударов, его не
разрушает коррозия.
В его основе углеродное полотно, а для связывания компонентов используется
эпоксидсодержащие
компоненты.
Композит
обладает
высокой анизотропностью – то есть внутри него волокна имеют строго
определенное направление. В отличие от металла, у которого однородная
структура, для из карбона можно корректировать торсионную жесткость. Это
позволяет делать детали на его основе жесткими, пластичными и податливыми
к продольным нагрузкам.
11.
ИЗГОТОВЛЕНИЕ РАМЫФрезеровка карбона – это обработка материала для придания ему нужной конфигурации,
размерных и функциональных характеристик.
Работа проводится помощью фрезеровочного станка, оснащенного механизмом ЧПУ.
Мастеру достаточно выбрать подходящий вид фрезы, ввести числовые значения проекта и
проконтролировать процесс.
После обработки на поверхности не остается острых заусенцев, а в дальнейшем возможно
отшлифовать изделие до блеска, придать ему фактурный вид, гравировать.
Для нашей конструкции рамы применялся концевой тип фрезерования.
углублений, канавок, изготовления объемных выступов.
Для нанесения
Обработка углеродного композита производилась алмазной фрезой, созданной с
напылением из натурального материала или же монокристалла. Также обращалось
внимание на скоростной режим – предпочтительно велась работа на невысоких оборотах,
чтобы избежать налипания на резчик и порчи материала.
Процесс был сопряжен с появлением угольных пылевых частиц (а они обладают высокой
электропроводностью), поэтому соблюдается максимальная осторожность и использовался
пылесос.
12.
ИЗГОТОВЛЕНИЕ ЗАЩИТНЫХ ЭЛЕМЕНТОВ ПУТЕМ 3D ПЕЧАТИДЛЯ ИЗГОТОВЛЕНИЯ ЗАЩИТНЫХ ЭЛЕМЕНТОВ РАМЫ
ПРИМЕНЯЛАСЬ ТЕХНОЛОГИЯ 3D ПЕЧАТИ
13.
ИЗГОТОВЛЕНИЕ РАМЫЧТО ТАКОЕ 3D
ПЕЧАТЬ?
14.
ИЗГОТОВЛЕНИЕ РАМЫПечать защитных элементов рамы проводилась в ЦМИТ «Прогресс». В
этом центре установлены современные 3D принтеры на которых и были
напечатаны наши детали.
15.
ПРОВЕДЕНИЕ ИСПЫТАНИЙ ПРОТОТИПА16.
ВЫВОДЫРазрабатываемый конструктор квадрокоптера позволит вовлечь в научноисследовательскую
и
творческую
деятельность
детей
и
молодёжь,
стимулировать их познавательные и профессиональные интересы, повысить
учебную мотивацию в области инженерных наук, популяризировать технические
направления обучения.