
 physics
physicsSimilar presentations:







")

")
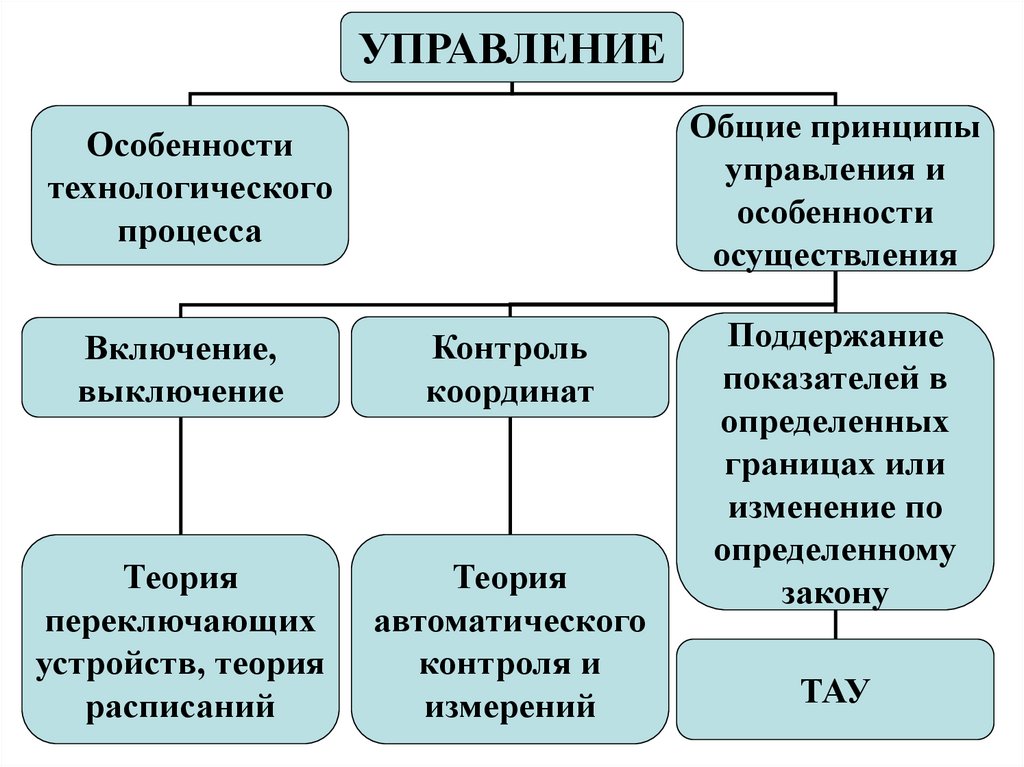
Общие принципы управления и особенности осуществления
1.
УПРАВЛЕНИЕОбщие принципы
управления и
особенности
осуществления
Особенности
технологического
процесса
Включение,
выключение
Контроль
координат
Теория
переключающих
устройств, теория
расписаний
Теория
автоматического
контроля и
измерений
Поддержание
показателей в
определенных
границах или
изменение по
определенному
закону
ТАУ
2.
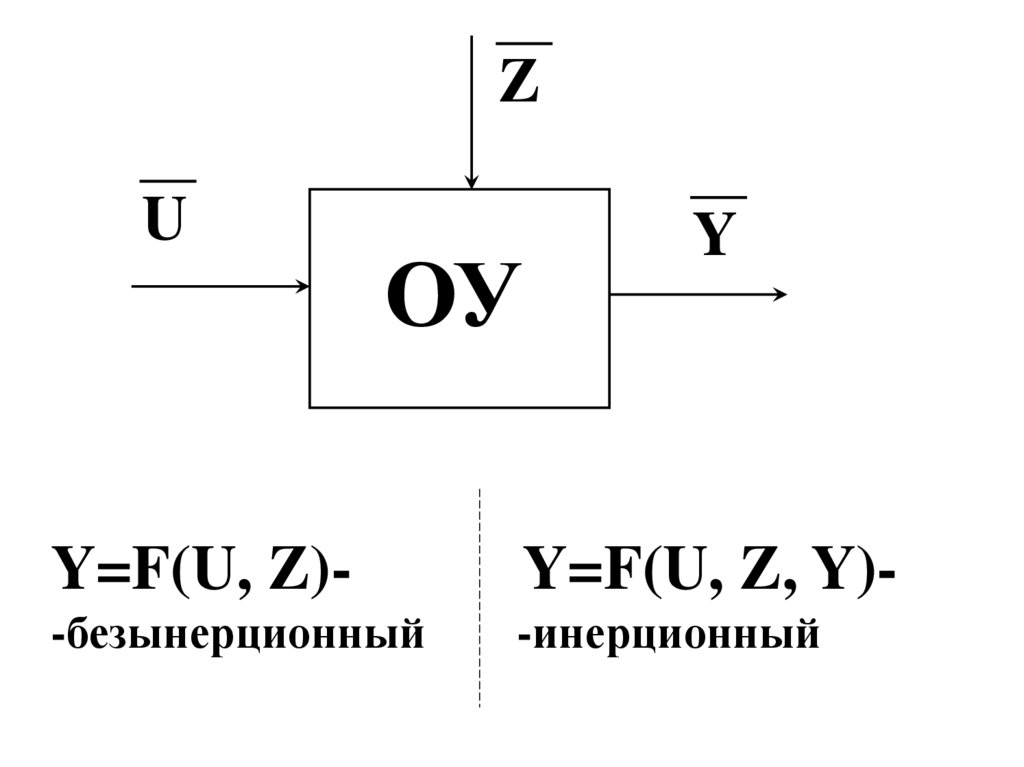
ZU
ОУ
Y
Y=F(U, Z)-
Y=F(U, Z, Y)-
-безынерционный
-инерционный
3.
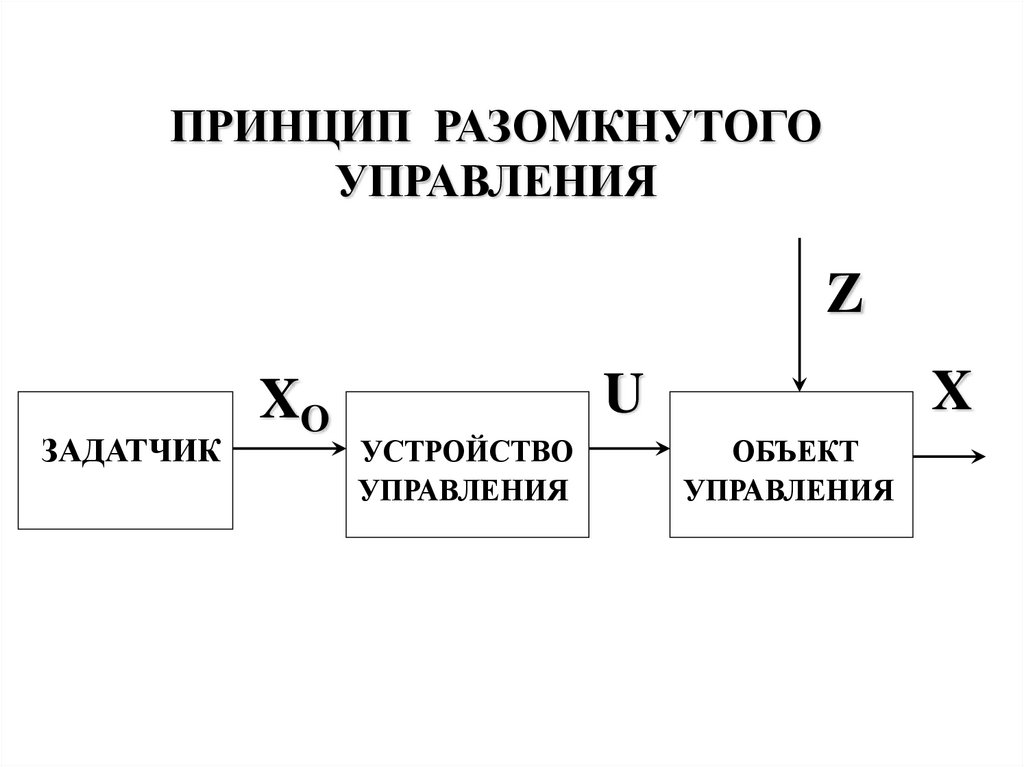
ПРИНЦИП РАЗОМКНУТОГОУПРАВЛЕНИЯ
Z
ЗАДАТЧИК
XO
X
U
УСТРОЙСТВО
УПРАВЛЕНИЯ
ОБЪЕКТ
УПРАВЛЕНИЯ
4.
ПРИНЦИП КОМПЕНСАЦИИВОЗМУЩЕНИЯ
ПРЕОБРАЗОВАТЕЛЬНОЕ УСТРОЙСТВО
U2
ЗАДАТЧИК
XO
УСТРОЙСТВО
УПРАВЛЕНИЯ
U1
U1–U2
ОБЪЕКТ
УПРАВЛЕНИЯ
Z
X
5.
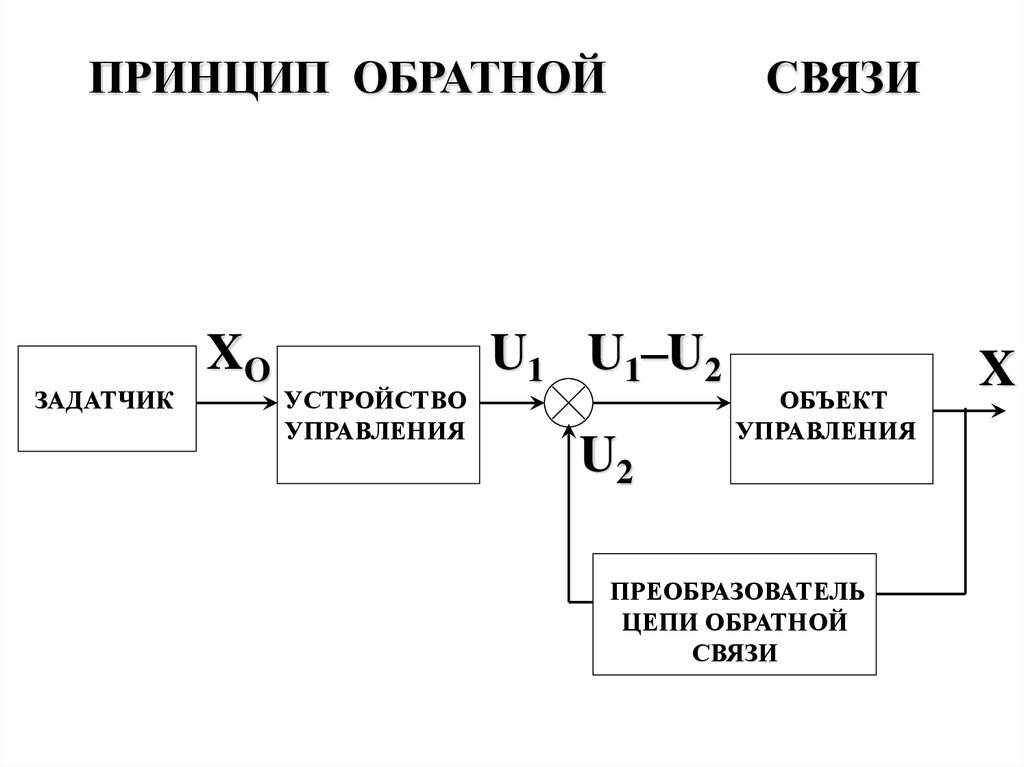
ПРИНЦИП ОБРАТНОЙЗАДАТЧИК
XO
УСТРОЙСТВО
УПРАВЛЕНИЯ
СВЯЗИ
U1 U1–U2
U2
ОБЪЕКТ
УПРАВЛЕНИЯ
ПРЕОБРАЗОВАТЕЛЬ
ЦЕПИ ОБРАТНОЙ
СВЯЗИ
X
6.
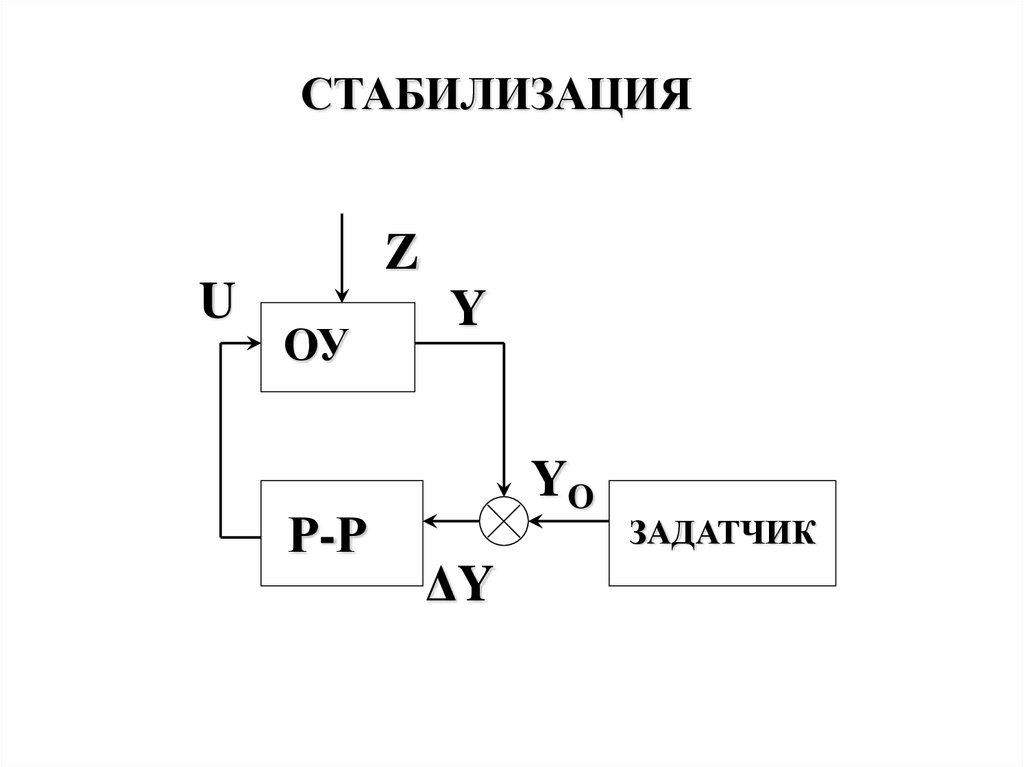
СТАБИЛИЗАЦИЯZ
U
ОУ
Р-Р
Y
YO
ΔY
ЗАДАТЧИК
7.
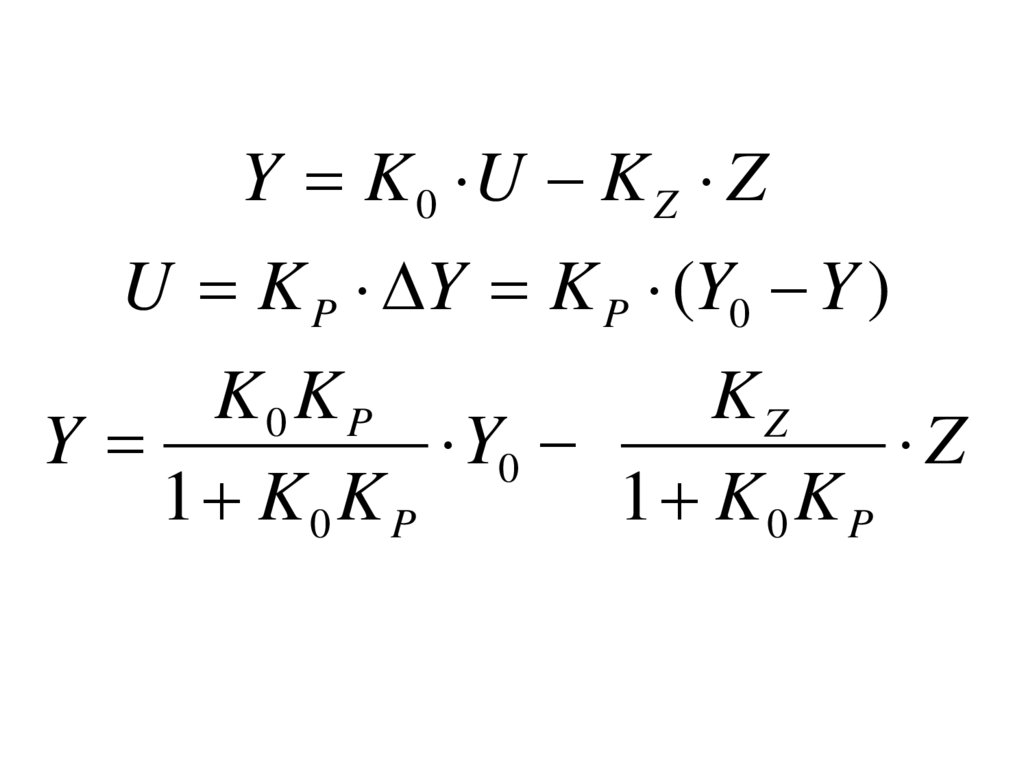
Y K 0 U K Z ZU K P Y K P (Y0 Y )
K0 K P
KZ
Y
Y0
Z
1 K0 K P
1 K0 K P
8.
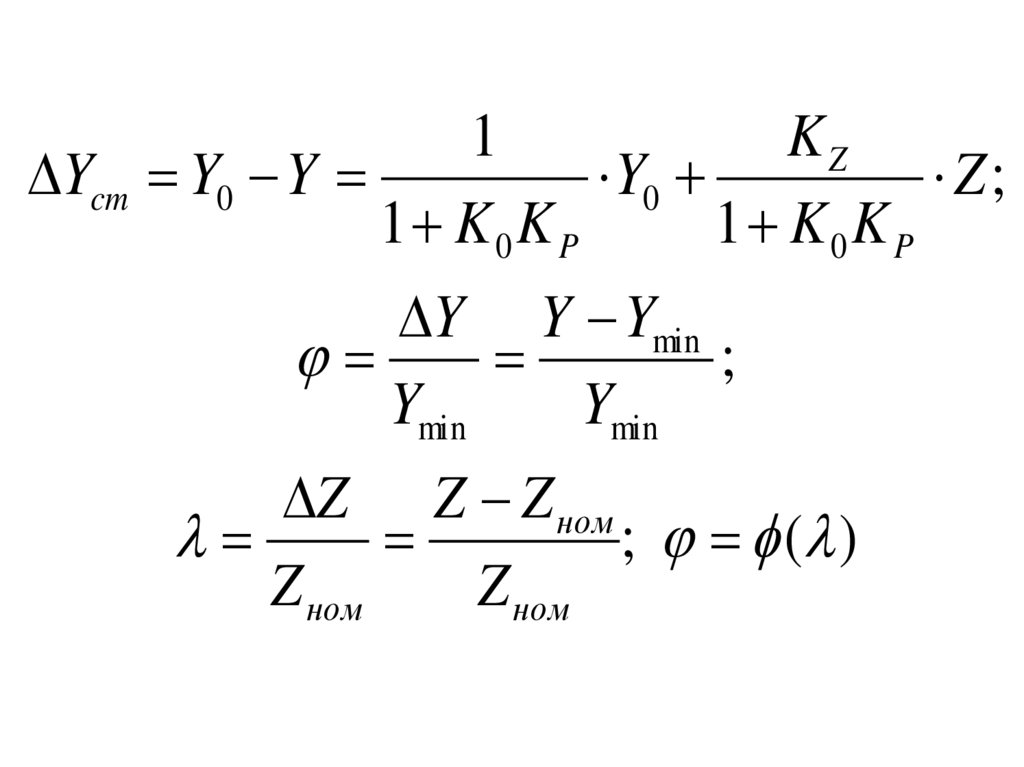
1KZ
Ycm Y0 Y
Y0
Z;
1 K0 K P
1 K0K P
Y Y Ymin
;
Ymin
Ymin
Z Z Z нoм
; ( )
Z нoм
Z нoм
9.
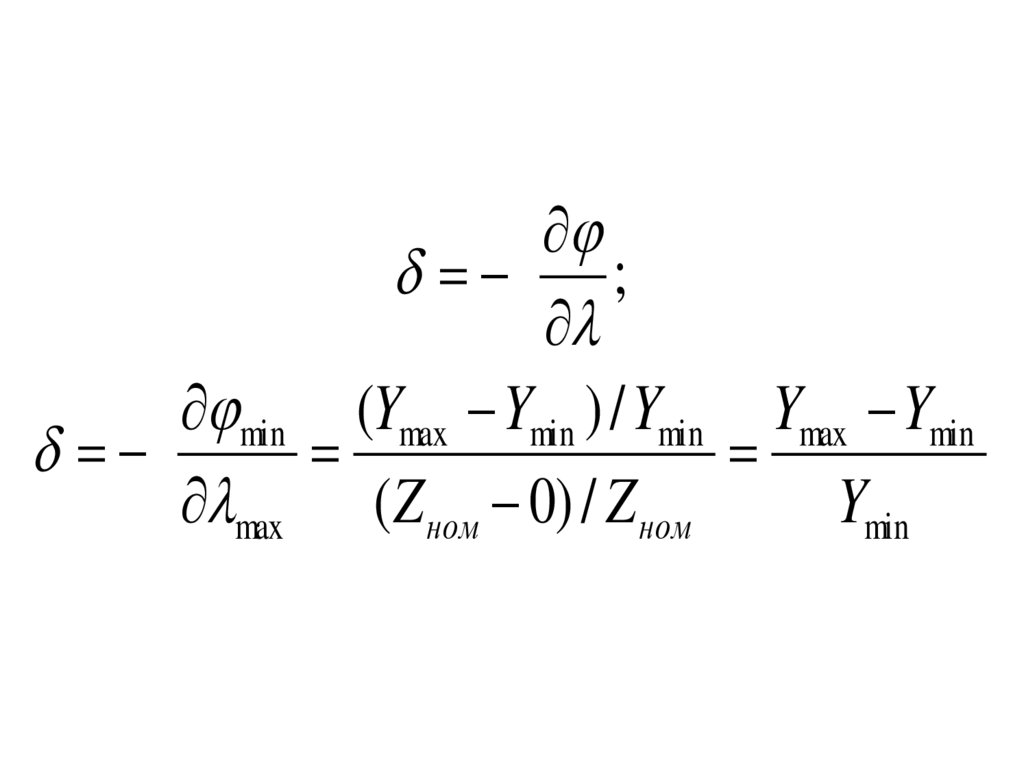
minmax
;
(Ymax Ymin ) / Ymin Ymax Ymin
( Z ном 0) / Z ном
Ymin
10.
tdU
U K Ydt
K Y
dt
0
11.
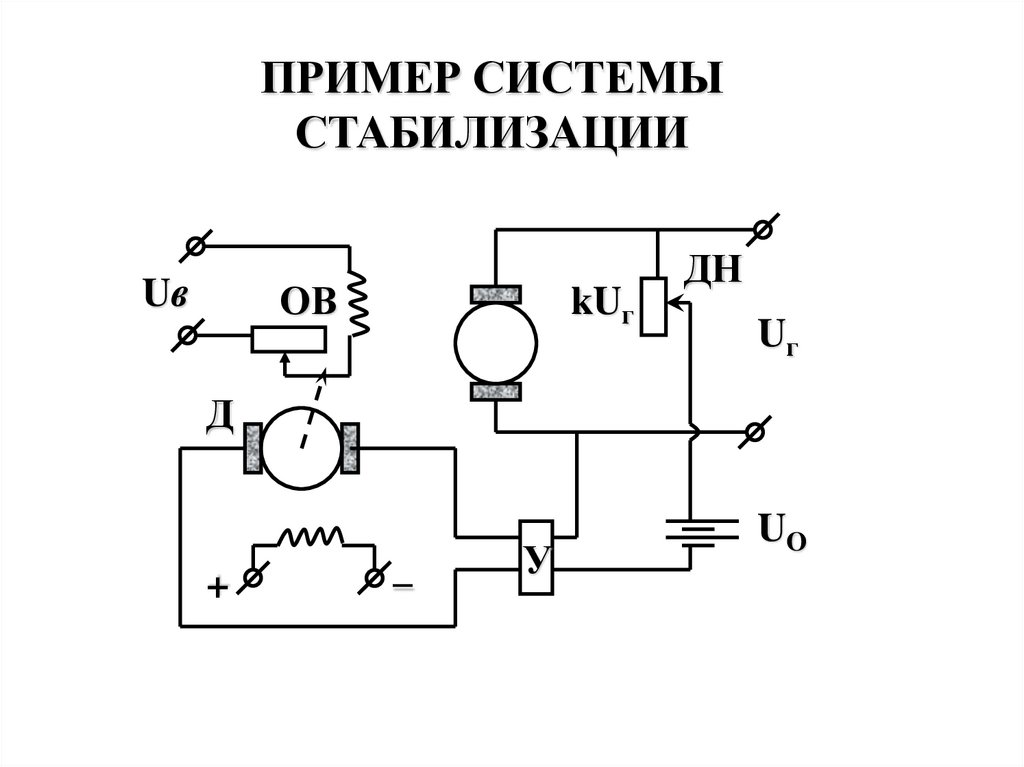
ПРИМЕР СИСТЕМЫСТАБИЛИЗАЦИИ
ОВ
Uв
kUг
ДН
Uг
Д
+
_
У
UO
12.
ДН – двигатель напряженияУ – усилитель
Д - двигатель постоянного тока
ОВ – обмотка возбуждения
13.
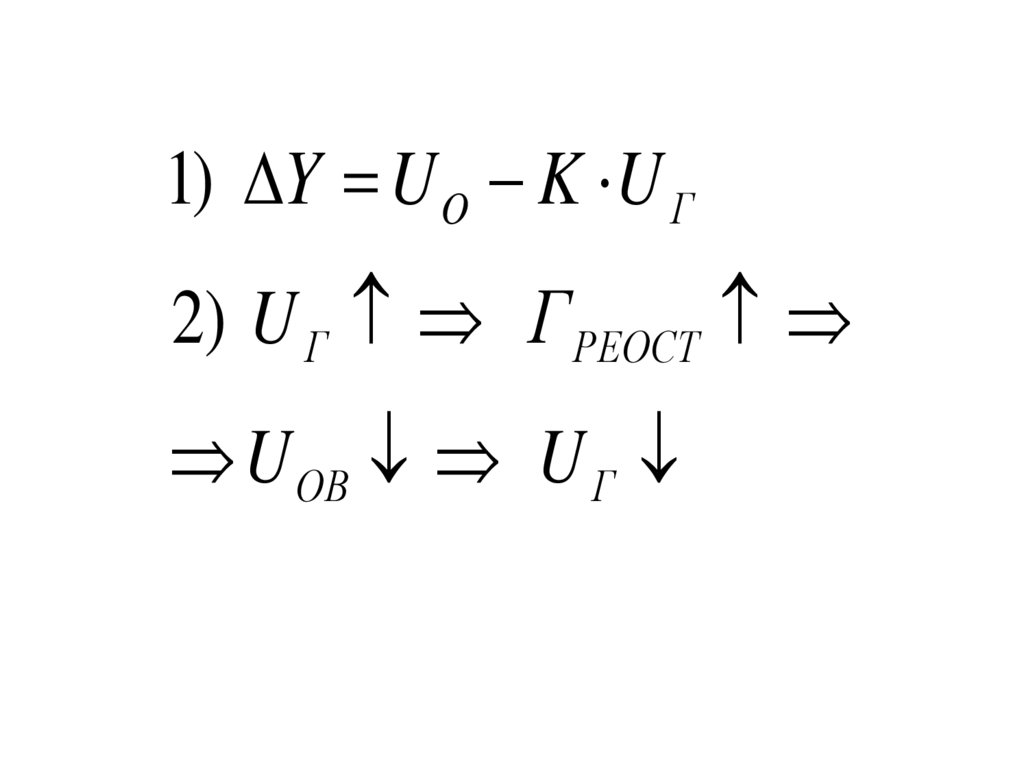
1) Y U O K U Г2) U Г Г РЕОСТ
U OВ U Г
14.
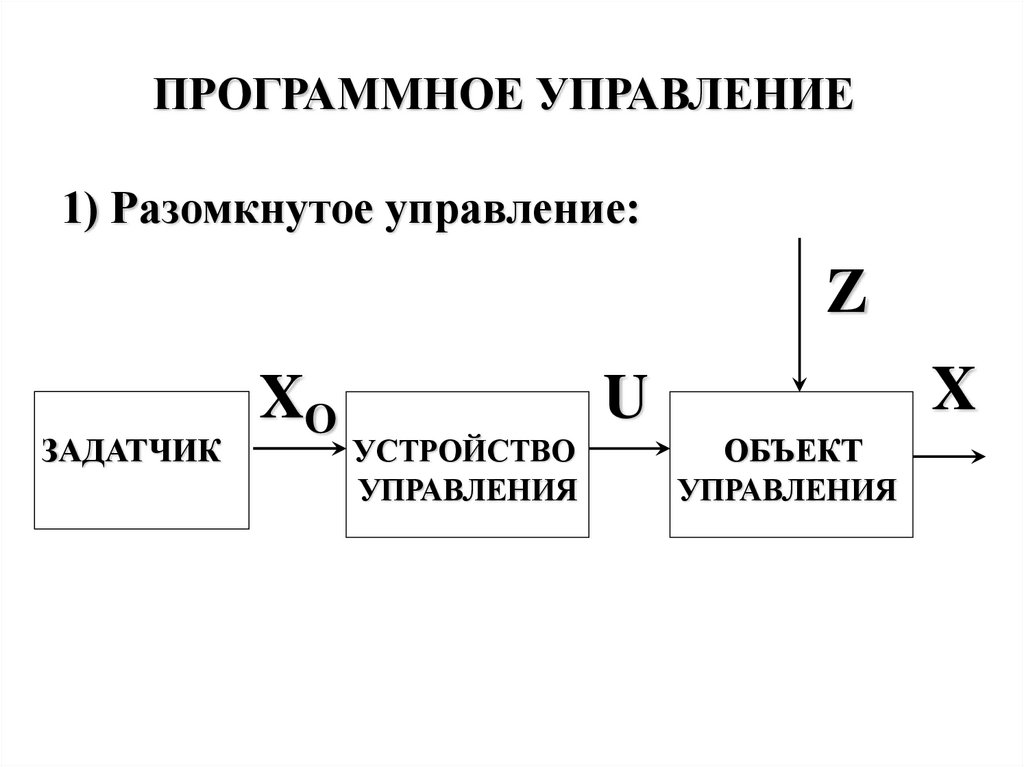
ПРОГРАММНОЕ УПРАВЛЕНИЕ1) Разомкнутое управление:
Z
ЗАДАТЧИК
XO
X
U
УСТРОЙСТВО
УПРАВЛЕНИЯ
ОБЪЕКТ
УПРАВЛЕНИЯ
15.
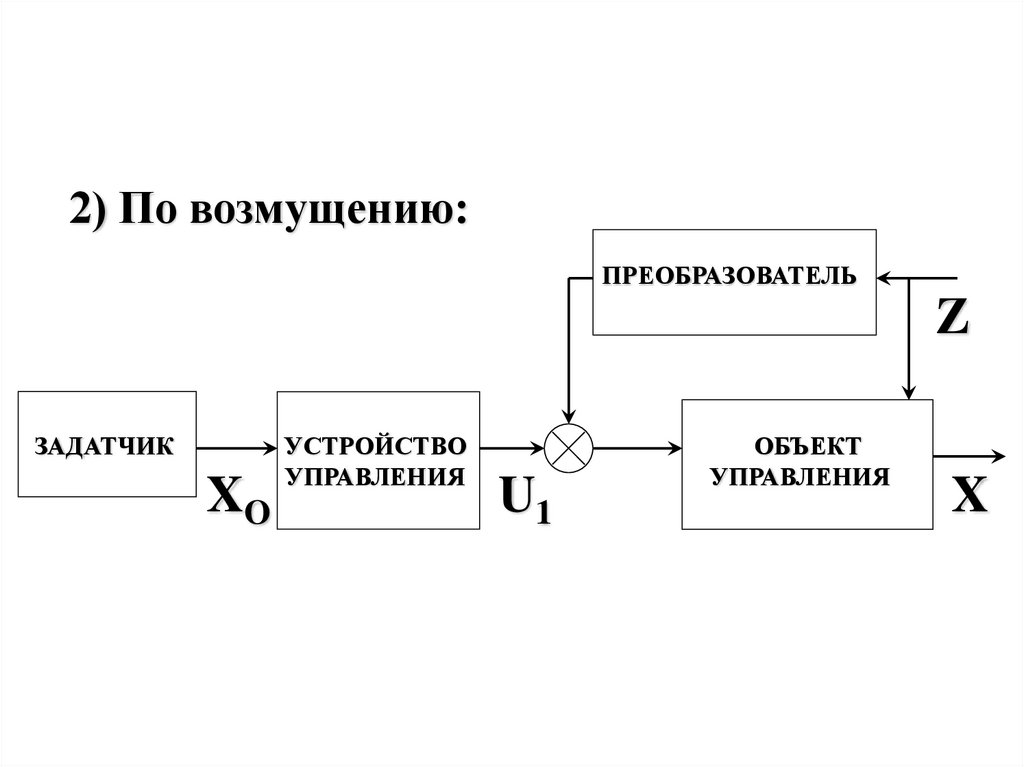
2) По возмущению:ПРЕОБРАЗОВАТЕЛЬ
Z
ЗАДАТЧИК
XO
УСТРОЙСТВО
УПРАВЛЕНИЯ
U1
ОБЪЕКТ
УПРАВЛЕНИЯ
X
16.
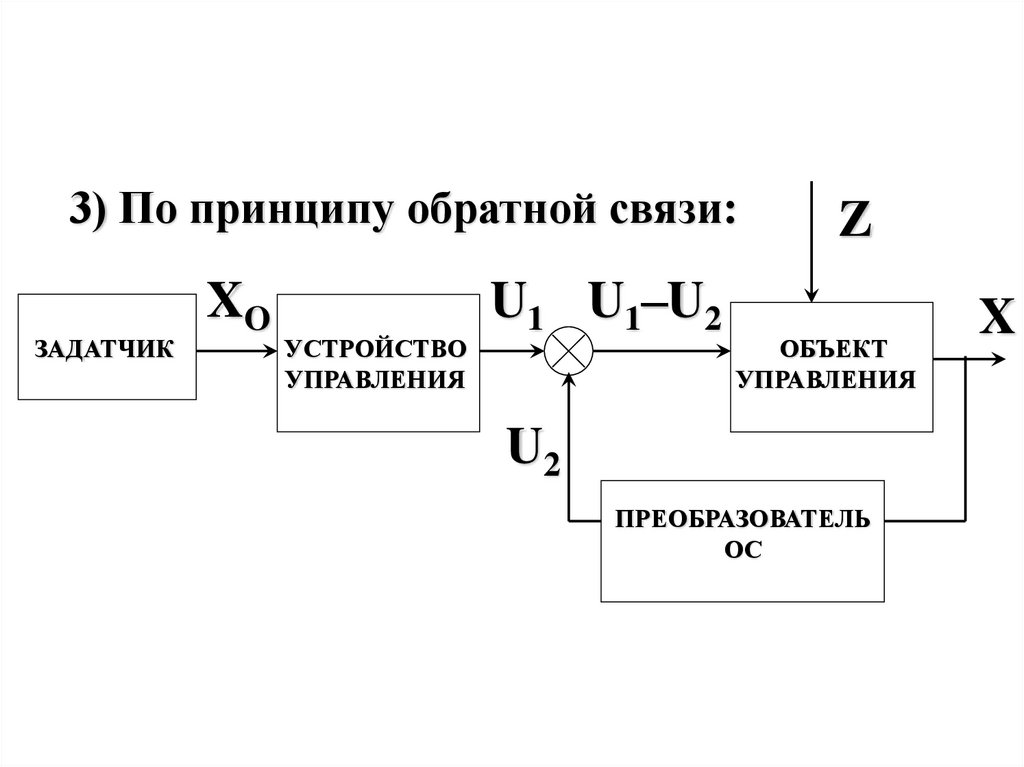
3) По принципу обратной связи:ЗАДАТЧИК
XO
УСТРОЙСТВО
УПРАВЛЕНИЯ
U1 U1–U2
Z
ОБЪЕКТ
УПРАВЛЕНИЯ
U2
ПРЕОБРАЗОВАТЕЛЬ
ОС
X
17.
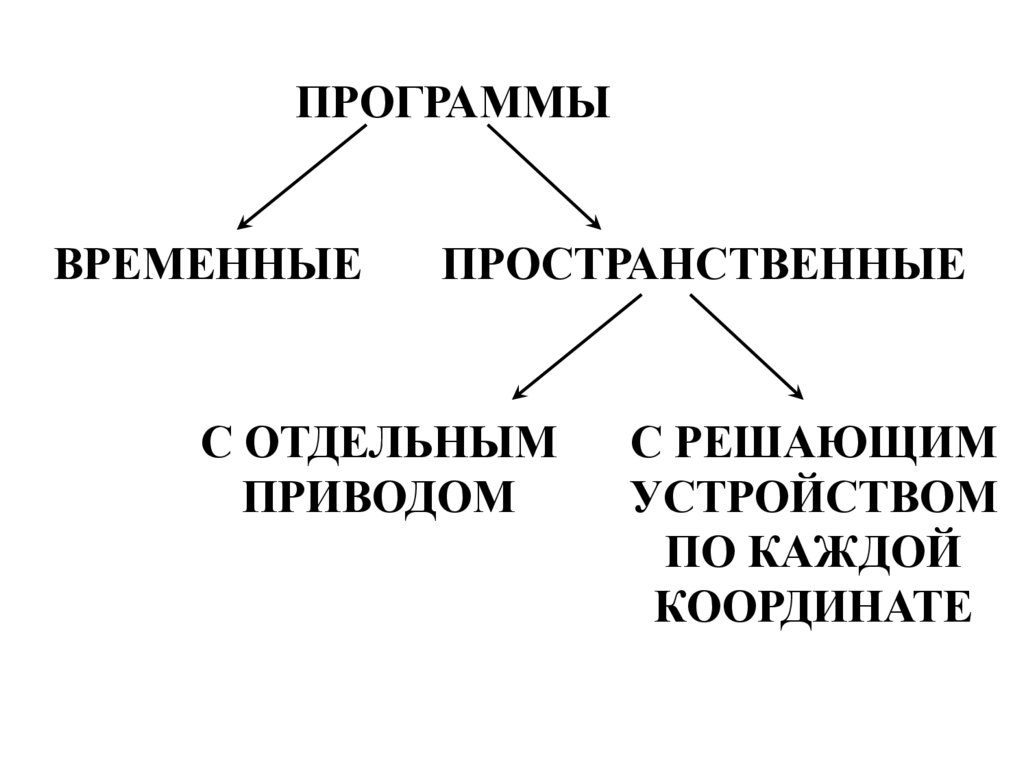
ПРОГРАММЫВРЕМЕННЫЕ
ПРОСТРАНСТВЕННЫЕ
С ОТДЕЛЬНЫМ
ПРИВОДОМ
С РЕШАЮЩИМ
УСТРОЙСТВОМ
ПО КАЖДОЙ
КООРДИНАТЕ
18.
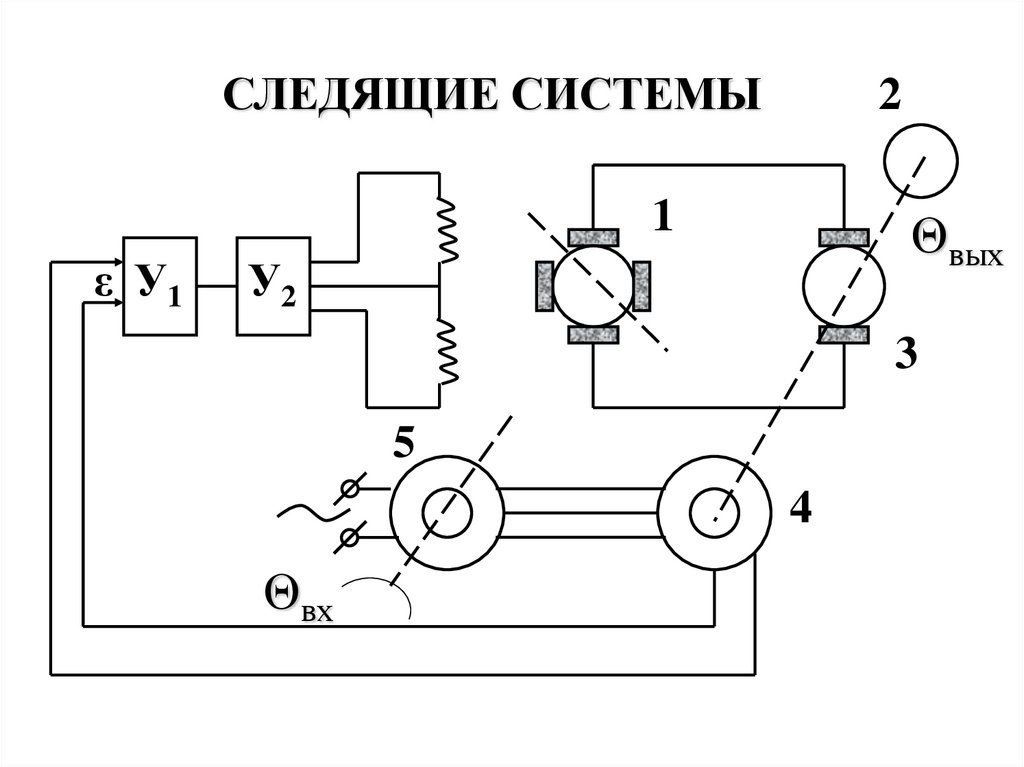
СЛЕДЯЩИЕ СИСТЕМЫ2
1
ε У1
Θвых
У2
3
5
4
Θвх
19.
1 – электромагнитный усилитель3 – приводной двигатель
4 – сельсин-приёмник
5 – сельсин-датчик
20.
в х в ых ; ; Y1 Y2ЭМУ исп. уст во ( якорь
исполнительного двигателя 3)
0
21.
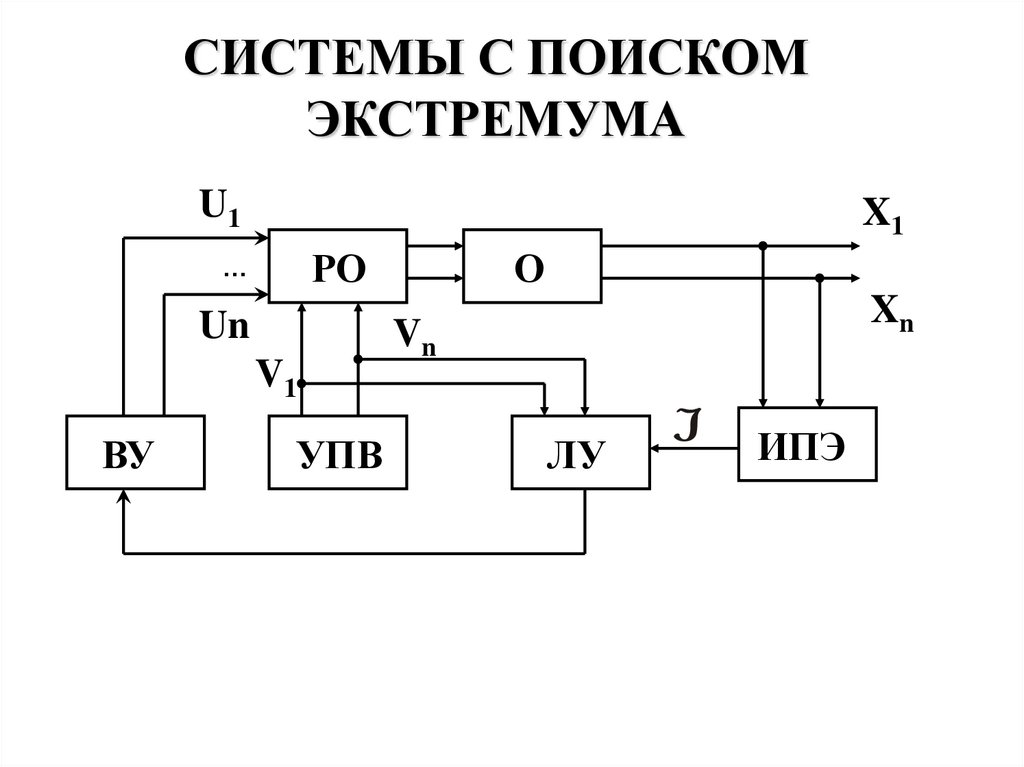
СИСТЕМЫ С ПОИСКОМЭКСТРЕМУМА
U1
X1
РО
…
Un
V1
ВУ
УПВ
О
Xn
Vn
ЛУ
ИПЭ
22.
ИПЭ – измерительно-преобразующийэлемент: = F(x1;…;xn)
УПВ – устройство пробных воздействий:
V1 ;…;Vn на систему
регулирующих
органов (РО)
23.
ЛУ – логическое устройствоВУ – вычислительное устройство
U;
Vi X i
24.
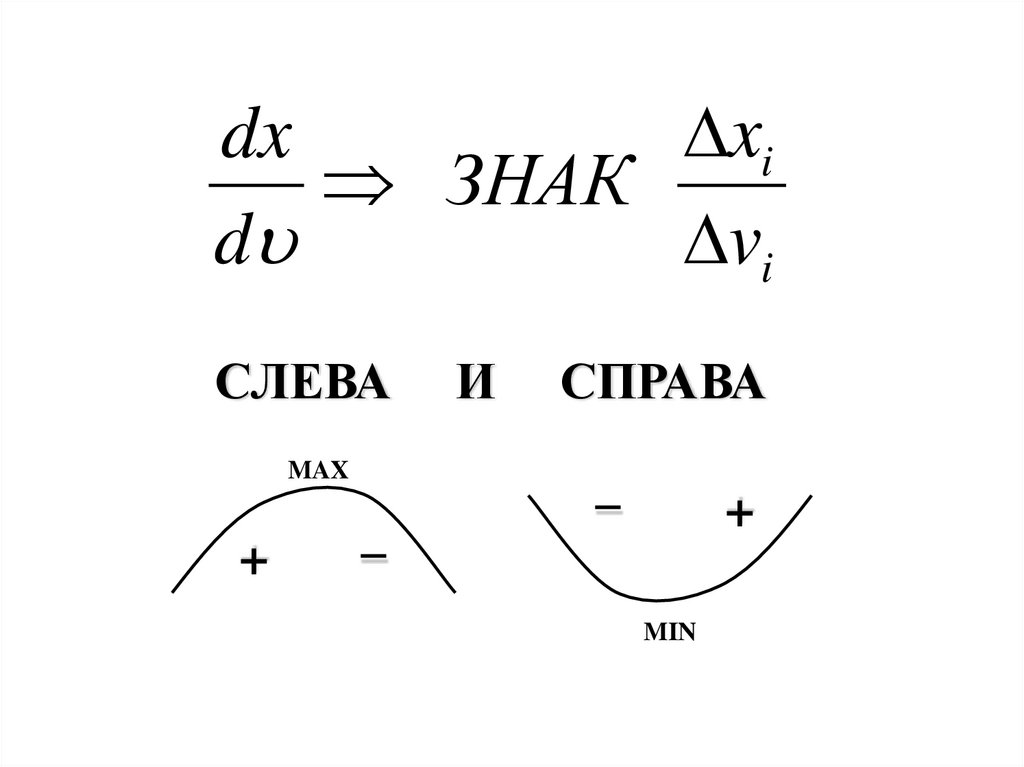
xidx
ЗНАК
d
vi
СЛЕВА
MAX
+
И
СПРАВА
_
+
_
MIN
25.
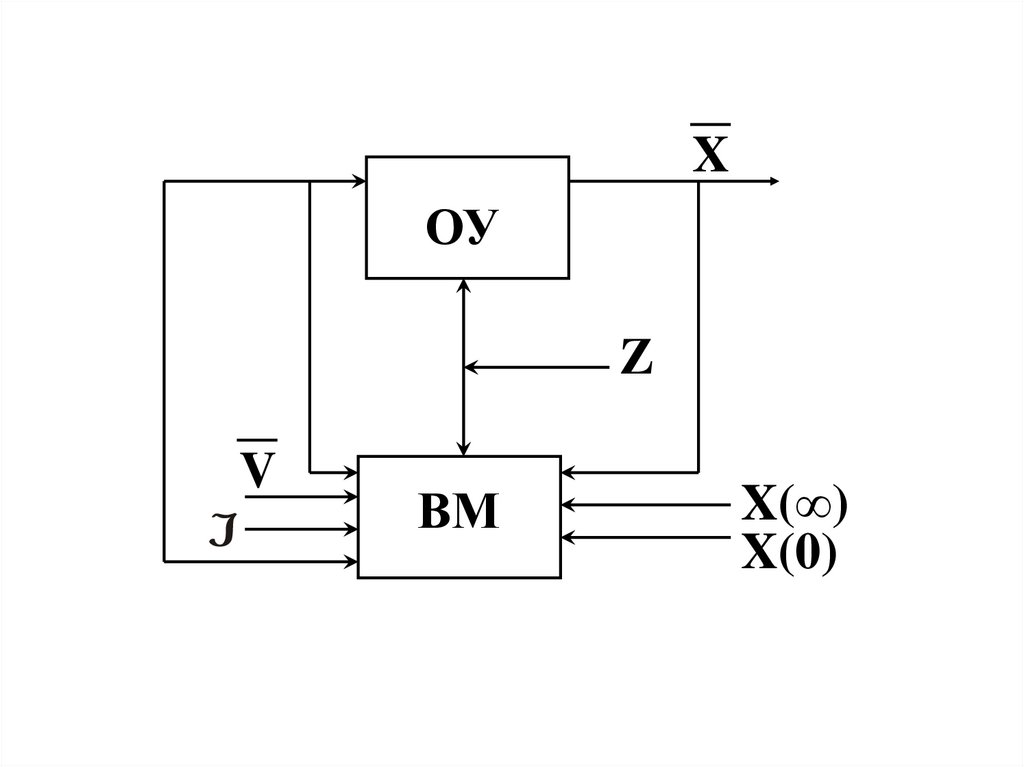
XОУ
Z
V
ВМ
X(∞)
X(0)
26.
V – дополнительная информация;– критерий оптимальности.
27.
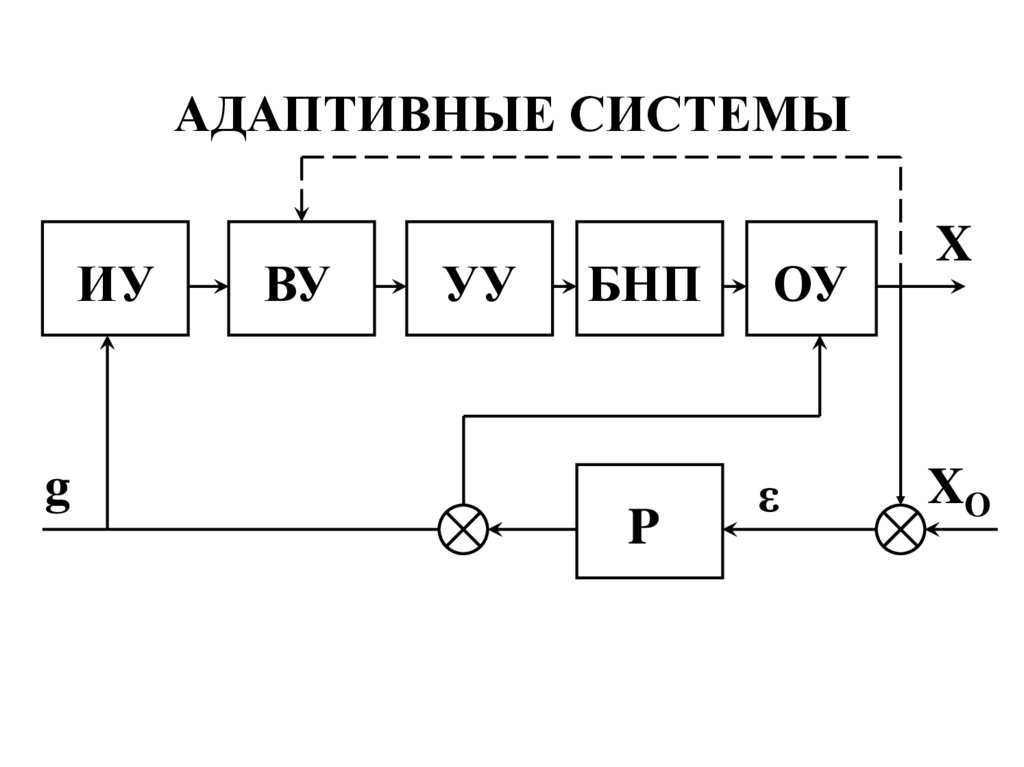
АДАПТИВНЫЕ СИСТЕМЫИУ
g
ВУ
УУ
БНП
P
ОУ
ε
X
XO
28.
КОНТУР АДАПТАЦИИ:- измерительное устройство (ИУ)
- вычислительное устройство (ВУ)
- управляющее устройство (УУ)
- блок настройки параметров (БНП)
(для замкнутого принципа)