



 physics
physicsSimilar presentations:









")
Аналитическая механика. Связи
1. Лекция 13
■Аналитическая механика – устанавливает общие, единые методы изучения движения и равновесия любых самых сложных материальных
систем средствами математического анализа. Для этого вводятся новые понятия и обобщаются старые.
■
Связи – рассматриваются теперь как некоторые условия, налагаемые на систему, которые должны удовлетворяться в процессе движения
системы. Они содержат соотношения (уравнения или неравенства) между координатами, компонентами скоростей и ускорений и,
возможно, времени.
Классификация связей: По интегрируемости:
Голономные (геометрические) – выражаются конечными уравнениями относительно координат или интегрируемыми дифференциальными
уравнениями относительно координат:
(x , y , z , t) 0
k
k
k
Неголономные (кинематические) - выражаются неинтегрируемыми дифференциальными уравнениями относительно координат,
( xk , yk , zk , x k , y k , z k , t ) 0
т.е. уравнениями, содержащими не только координаты точек системы, но и их производные по времени:
Неинтегрируемость состоит в том, что их нельзя привести к виду уравнений голономной связи.
По зависимости от времени:
( xk , yk , zk ) 0
Склерономные (стационарные) – не зависящие от времени:
Например, уравнение траектории, полученное для некоторой точки шатуна кривошипно-шатунного механизма:
Если
на систему N точек в пространстве наложено m голономных связей,
2
x то
y2
рассматривается как уравнение cклерономной голономной связи:
декартовые координаты всегда могут быть выражены конечными
2 1
2
a соотношениями:
b
x1 x1 (q1 , колебаний.
q2 ,..., qn , t );
Реономные (нестационарные) – зависящие от времени. Например, кинематическое возбуждение
По освобождаемости:
x2 x2 (q1 , q2 ,..., qn , t ); Число обобщенных координат
Неосвобождающие (удерживающие или двухсторонние) – описываются уравнением, исключающим возможностьравно
покидания
n = 3Nточкой
– m. траектории
..................................;
или поверхности, описываемой уравнением. Этому соответствует, например, жесткая связь в виде шарнирного стержня.
x N x1 (q1 , q2 ,..., qn , tсвязь
).
Освобождающие (неудерживающие или односторонние) – выражаются неравенством, 3регламентирующим
лишь в одном направлении,
например, гибкая нить или гладкая поверхность.
■
■
Обобщенные координаты – независимые параметры, однозначно определяющее положение механической системы при ее движении.
Обобщенность состоит в том, что они могут иметь различную природу (линейные или угловые перемещения относительно некоторого
начального положения или какие-либо другие величины). Общее обозначение – qi (i = 1,…,n).
Число степеней свободы – число независимых обобщенных координат, через которые можно выразить декартовые координаты всех точек
системы. Например:
x A l cos ; Здесь положение любой точки стержня (например, А) однозначно определяется
y
xA
значением всего одной величины – угла , который является обобщенной
A y A l sin
координатой (q = ). Число степеней свободы равно n = 1.
l
Уравнение связи для рассматриваемой точки A:
yA
x2 y 2 l 2
x
O
15
2.
Лекция 13 (продолжение – 13.2)■
Возможные перемещения – бесконечно малые перемещения, допускаемые наложенными на систему связями.
С точностью до бесконечно малых приращения радиуса-вектора лежат в касательной плоскости к поверхности
связи и представляют собой возможные перемещения. В случае нестационарной голономной связи f(x,y,z,t) = 0
возможные перемещения рассматриваются для положения и формы поверхности связи, соответствующих данному
моменту времени. Возможные перемещения не зависят от приложенных к системе сил.
r
f ( x, y , z ) 0
r
■
Действительные перемещения – бесконечно малые (элементарные) перемещения, действительно (фактически)
происходящие за время dt, допускаемые наложенными на систему связями. Действительные перемещения зависят от
сил, приложенных к системе, от вида связей (стационарных, нестационарных, голономных, неголономных) и начальных
условий. Таким образом, возможные перемещения являются более общим понятием, чем действительные перемещения.
ds бs
Поскольку вектор положения точки системы можно выразить через обобщенные координаты rk rk (q1 , q2 ,..., qn ) ,
то возможные перемещения выражаются через приращения обобщенных координат как полный дифференциал:
T
rk
O
l
rk
r
r
q1 k q2 ... k qn
q1
q2
qn
O
■
A
n
rk
i 1
rk
qi .
qi
■
Вычисление возможных перемещений:
Геометрический способ - в силу малости возможных перемещений при повороте твердого тела любая его точка может
рассматриваться движущейся не по дуге, а по перпендикуляру к радиусу вращения в сторону угла поворота:
бxA
x A l l cos ; Для малых углов cos ≈ 1, sin ≈ , тогда: x A 0;
бsA
y A l sin .
y A s A l .
A
y
бyA
x
Например, для наклонного стержня:
A
бyA=бsA
s A l . x A s A sin l sin ;
l бxA
O
Аналитический способ – вычисляется вариация от координат:
y
x A l cos ;
xA
x A
(l cos ) l sin ;
A
y l sin
l
или
yA
x
y A
(l sin ) l cos .
x
y A s A cos l cos .
В отличие от геометрического способа знаки возможного
приращения координат получаются автоматически. При
использовании геометрического способа в дальнейших
вычислениях, например, работы, необходимо учитывать
направление полученного приращения (перемещения).
Возможная работа силы – элементарная работа силы на том или ином возможном перемещении:
В координатном виде:
A X x Y y Z z.
В естественном виде:
A F s cos( F , r ).
A F r .
16
3.
Лекция 13 (продолжение – 13.3)■
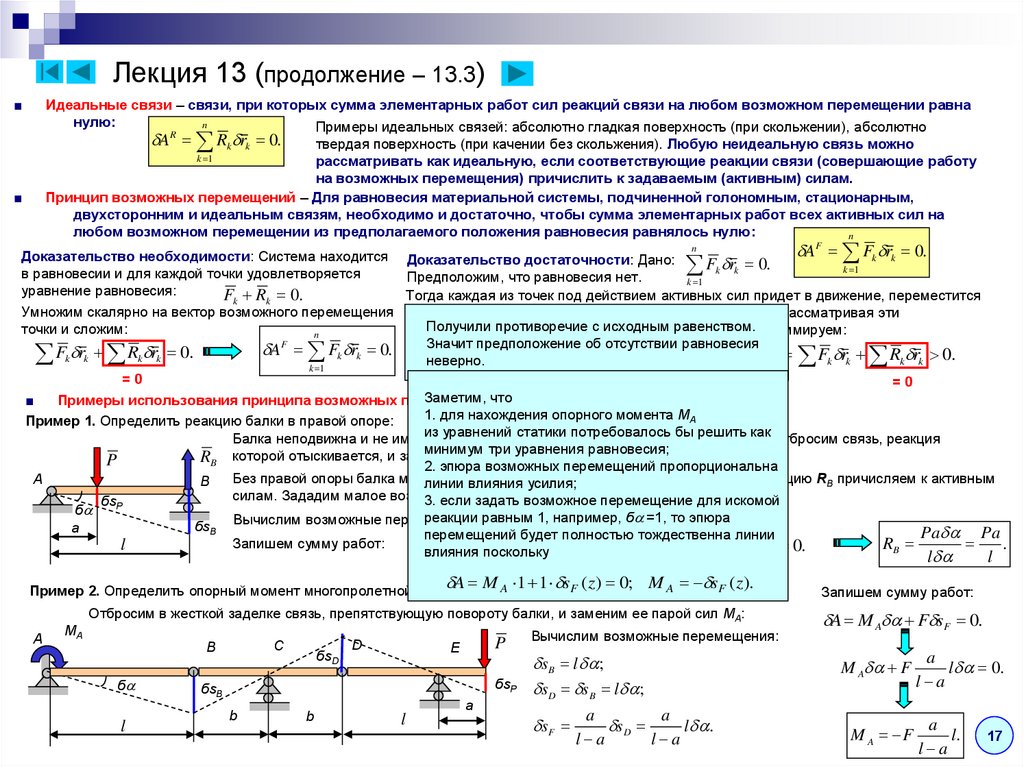
Идеальные связи – связи, при которых сумма элементарных работ сил реакций связи на любом возможном перемещении равна
нулю:
n
Примеры идеальных связей: абсолютно гладкая поверхность (при скольжении), абсолютно
A R Rk rk 0.
твердая поверхность (при качении без скольжения). Любую неидеальную связь можно
рассматривать как идеальную, если соответствующие реакции связи (совершающие работу
на возможных перемещения) причислить к задаваемым (активным) силам.
Принцип возможных перемещений – Для равновесия материальной системы, подчиненной голономным, стационарным,
двухсторонним и идеальным связям, необходимо и достаточно, чтобы сумма элементарных работ всех активных сил на
любом возможном перемещении из предполагаемого положения равновесия равнялось нулю:
n
k 1
■
n
Доказательство необходимости: Система находится
в равновесии и для каждой точки удовлетворяется
уравнение равновесия:
Fk Rk 0.
Умножим скалярно на вектор возможного перемещения
точки и сложим:
n
F r R r
k
k
k
k
A F F r 0.
k k
Доказательство достаточности: Дано:
Fk rk 0.
k 1
Предположим, что равновесия нет.
k 1
Тогда каждая из точек под действием активных сил придет в движение, переместится
за время dt на малое действительное перемещение dr. Рассматривая эти
Получили противоречие
с исходным
перемещения,
как возможные,
вычислимравенством.
работу и просуммируем:
F
Значит
предположение
об
отсутствии
равновесия
A Fk rk 0. ( F R )dr ( F R ) r 0.
( Fk Rk ) rk Fk rk Rk rk 0.
kневерно.
k
k
k
k
k
k 1
0.
=0
=0
Заметим, что
■
Примеры использования принципа возможных перемещений
для определения реакций связей:
1. для нахождения опорного момента MA
Пример 1. Определить реакцию балки в правой опоре:
изни
уравнений
статики
потребовалось перемещений.
бы решить как Отбросим связь, реакция
Балка неподвижна и не имеет
возможных,
ни действительных
минимум
три
уравнения
равновесия;
RB которой отыскивается, и заменим ее реакцией:
P
2. эпюра возможных перемещений пропорциональна
Без правой опоры балка может
поворачиваться
под действием активных сил, реакцию RB причисляем к активным
A
B
линии
влияния усилия;
силам.
Зададим
малое
возможное
перемещение:
3. если задать возможное перемещение для искомой
бsP
б
реакции равным 1, например, б =1, то эпюра
бsB Вычислим возможные перемещения: sP a ; sB l .
a
Pa Pa
перемещений
будет полностью тождественна линии
P R
Запишем сумму работ:
RB
.
l
Pa RBl 0.
Aвлияния
P поскольку
sP RB sB 0.
l
l
A M 1 1 s ( z) 0; M A s F ( z).
A
F опоре:
Пример 2. Определить опорный момент многопролетной составной балке
в левой
Отбросим в жесткой заделке связь, препятствующую повороту балки, и заменим ее парой сил MA:
A
MA
C
B
б
l
бsD
D
P
E
бsP
бsB
b
b
a
l
Вычислим возможные перемещения:
s B l ;
s D s B l ;
s F
a
a
s D
l .
l a
l a
Запишем сумму работ:
A M A F sF 0.
M A F
M A F
a
l 0.
l a
a
l.
l a
17
4. Лекция 14
■Общее уравнение динамики – Принцип возможных перемещений, дающий общий метод решения задач статики, можно применить к
решению задач динамики, а именно:
1. Применить принцип Даламбера, сводящий задачу динамики с задаче статики: Pk Rk k 0; (k 1,2,..., N )
2. Применить принцип возможных перемещений, решающий эту статическую задачу:
Pk s k cos( Pk , s k ) Rk s k cos( Rk , s k ) k s k cos( k , s k ) 0; (k 1,2,..., N )
Просуммируем по всем точкам:
Получим
общее уравнение динамики:
Более короткие записи
общего уравнения динамики:
A 0,
Или еще короче:
Pk s k cos( Pk , s k ) Rk s k cos( Rk , s k ) k s k cos( k , s k ) 0.
= 0 – для идеальных связей
Pk s k cos( Pk , s k ) k s k cos( k , s k ) 0.
( Pk k ) rk 0
( Pk mk ak ) rk 0.
или
В любой момент времени сумма работ всех задаваемых
сил и сил инерции несвободной механической системы с
двухсторонними идеальными связями на любом
возможном перемещении равна нулю.
где бA – возможная работа всех задаваемых сил и сил инерции на любом возможном перемещении.
Пример. Центробежный регулятор вращается вокруг вертикальной оси с постоянной скоростью. При = 0 пружина не деформирована.
Жесткость пружины c. Длина каждого из стержней l. Плечо подвески a. Вес каждого из шаров G, вес муфты G1. Определить угловую
скорость установившегося вращения для данного угла .
G
G
1. Покажем заданные силы:
maос ;
2. Добавим силы инерции:
maос 2 (a l sin ).
g
x
3. Упругая связь (пружина), не являющаяся идеальной (совершает работу на возможных перемещениях), должна
быть отброшена и заменена реакцией, которая включается в число заданных сил:
R
l
a
a ос A
Модуль реакции пружины пропорционален изменению
a ос
длины (укорочению) пружины:
R c l c(2l 2l cos ) 2cl (1 cos ).
4.
Определим
проекции
возможных
перемещений
G
x A l cos ;
x A a l sin ;
R
(вариации координат) точек приложения сил:
l
G1
B
y
5. Составим общее уравнение динамики:
A 2G y A (G1 R) y B 2 x A 0
Подставим значения сил инерции
и реакции пружины:
y A l cos ;
y B 2l cos .
2G( l sin ) (G1 2cl (1 cos ))( 2l sin ) 2
Отсюда после некоторых сокращений
и упрощений:
(G G1 2cl (1 cos )) g tg
G (a l sin )
y A l sin ;
y B 2l sin .
G 2
(a l sin )l cos 0
g
18
5.
Лекция 14 (продолжение – 14.2)■
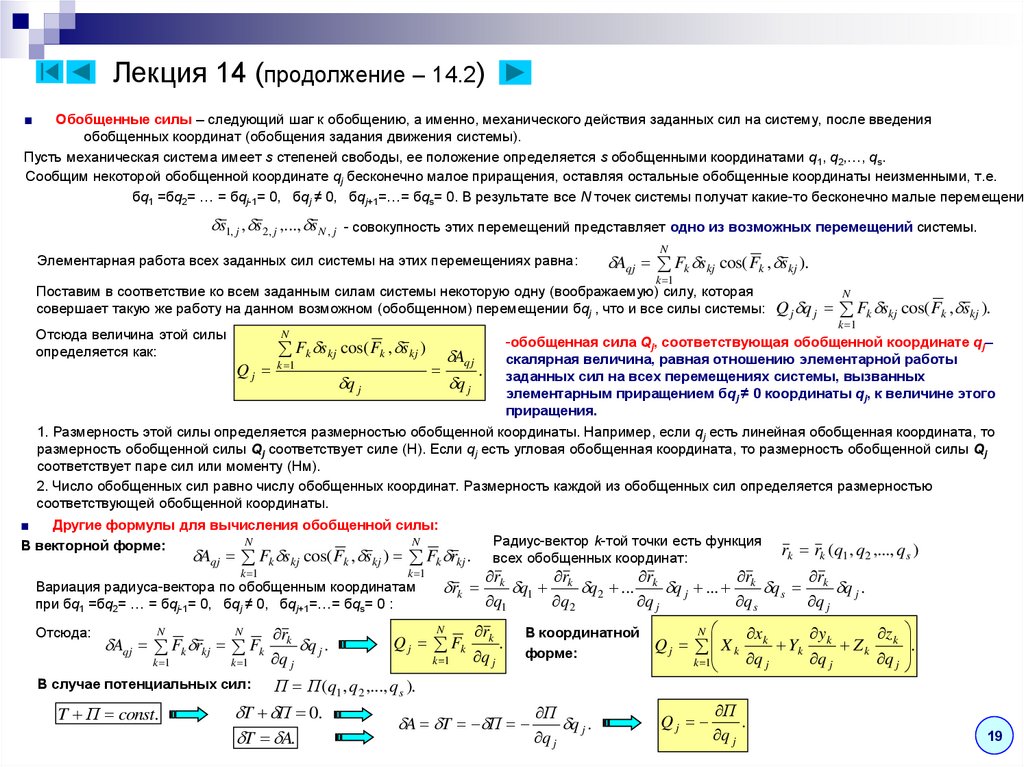
Обобщенные силы – следующий шаг к обобщению, а именно, механического действия заданных сил на систему, после введения
обобщенных координат (обобщения задания движения системы).
Пусть механическая система имеет s степеней свободы, ее положение определяется s обобщенными координатами q1, q2,…, qs.
Сообщим некоторой обобщенной координате qj бесконечно малое приращения, оставляя остальные обобщенные координаты неизменными, т.е.
бq1 =бq2= … = бqj-1= 0, бqj ≠ 0, бqj+1=…= бqs= 0. В результате все N точек системы получат какие-то бесконечно малые перемещения
s1, j , s 2, j ,..., s N , j
- совокупность этих перемещений представляет одно из возможных перемещений системы.
Элементарная работа всех заданных сил системы на этих перемещениях равна:
N
Aqj Fk skj cos( Fk , skj ).
k 1
Поставим в соответствие ко всем заданным силам системы некоторую одну (воображаемую) силу, которая
совершает такую же работу на данном возможном (обобщенном) перемещении бqj , что и все силы системы:
Отсюда величина этой силы
определяется как:
N
N
Q j q j Fk skj cos( Fk , skj ).
k 1
-обобщенная сила Qj, соответствующая обобщенной координате qj–
скалярная величина, равная отношению элементарной работы
Qj
. заданных сил на всех перемещениях системы, вызванных
q j
q j
элементарным приращением бqj ≠ 0 координаты qj, к величине этого
приращения.
1. Размерность этой силы определяется размерностью обобщенной координаты. Например, если qj есть линейная обобщенная координата, то
размерность обобщенной силы Qj соответствует силе (Н). Если qj есть угловая обобщенная координата, то размерность обобщенной силы Qj
соответствует паре сил или моменту (Нм).
2. Число обобщенных сил равно числу обобщенных координат. Размерность каждой из обобщенных сил определяется размерностью
соответствующей обобщенной координаты.
Fk s kj cos( Fk , s kj )
Aqj
k 1
■
Другие формулы для вычисления обобщенной силы:
N
N
В векторной форме:
Радиус-вектор k-той точки есть функция
всех обобщенных координат:
Aqj Fk skj cos( Fk , skj ) Fk rkj .
k 1
k 1
Вариация радиуса-вектора по обобщенным координатам
при бq1 =бq2= … = бqj-1= 0, бqj ≠ 0, бqj+1=…= бqs= 0 :
Отсюда:
N
N
k 1
k 1
Aqj Fk rkj Fk
В случае потенциальных сил:
T П const.
rk
q j .
q j
rk
N
Q j Fk
k 1
rk rk (q1 , q2 ,..., q s )
rk
r
r
r
r
q1 k q 2 ... k q j ... k q s k q j .
q1
q 2
q j
q s
q j
rk
.
q j
В координатной
форме:
N
x
y
z
Q j X k k Yk k Z k k
q j
q j
q j
k 1
.
П П (q1 , q2 ,..., q s ).
T П 0.
T A.
A T П
П
q j .
q j
Qj
П
.
q j
19
6.
Лекция 14 (продолжение – 14.3)■
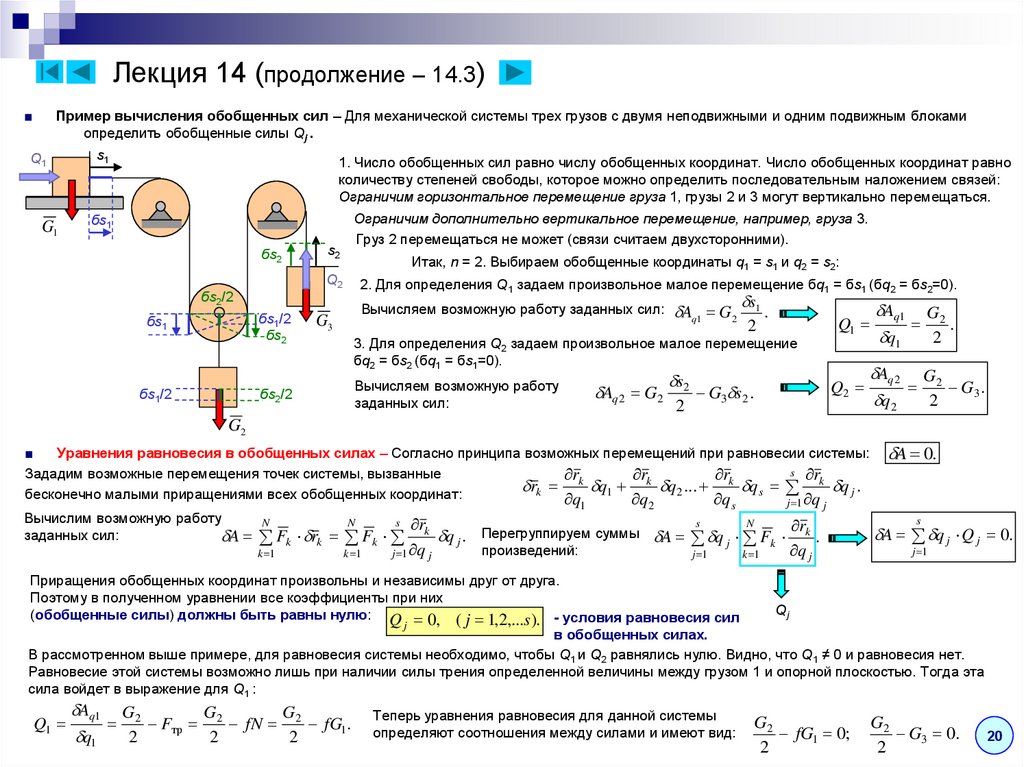
Пример вычисления обобщенных сил – Для механической системы трех грузов с двумя неподвижными и одним подвижным блоками
определить обобщенные силы Qj .
Q1
G1
s1
1. Число обобщенных сил равно числу обобщенных координат. Число обобщенных координат равно
количеству степеней свободы, которое можно определить последовательным наложением связей:
Ограничим горизонтальное перемещение груза 1, грузы 2 и 3 могут вертикально перемещаться.
Ограничим дополнительно вертикальное перемещение, например, груза 3.
Груз 2 перемещаться не может (связи считаем двухсторонними).
бs1
бs2
бs1/2
бs2
бs1/2
Итак, n = 2. Выбираем обобщенные координаты q1 = s1 и q2 = s2:
Q2
бs2/2
бs1
s2
2. Для определения Q1 задаем произвольное малое перемещение бq1 = бs1 (бq2 = бs2=0).
Вычисляем возможную работу заданных сил:
G3
Aq1 G2
s1
2
.
Q1
3. Для определения Q2 задаем произвольное малое перемещение
бq2 = бs2 (бq1 = бs1=0).
Вычисляем возможную работу
заданных сил:
бs2/2
Aq 2 G2
s2
2
Q2
G3 s2 .
Aq1
q1
Aq 2
q 2
G2
.
2
G2
G3 .
2
G2
■
Уравнения равновесия в обобщенных силах – Согласно принципа возможных перемещений при равновесии системы:
s r
Зададим возможные перемещения точек системы, вызванные
rk
rk
rk
k
r
q
q
...
q
q j .
k
1
2
s
бесконечно малыми приращениями всех обобщенных координат:
q
q
q
q
Вычислим возможную работу
N
N
s r
заданных сил:
A Fk rk Fk k
k 1
k 1
j 1 q j
1
q j .
Перегруппируем суммы
произведений:
2
j 1
s
s
N
j 1
k 1
A q j Fk
A 0.
j
rk
.
q j
s
A q j Q j 0.
j 1
Приращения обобщенных координат произвольны и независимы друг от друга.
Поэтому в полученном уравнении все коэффициенты при них
Qj
(обобщенные силы) должны быть равны нулю: Q 0, ( j 1,2,...s ). - условия равновесия сил
j
в обобщенных силах.
В рассмотренном выше примере, для равновесия системы необходимо, чтобы Q1 и Q2 равнялись нулю. Видно, что Q1 ≠ 0 и равновесия нет.
Равновесие этой системы возможно лишь при наличии силы трения определенной величины между грузом 1 и опорной плоскостью. Тогда эта
сила войдет в выражение для Q1 :
Q1
Aq1
q1
G2
G
G
Fтр 2 fN 2 fG1 .
2
2
2
Теперь уравнения равновесия для данной системы
определяют соотношения между силами и имеют вид:
G2
fG1 0;
2
G2
G3 0.
2
20
7. Лекция 15
■Уравнение Лагранжа II рода – Уравнения представляют собой дифференциальные уравнения движения системы относительно обобщенных
координат системы. Воспользуемся общим уравнением динамики:
A 0, где бA – возможная работа всех задаваемых сил
1. Зададим возможные перемещения точек системы, вызванные
бесконечно малыми приращениями всех обобщенных координат:
и сил инерции на любом возможном перемещении.
s r
rk
r
r
q1 k q 2 ... k q s k q j .
q1
q 2
q s
j 1 q j
Вычислим возможную работу
N
N
s r
заданных сил и сил инерции: A ( F ) r ( F ) k q .
k
k
k
k
k
j
k 1
k 1
j 1 q j
s
Перегруппируем суммы
s
N
N
s
N
r
r
r
A q j (Q j Q j ) 0.
A q j ( Fk k ) k или A q j ( Fk k k k ).
произведений:
q j k 1
q j
q j
j 1
j 1
k 1
j 1
k 1
rk
Приращения обобщенных координат произвольны и независимы друг от друга.
Поэтому в полученном уравнении все коэффициенты при них
(обобщенные силы) должны быть равны нулю:
Q j Q j 0, ( j 1,2,...s).
QjФ
Qj
- уравнения движения системы, эквивалентные
общему уравнению динамики.
Ф
2. В обобщенные силы инерции Qj входят массы и ускорения точек системы. Попытаемся выразить эти силы через скорости точек и в конечном
N
N
N
итоге через кинетическую энергию:
rk
rk
dv k rk
Q j k
k 1
Добавим к этому выражению два
одинаковых слагаемых разного знака
и следующего вида:
Вычислим частную производную кинетической
координате:
энергии системы по обобщенной
Таким образом: Q d T T .
q j
N
mk
k 1
mk a k
k 1
drk v k
.
dt q j
q j
mk
k 1
dt
N
Q j mk
k 1
N
v v 1 N q vk
v
v
T
Nj
mj k (
vk vk k ) mk vk k
mk kdt k q j
q j q j k 1
2 2 k 1
q j
q j
d qTj k 1T
Подставим
в
уравнение
движения:
Q
0
.
jN
Производная по обобщенной скорости
T
q v kj q j
mdt
имеет аналогичное выражение:
k v
k
q
q
k
1
j
j
d T T
Q j ( j 1,2,..., s). - уравнения Лагранжа II рода.
Отсюда: производную
Вычислим
dt q j по
q j времени от частной производной кинетической энергии
системы по обобщенной скорости:
T d N
v
v П N
dv Tv N T
d П
Для dконсервативных
Q
mjk v k k . mk k k mk vk (k j 1,2,..., s).
k 1
(потенциальных)
dt q j dtсил:
q qj j k 1 dtdt q q j j k 1q j
dt q j q j
q j
.
N
N
dv k rk
dr v
dr v
mk k k mk k k .
dt q j k 1
dt q j k 1
dt q j
v k
q k
vk
T
q j
d T
dt q j
v k drk
q j dt
vk
d rk
dt q j
v k
q k
21
8.
Лекция 15 (продолжение – 15.2)■
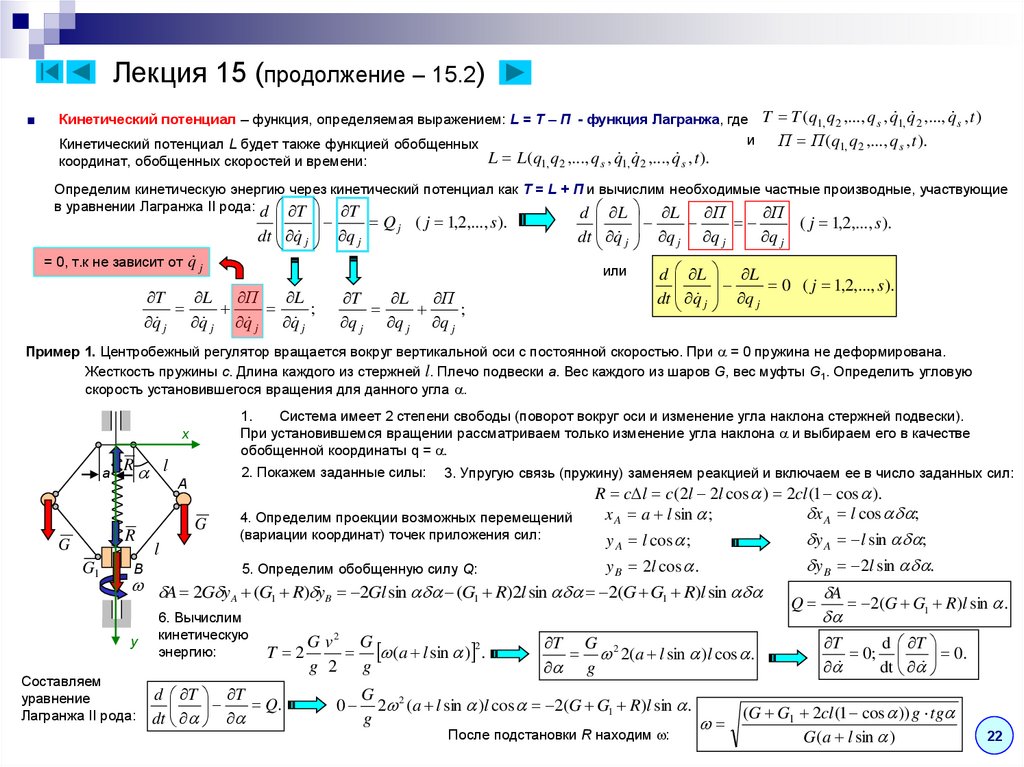
Кинетический потенциал – функция, определяемая выражением: L = T – П - функция Лагранжа, где T T (q1, q 2 ,..., q s , q 1, q 2 ,..., q s , t )
и
П П (q1, q 2 ,..., q s , t ).
Кинетический потенциал L будет также функцией обобщенных
L
L
(
q
q
,...,
q
,
q
q
,...,
q
,
t
).
координат, обобщенных скоростей и времени:
1, 2
s 1, 2
s
Определим кинетическую энергию через кинетический потенциал как T = L + П и вычислим необходимые частные производные, участвующие
в уравнении Лагранжа II рода: d T T
d L L П
П
dt q j
Q j ( j 1,2,..., s).
q j
dt q j
= 0, т.к не зависит от q j
или
T
L П
L
;
q j q j q j q j
T
L П
;
q j q j q j
( j 1,2,..., s).
q j q j
q j
d L
dt q j
L
0 ( j 1,2,..., s).
q j
Пример 1. Центробежный регулятор вращается вокруг вертикальной оси с постоянной скоростью. При = 0 пружина не деформирована.
Жесткость пружины c. Длина каждого из стержней l. Плечо подвески a. Вес каждого из шаров G, вес муфты G1. Определить угловую
скорость установившегося вращения для данного угла .
1.
Система имеет 2 степени свободы (поворот вокруг оси и изменение угла наклона стержней подвески).
При установившемся вращении рассматриваем только изменение угла наклона и выбираем его в качестве
обобщенной координаты q = .
x
a
R l
R
G
G1
2. Покажем заданные силы:
A
G
l
3. Упругую связь (пружину) заменяем реакцией и включаем ее в число заданных сил:
4. Определим проекции возможных перемещений
(вариации координат) точек приложения сил:
R c l c(2l 2l cos ) 2cl (1 cos ).
x A l cos ;
x A a l sin ;
y A l cos ;
y B 2l cos .
B
5. Определим обобщенную силу Q:
A 2G y (G R) y 2Gl sin (G R)2l sin 2(G G R)l sin
A
1
B
1
1
y
Составляем
уравнение
Лагранжа II рода:
6. Вычислим
кинетическую
энергию:
T 2
d T T
Q.
dt
G v2 G
2
(a l sin ) .
g 2 g
0
T G 2
2(a l sin )l cos .
g
G 2
2 (a l sin )l cos 2(G G1 R)l sin .
g
После подстановки R находим :
y A l sin ;
y B 2l sin .
A
Q
2(G G1 R)l sin .
T
d T
0;
0.
dt
(G G1 2cl (1 cos )) g tg
G (a l sin )
22
9.
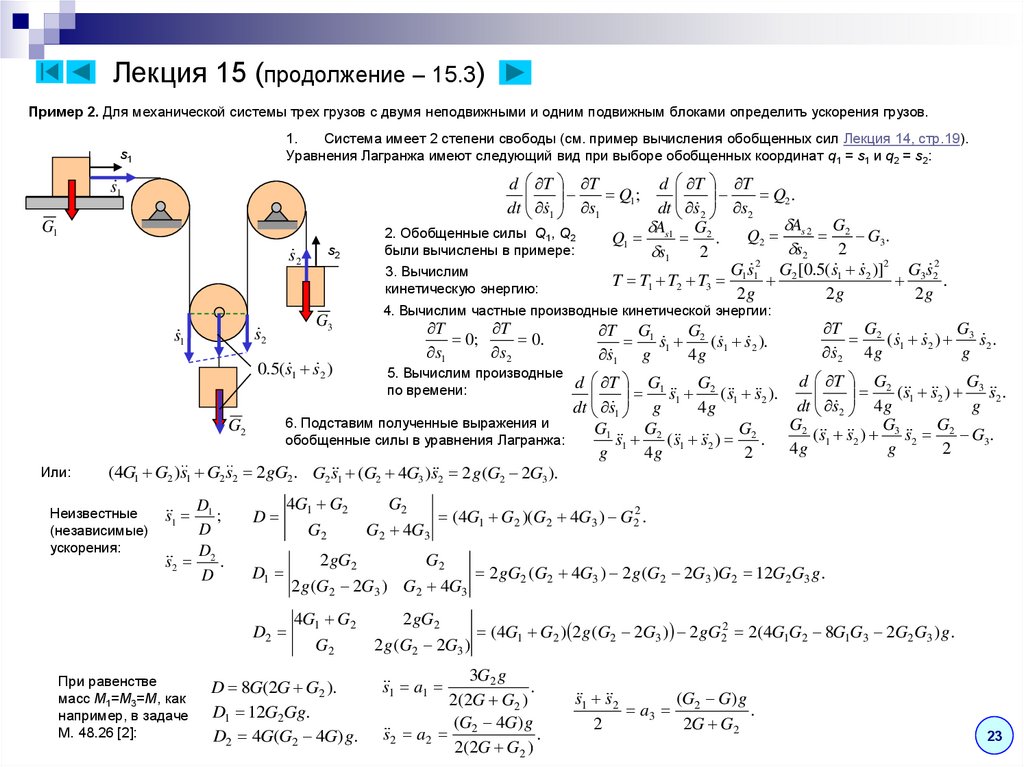
Лекция 15 (продолжение – 15.3)Пример 2. Для механической системы трех грузов с двумя неподвижными и одним подвижным блоками определить ускорения грузов.
1.
Система имеет 2 степени свободы (см. пример вычисления обобщенных сил Лекция 14, стр.19).
Уравнения Лагранжа имеют следующий вид при выборе обобщенных координат q1 = s1 и q2 = s2:
s1
s 1
G1
s2
s 2
G3
s 2
s 1
0.5(s 1 s 2 )
Или:
d T T
d T T
Q1;
Q2 .
dt s 1 s1
dt s 2 s2
A
G
A
G
2. Обобщенные силы Q1, Q2
Q2 s 2 2 G3 .
Q1 s1 2 .
s2
2
были вычислены в примере:
s1
2
2
G1s 1 G2 [0.5(s 1 s 2 )]2 G3 s 22
3. Вычислим
T
T
T
T
.
1
2
3
кинетическую энергию:
2g
2g
2g
4. Вычислим частные производные кинетической энергии:
T
T
0;
0.
s1
s2
5. Вычислим производные
по времени:
T G1
G
s 1 2 ( s 1 s 2 ).
s 1 g
4g
G
T G2
( s 1 s 2 ) 3 s 2 .
s 2 4 g
g
G
d T G2
d T G1
G
( s 1 s 2 ) 3 s 2 .
s 1 2 ( s 1 s 2 ).
dt s 2 4 g
g
dt s 1 g
4g
6. Подставим полученные выражения и
G
G
G
G2
2
G1
G
G
( s 1 s 2 ) 3 s 2 2 G3 .
s 1 2 ( s 1 s 2 ) 2 .
обобщенные силы в уравнения Лагранжа:
4
g
g
2
g
4g
2
(4G1 G2 ) s 1 G2 s 2 2gG2 . G2 s 1 (G2 4G3 ) s 2 2 g (G2 2G3 ).
Неизвестные
(независимые)
ускорения:
D1
;
D
D
s 2 2 .
D
s 1
D
4G1 G2
G2
G2
G2 4G3
D1
D2
При равенстве
масс M1=M3=M, как
например, в задаче
М. 48.26 [2]:
2 gG2
(4G1 G2 )(G2 4G3 ) G22 .
G2
2 g (G2 2G3 ) G2 4G3
4G1 G2
2 gG2
G2
2 g (G2 2G3 )
D 8G(2G G2 ).
D1 12G2Gg.
D2 4G(G2 4G) g.
2 gG2 (G2 4G3 ) 2 g (G2 2G3 )G2 12G2 G3 g.
(4G1 G2 ) 2 g (G2 2G3 ) 2 gG22 2(4G1G2 8G1G3 2G2 G3 ) g.
3G2 g
.
2(2G G2 )
(G 4G) g
s 2 a2 2
.
2(2G G2 )
s 1 a1
s 1 s 2
(G G) g
a3 2
.
2
2G G2
23
10.
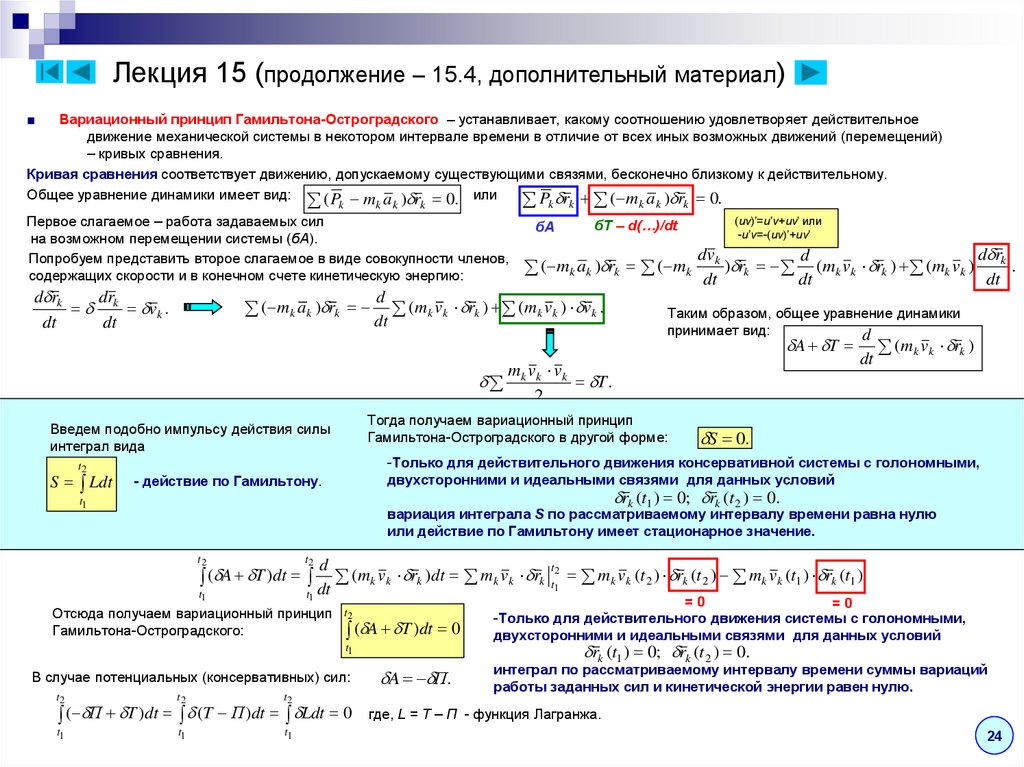
Лекция 15 (продолжение – 15.4, дополнительный материал)■
Вариационный принцип Гамильтона-Остроградского – устанавливает, какому соотношению удовлетворяет действительное
движение механической системы в некотором интервале времени в отличие от всех иных возможных движений (перемещений)
– кривых сравнения.
Кривая сравнения соответствует движению, допускаемому существующими связями, бесконечно близкому к действительному.
Общее уравнение динамики имеет вид: ( P m a ) r 0. или
P r ( m a ) r 0.
k
k
k
k
k
Первое слагаемое – работа задаваемых сил
на возможном перемещении системы (бA).
Попробуем представить второе слагаемое в виде совокупности членов,
содержащих скорости и в конечном счете кинетическую энергию:
d rk
dr
k vk .
dt
dt
( mk a k ) rk
бA
k
k
k
k
бT – d(…)/dt
( mk ak ) rk ( mk
d
(mk vk rk ) (mk vk ) vk .
dt
(uv)’=u’v+uv’ или
-u’v=-(uv)’+uv’
dvk
d rk
d
) rk (mk vk rk ) (mk vk )
.
dt
dt
dt
Таким образом, общее уравнение динамики
принимает вид:
d
A T
mk vk vk
T .
2
dt
(mk v k rk )
Потребуем, чтобы на границах интервала времени [t1,t2] действительная траектория совпадала с кривой сравнения: rk (t1 ) 0; rk (t 2 ) 0.
Тогда получаем вариационный принцип
Введем подобно импульсу действияДанное
силы требование эквивалентно отсутствию вариации перемещений в начале и в конце интервала [t ,t ],
Гамильтона-Остроградского в другой форме:
t=t2
1 2
S 0.
интеграл
вида
t=t1
например, при рассмотрении свободных колебаний можно задаться формой решения:
-Только для действительного движения консервативной системы с голономными,
t2
rk
x Aиsin
kt
x Asin kt двухсторонними
идеальными
связями для данных условий
по Гамильтону.
S Ldt - действие
rk интервала
(t1 ) 0; r[0,T/2],
0. T – период колебаний (2π/k).
Такая вариация координаты обращается в нуль на концах
где
k (t 2 )
вариация интеграла S по рассматриваемому интервалу времени равна нулю
Полученное общее уравнение динамики в дифференциальной
форме
справедливо
любой момент времени
рассматриваемого интервала.
или действие по
Гамильтону
имеетв стационарное
значение.
Умножим его на dt и проинтегрируем по всему интервалу:
t1
t2
t2
d
( A T )dt dt (mk vk rk )dt mk vk rk
t1
t1
Отсюда получаем вариационный принцип
Гамильтона-Остроградского:
t2
( A T )dt 0
t1
В случае потенциальных (консервативных) сил:
t2
t2
t2
t1
t1
t1
( П T )dt (T П )dt Ldt 0
A П.
t2
t1
mk v k (t 2 ) rk (t 2 ) mk v k (t1 ) rk (t1 ).
=0
=0
-Только для действительного движения системы с голономными,
двухсторонними и идеальными связями для данных условий
rk (t1 ) 0; rk (t 2 ) 0.
интеграл по рассматриваемому интервалу времени суммы вариаций
работы заданных сил и кинетической энергии равен нулю.
где, L = T – П - функция Лагранжа.
24
11.
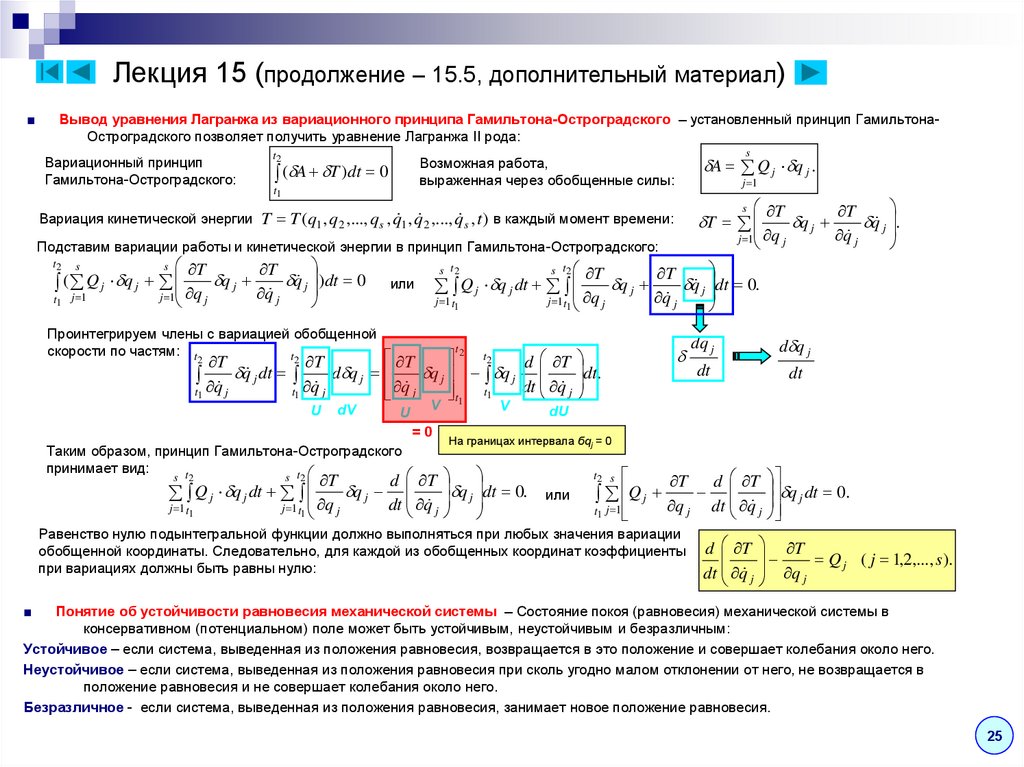
Лекция 15 (продолжение – 15.5, дополнительный материал)■
Вывод уравнения Лагранжа из вариационного принципа Гамильтона-Остроградского – установленный принцип ГамильтонаОстроградского позволяет получить уравнение Лагранжа II рода:
Вариационный принцип
Гамильтона-Остроградского:
Вариация кинетической энергии
t2
s
A Q j q j .
Возможная работа,
выраженная через обобщенные силы:
( A T )dt 0
t1
j 1
s
T T (q1 , q2 ,..., q s , q 1 , q 2 ,..., q s , t ) в каждый момент времени:
Подставим вариации работы и кинетической энергии в принцип Гамильтона-Остроградского:
s
s T
T
(
Q
q
q
q
j
j
j
j )dt 0
q
q
j 1
t1 j 1
j
j
t2
T
T
q j
q j dt 0.
q j
j 1 t1 q j
j 1 t1
t
U
V
=0
Таким образом, принцип Гамильтона-Остроградского
принимает вид:
t
t
s 2
s 2
T
d T
q j
dt q j
j 1 t1 q j
Q j q j dt
j 1 t1
Q j q j dt
T
2 t2
T
T
d T
q q j dt q d q j q q j q j dt q
t1
t1
j
t1 t1
j
j
j
dV
T
s t2
s t2
или
Проинтегрируем члены с вариацией обобщенной
скорости по частям: t2
t2
U
T
T
q j
q j .
q j
j 1 q j
V
dt.
dq j
d q j
dt
dt
dU
На границах интервала бqj = 0
q j dt 0.
t2 s
или
Q j
t1 j 1
T
d T
q j dt q j
Равенство нулю подынтегральной функции должно выполняться при любых значения вариации
обобщенной координаты. Следовательно, для каждой из обобщенных координат коэффициенты
при вариациях должны быть равны нулю:
d T
dt q j
q j dt 0.
T
Q j ( j 1,2,..., s).
q j
■
Понятие об устойчивости равновесия механической системы – Состояние покоя (равновесия) механической системы в
консервативном (потенциальном) поле может быть устойчивым, неустойчивым и безразличным:
Устойчивое – если система, выведенная из положения равновесия, возвращается в это положение и совершает колебания около него.
Неустойчивое – если система, выведенная из положения равновесия при сколь угодно малом отклонении от него, не возвращается в
положение равновесия и не совершает колебания около него.
Безразличное - если система, выведенная из положения равновесия, занимает новое положение равновесия.
25
12.
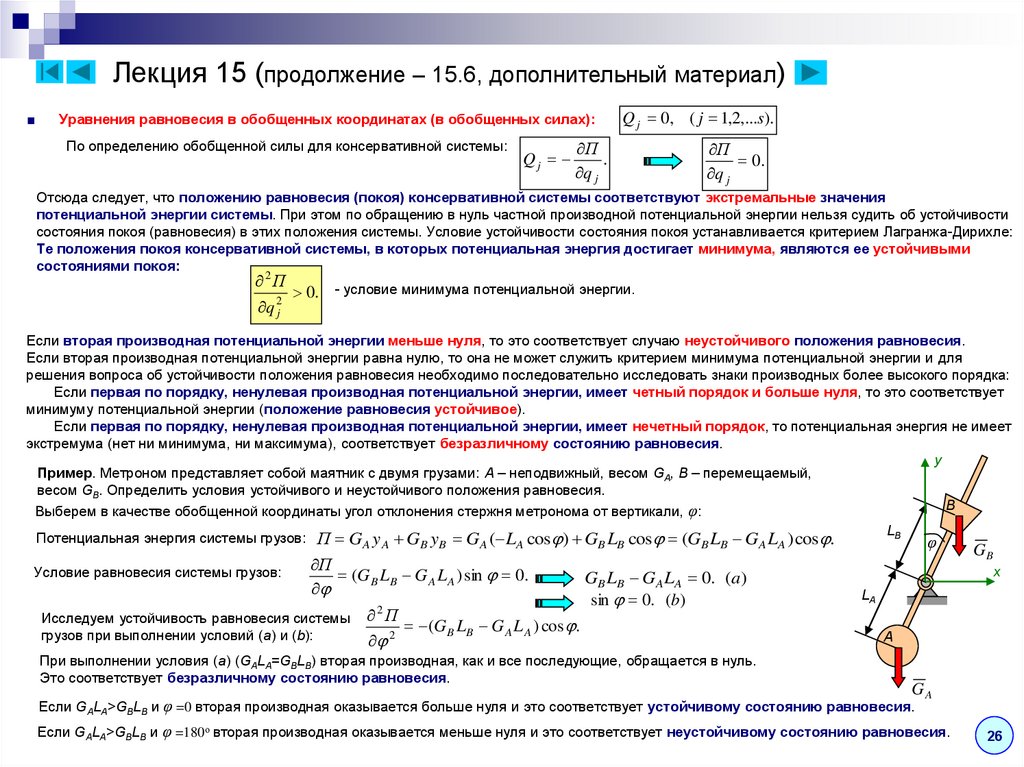
Лекция 15 (продолжение – 15.6, дополнительный материал)■
Уравнения равновесия в обобщенных координатах (в обобщенных силах):
По определению обобщенной силы для консервативной системы:
Qj
Q j 0, ( j 1,2,...s).
П
.
q j
П
0.
q j
Отсюда следует, что положению равновесия (покоя) консервативной системы соответствуют экстремальные значения
потенциальной энергии системы. При этом по обращению в нуль частной производной потенциальной энергии нельзя судить об устойчивости
состояния покоя (равновесия) в этих положения системы. Условие устойчивости состояния покоя устанавливается критерием Лагранжа-Дирихле:
Те положения покоя консервативной системы, в которых потенциальная энергия достигает минимума, являются ее устойчивыми
состояниями покоя:
2П
0. - условие минимума потенциальной энергии.
2
q j
Если вторая производная потенциальной энергии меньше нуля, то это соответствует случаю неустойчивого положения равновесия.
Если вторая производная потенциальной энергии равна нулю, то она не может служить критерием минимума потенциальной энергии и для
решения вопроса об устойчивости положения равновесия необходимо последовательно исследовать знаки производных более высокого порядка:
Если первая по порядку, ненулевая производная потенциальной энергии, имеет четный порядок и больше нуля, то это соответствует
минимуму потенциальной энергии (положение равновесия устойчивое).
Если первая по порядку, ненулевая производная потенциальной энергии, имеет нечетный порядок, то потенциальная энергия не имеет
экстремума (нет ни минимума, ни максимума), соответствует безразличному состоянию равновесия.
y
Пример. Метроном представляет собой маятник с двумя грузами: A – неподвижный, весом GA, B – перемещаемый,
весом GB. Определить условия устойчивого и неустойчивого положения равновесия.
B
Выберем в качестве обобщенной координаты угол отклонения стержня метронома от вертикали, φ:
П GA y A GB y B GA ( LA cos ) GB LB cos (GB LB GA LA ) cos .
П
Условие равновесия системы грузов:
(GB LB G A L A ) sin 0.
GB LB GA LA 0. (a)
sin 0. (b)
2
Исследуем устойчивость равновесия системы П
(G B LB G A L A ) cos .
грузов при выполнении условий (a) и (b):
2
LB
Потенциальная энергия системы грузов:
При выполнении условия (a) (GALA=GBLB) вторая производная, как и все последующие, обращается в нуль.
Это соответствует безразличному состоянию равновесия.
φ
GB
x
LA
A
GA
Если GALA>GBLB и φ =0 вторая производная оказывается больше нуля и это соответствует устойчивому состоянию равновесия.
Если GALA>GBLB и φ =180о вторая производная оказывается меньше нуля и это соответствует неустойчивому состоянию равновесия.
26