


")
")
")

")














 physics
physicsSimilar presentations:
")



")
")
")


")
Курс лекций по теоретической механике
1. Курс лекций по теоретической механике
Московский государственный университет путей сообщения (МИИТ)Кафедра теоретической механики
Научно-технический центр транспортных технологий
Бондаренко А.Н.
Курс лекций по
теоретической
механике
Динамика (II часть)
Электронный учебный курс написан на основе лекций, читавшихся автором для студентов,
обучавшихся по специальностям СЖД, ПГС и СДМ в НИИЖТе и МИИТе (1974-2006 гг.). Учебный
материал соответствует календарным планам в объеме трех семестров.
Для полной реализации анимационных эффектов при презентации необходимо использовать средство просмотра
Power Point не ниже, чем встроенный в Microsoft Office операционной системы Windows-ХР Professional.
Запуск презентации – F5, навигация – Enter, навигационные клавиши, щелчок мыши, кнопки.
Завершение – Esc.
Замечания и предложения можно послать по e-mail: bond@miit.ru .
Москва - 2007
2. Содержание
Лекция 9. Работа, мощность силы. Кинетическая энергия. Теоремы об изменении кинетической энергиидля материальной точки и системы. Пример решения задач на использование теоремы об изменении
кинетической энергии материальной точки.
Лекция 10. Пример решения задач на использование теоремы об изменении кинетической энергии
системы. Потенциальное силовое поле. Силовая функция. Потенциальная энергия системы. Закон
сохранения механической энергии.
Лекция 11. Динамика поступательного и вращательного движения твердого тела. Физический маятник.
Динамика плоского движения твердого тела. Принцип Даламбера для материальной точки и
механической системы. Приведение сил инерции точек при поступательном и вращательном
движениях. твердого тела.
Лекция 12. Пример приведения сил инерции при вращательном движении тела. Приведение сил
инерции точек при плоском движении твердого тела. Определение динамических реакций подшипников
при вращении твердого тела. Балансировка.
Лекция 13. Аналитическая механика. Обобщенные координаты. Уравнения связей. Возможные
перемещения. Идеальные связи. Принцип возможных перемещений. Примеры использования принципа
возможных перемещений при определении реакций связей.
Лекция 14. Общее уравнение динамики. Пример решения задачи на применение общего уравнения
динамики. Обобщенные силы.
Лекция 15. Уравнение Лагранжа II рода. Кинетический потенциал. Пример решения задачи на
применение уравнения Лагранжа II рода. Вариационный принцип Гамильтона-Остроградского. Понятие
об устойчивости состояния равновесия системы в потенциальном поле.
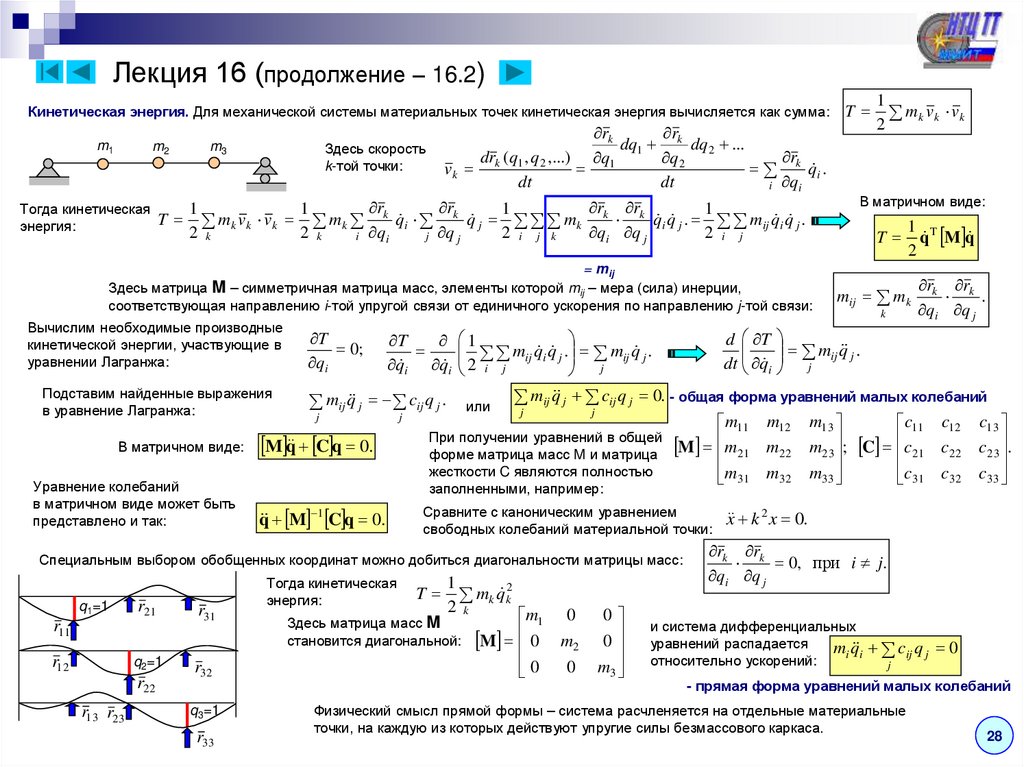
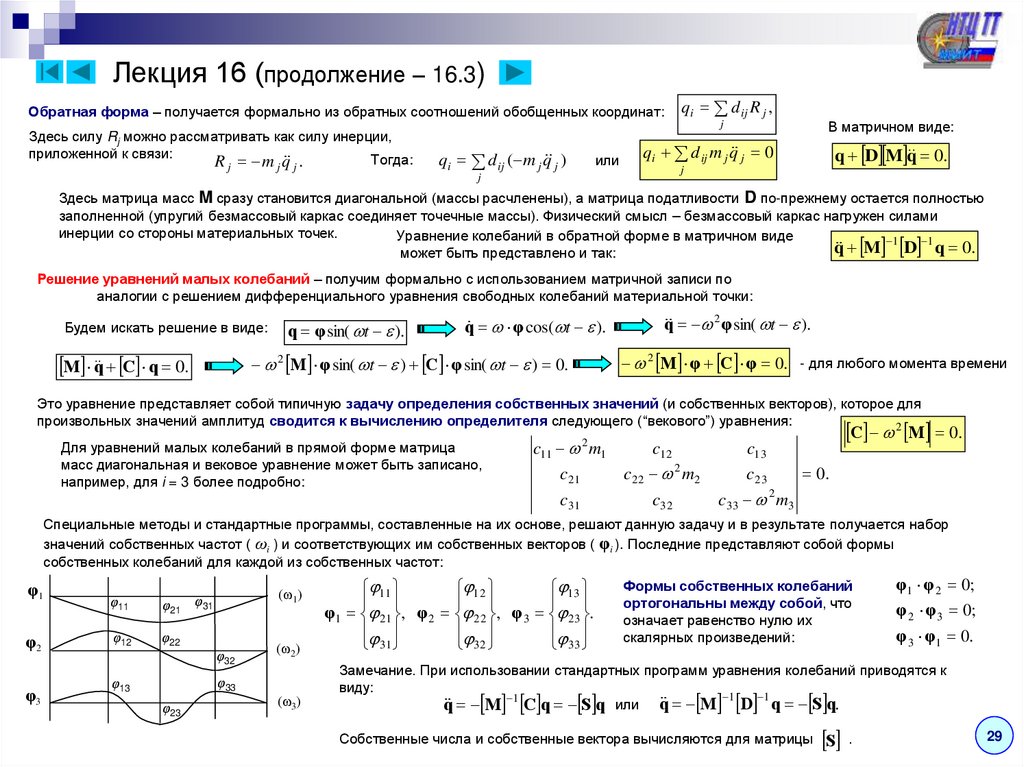
Лекция 16. Малые колебания систем с несколькими степенями свободы. Общая форма
дифференциальных уравнений колебаний. Прямая форма. Обратная форма. Главные координаты.
Свободные колебания с учетом сопротивления среды.
Лекция 17. Элементарная теория удара. Общие теоремы теории удара. Удар тела о неподвижную
преграду. Случай косого удара. Гидравлический удар в трубах. Прямой центральный удар двух тел.
Рекомендуемая литература
1. Яблонский А.А. Курс теоретической механики. Ч.2. М.: Высшая школа. 1977 г. 368 с.
2. Мещерский И.В. Сборник задач по теоретической механике. М.: Наука. 1986 г. 416 с.
3. Сборник заданий для курсовых работ /Под ред. А.А. Яблонского. М.:Высшая школа. 1985 г. 366 с.
4. Бондаренко А.Н. “Теоретическая механика в примерах и задачах. Динамика” (электронное пособие
www.miit.ru/institut/ipss/faculties/trm/main.htm ), 2004 г.
3. Лекция 9
Работа, мощность силы. Кинетическая и потенциальная энергия – механическое движение в результате взаимодействиямеханических систем может переноситься с одной механической системы на другую:
1.
без превращений в другую форму движения, т.е. в качестве того же механического движения,
2.
с превращением в другую форму движения материи (потенциальную энергию, теплоту, электрическую энергию и т.д.)
Каждый из этих случаев имеет свои измерители (меры) механического движения и механического взаимодействия, отстаиваемые в свое
время Декартом и Лейбницем (см. таблицу):
Ф. Энгельс показал существование и равноправность
обоих (векторных и скалярных) мер движения, каждой
Мера механического движения
Мера механического
из которых соответствуют свои меры механического
взаимодействия
взаимодействия.
Декарт
Количество движения Q mv
Импульс силы S F dt
Импульс силы является мерой действия силы при
изменении механического движения.
Работа является количественной мерой превращения
mv 2 Работа силы
Лейбниц
Кинетическая энергия
A F ds
T
механического движения в какую-либо другую форму
2
движения материи.
Работа силы, приложенной к материальной точке – Пусть точка приложения переменной по величине и направлению силы
перемещается по некоторой произвольной траектории. На малом (элементарном) перемещении силу можно считать постоянной и
элементарная работа силы равна проекции силы на направление перемещения (касательную к траектории движения),
умноженной на элементарное перемещение :
Знак элементарной работы определяется
бA F ds F cos ds
бA 0;
0 s
величиной угла и знаком cos :
2
ds
M
F
v
T
Поскольку часто более удобно работать с острыми углами, то в этом случае
2
используют острый угол и знак присваивают по следующему простому
правилу: если сила и перемещение совпадают по направлению,
то присваивается знак +, если противоположны по направлению, то знак .
Элементарная работа может быть записана в виде скалярного произведения: бA F dr
Работа на конечном перемещении M M1 получается
суммированием или интегрированием:
A бA
M1
A F dr
M
M
Частные случаи: 1. Сила постоянная по величине (F = const)
и направлению ( =const):
2. Сила постоянная по величине (F = const)
и параллельна перемещению ( =0):
и в проекциях: бA Fx dx Fy dy Fz dz.
M1
M1
A F ds
бA 0.
A Fx dx Fy dy Fz dz.
M
M1
M1
M
M
A F cos ds F cos ds Fs cos .
A Fs.
3. Сила перпендикулярна перемещению:
A 0
1
4. Лекция 9 (продолжение – 9.2)
Можно доказать следующие теоремы и утверждения:Работа равнодействующей на некотором перемещении равна алгебраической сумме работ составляющих сил на
M1
M1
M1
M1
том же перемещении:
A Ai
A R dr ( F1 F2 ...) dr F1 dr F2 dr ... A1 A1 ... Ai
M
M
M
M
■
Работа постоянной сил по величине и направлению на составном перемещении равна алгебраической сумме работ этой силы
на каждом из составляющих перемещений:
A Asi
A F s F ( s1 s 2 ...) F s1 F s 2 ... As1 As 2 ... Asi
Ai 0
M1
M1
A ( R R ) dr ( R R ) dr 0;
■
Работа внутренних сил неизменяемой системы равна нулю:
■
Работа силы тяжести не зависит от вида траектории и равна произведению силы тяжести на разность высот:
i
'
M
M1
M1
M
M
M
( R ' R ).
A G( z1 z)
A Gx dx G y dy Gz dz ( G )dz Gz z1 G ( z1 z ); (Gx G y 0, Gz -G)
■
Работа линейной силы упругости (реакции пружины)
при перемещении из состояния равновесия:
z
A c
Δx
.
2
2
M1
M1
x1
x2
x12
A Rx dx ( cx)dx c
c ; ( Rx cx)
2 x 0
2
M
M
Работа силы, приложенной к твердому телу, вращающемуся вокруг неподвижной оси. Запишем выражение для
элементарной работы силы, приложенной к точке, и выразим элементарное перемещение через угол поворота тела:
z
бA F ds F cos ds F cos R d
бA Fh d M z ( F )d .
ω
R
h
F
d
ds
R
F
-работа силы, приложенной
к вращающемуся твердому
телу, выражается через
момент силы относительно
оси.
h
Работа силы, приложенной к вращающемуся твердому телу,
для конечного угла поворота:
A M z ( F )d .
В частном случае постоянного значения момента силы относительно оси
работа равна произведению момента силы на угол поворота:
A M z ( F )( 1 ).
1
Мощность – величина, характеризуемая количеством работы, произведенной в единицу времени:
T
A
F ds
N
F v F v .
dt
dt
Мощность силы, приложенной к точке:
Мощность силы, приложенной к вращающемуся твердому телу:
N
A
dt
M z d
M z z M .
dt
N
A
dt
.
2
5. Лекция 9 (продолжение – 9.3)
Кинетическая энергия – характеризует способность механического движения превращаться в эквивалентное количество другогодвижения:
■
Кинетическая энергия
материальной точки:
mv2
T
2
■
Кинетическая энергия
системы материальных точек:
■
Кинетическая энергия твердого тела
при поступательном движении:
MvC2
T
2
■
Кинетическая энергия твердого тела
при вращательном движении:
I 2
T z z
2
■
Кинетическая энергия
твердого тела при плоском
движении:
T
MvC2 I zC z2
2
2
T
mk vk2
2
mk vk2 v 2
MvC2
v2
T
mk M
;
2
2
2
2
(v1 v2 ... v vC )
mk vk2
mk ( z hk ) 2 z2
I z z2
2
T
mk hk 2 ;
2
2
2
( I z mk hk2 )
mk vk vk
m (v v ) (vC vkC ) MvC2
m v2
k C kC
vC mk vkC k kC .
2
2
2
2
2
dr
d
I zC z
vC mk kC vC ( mk rkC ) 0; ( mk rkC 0)
dt
dt
2
T
Теорема об изменении кинетической энергии материальной точки – Изменение кинетической энергии точки равно работе
сил, действующих на точку на том же перемещении:
Проинтегрируем полученное соотношение:
Запишем основной закон динамики точки:
ma F R
v
i
Выразим ускорение через скорость и умножим
dv
dr R dr
левую и правую части соотношения скалярно m
dt
на дифференциал радиуса-вектора :
или mv dv R dr .
После подстановки пределов получаем:
mv2
v v
md
d
2
2
mv2 M
mv2
d
dA
;
A
2 M
2
v0
0
dA
mv 2 mv02
A
2
2
Теорема об изменении кинетической энергии системы – Изменение кинетической энергии системы равно работе сил,
действующих на систему на соответствующих перемещениях точек системы:
Запишем теорему об изменении кинетической энергии для произвольной точки системы,
при этом выделим работу внешних и внутренних сил, приложенных к данной точке:
mk vk2 mvk20
Aki Ake .
2
2
mk vk2
mvk20
Aki Ake .
Просуммируем левые и правые части соотношений:
2
2
Для неизменяемой системы:
В левой части получили разность кинетических энергий системы:
T T0 Aki Ake .
T T0 Ake ;
A 0
i
k
3
6. Лекция 9 (продолжение – 9.4)
Пример решения задачи на применение теоремы об изменении кинетической энергии для материальной точки – Снарядмассы m выбрасывается пружинным устройством из канала под углом к горизонту. Длина нерастянутой пружины жесткостью c
равна длине канала l0. Перед выстрелом пружина сжимается на величину d. Определить скорость снаряда при вылете из канала,
а также максимальную высоту полета.
Дано: , c, d, m, l0
Начальная скорость снаряда равна нулю: v0 0.
Найти: v1, H
Работа сил, приложенных к объекту, равна:
v2
1. Выбираем объект - снаряд
A AN AG AR .
v1
d
2.
Отбрасываем связи – ствол, пружину
Работа нормальной реакции равна нулю (направление
N
реакции перпендикулярно перемещению): AN 0.
R
3. Заменяем связи реакциями – N, R
G H
4. Добавляем активные силы – G
Работа силы тяжести:
AG G h mgd sin .
Работа упругой реакции пружины
d2
(направление реакции совпадает
AR c .
с перемещением):
2
2
2
mv
d
Подставляем определенные
1
0 mgd sin c ,
величины в теорему:
2
2
5. Записываем теорему об изменении
кинетической энергии для точки:
G
Определяем максимальную высоту полета
(повторяем шаги 1-5):
2
2
mv2 mv1
A
2
2
mv12 mv02
A
2
2
Отсюда величина скорости вылета снаряда:
Вертикальная скорость снаряда в наивысшей точке траектории равна нулю : v2 y 0.
v1
cd 2
2 gd sin .
m
Горизонтальная скорость снаряда постоянная (из закона
сохранения проекции на ось x количества движения точки)
и равна:
2
AG G h mg ( H l0 sin ).
cd 2
cd 2
Подставляем определенные
m
2 gd sin cos 2 m
2 gd sin
m
величины в теорему:
m
mg ( H l sin ).
0
2
2
После некоторых сокращений и
Отсюда максимальная
cd 2
(
gd sin ) sin 2 g ( H l0 sin ).
преобразований:
высота полета:
2m
Работа силы тяжести:
v2 x v1x
H (
cd
2 gd sin cos .
m
cd 2
d sin ) sin 2 l0 sin .
2mg
Заметим, что предыдущее выражение можно более быстро получить,
записывая теорему об изменении кинетической энергии только для
вертикальной скорости движения точки, поскольку горизонтальные силы
отсутствуют и горизонтальная скорость не изменяется..
4
7. Лекция 10
Пример решения задачи на применение теоремы об изменении кинетической энергии для системы – Массивный бумажныйрулон радиуса R, приведенный в движение толчком, катится без проскальзывания по инерции вверх по наклонной шероховатой
плоскости под углом к горизонту с некоторой начальной скоростью. Коэффициент трения качения fk. Определить начальную скорость
рулона, необходимую для того, чтобы он мог перевалить через вершину высотой H от начального положения.
Дано: , fk, H, R
Найти: v0
s
Кинетическая энергия на вершине
1. Выбираем объект - рулон
равна нулю:
T 0.
N
2.
Отбрасываем
связи
–
опорную
плоскость
v
Кинетическая энергия
MvC2 0 I zC z20
в начальный момент времени T0
3. Заменяем связи реакциями – N, Fтр, Mк
H
2
2
равна:
Mк
4. Добавляем активные силы – G
Fтр
MR 2
Момент инерции массы сплошного
G
I
5. Записываем теорему об изменении
zC
цилиндра равен:
2
кинетической энергии для твердого тела:
vC 0
Угловая
скорость
равна:
z
0
e
Подставляем определенные
величины в теорему:
3MvC2 0
H
MgH f к Mg cos
,
4
R sin
После некоторых сокращений и
преобразований получаем:
vC 0
4
ctg
gH (1 f к
).
3
R
T T0 A
Тогда кинетическая энергия
в начальный момент времени:
R 2
MvC2 0 1 MR 2 vC 0
3MvC2 0
T0
.
2
2 2 R
4
Ae AN AFтр AG AMк .
Работа нормальной реакции равна нулю:
AN 0.
Работа силы трения скольжения равна нулю (приложена в МЦС): AFтр 0.
Работа сил, приложенных к объекту, равна:
AG G h MgH .
Работа момента сопротивления качению: AMк M к ( 0 ).
M к f к N f кG cos f к Mg cos .
Момент сопротивления качению:
s
H
Разность углов поворота рулона:
0
.
R R sin
Работа силы тяжести:
Заметим, что выражение для начальной
скорости не зависит от массы рулона.
Масса рулона, как мера инертности, будет
влиять на величину усилия, которое должно быть приложено к телу, чтобы сообщить ему указанную начальную скорость.
Потенциальное силовое поле
Силовое поле – пространство, в каждой точке которого на материальную точку действуют силы, зависящие от координат точки.
Стационарное силовое поле – действующие силы которого не зависят от времени, F = F(x, y,z) (поле силы тяжести, поле силы
упругости).
Нестационарное силовое поле - действующие силы которого зависят от времени, F = F(x, y,z, t) (электромагнитное поле).
5
8.
Лекция 10 (продолжение – 10.2)■
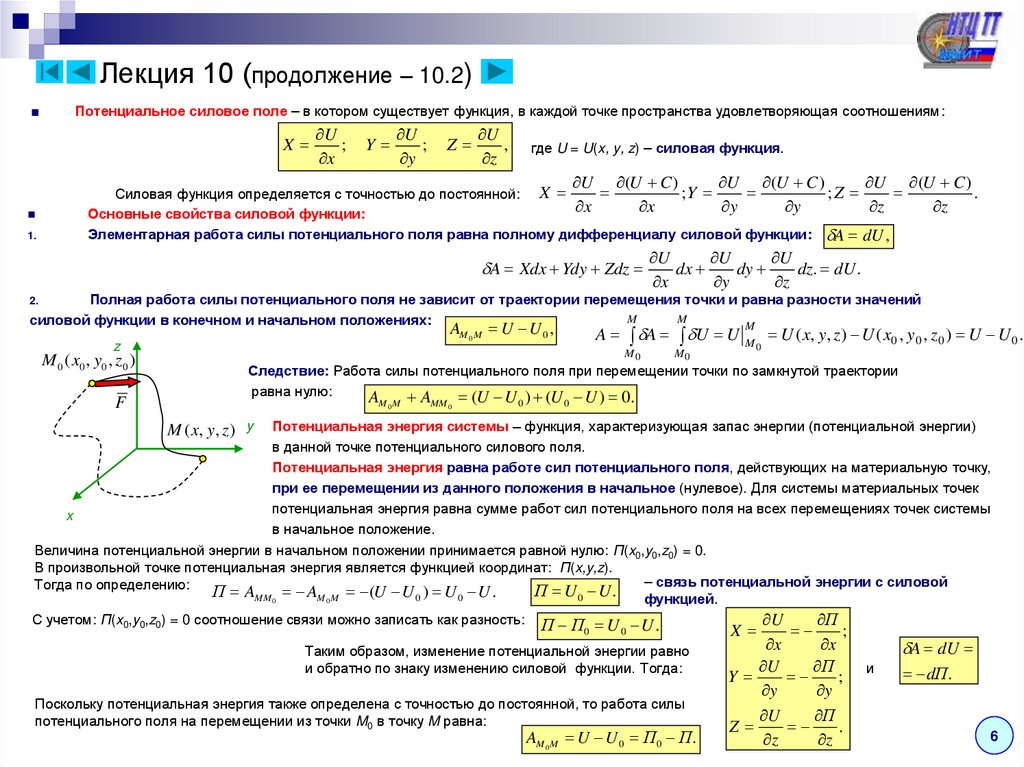
Потенциальное силовое поле – в котором существует функция, в каждой точке пространства удовлетворяющая соотношениям:
X
U
;
x
Y
U
;
y
Z
U
,
z
где U = U(x, y, z) – силовая функция.
U
1.
(U C )
U
(U C )
;Y
Силовая функция определяется с точностью до постоянной: X
x
x
y
y
Основные свойства силовой функции:
Элементарная работа силы потенциального поля равна полному дифференциалу силовой функции:
A Xdx Ydy Zdz
;Z
U (U C )
.
z
z
A dU ,
U
U
U
dx
dy
dz. dU .
x
y
z
Полная работа силы потенциального поля не зависит от траектории перемещения точки и равна разности значений
M
M
силовой функции в конечном и начальном положениях:
M
2.
AM 0 M U U 0 ,
z
M 0 ( x0 , y0 , z0 )
F
A A U U M U ( x, y, z ) U ( x0 , y0 , z 0 ) U U 0 .
M0
M0
0
Следствие: Работа силы потенциального поля при перемещении точки по замкнутой траектории
равна нулю:
A
A
(U U ) (U U ) 0.
M 0M
MM 0
0
0
Потенциальная энергия системы – функция, характеризующая запас энергии (потенциальной энергии)
в данной точке потенциального силового поля.
Потенциальная энергия равна работе сил потенциального поля, действующих на материальную точку,
при ее перемещении из данного положения в начальное (нулевое). Для системы материальных точек
потенциальная энергия равна сумме работ сил потенциального поля на всех перемещениях точек системы
x
в начальное положение.
Величина потенциальной энергии в начальном положении принимается равной нулю: П(x0,y0,z0) = 0.
В произвольной точке потенциальная энергия является функцией координат: П(x,y,z).
– связь потенциальной энергии с силовой
Тогда по определению:
П U0 U.
П AMM 0 AM 0 M (U U 0 ) U 0 U .
функцией.
С учетом: П(x0,y0,z0) = 0 соотношение связи можно записать как разность: П П U U .
U
П
M ( x, y , z ) y
0
0
Таким образом, изменение потенциальной энергии равно
и обратно по знаку изменению силовой функции. Тогда:
Поскольку потенциальная энергия также определена с точностью до постоянной, то работа силы
потенциального поля на перемещении из точки M0 в точку M равна:
AM 0 M U U 0 П0 П .
X
;
x
x
U
П
Y
;
y
y
U
П
Z
.
z
z
A dU
и
dП.
6
9. Лекция 10 (продолжение 10.3)
Примеры потенциальных силовых полейПоле силы тяжести. Сила тяжести, работа которой не зависит от траектории, является примером силы, имеющей потенциал –
геометрическое место точек пространства, в которых потенциальная энергия постоянна. Проекции силы тяжести на координатные
оси равны:
Последнее выражение есть дифференциальное уравнение, которое легко
z
П
M1 ( x1 , y1 , z1 )
X
0;
решается разделением переменных и интегрированием левой и правой
x
частей:
П dП
M ( x, y , z )
H
y
y
G
z
x
M ( x2 , y 2 , z 2 )
П
0;
y
П
Z
G.
z
Y
z
■
П Gz C.
G
AM1M 2 П1 П 2 (Gz1 C ) (Gz2 C ) G ( z1 z 2 ) GH .
Поле центральной силы притяжения. Силы тяжести могут считаться параллельными и постоянными по величине только в небольшой
области пространства в поле тяготения Земли и эквипотенциальные поверхности могут считаться плоскими только в пределах этой
области. В случае рассмотрения силы притяжения к центру величина силы прямо пропорциональна массе и обратно пропорциональна
квадрату расстояния между материальной точкой и центром тяготения O:
m
z
M ( x, y , z )
P
O
z
r
y
x
dz
Эквипотенциальные поверхности (П = const) представляют собой
горизонтальные плоскости. Сила тяжести направлена перпендикулярно
к этим плоскостям в сторону уменьшения значений потенциальной энергии.
Работа силы тяжести на перемещении из точки M1 в точку M2:
x
y
x
m x
Проекции силы
X P cos( P , x) k 2 ;
r r
притяжения
на координатные
m y
Y P cos( P , y ) k 2 ;
оси равны:
r r
m z
Z P cos( P , z ) k 2 .
r r
Полученное выражение есть дифференциальное уравнение,
которое легко решается интегрированием левой и правой частей:
P k
r2
Элементарная работа силы притяжения:
A Xdx Ydy Zdz k
m
( xdx ydy zdz ).
r3
d (r 2 ) d ( x 2 y 2 z 2 ), rdr xdx ydy zdz.
Дифференциал
потенциальной энергии:
dП k
mdr
r2
m
dП dU A k 3 rdr.
r
m
П k C.
r
Эквипотенциальные поверхности (П = const) поля центрального тяготения представляют собой сферические поверхности с центром
в точке O. Сила притяжения направлена по нормали к этим поверхностям в сторону уменьшения значений потенциальной энергии.
Закон сохранения механической энергии – При движении механической системы в стационарном потенциальном поле полная
механическая энергия системы остается постоянной.
По теореме об изменении кинетической энергии системы:
T2 T1 Ak П1 П 2 .
Отсюда:
T2 П2 T1 П1 const.
Сумму кинетической и потенциальной энергий называют полной механической энергией системы.
7
10. Лекция 11
Динамика поступательного и вращательного движений твердого тела – рассмотренные теоремы динамики системы даютдифференциальные уравнения, описывающие эти два типа движения твердого тела.
Дифференциальные уравнения поступательного движения твердого тела – из теоремы о движении центра масс системы:
M x C Rxe ;
M y C R ye ;
M z C Rze .
Дифференциальные уравнения вращательного движения твердого тела вокруг неподвижной оси – из теоремы об изменении
момента количества движения системы:
I M e .
z
z
z
Физический маятник – твердое тело, имеющее неподвижную горизонтальную ось вращения, не проходящую через его центр тяжести, и
находящийся под действием только силы тяжести. При отклонении физического маятника от положения равновесия возникает возвращающий
момент от силы тяжести, наличие которого является условием колебательного движения (качания) относительно положения равновесия.
1. Выбираем объект (маятник):
2. Отбрасываем связи (цилиндрические шарниры):
3. Заменяем связи реакциями (суммарные реакции двух шарниров):
z
YO
y
O
С
O1
x
z
y
O
XO
Подставим момент инерции
и представим уравнение в виде:
G
YO
l
x
O1
G
I x M xe Ga sin .
Ga
sin 0. - дифференциальное уравнение качаний
физического маятника.
Ix
I x M xe Gl sin , где I x ml 2 , G mg.
Рассмотрим математический маятник длиной l:
Представим уравнение в виде:
a l
XO
4. Запишем дифференциальное уравнение вращения оси x :
g
sin 0.
l
- дифференциальное уравнение качаний
математического маятника.
Поскольку полученные уравнения отличаются лишь коэффициентами, то всегда можно поставить
в соответствие физическому маятнику математический маятник, период качаний которого равен
периоду данного физического маятника. Для этого достаточно приравнять коэффициенты:
Отсюда можно определить приведенную длину физического маятника:
Последнее неравенство
легко доказывается:
l
Ix
I ma
I
xC
xC a.
ma
ma
ma
2
l
Ixg Ix
; l a.
Ga ma
Ga g
.
Ix
l
Точка O1 физического маятника, находящаяся на расстоянии l по прямой OC называется центром качаний маятника.
В случае малых колебаний sinφ φ:
Период
колебаний:
T
Ix
2
2
.
k
Ga
Ga
Ga
0 или k 2 0, где k
.
Ix
Ix
Используя формулу для периода колебаний можно определять опытным путем
моменты инерции тел сложной формы (положение центра тяжести можно найти
методом подвешивания).
8
11.
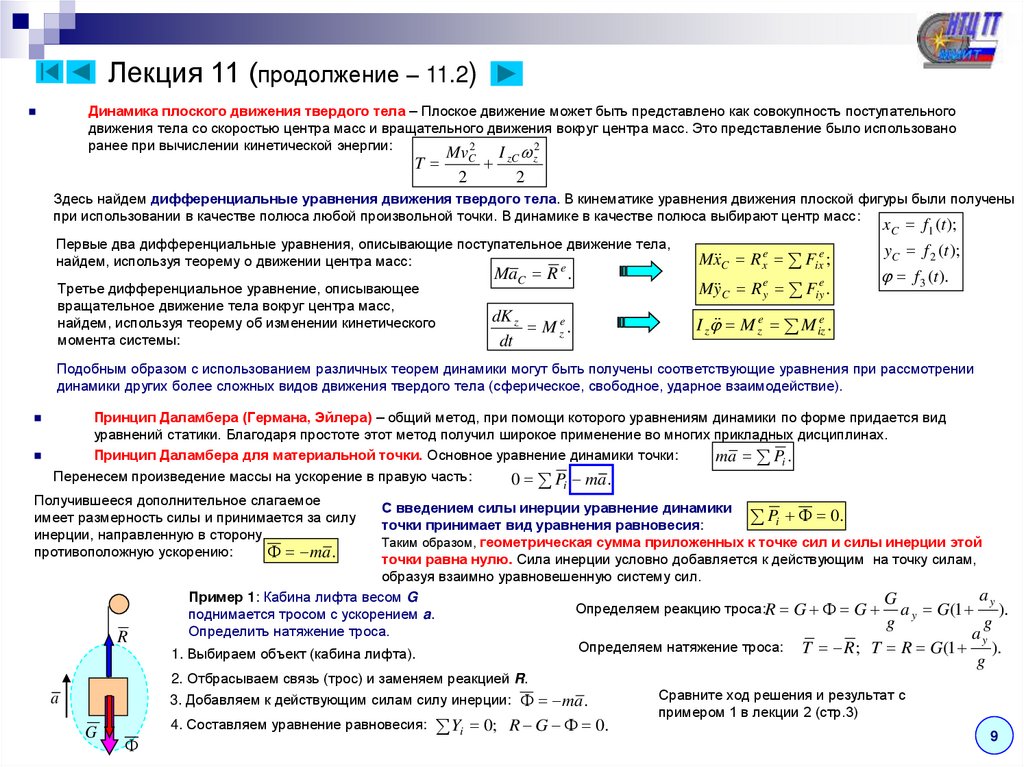
Лекция 11 (продолжение – 11.2)Динамика плоского движения твердого тела – Плоское движение может быть представлено как совокупность поступательного
движения тела со скоростью центра масс и вращательного движения вокруг центра масс. Это представление было использовано
ранее при вычислении кинетической энергии:
2
2
T
Mv C I zC z
2
2
Здесь найдем дифференциальные уравнения движения твердого тела. В кинематике уравнения движения плоской фигуры были получены
при использовании в качестве полюса любой произвольной точки. В динамике в качестве полюса выбирают центр масс:
Первые два дифференциальные уравнения, описывающие поступательное движение тела,
найдем, используя теорему о движении центра масс:
e
Третье дифференциальное уравнение, описывающее
вращательное движение тела вокруг центра масс,
найдем, используя теорему об изменении кинетического
момента системы:
MaC R .
dK z
M ze .
dt
xC f1 (t );
M x C R xe Fixe ;
M y C R ye Fiye .
yC f 2 (t );
f 3 (t ).
I z M ze M ize .
Подобным образом с использованием различных теорем динамики могут быть получены соответствующие уравнения при рассмотрении
динамики других более сложных видов движения твердого тела (сферическое, свободное, ударное взаимодействие).
Принцип Даламбера (Германа, Эйлера) – общий метод, при помощи которого уравнениям динамики по форме придается вид
уравнений статики. Благодаря простоте этот метод получил широкое применение во многих прикладных дисциплинах.
Принцип Даламбера для материальной точки. Основное уравнение динамики точки:
ma Pi .
Перенесем произведение массы на ускорение в правую часть:
0 Pi ma .
Получившееся дополнительное слагаемое
имеет размерность силы и принимается за силу
инерции, направленную в сторону
противоположную ускорению:
ma .
R
С введением силы инерции уравнение динамики
Pi 0.
точки принимает вид уравнения равновесия:
Таким образом, геометрическая сумма приложенных к точке сил и силы инерции этой
точки равна нулю. Сила инерции условно добавляется к действующим на точку силам,
образуя взаимно уравновешенную систему сил.
ay
Пример 1: Кабина лифта весом G
G
Определяем реакцию троса:R G G a y G(1
).
поднимается тросом с ускорением a.
g
g
Определить натяжение троса.
ay
Определяем натяжение троса: T R ; T R G(1
).
1. Выбираем объект (кабина лифта).
g
2. Отбрасываем связь (трос) и заменяем реакцией R.
3. Добавляем к действующим силам силу инерции: ma .
a
G
4. Составляем уравнение равновесия: Yi 0;
R G 0.
Сравните ход решения и результат с
примером 1 в лекции 2 (стр.3)
9
12.
Лекция 11 (продолжение – 11.3)Пример 2: Груз весом G подвешен на тросе длиной l и движется по круговой траектории в горизонтальной
плоскости с некоторой скоростью. Угол отклонения троса от вертикали равен .
Определить натяжение троса и скорость груза.
y
l
R
1. Выбираем объект (груз).
2. Отбрасываем связь (трос) и заменяем реакцией R.
v2
v2
n ma n ; n m
m
.
x 4. Составляем уравнение равновесия:
l sin
Yi 0; R cos G 0.
3. Добавляем к действующим силам силу инерции:
an
G
Из первого уравнения определяем
реакцию троса:
Подставляем значение реакции троса и силы инерции
во второе уравнение и определяем скорость груза:
-
X i 0; - R sin 0.
R
Сложим все n уравнений:
k
Определяем натяжение троса:
G
G v2
sin
0. v
cos
g l sin
■
Принцип Даламбера для несвободной механической системы.
Принцип Даламбера для k-той точки:
P R 0.
k
G
.
cos
k
Pk Rk k 0.
Таким образом, геометрическая сумма
P * R * * 0.
главных векторов задаваемых сил,
реакций связи и сил инерции материальных
точек равна нулю.
gl sin 2
.
cos
rk Pk rk Rk rk k 0.
Таким образом, геометрическая сумма
M OP M OR M O 0.
главных моментов задаваемых сил,
реакций связи и сил инерции материальных
точек относительно любого центра равна нулю.
■
G
.
cos
Сравните ход решения и результат с
примером 3 в лекции 2 (стр.4).
Здесь Pk – равнодействующая задаваемых сил, приложенных к точке,
Rk – равнодействующая реакций связей, приложенных к точке,
Фk = - mak – сила инерции точки.
Здесь P* – главный вектор задаваемых сил, приложенных к точке,
R* – главный вектор реакций связей, приложенных к точке,
Ф*– главный вектор сил инерции точек системы.
Умножим уравнение, выражающее принцип Даламбера на радиус-вектор, проведенный из центра O к точке:
Сложим все n уравнений:
T R ; T R
rk Pk rk Rk rk k 0.
P – главный момент задаваемых сил относительно центра O,
Здесь MO
MOR– главный момент реакций связей относительно центра O,
MOФ– главный момент сил инерции точек системы относительно
центра O.
Приведение сил инерции точек твердого тела к простейшему виду - В динамике за центр приведения принимается обычно центр масс
системы. В результате приведения сил инерции в общем случае получается главный вектор сил инерции и главный момент сил
инерции относительно центра масс:
*
k mk a k ;
M C M iC
rk mk a k .
10
13.
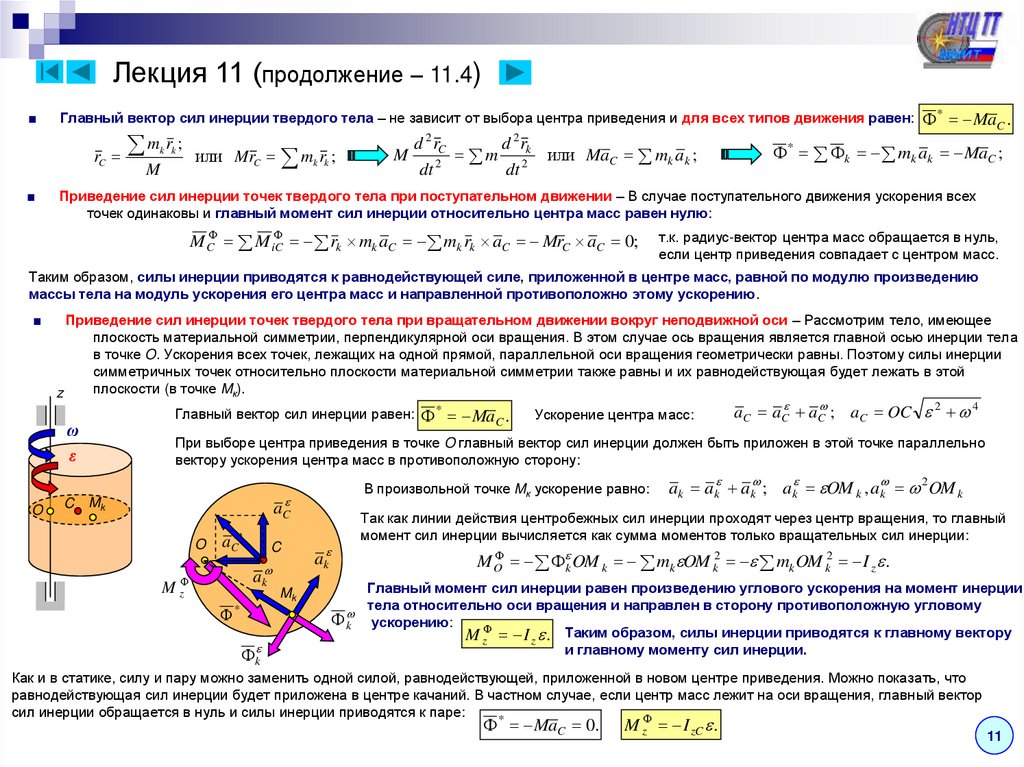
Лекция 11 (продолжение – 11.4)■
Главный вектор сил инерции твердого тела – не зависит от выбора центра приведения и для всех типов движения равен: * MaC .
rC
■
m r ; или Mr m r ;
k k
C
M
k k
M
d 2 rC
dt
2
m
d 2 rk
dt
2
или MaC mk ak ;
* k mk ak MaC ;
Приведение сил инерции точек твердого тела при поступательном движении – В случае поступательного движения ускорения всех
точек одинаковы и главный момент сил инерции относительно центра масс равен нулю:
M C M iC
rk mk aC mk rk aC MrC aC 0;
т.к. радиус-вектор центра масс обращается в нуль,
если центр приведения совпадает с центром масс.
Таким образом, силы инерции приводятся к равнодействующей силе, приложенной в центре масс, равной по модулю произведению
массы тела на модуль ускорения его центра масс и направленной противоположно этому ускорению.
■
Приведение сил инерции точек твердого тела при вращательном движении вокруг неподвижной оси – Рассмотрим тело, имеющее
плоскость материальной симметрии, перпендикулярной оси вращения. В этом случае ось вращения является главной осью инерции тела
в точке O. Ускорения всех точек, лежащих на одной прямой, параллельной оси вращения геометрически равны. Поэтому силы инерции
симметричных точек относительно плоскости материальной симметрии также равны и их равнодействующая будет лежать в этой
плоскости (в точке Mк).
z
Главный вектор сил инерции равен: * MaC .
ω
ε
O
C
Ускорение центра масс:
aC aC aC ; aC OC 2 4
При выборе центра приведения в точке O главный вектор сил инерции должен быть приложен в этой точке параллельно
вектору ускорения центра масс в противоположную сторону:
В произвольной точке Mк ускорение равно:
Mk
aC
O
aC
C
ak
M z
*
k
Mk
ak ak ak ; ak OM k , ak 2OM k
Так как линии действия центробежных сил инерции проходят через центр вращения, то главный
момент сил инерции вычисляется как сумма моментов только вращательных сил инерции:
ak
M O k OM k mk OM k2 mk OM k2 I z .
Главный момент сил инерции равен произведению углового ускорения на момент инерции
тела относительно оси вращения и направлен в сторону противоположную угловому
k ускорению:
M z I z . Таким образом, силы инерции приводятся к главному вектору
и главному моменту сил инерции.
Как и в статике, силу и пару можно заменить одной силой, равнодействующей, приложенной в новом центре приведения. Можно показать, что
равнодействующая сил инерции будет приложена в центре качаний. В частном случае, если центр масс лежит на оси вращения, главный вектор
сил инерции обращается в нуль и силы инерции приводятся к паре:
*
MaC 0.
M z I zC .
11
14. Лекция 12
Пример: Однородный стержень OA массы M длиной l, шарнирно подвешенный в точке O к вращающейся оси со угловой скоростью ω, находитсяв относительном равновесии под углом к оси вращения. Определить силы инерции и угол .
z
M O
s
O
x
d
*
dФ
aC
ω
y
ds
Силы инерции в каждой точке стержня пропорциональны осестремительному ускорению, величина которого в
свою очередь пропорциональна расстоянию точки до оси вращения (треугольная эпюра распределения).
Элементарная сила инерции, приложенная к элементарной массе длины ds , расположенной на расстоянии s
от точки О, равна:
d a dm 2 s sin Ads Главный вектор сил инерции находится интегрированием
dФ по длине стержня:
C
G
l
s2
1
1
d s sin Ads sin A sds sin A
2 sin Al 2 M 2 l sin .
2 0 2
2
0
0
*
*
l
2
l
2
2
Этот же результат можно гораздо проще получить
используя ускорение центра масс:
* Ma C M 2
l
sin .
2
A
Главный момент сил инерции нельзя найти по формуле MФ0 = Ix x, т.к. стержень OA находится в относительном равновесии
и x = x = 0. Однако силы инерции от вращения стержня относительно оси z создают момент сил инерции:
l
l
l
s3
1
2
M zd s cos s sin Ads cos sin A s ds cos sin A
2 cos sin Ml 2 * l cos .
3 0 3
3
0
0
O
2
2
Таким образом, силы инерции приводятся к главному вектору,
приложенному в центре приведения O, и главному моменту
относительно этого центра.
Угол можно определить из уравнения относительного
равновесия:
M 0;
iO
2
l
l cos Mg sin 0
3
2
2
2
Полученную
Таким образом,
систему
равнодействующая
силы и пары можно
силзаменить
инерции одной силой,
равнодействующей
приложена в центре
сил
тяжести
инерции,
эпюры
приложенной
распределения
в точке,
M O 2
d
l cos .
отстоящей
сил инерции.
от центра
Такомуприведения
расположению
по перпендикуляру
соответствует
*
3
кцентр
направлению
качаний O
силы
на расстоянии:
1.
M 2
l
2
l
sin l cos Mg sin 0
2
3
2
cos
3g
.
2 2l
■
Приведение сил инерции точек твердого тела при плоском движении – Рассмотрим тело, совершающее плоское движение, и имеющее
плоскость материальной симметрии параллельную плоскости движения.
Это движение может быть разложено на поступательное движение с центром масс тела C и вращательное вокруг
подвижной оси zC, проходящей через центр масс тела перпендикулярно плоскости движения.
yC
* C aC
ε
M zC
zC
xC
В соответствии с этим силы инерции поступательного движения приводятся
к главному вектору сил инерции, приложенному в центре масс,
и главному моменту сил инерции (паре сил, лежащей в плоскости движения):
* MaC .
M zC
I zC .
12
15.
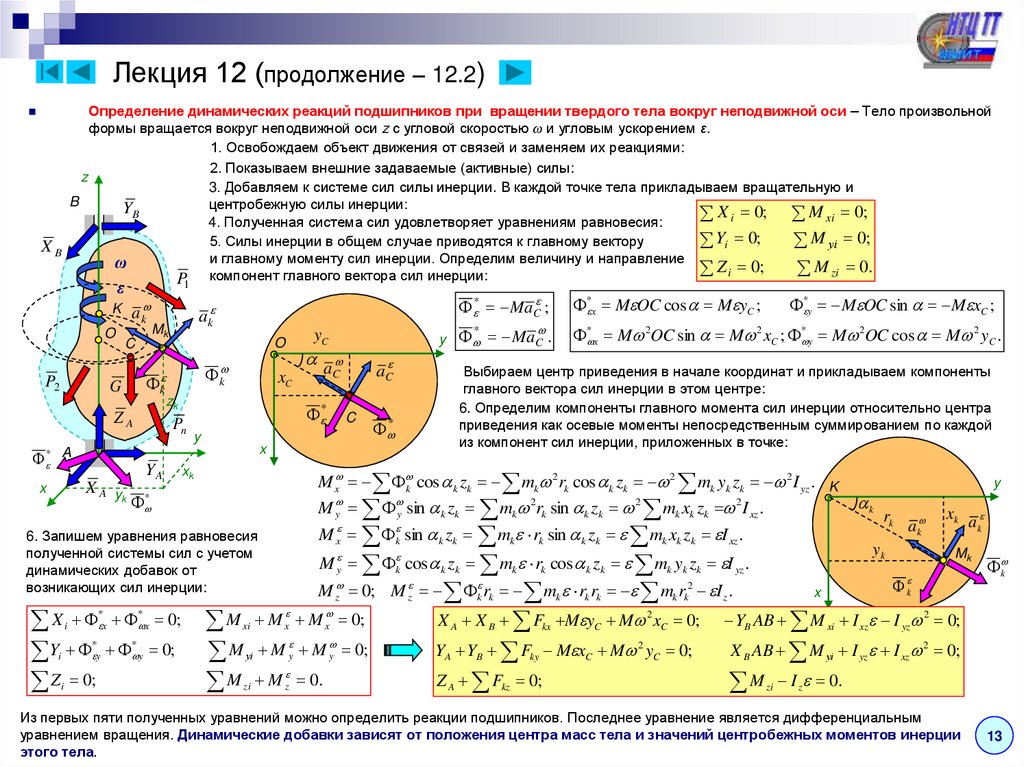
Лекция 12 (продолжение – 12.2)Определение динамических реакций подшипников при вращении твердого тела вокруг неподвижной оси – Тело произвольной
формы вращается вокруг неподвижной оси z с угловой скоростью ω и угловым ускорением ε.
1. Освобождаем объект движения от связей и заменяем их реакциями:
2. Показываем внешние задаваемые (активные) силы:
z
3. Добавляем к системе сил силы инерции. В каждой точке тела прикладываем вращательную и
B
центробежную силы инерции:
YB
X i 0; M xi 0;
4. Полученная система сил удовлетворяет уравнениям равновесия:
Yi 0;
M уi 0;
5. Силы инерции в общем случае приводятся к главному вектору
XB
и
главному
моменту
сил
инерции.
Определим
величину
и
направление
ω
Z i 0;
M zi 0.
P компонент главного вектора сил инерции:
ε
1
a k
K
O
P2
C
Mk
k
ZA
XA y
YA
k
xC
zk
Pn
* A
x
k
*
a
y
aC
C
*
C
x
*
*
y
i
i
Выбираем центр приведения в начале координат и прикладываем компоненты
главного вектора сил инерции в этом центре:
6. Определим компоненты главного момента сил инерции относительно центра
приведения как осевые моменты непосредственным суммированием по каждой
из компонент сил инерции, приложенных в точке:
xi
x
x
уi
y
y
zi
z
y
k
rk
ak
yk
M z 0; M z k rk mk rk rk mk rk2 I z .
*
y
* x M 2OC sin M 2 xC ; * y M 2OC cos M 2 yC .
M y k cos k zk mk rk cos k zk mk yk zk I yz .
*
x
* y M OC sin M xC ;
M x k sin k zk mk rk sin k zk mk xk zk I xz .
X 0; M M M 0;
Y 0; M M M 0;
Z 0;
M M 0.
*
x
*
* x M OC cos M yC ;
M x k cos k zk mk 2 rk cos k zk 2 mk yk zk 2 I yz . K
M y y sin k zk mk 2 rk sin k zk 2 mk xk zk 2 I xz .
xk
6. Запишем уравнения равновесия
полученной системы сил с учетом
динамических добавок от
возникающих сил инерции:
i
y Ma C .
yC
O
G
* MaC ;
ak
x
xk
Mk
k
X A X B Fkx M yC M 2 xC 0;
YB AB M xi I xz I yz 2 0;
Z A Fkz 0;
M I 0.
YA YB Fky M xC M 2 yC 0;
a k
k
X B AB M уi I yz I xz 2 0;
zi
z
Из первых пяти полученных уравнений можно определить реакции подшипников. Последнее уравнение является дифференциальным
уравнением вращения. Динамические добавки зависят от положения центра масс тела и значений центробежных моментов инерции
этого тела.
13
16.
Лекция 12 (продолжение – 12.3)■
Балансировка вращающегося тела – Добавление сил инерции к действующим силам есть результат введения подвижной системы
координат, связанной с вращающимся телом. Полученные уравнения представляют собой относительные уравнения равновесия,
записанные для этой подвижной системы координат:
2
2
z
B
XB
YB
ω
ε
K
O
P2
* A
x
Реакции подшипников разложим
на две составляющие, условно
статическую и дополнительную
(динамическую), например:
a k
C
Mk
k
ak
k
YB AB M xi I xz I yz 0;
Z A Fkz 0;
M I 0.
YA YB Fky M xC M 2 yC 0;
X B AB M уi I yz I xz 2 0;
zi
z
1
1
M yi ; X B
( I xz 2 I yz );
AB
AB
YB YB YB .
1
1
YB
M xi ; YB
( I yz 2 I xz ).
AB
AB
Модуль полной дополнительной
1
2
2
2
2
2
4
динамической реакции равен:
RB ( X B ) (YB )
I xz I yz .
AB
X B X B X B ;
P1
X A X B Fkx M yC M xC 0;
Из 4 и 5 уравнений системы
определим эти составляющие:
X B
Центробежные моменты инерции, вычисляемые относительно подвижных осей, не изменяются при
вращении тела. Модуль полной дополнительной реакции зависит от угловой скорости и ускорения.
В случае установившегося вращения ( = 0 ), величина полной дополнительной реакции
ZA
Pn
пропорциональна квадрату угловой скорости. В современных машинах угловые скорости по величине
y
могут быть значительными, так что дополнительные динамические реакции могут во много раз
превышать статические реакции. Кроме того, направления этой динамической реакции и условно
Y A xk
статической составляющей изменяются по отношению к неподвижной системе координат. Это вызывает
XA y *
k
знакопеременное нагружение опорных узлов, приводящее к их усталостному разрушению.
Если центр масс находится на оси вращения, но главная центральная ось инерции тела не совпадает с осью
вращения, то условно статические реакции при консервативных заданных силах не будут изменяться по величине и по
направлению (см. уравнения 1,2), но дополнительные динамические реакции образуют пару сил:
G
zk
MaC R e Fk RA RA RB RB 0.
RA RB ,
т.к.
F R R 0
по определению условно
статических реакций.
Плоскость действия пары и направления дополнительных реакций вращаются вместе с рассматриваемым телом со всеми вытекающими
отсюда последствиями. При конструировании машин и механизмов необходимо исключить возникновение дополнительных динамических
реакций. Для этого вращающиеся элементы должны иметь нулевые центробежные моменты инерции, т.е. главная центральная ось должна
совпадать с осью вращения.
При изготовлении таких элементов возможны незначительные отклонения в размерах, которые приводят к неуравновешенности
возникающих при вращении сил инерции и возникновению дополнительных динамических реакций на опорные устройства. Для
предотвращения этого выполняется балансировка - введение дополнительных масс, силы инерции которых уменьшают
14
неуравновешенность сил инерции тела, или, напротив, высверливание части материала, что изменяет распределение сил инерции.
k
A
B
17. Лекция 13
■Аналитическая механика – устанавливает общие, единые методы изучения движения и равновесия любых самых сложных материальных
систем средствами математического анализа. Для этого вводятся новые понятия и обобщаются старые.
■
Связи – рассматриваются теперь как некоторые условия, налагаемые на систему, которые должны удовлетворяться в процессе движения
системы. Они содержат соотношения (уравнения или неравенства) между координатами, компонентами скоростей и ускорений и,
возможно, времени.
Классификация связей: По интегрируемости:
Голономные (геометрические) – выражаются конечными уравнениями относительно координат или интегрируемыми дифференциальными
уравнениями относительно координат:
(x , y , z , t) 0
k
k
k
Неголономные (кинематические) - выражаются неинтегрируемыми дифференциальными уравнениями относительно координат,
( xk , yk , zk , x k , y k , z k , t ) 0
т.е. уравнениями, содержащими не только координаты точек системы, но и их производные по времени:
Неинтегрируемость состоит в том, что их нельзя привести к виду уравнений голономной связи.
По зависимости от времени:
( xk , yk , zk ) 0
Склерономные (стационарные) – не зависящие от времени:
Например, уравнение траектории, полученное для некоторой точки шатуна кривошипно-шатунного механизма:
Если
на систему N точек в пространстве наложено m голономных связей,
2
x то
y2
рассматривается как уравнение cклерономной голономной связи:
декартовые координаты всегда могут быть выражены конечными
2 1
2
a соотношениями:
b
x1 x1 (q1 , колебаний.
q2 ,..., qn , t );
Реономные (нестационарные) – зависящие от времени. Например, кинематическое возбуждение
По освобождаемости:
x2 x2 (q1 , q2 ,..., qn , t ); Число обобщенных координат
Неосвобождающие (удерживающие или двухсторонние) – описываются уравнением, исключающим возможностьравно
покидания
n = 3Nточкой
– m. траектории
..................................;
или поверхности, описываемой уравнением. Этому соответствует, например, жесткая связь в виде шарнирного стержня.
x N x1 (q1 , q2 ,..., qn , tсвязь
).
Освобождающие (неудерживающие или односторонние) – выражаются неравенством, 3регламентирующим
лишь в одном направлении,
например, гибкая нить или гладкая поверхность.
■
■
Обобщенные координаты – независимые параметры, однозначно определяющее положение механической системы при ее движении.
Обобщенность состоит в том, что они могут иметь различную природу (линейные или угловые перемещения относительно некоторого
начального положения или какие-либо другие величины). Общее обозначение – qi (i = 1,…,n).
Число степеней свободы – число независимых обобщенных координат, через которые можно выразить декартовые координаты всех точек
системы. Например:
x A l cos ; Здесь положение любой точки стержня (например, А) однозначно определяется
y
xA
значением всего одной величины – угла , который является обобщенной
A y A l sin
координатой (q = ). Число степеней свободы равно n = 1.
l
Уравнение связи для рассматриваемой точки A:
yA
x2 y 2 l 2
x
O
15
18.
Лекция 13 (продолжение – 13.2)■
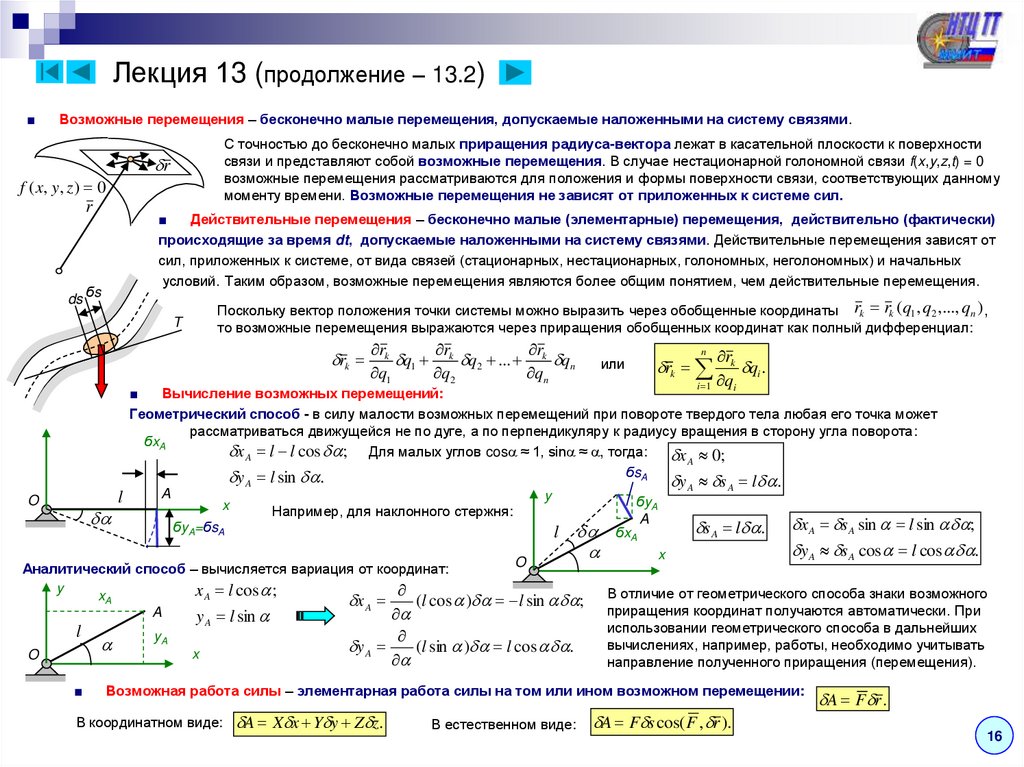
Возможные перемещения – бесконечно малые перемещения, допускаемые наложенными на систему связями.
С точностью до бесконечно малых приращения радиуса-вектора лежат в касательной плоскости к поверхности
связи и представляют собой возможные перемещения. В случае нестационарной голономной связи f(x,y,z,t) = 0
возможные перемещения рассматриваются для положения и формы поверхности связи, соответствующих данному
моменту времени. Возможные перемещения не зависят от приложенных к системе сил.
r
f ( x, y , z ) 0
r
■
Действительные перемещения – бесконечно малые (элементарные) перемещения, действительно (фактически)
происходящие за время dt, допускаемые наложенными на систему связями. Действительные перемещения зависят от
сил, приложенных к системе, от вида связей (стационарных, нестационарных, голономных, неголономных) и начальных
условий. Таким образом, возможные перемещения являются более общим понятием, чем действительные перемещения.
ds бs
Поскольку вектор положения точки системы можно выразить через обобщенные координаты rk rk (q1 , q2 ,..., qn ) ,
то возможные перемещения выражаются через приращения обобщенных координат как полный дифференциал:
T
rk
rk
r
r
q1 k q2 ... k qn
q1
q2
qn
или
rk
qi .
i 1 qi
n
rk
■
Вычисление возможных перемещений:
Геометрический способ - в силу малости возможных перемещений при повороте твердого тела любая его точка может
рассматриваться движущейся не по дуге, а по перпендикуляру к радиусу вращения в сторону угла поворота:
бxA
x A l l cos ; Для малых углов cos ≈ 1, sin ≈ , тогда: x A 0;
бsA
y A l sin .
y A s A l .
A
y
l
бyA
x
Например, для наклонного стержня:
A
бyA=бsA
s A l . x A s A sin l sin ;
l бxA
O
O
Аналитический способ – вычисляется вариация от координат:
y
x A l cos ;
xA
x A
(l cos ) l sin ;
A
y l sin
l
O
■
A
yA
x
y A
(l sin ) l cos .
x
y A s A cos l cos .
В отличие от геометрического способа знаки возможного
приращения координат получаются автоматически. При
использовании геометрического способа в дальнейших
вычислениях, например, работы, необходимо учитывать
направление полученного приращения (перемещения).
Возможная работа силы – элементарная работа силы на том или ином возможном перемещении:
В координатном виде:
A X x Y y Z z.
В естественном виде:
A F s cos( F , r ).
A F r .
16
19.
Лекция 13 (продолжение – 13.3)■
Идеальные связи – связи, при которых сумма элементарных работ сил реакций связи на любом возможном перемещении равна
нулю:
n
Примеры идеальных связей: абсолютно гладкая поверхность (при скольжении), абсолютно
A R Rk rk 0.
твердая поверхность (при качении без скольжения). Любую неидеальную связь можно
рассматривать как идеальную, если соответствующие реакции связи (совершающие работу
на возможных перемещения) причислить к задаваемым (активным) силам.
Принцип возможных перемещений – Для равновесия материальной системы, подчиненной голономным, стационарным,
двухсторонним и идеальным связям, необходимо и достаточно, чтобы сумма элементарных работ всех активных сил на
любом возможном перемещении из предполагаемого положения равновесия равнялось нулю:
n
k 1
■
n
Доказательство необходимости: Система находится
в равновесии и для каждой точки удовлетворяется
уравнение равновесия:
Fk Rk 0.
Умножим скалярно на вектор возможного перемещения
точки и сложим:
n
F r R r 0.
k
k
k
A F F r 0.
k k
Доказательство достаточности: Дано:
Fk rk 0.
k 1
Предположим, что равновесия нет.
k 1
Тогда каждая из точек под действием активных сил придет в движение, переместится
за время dt на малое действительное перемещение dr. Рассматривая эти
Получили противоречие
с исходным
перемещения,
как возможные,
вычислимравенством.
работу и просуммируем:
F
Значит
предположение
об
отсутствии
равновесия
A Fk rk 0. ( F R )dr ( F R ) r 0.
( Fk Rk ) rk Fk rk Rk rk 0.
kневерно.
k
k
k
k
k
k 1
k
=0
=0
■
Примеры использования принципа возможных перемещений для определения реакций связей:
Заметим, что
Пример 1. Определить реакцию балки в правой опоре:
1. для нахождения опорного момента MA
Балка неподвижна и не имеет ни возможных, ни действительных перемещений.
Отбросим связь, реакция
из уравнений статики потребовалось бы решить как
ее реакцией:
RB которой отыскивается, и заменим
P
минимум три уравнения равновесия;
Без правой опоры балка может
поворачиваться
действием пропорциональна
активных сил, реакцию RB причисляем к активным
A
B
2. эпюра
возможных под
перемещений
силам.
Зададим
малое
возможное
перемещение:
линии влияния усилия;
бsP
б
3. если задать
для искомой
sPвозможное
a ; sBперемещение
l .
бsB Вычислим возможные перемещения:
a
реакции
равным
1,
например,
б
=1,
то
эпюра
Pa Pa
Запишем сумму работ:
RB
.
l
Pa линии
RBl 0.
перемещений
AP R P sP будет
RB sBполностью
0.
тождественна
l
l
влияния поскольку
A балке
M A 1в левой
1 s F опоре:
( z) 0; M A s F ( z).
Пример 2. Определить опорный момент многопролетной составной
Запишем сумму работ:
Отбросим в жесткой заделке связь, препятствующую повороту балки, и заменим ее парой сил MA:
A M A F sF 0.
A
MA
C
B
б
l
бsD
D
P
E
бsP
бsB
b
b
a
l
Вычислим возможные перемещения:
sB l ;
sD sB l ;
sF
a
a
sD
l .
l a
l a
M A F
a
l 0.
l a
M A F
a
l.
l a
17
20. Лекция 14
■Общее уравнение динамики – Принцип возможных перемещений, дающий общий метод решения задач статики, можно применить к
решению задач динамики, а именно:
1. Применить принцип Даламбера, сводящий задачу динамики с задаче статики: Pk Rk k 0; ( k 1,2,..., N )
2. Применить принцип возможных перемещений, решающий эту статическую задачу:
Pk s k cos( Pk , s k ) Rk s k cos( Rk , s k ) k s k cos( k , s k ) 0; (k 1,2,..., N )
Просуммируем по всем точкам:
Получим
общее уравнение динамики:
Более короткие записи
общего уравнения динамики:
A 0,
Или еще короче:
Pk s k cos( Pk , s k ) Rk s k cos( Rk , s k ) k s k cos( k , s k ) 0.
= 0 – для идеальных связей
Pk s k cos( Pk , s k ) k s k cos( k , s k ) 0. В любой момент времени сумма работ всех задаваемых
( Pk k ) rk 0 или ( Pk mk a k ) rk 0.
сил и сил инерции несвободной механической системы с
двухсторонними идеальными связями на любом
возможном перемещении равна нулю.
где бA – возможная работа всех задаваемых сил и сил инерции на любом возможном перемещении.
Пример. Центробежный регулятор вращается вокруг вертикальной оси с постоянной скоростью. При = 0 пружина не деформирована.
Жесткость пружины c. Длина каждого из стержней l. Плечо подвески a. Вес каждого из шаров G, вес муфты G1. Определить угловую
скорость установившегося вращения для данного угла .
G
G
1. Покажем заданные силы:
maос ;
2. Добавим силы инерции:
maос 2 (a l sin ).
g
x
3. Упругая связь (пружина), не являющаяся идеальной (совершает работу на возможных перемещениях), должна
быть отброшена и заменена реакцией, которая включается в число заданных сил:
R
l
a
a ос A
a ос
Модуль реакции пружины пропорционален изменению
R c l c(2l 2l cos ) 2cl (1 cos ).
длины (укорочению) пружины:
4.
Определим
проекции
возможных
перемещений
G
x A l cos ;
x A a l sin ;
R
(вариации координат) точек приложения сил:
l
G1
B
y
5. Составим общее уравнение динамики:
A 2G y A (G1 R) y B 2 x A 0
Подставим значения сил инерции
и реакции пружины:
y A l cos ;
y B 2l cos .
2G( l sin ) (G1 2cl (1 cos ))( 2l sin ) 2
Отсюда после некоторых сокращений
и упрощений:
(G G1 2cl (1 cos )) g tg
G (a l sin )
y A l sin ;
y B 2l sin .
G 2
(a l sin )l cos 0
g
18
21.
Лекция 14 (продолжение – 14.2)■
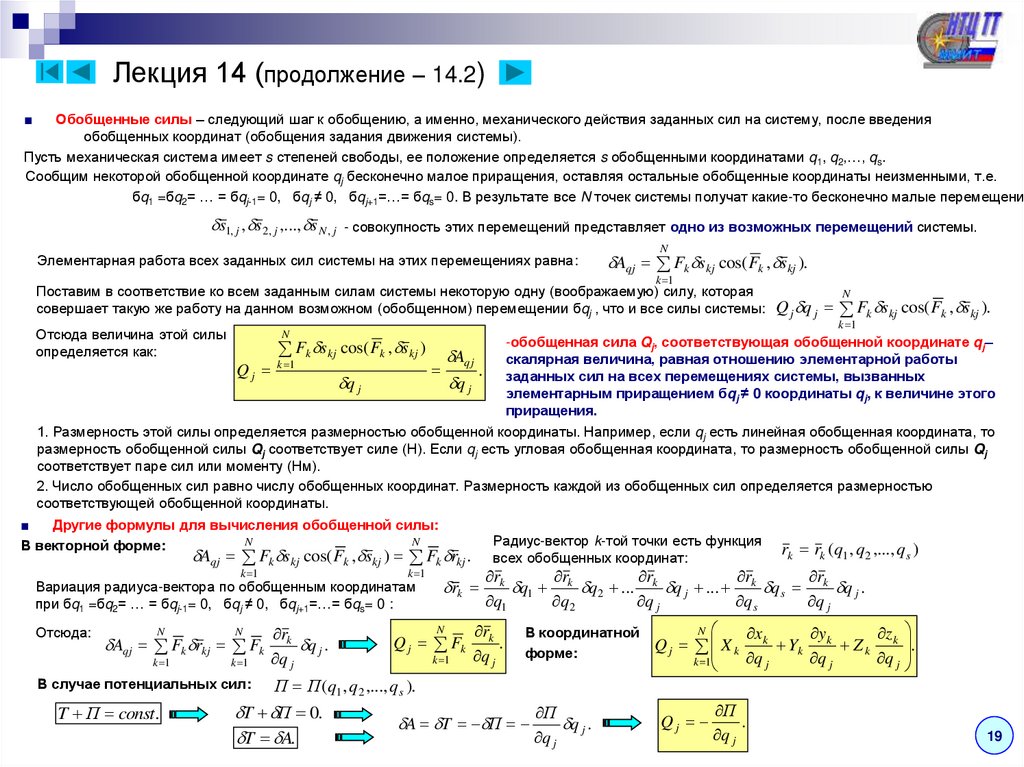
Обобщенные силы – следующий шаг к обобщению, а именно, механического действия заданных сил на систему, после введения
обобщенных координат (обобщения задания движения системы).
Пусть механическая система имеет s степеней свободы, ее положение определяется s обобщенными координатами q1, q2,…, qs.
Сообщим некоторой обобщенной координате qj бесконечно малое приращения, оставляя остальные обобщенные координаты неизменными, т.е.
бq1 =бq2= … = бqj-1= 0, бqj ≠ 0, бqj+1=…= бqs= 0. В результате все N точек системы получат какие-то бесконечно малые перемещения
s1, j , s 2, j ,..., s N , j - совокупность этих перемещений представляет одно из возможных перемещений системы.
Элементарная работа всех заданных сил системы на этих перемещениях равна:
N
Aqj Fk skj cos( Fk , skj ).
k 1
Поставим в соответствие ко всем заданным силам системы некоторую одну (воображаемую) силу, которая
N
совершает такую же работу на данном возможном (обобщенном) перемещении бqj , что и все силы системы: Q j q j Fk s kj cos( Fk , s kj ).
Отсюда величина этой силы
определяется как:
k 1
N
-обобщенная сила Qj, соответствующая обобщенной координате qj–
скалярная величина, равная отношению элементарной работы
Qj
заданных сил на всех перемещениях системы, вызванных
q j
элементарным приращением бqj ≠ 0 координаты qj, к величине этого
приращения.
1. Размерность этой силы определяется размерностью обобщенной координаты. Например, если qj есть линейная обобщенная координата, то
размерность обобщенной силы Qj соответствует силе (Н). Если qj есть угловая обобщенная координата, то размерность обобщенной силы Qj
соответствует паре сил или моменту (Нм).
2. Число обобщенных сил равно числу обобщенных координат. Размерность каждой из обобщенных сил определяется размерностью
соответствующей обобщенной координаты.
Fk s kj cos( Fk , s kj )
k 1
Aqj
.
q j
■
Другие формулы для вычисления обобщенной силы:
N
N
В векторной форме:
Радиус-вектор k-той точки есть функция
всех обобщенных координат:
Aqj Fk skj cos( Fk , skj ) Fk rkj .
k 1
k 1
Вариация радиуса-вектора по обобщенным координатам
при бq1 =бq2= … = бqj-1= 0, бqj ≠ 0, бqj+1=…= бqs= 0 :
Отсюда:
N
N
k 1
k 1
Aqj Fk rkj Fk
В случае потенциальных сил:
T П const.
rk
q j .
q j
rk
N
Q j Fk
k 1
rk rk (q1 , q2 ,..., q s )
rk
r
r
r
r
q1 k q 2 ... k q j ... k q s k q j .
q1
q 2
q j
q s
q j
rk
.
q j
В координатной
форме:
N
x
y
z
Q j X k k Yk k Z k k .
q j
q j
q j
k 1
П П (q1 , q2 ,..., q s ).
T П 0.
T A.
A T П
П
q j .
q j
Qj
П
.
q j
19
22.
Лекция 14 (продолжение – 14.3)■
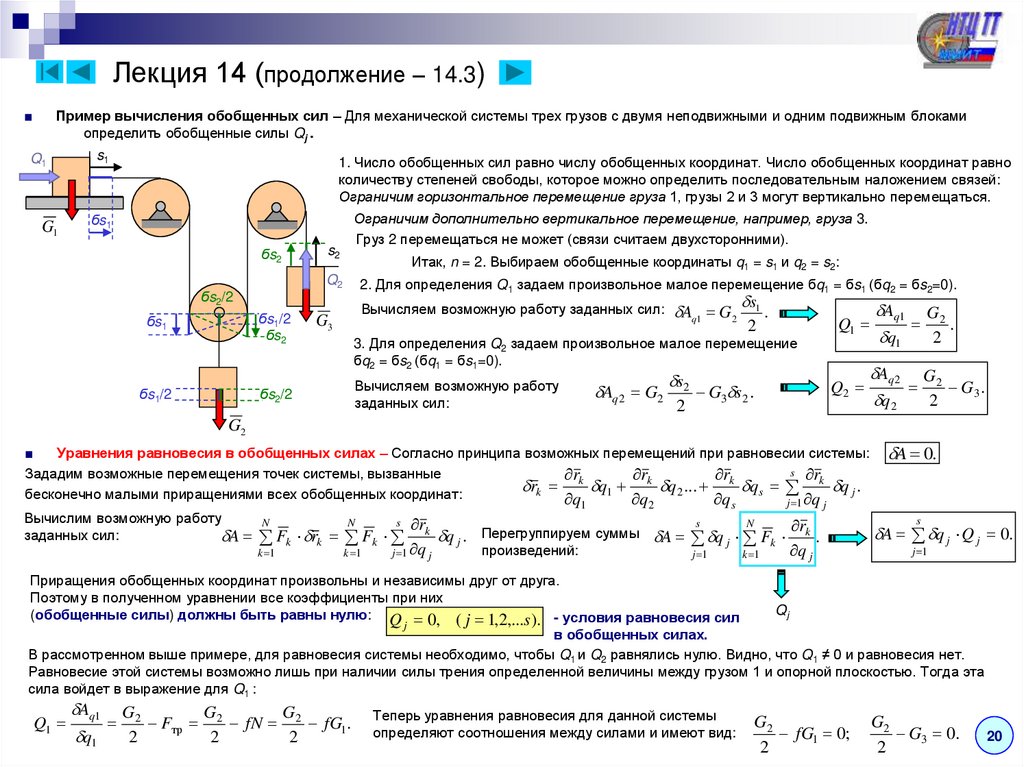
Пример вычисления обобщенных сил – Для механической системы трех грузов с двумя неподвижными и одним подвижным блоками
определить обобщенные силы Qj .
Q1
G1
s1
1. Число обобщенных сил равно числу обобщенных координат. Число обобщенных координат равно
количеству степеней свободы, которое можно определить последовательным наложением связей:
Ограничим горизонтальное перемещение груза 1, грузы 2 и 3 могут вертикально перемещаться.
Ограничим дополнительно вертикальное перемещение, например, груза 3.
Груз 2 перемещаться не может (связи считаем двухсторонними).
бs1
бs2
бs1/2
бs2
бs1/2
Итак, n = 2. Выбираем обобщенные координаты q1 = s1 и q2 = s2:
Q2
бs2/2
бs1
s2
2. Для определения Q1 задаем произвольное малое перемещение бq1 = бs1 (бq2 = бs2=0).
Вычисляем возможную работу заданных сил: A G s1 .
q1
2
G3
Q1
2
3. Для определения Q2 задаем произвольное малое перемещение
бq2 = бs2 (бq1 = бs1=0).
Вычисляем возможную работу
заданных сил:
бs2/2
Aq 2 G2
s2
2
Q2
G3 s2 .
Aq1 G2
.
q1
2
Aq 2 G2
G3 .
q 2
2
G2
■
Уравнения равновесия в обобщенных силах – Согласно принципа возможных перемещений при равновесии системы:
s r
Зададим возможные перемещения точек системы, вызванные
rk
rk
rk
k
r
q
q
...
q
q j .
k
1
2
s
бесконечно малыми приращениями всех обобщенных координат:
q
q
q
q
Вычислим возможную работу
N
N
s r
заданных сил:
A Fk rk Fk k q j .
k 1
k 1
j 1 q j
1
Перегруппируем суммы
произведений:
2
j 1
s
s
N
j 1
k 1
A q j Fk
A 0.
j
rk
.
q j
s
A q j Q j 0.
j 1
Приращения обобщенных координат произвольны и независимы друг от друга.
Поэтому в полученном уравнении все коэффициенты при них
Qj
(обобщенные силы) должны быть равны нулю: Q 0, ( j 1,2,...s ). - условия равновесия сил
j
в обобщенных силах.
В рассмотренном выше примере, для равновесия системы необходимо, чтобы Q1 и Q2 равнялись нулю. Видно, что Q1 ≠ 0 и равновесия нет.
Равновесие этой системы возможно лишь при наличии силы трения определенной величины между грузом 1 и опорной плоскостью. Тогда эта
сила войдет в выражение для Q1 :
Q1
Aq1 G2
G
G
Fтр 2 fN 2 fG1 .
q1
2
2
2
Теперь уравнения равновесия для данной системы
определяют соотношения между силами и имеют вид:
G2
fG1 0;
2
G2
G3 0.
2
20
23. Лекция 15
■Уравнение Лагранжа II рода – Уравнения представляют собой дифференциальные уравнения движения системы относительно обобщенных
координат системы. Воспользуемся общим уравнением динамики:
A 0, где бA – возможная работа всех задаваемых сил
1. Зададим возможные перемещения точек системы, вызванные
бесконечно малыми приращениями всех обобщенных координат:
и сил инерции на любом возможном перемещении.
s r
rk
r
r
q1 k q 2 ... k q s k q j .
q1
q 2
q s
j 1 q j
Вычислим возможную работу
N
N
s r
заданных сил и сил инерции: A ( F ) r ( F ) k q .
k
k
k
k
k
j
k 1
k 1
j 1 q j
s
Перегруппируем суммы
s
N
N
s
N
r
r
r
A q j (Q j Q j ) 0.
A q j ( Fk k ) k или A q j ( Fk k k k ).
произведений:
q j k 1
q j
q j
j 1
j 1
k 1
j 1
k 1
rk
Приращения обобщенных координат произвольны и независимы друг от друга.
Поэтому в полученном уравнении все коэффициенты при них
(обобщенные силы) должны быть равны нулю:
Q j Q j 0, ( j 1,2,...s).
QjФ
Qj
- уравнения движения системы, эквивалентные
общему уравнению динамики.
Ф
2. В обобщенные силы инерции Qj входят массы и ускорения точек системы. Попытаемся выразить эти силы через скорости точек и в конечном
N
N
N
итоге через кинетическую энергию:
rk
rk
dv k rk
Q j k
k 1
Добавим к этому выражению два
одинаковых слагаемых разного знака
и следующего вида:
Вычислим частную производную кинетической
координате:
энергии системы по обобщенной
Таким образом: Q d T T .
q j
N
mk
k 1
mk a k
k 1
drk v k
.
dt q j
q j
mk
k 1
dt
N
Q j mk
k 1
N
v v 1 N
v
v
v
T
Nj
mk kdt k q j qmjk ( k vk vk k ) mk vk k
q j q j k 1
2 2 k 1
q j
q j
d qTj k 1T
Подставим
в
уравнение
движения:
Q
0
.
jN
Производная по обобщенной скорости
T
q v kj q j
mdt
имеет аналогичное выражение:
k v
k
q
q
k
1
j
j
d T T
Q j ( j 1,2,..., s ). - уравнения Лагранжа II рода.
Отсюда: производную
Вычислим
dt q j по
q j времени от частной производной кинетической энергии
системы по обобщенной скорости:
T d N
v
v П N
dv Tv N T
d П
Для dконсервативных
Q
mjk v k k . mk k k mk
vk k( j 1,2,..., s).
k 1
(потенциальных)
dt q j dtсил:
q qj j k 1 dtdt q q jj k 1q j
dt q j q j
q j
.
N
N
dv k rk
dr v
dr v
mk k k mk k k .
dt q j k 1
dt q j k 1
dt q j
v k
q k
d T
dt q j
vk
v k drk
q j dt
T
q j
vk
d rk
dt q j
v k
q k
21
24.
Лекция 15 (продолжение – 15.2)■
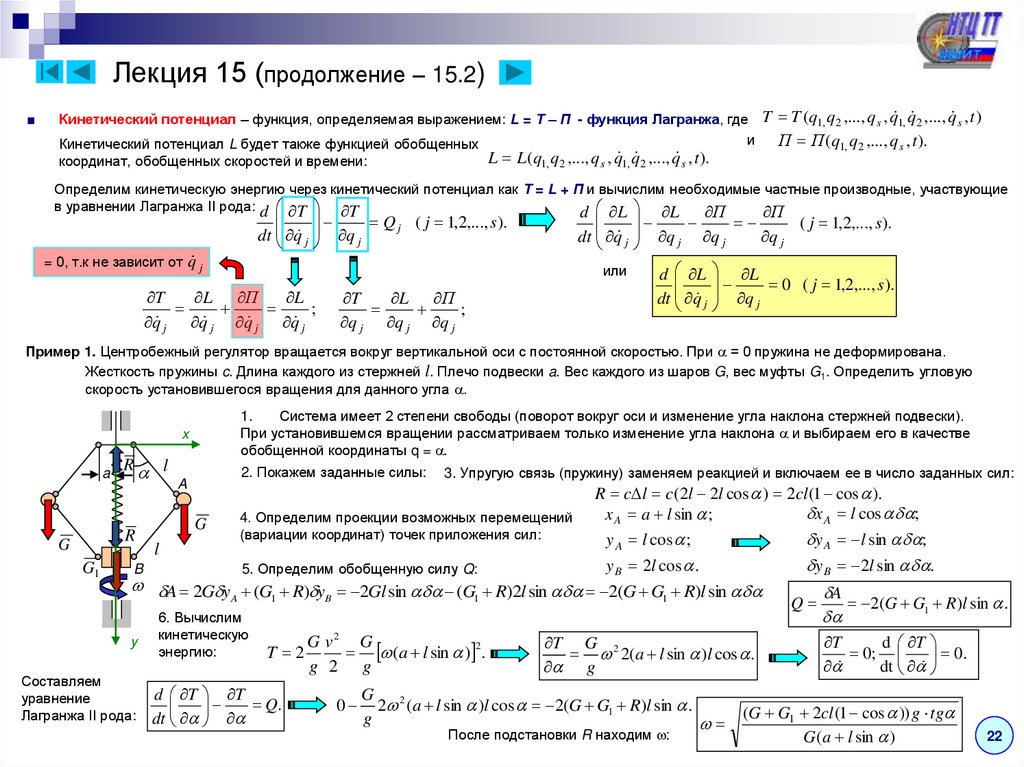
Кинетический потенциал – функция, определяемая выражением: L = T – П - функция Лагранжа, где T T (q1, q 2 ,..., q s , q 1, q 2 ,..., q s , t )
и
П П (q1, q 2 ,..., q s , t ).
Кинетический потенциал L будет также функцией обобщенных
L L(q1, q 2 ,..., q s , q 1, q 2 ,..., q s , t ).
координат, обобщенных скоростей и времени:
Определим кинетическую энергию через кинетический потенциал как T = L + П и вычислим необходимые частные производные, участвующие
в уравнении Лагранжа II рода: d T T
d L L П
П
Q j ( j 1,2,..., s ).
dt q j q j
( j 1,2,..., s).
dt q j q j q j
q j
= 0, т.к не зависит от q j
или
T
L П
L
;
q j q j q j q j
T
L П
;
q j q j q j
d L L
0 ( j 1,2,..., s ).
dt q j q j
Пример 1. Центробежный регулятор вращается вокруг вертикальной оси с постоянной скоростью. При = 0 пружина не деформирована.
Жесткость пружины c. Длина каждого из стержней l. Плечо подвески a. Вес каждого из шаров G, вес муфты G1. Определить угловую
скорость установившегося вращения для данного угла .
1.
Система имеет 2 степени свободы (поворот вокруг оси и изменение угла наклона стержней подвески).
При установившемся вращении рассматриваем только изменение угла наклона и выбираем его в качестве
обобщенной координаты q = .
x
a
R l
R
G
G1
2. Покажем заданные силы:
A
G
l
3. Упругую связь (пружину) заменяем реакцией и включаем ее в число заданных сил:
4. Определим проекции возможных перемещений
(вариации координат) точек приложения сил:
R c l c(2l 2l cos ) 2cl (1 cos ).
x A l cos ;
x A a l sin ;
y A l cos ;
y B 2l cos .
B
5. Определим обобщенную силу Q:
A 2G y (G R) y 2Gl sin (G R)2l sin 2(G G R)l sin
A
1
B
1
1
y
Составляем
уравнение
Лагранжа II рода:
6. Вычислим
кинетическую
энергию:
T 2
d T T
Q.
dt
G v2 G
2
(a l sin ) .
g 2 g
0
T G 2
2(a l sin )l cos .
g
G 2
2 (a l sin )l cos 2(G G1 R)l sin .
g
После подстановки R находим :
y A l sin ;
y B 2l sin .
Q
A
2(G G1 R )l sin .
T
d T
0;
0.
dt
(G G1 2cl (1 cos )) g tg
G (a l sin )
22
25.
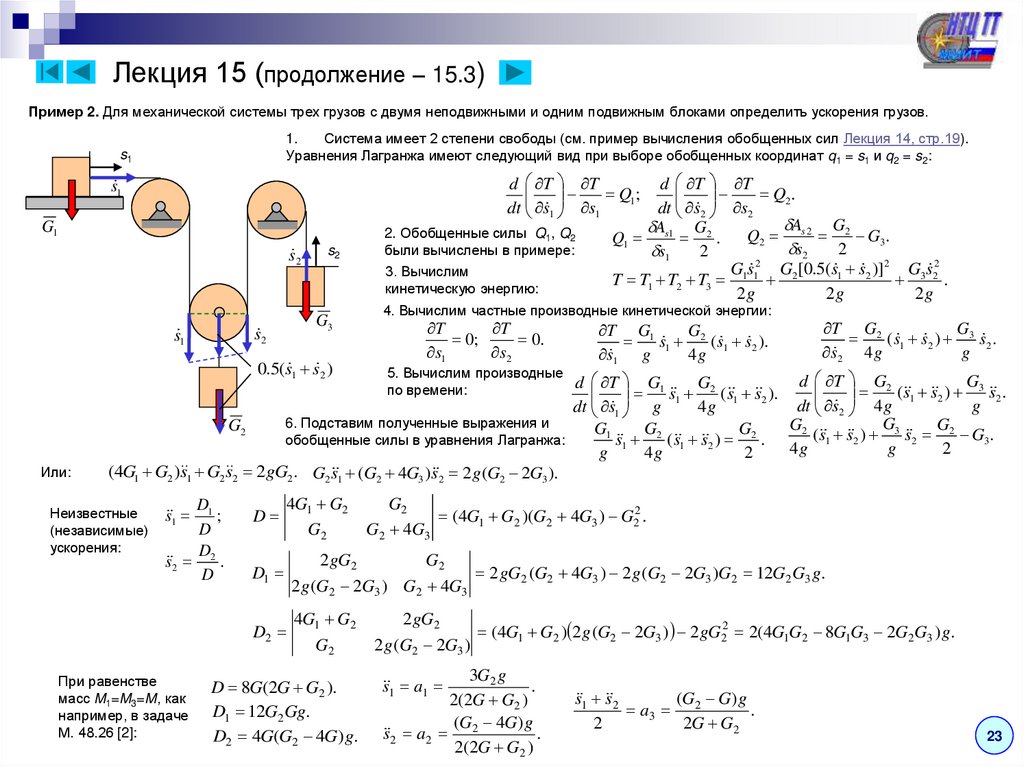
Лекция 15 (продолжение – 15.3)Пример 2. Для механической системы трех грузов с двумя неподвижными и одним подвижным блоками определить ускорения грузов.
1.
Система имеет 2 степени свободы (см. пример вычисления обобщенных сил Лекция 14, стр.19).
Уравнения Лагранжа имеют следующий вид при выборе обобщенных координат q1 = s1 и q2 = s2:
s1
s 1
G1
s 2
G3
s 2
s 1
s2
0.5(s 1 s 2 )
Или:
d T T
d T T
Q1;
Q2 .
dt s 1 s1
dt s 2 s2
A
G
A
G
2. Обобщенные силы Q1, Q2
Q2 s 2 2 G3 .
Q1 s1 2 .
s2
2
были вычислены в примере:
s1
2
2
G1s 1 G2 [0.5( s 1 s 2 )]2 G3 s 22
3. Вычислим
T
T
T
T
.
1
2
3
кинетическую энергию:
2g
2g
2g
4. Вычислим частные производные кинетической энергии:
T
T
0;
0.
s1
s2
5. Вычислим производные
по времени:
T G1
G
s 1 2 ( s 1 s 2 ).
s 1 g
4g
G
T G2
( s 1 s 2 ) 3 s 2 .
s 2 4 g
g
G
d T G2
d T G1
G
( s 1 s 2 ) 3 s 2 .
s 1 2 ( s 1 s 2 ).
dt s 2 4 g
g
dt s 1 g
4g
6. Подставим полученные выражения и
G
G
G
G2
2
G1
G
G
( s 1 s 2 ) 3 s 2 2 G3 .
s 1 2 ( s 1 s 2 ) 2 .
обобщенные силы в уравнения Лагранжа:
4
g
g
2
g
4g
2
(4G1 G2 ) s 1 G2 s 2 2gG2 . G2 s 1 (G2 4G3 ) s 2 2 g (G2 2G3 ).
Неизвестные
(независимые)
ускорения:
D1
;
D
D
s 2 2 .
D
s 1
При равенстве
масс M1=M3=M, как
например, в задаче
М. 48.26 [2]:
D
4G1 G2
G2
D1
2 gG2
G2
2 gG2 (G2 4G3 ) 2 g (G2 2G3 )G2 12G2 G3 g.
2 g (G2 2G3 ) G2 4G3
D2
4G1 G2
G2
D 8G(2G G2 ).
D1 12G2Gg.
D2 4G(G2 4G) g.
G2
(4G1 G2 )(G2 4G3 ) G22 .
G2 4G3
2 gG2
(4G1 G2 ) 2 g (G2 2G3 ) 2 gG22 2(4G1G2 8G1G3 2G2 G3 ) g.
2 g (G2 2G3 )
3G2 g
.
2(2G G2 )
(G 4G) g
s 2 a2 2
.
2(2G G2 )
s 1 a1
s 1 s 2
(G G) g
a3 2
.
2
2G G2
23
26.
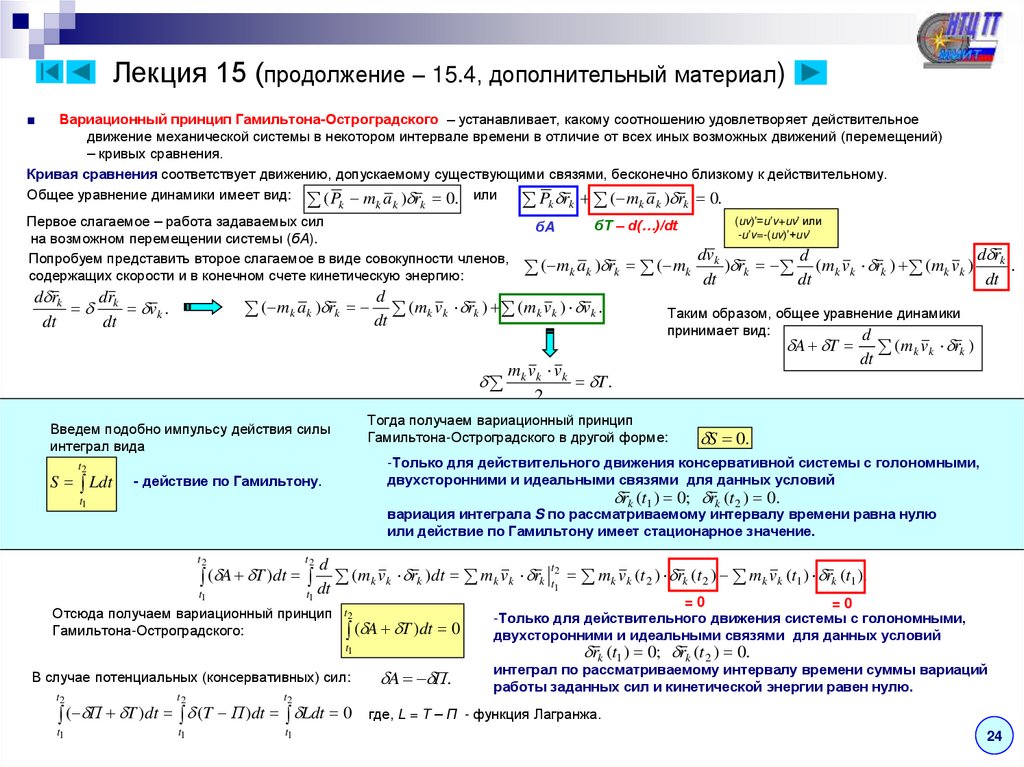
Лекция 15 (продолжение – 15.4, дополнительный материал)■
Вариационный принцип Гамильтона-Остроградского – устанавливает, какому соотношению удовлетворяет действительное
движение механической системы в некотором интервале времени в отличие от всех иных возможных движений (перемещений)
– кривых сравнения.
Кривая сравнения соответствует движению, допускаемому существующими связями, бесконечно близкому к действительному.
Общее уравнение динамики имеет вид: ( P m a ) r 0. или
P r ( m a ) r 0.
k
k
k
k
k
Первое слагаемое – работа задаваемых сил
на возможном перемещении системы (бA).
Попробуем представить второе слагаемое в виде совокупности членов,
содержащих скорости и в конечном счете кинетическую энергию:
d rk
dr
k vk .
dt
dt
( mk a k ) rk
бA
k
k
k
k
бT – d(…)/dt
( mk ak ) rk ( mk
d
(mk vk rk ) (mk vk ) vk .
dt
(uv)’=u’v+uv’ или
-u’v=-(uv)’+uv’
dvk
d rk
d
) rk (mk vk rk ) (mk vk )
.
dt
dt
dt
Таким образом, общее уравнение динамики
принимает вид:
d
A T
mk v k v k
T .
2
dt
(mk v k rk )
Потребуем, чтобы на границах интервала времени [t1,t2] действительная траектория совпадала с кривой сравнения: rk (t1 ) 0; rk (t 2 ) 0.
Тогда получаем вариационный принцип
Введем подобно импульсу действияДанное
силы требование эквивалентно отсутствию вариации перемещений в начале и в конце интервала [t ,t ],
Гамильтона-Остроградского в другой форме:
t=t2
1 2
S 0.
интеграл
вида
t=t1
например, при рассмотрении свободных колебаний можно задаться формой решения:
-Только для действительного движения консервативной системы с голономными,
t2
rk
x Aиsin
kt
x A sin kt двухсторонними
идеальными
связями для данных условий
по Гамильтону.
S Ldt - действие
rk интервала
(t1 ) 0; r[0,T/2],
0. T – период колебаний (2π/k).
Такая вариация координаты обращается в нуль на концах
где
k (t 2 )
вариация интеграла S по рассматриваемому интервалу времени равна нулю
Полученное общее уравнение динамики в дифференциальной
форме
справедливо
любой момент времени
рассматриваемого интервала.
или действие по
Гамильтону
имеетв стационарное
значение.
Умножим его на dt и проинтегрируем по всему интервалу:
t1
t2
t2
t1
t1
d
( A T )dt dt (mk vk rk )dt mk vk rk t1 mk vk (t 2 ) rk (t 2 ) mk vk (t1 ) rk (t1 ).
Отсюда получаем вариационный принцип
Гамильтона-Остроградского:
t2
t2
( A T )dt 0
t1
В случае потенциальных (консервативных) сил:
t2
t2
t2
t1
t1
t1
( П T )dt (T П )dt Ldt 0
A П.
=0
=0
-Только для действительного движения системы с голономными,
двухсторонними и идеальными связями для данных условий
rk (t1 ) 0; rk (t 2 ) 0.
интеграл по рассматриваемому интервалу времени суммы вариаций
работы заданных сил и кинетической энергии равен нулю.
где, L = T – П - функция Лагранжа.
24
27.
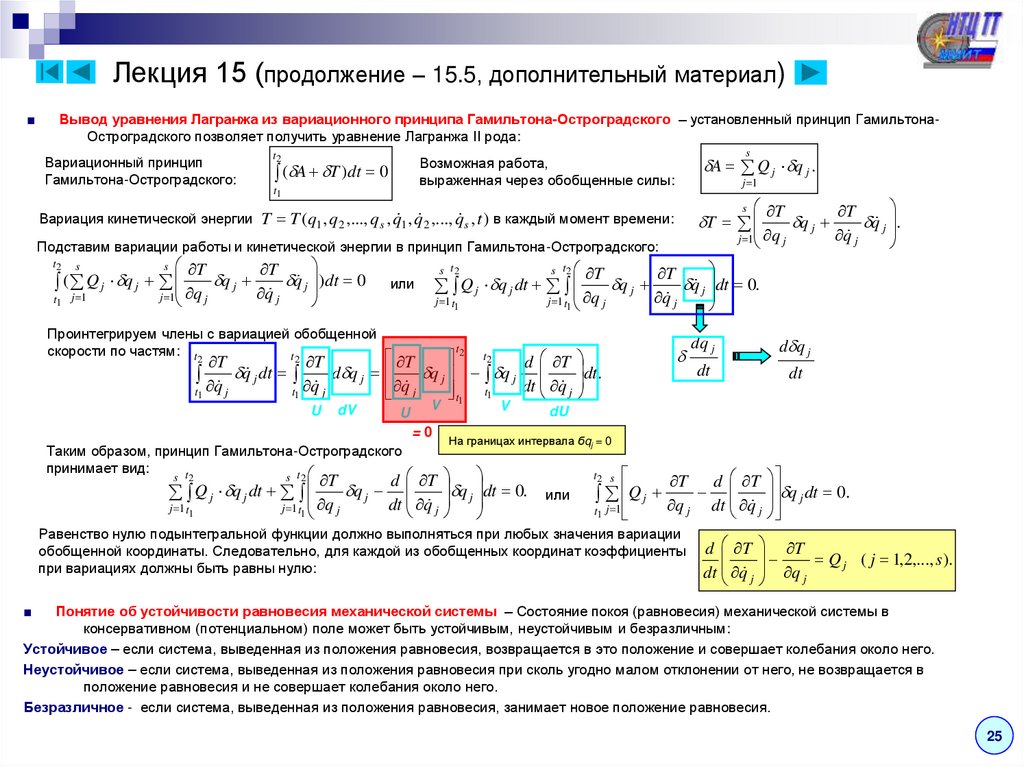
Лекция 15 (продолжение – 15.5, дополнительный материал)■
Вывод уравнения Лагранжа из вариационного принципа Гамильтона-Остроградского – установленный принцип ГамильтонаОстроградского позволяет получить уравнение Лагранжа II рода:
Вариационный принцип
Гамильтона-Остроградского:
t2
s
A Q j q j .
Возможная работа,
выраженная через обобщенные силы:
( A T )dt 0
t1
j 1
s T
Вариация кинетической энергии T T (q1 , q2 ,..., q s , q 1 , q 2 ,..., q s , t ) в каждый момент времени:
T
j 1 q j
Подставим вариации работы и кинетической энергии в принцип Гамильтона-Остроградского:
s
s T
T
(
Q
q
q
q
j
j
j
j ) dt 0
q
q
j 1
t1 j 1
j
j
t2
s t2
s t2 T
j 1 t1
j 1 t1 q j
Q j q j dt
или
Проинтегрируем члены с вариацией обобщенной
скорости по частям: t2
t2
q j
dV
t
U
V
=0
Таким образом, принцип Гамильтона-Остроградского
принимает вид:
t
t
s 2
s 2 T
Q j q j dt
j 1 t1
j 1 t1
q j
q j
t1
V
T
q j .
q j
T
q j dt 0.
q j
T
2 t2
T
T
d T
q q j dt q d q j q q j q j dt q dt.
t1
t1
t1
j
j
j
j
U
q j
dq j
d q j
dt
dt
dU
На границах интервала бqj = 0
d T
q j dt 0.
dt q j
t2 s
или
Q j
t1 j 1
T
d T
q j dt 0.
q j dt q j
Равенство нулю подынтегральной функции должно выполняться при любых значения вариации
обобщенной координаты. Следовательно, для каждой из обобщенных координат коэффициенты
при вариациях должны быть равны нулю:
d T T
Q j ( j 1,2,..., s ).
dt q j q j
■
Понятие об устойчивости равновесия механической системы – Состояние покоя (равновесия) механической системы в
консервативном (потенциальном) поле может быть устойчивым, неустойчивым и безразличным:
Устойчивое – если система, выведенная из положения равновесия, возвращается в это положение и совершает колебания около него.
Неустойчивое – если система, выведенная из положения равновесия при сколь угодно малом отклонении от него, не возвращается в
положение равновесия и не совершает колебания около него.
Безразличное - если система, выведенная из положения равновесия, занимает новое положение равновесия.
25
28.
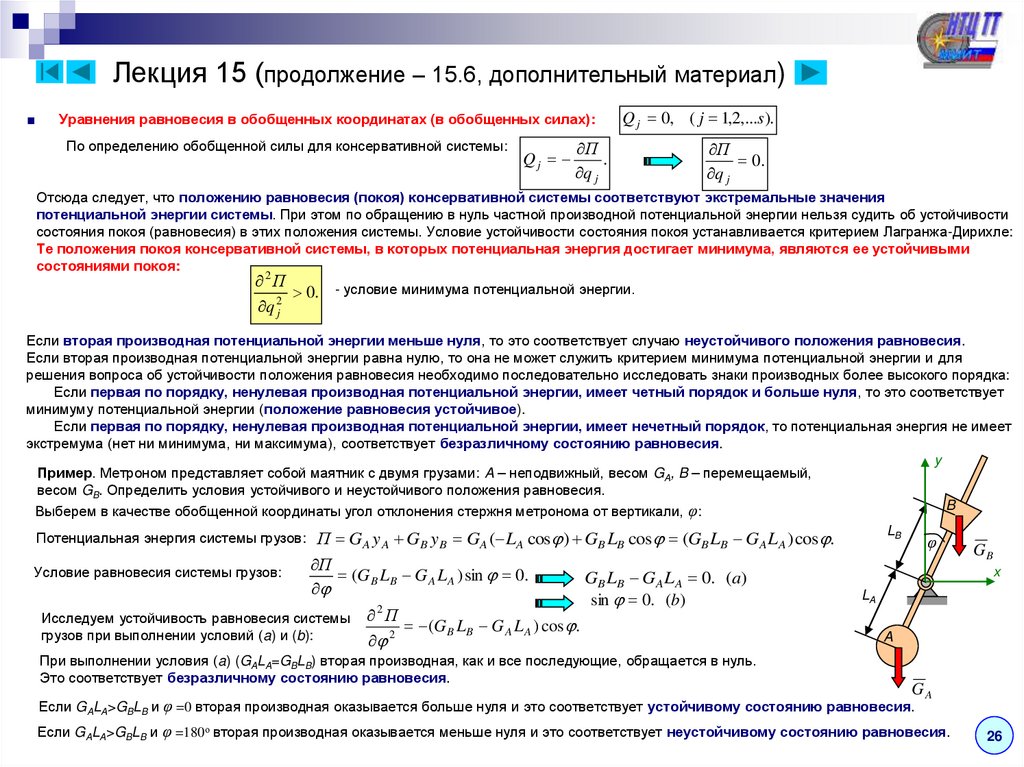
Лекция 15 (продолжение – 15.6, дополнительный материал)■
Уравнения равновесия в обобщенных координатах (в обобщенных силах):
По определению обобщенной силы для консервативной системы:
Qj
Q j 0, ( j 1,2,...s).
П
.
q j
П
0.
q j
Отсюда следует, что положению равновесия (покоя) консервативной системы соответствуют экстремальные значения
потенциальной энергии системы. При этом по обращению в нуль частной производной потенциальной энергии нельзя судить об устойчивости
состояния покоя (равновесия) в этих положения системы. Условие устойчивости состояния покоя устанавливается критерием Лагранжа-Дирихле:
Те положения покоя консервативной системы, в которых потенциальная энергия достигает минимума, являются ее устойчивыми
состояниями покоя:
2П
0. - условие минимума потенциальной энергии.
2
q j
Если вторая производная потенциальной энергии меньше нуля, то это соответствует случаю неустойчивого положения равновесия.
Если вторая производная потенциальной энергии равна нулю, то она не может служить критерием минимума потенциальной энергии и для
решения вопроса об устойчивости положения равновесия необходимо последовательно исследовать знаки производных более высокого порядка:
Если первая по порядку, ненулевая производная потенциальной энергии, имеет четный порядок и больше нуля, то это соответствует
минимуму потенциальной энергии (положение равновесия устойчивое).
Если первая по порядку, ненулевая производная потенциальной энергии, имеет нечетный порядок, то потенциальная энергия не имеет
экстремума (нет ни минимума, ни максимума), соответствует безразличному состоянию равновесия.
y
Пример. Метроном представляет собой маятник с двумя грузами: A – неподвижный, весом GA, B – перемещаемый,
весом GB. Определить условия устойчивого и неустойчивого положения равновесия.
B
Выберем в качестве обобщенной координаты угол отклонения стержня метронома от вертикали, φ:
П GA y A GB y B GA ( LA cos ) GB LB cos (GB LB GA LA ) cos .
П
Условие равновесия системы грузов:
(G B LB G A L A ) sin 0.
GB LB GA LA 0. (a)
sin 0. (b)
2
Исследуем устойчивость равновесия системы П
(G B LB G A L A ) cos .
грузов при выполнении условий (a) и (b):
2
LB
Потенциальная энергия системы грузов:
При выполнении условия (a) (GALA=GBLB) вторая производная, как и все последующие, обращается в нуль.
Это соответствует безразличному состоянию равновесия.
φ
GB
x
LA
A
GA
Если GALA>GBLB и φ =0 вторая производная оказывается больше нуля и это соответствует устойчивому состоянию равновесия.
Если GALA>GBLB и φ =180о вторая производная оказывается меньше нуля и это соответствует неустойчивому состоянию равновесия.
26
29. Лекция 16
■Малые колебания упругих систем с конечным числом степеней свободы – Рассмотрим упругую, например, двух опорную балку,
распределенную массу которой далее будем считать сосредоточенной в нескольких точках, расположенных по длине балки, например, с
некоторым равным шагом:
Считаем, что точечные массы соединяются жесткими шарнирными стержнями, а упругое (изгибное)
взаимодействие
отдельных частей исходной балки представим в виде пружин определенной жесткости,
m1
m3
m2
обеспечивающих возвращение системы в положение равновесия при ее отклонении.
Заметим, что такие связи не являются идеальными (совершают возможную работу)
R1
R2
R3
и должны быть заменены соответствующими реакциями:
При этом перемещение одной из точек вызывает перемещение других соответственно некоторой
гладкой кривой прогиба балки и значит определенную величину реакции каждой из пружин.
Реакции упругих связей линейно связаны с перемещениями точек и могут быть вычислены
как сумма реакций от единичных перемещений:
q =1
1
r21
r11
q2=1
r12
r22
r23
r13
R1=1
q11
q13
R1 r11q1 r12q2 ... c11q1 c12q2 ... c1i qi ;
R2 r21q1 r22 q 2 ... c21q1 c 22 q 2 ... c 2i qi ;
r32
.................................................................................;
Rn rn1q1 rn 2 q 2 ... c n1q1 cn 2 q 2 ... cni qi .
q3=1
r33
q22
q23
R C q
Здесь матрица C – симметричная матрица
жесткости, элементы которой cij – реакция по
направлению i-той упругой связи от единичного
смещения по направлению j-той связи.
q1 q11R1 q12 R2 ... d11R1 d12 R2 ... d1i Ri ;
В матричном виде: q D R
q 2 q 21R1 q 22 R2 ... d 21R1 d 22 R2 ... d 2i Ri ; Здесь матрица D – симметричная матрица
q32
податливости, элементы которой dij –
...................................................................................;
перемещение по направлению i-той упругой
q n q n1 R1 q n 2 R2 ... d n1 R1 d n 2 R2 ... d ni Ri ; связи от единичной силы, действующей по
R3=1
q33
направлению j-той связи.
d T T
Q j ( j 1,2,..., n).
dt q j q j
Уравнения Лагранжа II рода для
рассматриваемой системы:
Обобщенная сила:
A
A
A
A
A
Приращение работы на
A
q
q
...
q
...
q
q j .
1
2
j
n
вариациях перемещений:
q
q
q
q
q
1
Возможная
работа:
В матричном виде:
Аналогично можно представить обратную зависимость (перемещения точек от действия единичной силы):
q31
q21
R2=1
q12
r31
2
j
n
A
A 1
Aqj
q j
( cij q j qi ) q j ( cij qi ) q j .
q j
q j 2
j
Qj
Aqj
.
q j
Сумма полных работ
1
1
всех сил:
A Ri qi ( cij q j )qi .
Обобщенная
сила:
2
Q j cij qi .
2 i
j
27
30.
Лекция 16 (продолжение – 16.2)Кинетическая энергия. Для механической системы материальных точек кинетическая энергия вычисляется как сумма:
m1
m2
m3
rk
r
dq1 k dq 2 ...
dr (q , q ,...) q1
r
q 2
vk k 1 2
k q i .
dt
dt
i q i
Здесь скорость
k-той точки:
r
r
r r
Тогда кинетическая
1
1
1
1
T mk v k v k mk k q i k q j mk k k q i q j . mij q i q j .
энергия:
2 k
2 k
i
qi
j
q j
2 i
qi q j
j k
2 i
Подставим найденные выражения
в уравнение Лагранжа:
В матричном виде:
Уравнение колебаний
в матричном виде может быть
представлено и так:
T
0;
qi
T
j
j
или
j
j
m11 m12
M m21 m22
m31 m32
M q C q 0.
M 1 C q 0.
q
Сравните с каноническим уравнением
свободных колебаний материальной точки:
Специальным выбором обобщенных координат можно добиться диагональности матрицы масс:
q1=1
r21
r11
r12
q2=1
r22
r13 r23
r31
r32
q3=1
r33
mij mk
k
rk rk
.
qi q j
mij q j cij q j 0. - общая форма уравнений малых колебаний
При получении уравнений в общей
форме матрица масс M и матрица
жесткости C являются полностью
заполненными, например:
Тогда кинетическая
энергия:
1 T
q M q
2
d T
mij q j .
dt q i j
T
1
mij q i q j . mij q j .
q i q i 2 i j
j
mij q j cij q j .
1
mk v k v k
2
В матричном виде:
j
= mij
Здесь матрица M – симметричная матрица масс, элементы которой mij – мера (сила) инерции,
соответствующая направлению i-той упругой связи от единичного ускорения по направлению j-той связи:
Вычислим необходимые производные
кинетической энергии, участвующие в
уравнении Лагранжа:
T
1
mk q k2
2 k
m1
Здесь матрица масс M
становится диагональной: M 0
0
T
0
m2
0
0
0
m3
m13
c11 c12
m23 ; C c21 c22
c31 c32
m33
c13
c23 .
c33
x k 2 x 0.
rk rk
0, при i j.
qi q j
и система дифференциальных
уравнений распадается
mi q i cij q j 0
относительно ускорений:
j
- прямая форма уравнений малых колебаний
Физический смысл прямой формы – система расчленяется на отдельные материальные
точки, на каждую из которых действуют упругие силы безмассового каркаса.
28
31.
Лекция 16 (продолжение – 16.3)Обратная форма – получается формально из обратных соотношений обобщенных координат:
Здесь силу Rj можно рассматривать как силу инерции,
приложенной к связи:
Тогда:
R j m j q j .
qi d ij R j ,
В матричном виде:
j
qi d ij ( m j q j )
или
j
0.
q D M q
qi d ij m j q j 0
j
Здесь матрица масс M сразу становится диагональной (массы расчленены), а матрица податливости D по-прежнему остается полностью
заполненной (упругий безмассовый каркас соединяет точечные массы). Физический смысл – безмассовый каркас нагружен силами
инерции со стороны материальных точек.
Уравнение колебаний в обратной форме в матричном виде
M 1 D 1 q 0.
q
может быть представлено и так:
Решение уравнений малых колебаний – получим формально с использованием матричной записи по
аналогии с решением дифференциального уравнения свободных колебаний материальной точки:
Будем искать решение в виде:
q φ sin( t ).
q φ cos( t ).
2 M φ C φ 0. - для любого момента времени
2 M φ sin( t ) C φ sin( t ) 0.
M q C q 0.
2 φ sin( t ).
q
Это уравнение представляет собой типичную задачу определения собственных значений (и собственных векторов), которое для
произвольных значений амплитуд сводится к вычислению определителя следующего (“векового”) уравнения:
2
Для уравнений малых колебаний в прямой форме матрица
масс диагональная и вековое уравнение может быть записано,
например, для i = 3 более подробно:
c11 2 m1
c 21
c31
c12
c 22 2 m2
c32
c13
c 23
0.
2
c33 m3
C M 0.
Специальные методы и стандартные программы, составленные на их основе, решают данную задачу и в результате получается набор
значений собственных частот ( ωi ) и соответствующих им собственных векторов ( φi ). Последние представляют собой формы
собственных колебаний для каждой из собственных частот:
φ1
φ2
φ3
φ11
φ21
φ12
φ22
(ω1)
φ31
φ32
(ω2)
φ33
φ13
φ23
(ω3)
11
12
13
φ1 21 , φ 2 22 , φ 3 23 .
31
32
33
Формы собственных колебаний
ортогональны между собой, что
означает равенство нулю их
скалярных произведений:
φ1 φ 2 0;
φ 2 φ 3 0;
φ 3 φ 1 0.
Замечание. При использовании стандартных программ уравнения колебаний приводятся к
виду:
M 1 D 1 q S q.
M 1 C q S q или q
q
Собственные числа и собственные вектора вычисляются для матрицы
S .
29
32.
Лекция 16 (продолжение – 16.4)■
Главные координаты – С целью приведения матрицы масс и матрицы жесткости к диагональному виду можно использовать
собственные формы колебаний в качестве новых обобщенных координат. Такие координаты называются главными в силу их
ортогональности. В этом случае система дифференциальных уравнений распадается на отдельные совершенно независимые
уравнения.
Выразим старые координаты qi как линейную комбинацию ортогональных форм с новыми координатами (главными координатами):
φ1
φ2
φ3
φ11
φ21 φ31
φ12
φ22
q1 11q~1 12q~2 ... 1i q~i ;
q 2 21q~1 22 q~2 ... 2i q~i ;
(ω1)
φ32
Здесь матрица Ф – матрица собственных форм
колебаний, элементы которой
...................................................;
φij – элементы собственных
11 12
векторов (ординаты эпюр
q n n1q~1 n 2 q~2 ... ni q~i ;
Φ 21 22
прогибов):
31 32
Обобщенные скорости выражаются через ортогональные
формы и главные координаты аналогично.
~
q Φ q
В матричном виде:
(ω2)
φ33
φ13
φ23
Тогда кинетическая энергия
системы в матричном виде:
(ω3)
T
1 T
1 ~ T
~ ~
Φ T M Φ q~ 1 q~ T M
q M q q
q
2
2
2
Точно также потенциальная энергия
системы:
1
1
1
1 ~T
Φ T C Φ q~ 1 q~ T C~ q~.
П A21 Ri qi ( cij q j )qi q T C q q
2
2
2
2
2
~ q~
~ ~
m
kk k ckk q 0.
Уравнения движения в главных координатах имеют вид:
Подстановка общего решения
■
~
q Φ q
В матричном виде:
~ φ sin( t ). приводит к равенству
q
13
23 .
33
~
Здесь матрица масс
M ΦT M Φ
– обобщенная матрица
масс, которая становится диагональной
в силу использованного ортогонального
преобразования координат.
~
Здесь матрица жесткости
C
ΦT C Φ
– обобщенная матрица
жесткости, которая так же становится диагональной
по той же причине.
~ c~ 0. , откуда:
k2 m
k
kk
kk
c~kk
~ .
m
kk
Свободные колебания с учетом сопротивления среды – Сила вязкого сопротивления движению пропорциональна скорости:
Rci i vi q .
Обобщенная сила с учетом
силы сопротивления:
Уравнения движения в общей форме
с учетом силы сопротивления:
A Rci qi Ri qi
Qi
qi
qi
mij q j i q i cij q j 0.
j
j
В матричном виде:
i q i qi cij q j qi
j
qi
i q i cij q j .
j
M q F q C q 0.
Здесь матрица F – диагональная матрица демпфирования
30
33.
Лекция 16 (продолжение – 16.5 , дополнительный материал)■
Примеры вычисления собственных частот для различных схем дискретизации массы – С целью исследования влияния схемы
дискретизации массы рассмотрим для одной и той же балки длиной L = 3а, a = 1 м, погонный вес G1 = 21 кгс/м (206 Н/м), момент
инерции поперечного сечения I = 1840 см4 = 1.84 10-5 м4, модуль упругости E = 2 106 кгс/см2, несколько схем:
1. С одной точечной массой – балка заменяется одной, расположенной посредине, сосредоточенной массой, равной массе балки.
1 1 q 0.
Воспользуемся обратной формой:
M D
q
Матрицы имеют первый порядок и
представляют собой один всего лишь элемент:
m =M
3а
1
2
P=1
1
2
m11 M
G1
206
L
3 63.
g
9.81
Элемент матрицы податливости определим как перемещение от единичной силы с помощью интеграла
Мора, используя для его вычисления правило Верещагина:
M 1 M 1ds
9
9
1 3a 3a a 1
i yi 2
1.56 10 7
6
4
5
EI
2 4 2 2 EI 16 EI 16 2 10 9.81 10 1.84 10
Произведение элементов матриц жесткости и податливости:
m11d11 63 1.56 10 7 9.82 10 6
d11
a M
1
3a
2
4
Точное решение
Собственная частота
Обратная
1
5
1
величина: (m11d11 ) 1.02 10 колебаний (рад/c): ( m11d11 ) 319 (низшая частота колебаний): ˆ 1.343
EI
454.6
0.5Ma 3
в точке
20с.62
что
Ошибка
аппроксимации
составляет
29.8%.
ошибка связана
тем,
Собственные
масса балки частоты
сосредотачивается
9.624Такая
1436максимального
11
5 большая
5 вся
Обратная
λ–
10
. балки
ωсредней
1 точке,
две части
M логично
D 1 разбить
10части:
. Собственные
прогиба.
Вполне
балку
на
три
средняя
часть
половина
массы
колебаний
прикладывается
(рад/c):
в
– две
.
числа:
матрица:
1.375
370
.
8
9
.
624
11
2
одна
точечная масса, равная
четверти массы прикладываются в опорных точках и тем самым не участвуют в колебаниях. Таким образом, остается
Ошибка
аппроксимации
половине
массы балки: по нижней частоте 18.4%. Вновь, если принять массу каждого из двух точечных масс, равной одной трети от массы балки
G
M считая,
206
при той же геометрии расположения,
приходится на опоры,
то ошибка по нижней частоте
снижается до 0.101%.
7
m11
1 L что оставшаяся
3 31.5.третьmмассы
4.91 10 6
(m11d11 ) 1 451.3
11d
11 31.5 1.56 10
Это не означает, что такая высокая
получается
для высших
частот.
2 точность
2g
2 9.81
Для получения
достаточной
точности
по этим частотам
приходится
увеличивать
степень
дискретизации (количество точечных масс).
Ошибка
аппроксимации
составляет
теперь всего
0.73%. И
это очень хороший
результат.
m =0.5M
m =0.5M
2. С двумя точечными массами – балка заменяется двумя, расположенными по третям длины балки,
сосредоточенными массами, равными половине массы балки.
M
3а
Матрицы имеют второй порядок:
m m
31.5
11
22
2
2
M 1M 1ds
12
1 2a 2 2a 1 2a 2 2a 1
7
d11 d 22
i yi
a
2a
1.23 10
3
EI
3 3 EI 27 EI
2 3 3 3 2 3
M M ds 1 2a 2 a 1 2a a 2a 2a a a
a 2a 1
21
d12 d 21 1 2 2
a
2
1.08 10 7 1
2
EI
3 3 EI 54 EI
3
2 3 3 3 6 3 3 3 3 3 3
3
.
88
3
.
394
Матрица
1.23 1.08 7
Произведение матриц
M D
10 6.
10 .
податливости: D
жесткости и податливости:
3.394 3.88
1.08 1.23
1
3
P=1
M1
2a
3
M2
a
3
a
3
P=1
2a
3
2
3
31
34. Лекция 17
■Элементарная теория удара.
Удар – явление, при котором за ничтожно малый промежуток времени скорости точек изменяются на конечную величину.
Ударные силы - силы взаимодействия при соударении тел (удар молота, столкновения экипажей).
Время удара – очень малый промежуток времени, в течении которого происходит удар (контакт соударяющихся поверхностей). В силу этого
ударные силы могут достигать очень больших значений, при которых возможно изменение скоростей точек на конечную величину. Соотношение
между конечным изменением скорости и величиной ударной силы определяется теоремой об изменении количества движения:
m(v1 v0 ) S
Здесь
- основное уравнение удара.
S F dt
- импульс ударной силы.
Импульс ударной силы является конечной величиной не смотря на то, что интегрирование должно выполняться практически на бесконечно малом
интервале времени (времени удара). Точный закон изменения ударной силы в течении времени удара, как впрочем и само время удара, как
правило, остаются неизвестным и интеграл заменяется произведением некоторого среднего значения силы на время удара:
В силу того, что ударные силы много больше по величине других сил (неударных), последними пренебрегают. В силу малости
времени удара, возникающие перемещения точек во время удара (vср∙
S F dt Fср .
0
При рассмотрении механической системы во время удара из всех теорем динамики используется лишь теорема об изменении количества
движения системы и для вращающейся системы ее аналог – теорема об изменении момента количества движения системы:
Q1 Q0 S e .
В проекции, например, на ось x:
KO1 KO0 M O (S e ).
Q1x Q0 x S xe .
В проекции, например, на ось z (относительно оси z):
K1z K0 z mz (S e ).
Теорема об изменении кинетической энергии использоваться практически не может, поскольку перемещениями во время удара пренебрегается и
работа ударных сил не может быть вычислена.
■
Удар шара о неподвижную поверхность – Рассматривается поступательное движение шара массой m со скоростью
v перпендикулярно неподвижной массивной поверхности (преграде) – прямой удар. Например, шар падает с высоты
h0 и ударяется о горизонтальную поверхность со скоростью v.
Различают две стадии (фазы) удара:
1.
Переход кинетической энергии движения в потенциальную энергию деформации. При этом скорость падает до
нуля, часть энергии расходуется на нагрев тела.
2.
Переход потенциальной энергии в кинетическую при восстановлении первоначальной формы тела за счет упругих
сил. Из-за наличия остаточных (пластических) деформаций и нагрева тела кинетическая энергия полностью не
восстанавливается и скорость u отделения шара от поверхности будет меньше, чем скорость до удара (u < v).
Отношение модуля скорости шара в конце удара к модулю его скорости
в начале удара – коэффициент восстановления при ударе :
k
u
v
.
Коэффициент восстановления
можно определить опытным путем:
h0
h1
u
v
k
2 gh1
2 gh0
h1
h0
.
32
35.
Лекция 17 (продолжение – 17.2)Коэффициент восстановления может изменяться от 0 до 1. При k = 0 – абсолютно неупругий удар (шар не отскакивает от преграды), при k =1
– абсолютно упругий удар (нет потери энергии при деформации, нет нагрева).
Реальные материалы всегда имеют такие потери энергии и коэффициент восстановления даже для достаточно упругих материалов лишь
приближается в той или иной степени к единице. Кроме того коэффициент восстановления зависит от скорости, при которой
происходит удар (k = k(v)). Поэтому сравнение значений коэффициентов восстановления должно выполняться при одной и той же
скорости. Например, при скорости v = 3 м/с:
стекло – k = 0.94; кость – k = 0.89; сталь – k = 0.56;
дерево – k = 0.50.
Можно показать, что коэффициент восстановления определяет так же соотношение между импульсами ударной силы в двух фазах:
Основное уравнение удара для первой фазы: 0 mv N dt S . для второй фазы: mu 0 N dt S .
1
1
2
2
τ2
τ1
Отсюда, импульс второй фазы и суммарный импульс ударной силы в двух фазах зависят от коэффициента восстановления:
S 2 kS1.
k
u
v
S2
.
S1
S S1 S 2 S1 kS1 (1 k )S1 (1 k )mv.
Рассмотрим теперь поступательное движение шара массой m со скоростью v , составляющей некоторый угол (угол падения) к нормали
неподвижной массивной поверхности (преграде) – косой удар.
n
Запишем основное уравнение удара: m(u v ) S
Спроецируем на нормаль и касательную к поверхности:
u
β
v
m(u n vn ) m(u cos v cos ) S ;
m(u τ v τ ) m(u sin v sin ) 0.
u n u cos v sin cos tg
Коэффициент восстановления: k
.
vn
v cos sin v cos tg
u
v sin
.
sin
Поскольку коэффициент восстановления k < 1, то угол отражения больше угла падения. Угол отражения равен
углу падения только в случае абсолютно упругого удара (k = 1).
Модуль скорости после удара:
u u τ2 un2 vτ2 k 2 vn2 (v sin ) 2 k 2 (v cos ) 2 v sin 2 k 2 cos 2 .
При очень больших углах падения, близких к прямому углу, скорость после удара приближается к скорости до удара (u v).
Импульс ударной силы:
S mu cos mv cos mv( sin 2 k 2 cos 2 cos cos ).
При очень больших углах падения, близких к прямому углу, импульс ударной силы приближается к нулю (S 0). На этих свойствах,
связанных с большими углами падения, основывается эффект запуска “блинчиков” метанием плоских камней (голышей) под острым углом к
водной поверхности.
33
36.
Лекция 17 (продолжение – 17.3)■
Гидравлический удар в трубах – при резком закрывании задвижки в магистральных трубопроводах может произойти ударное воздействие
на элемент запирающего устройства и саму трубу (резко возрастает давление в системе). Рассмотрим трубу длиной L, по которой
движется жидкость под некоторым давлением.
Пусть в некоторый момент поток резко перекрывается опусканием задвижки.
Запишем теорему об изменении количества движения для объема жидкости, находящейся под давлением
в трубе:
e
v0
RA
Q1 Q0 S S (G ) S ( RA ) S ( RB ).
RB
Спроецируем уравнение на ось x, совпадающей с осью трубы:
Q1x Q0 x ( R A RB )dt ( p A p B ) Adt pAdt.
L
t
t
t
Здесь p – разность давлений, A – площадь поперечного сечения потока, t – время, за которое ударная
G
волна пройдет расстояние L.
Характер изменения ударной силы (разности давления) неизвестен. Ударный импульс заменим произведением средней разности давлений
на площадь поперечного сечения потока и время импульса:
pAdt A pср t.
t
Q0 x Mv0 ALv0 ; Q1x 0.
L
Подставим эти выражения в уравнение ALv A p t.
cv 0 p ср .
v0 p ср .
0
ср
разности проекций количеств движения:
t
pср cv0
С использованием коэффициента объемного веса получаем формулу Жуковского:
.
g
Таким образом, повышение давления не зависит от длины трубы
Количество движения жидкости в начальный и конечный моменты:
и пропорционально скорости течения жидкости.
Скорость распространения ударной волны в жидкости:
c
E
2.07 10 4 10 4 9.81
1425 м / с
1000
Поскольку при гидравлическом ударе происходит также деформация трубы,
влияющая на изменение плотности жидкости Жуковским была
получена формула для скорости распространения волны с учетом этого: c
Здесь с – скорость
распространения
ударной волны.
Знак минус означает, что
RB > RA и его можно далее
опустить.
Здесь E – модуль упругости воды
2.07 104 кгс/см2.
E
Ed
.
1
Следовательно, гидравлический удар зависит от скорости
E м
и будет сильнее в трубах малого диаметра и трубах, изготовленных
из материалов с более высоким модулем упругости (например, модуль упругости стали
почти в два раз больше модуля упругости меди).
Здесь Eм – модуль материала трубы,
d – диаметр трубы, б – толщина стенки трубы.
34
37.
Лекция 17 (продолжение – 17.4 , дополнительный материал)■
Прямой центральный удар двух тел – Рассмотрим соударение двух движущихся тел со скоростями v1 и v2 (v1 > v2) массами M1 и M2.
M1
v1
M2
v2
1.
В первой фазе удара ударная сила взаимодействия возрастает от нуля до максимального значения
(деформация нарастает до момента выравнивания скоростей). Проекция на горизонтальную ось теоремы
об изменении количества движения для всей системы дает:
(M1 M 2 )u M1v1 M 2 v2 0.
u
M 1v1 M 2 v2
.
M1 M 2
Для определения величины механического взаимодействия (импульса) составим такое же уравнение для одного тела, например, 1:
Замечания:
M 1v1 M 2 v2
M 1v1 M 2 v2 M 1v1 M 2 v1
I
M11после
. тела 2 до удара
S1I M 1 (u упругого
v1 ) Mудара
v1 тела
M 1равенства
(u v1 ) Sмасс
1. В частном случае
скорость
удара будет равна скорости
1
1 . (M1 = M2) и абсолютно
M(k =1)
M
M
M
1то после
2
1
2
телом 1 тело 2 получит
и наоборот. Т.е. если тело 2, например, как при игре в биллиард, покоилось,
удара
скорость
тела 1, а тело 1
M 2 v2 M 2 v1
M 1M 2
остановится.
I
S1 M 1 их в закон сохранения
(v2 vдвижения:
M1v1 M 2 v2 M1u1 M 2u2 .
1 ).
2. Проверить полученные соотношения можно подставив
количества
M1 M 2 M1 M 2
3. Отношения модулей относительных скоростей до и после удара определяют коэффициент восстановления (или наоборот).
Заметим,
что разность
скоростей
представляет
собойu1относительную
(скорость
сближения)
поскольку
v2 <u2v: 1, то ударный импульс,
Для
этого подставим
вычтем
выражение
для скорости
(в синей рамке) скорость
из аналогичного
ему
выражениеи для
скорости
u 2первой
u1приложенный
Определим
модуль
ударного
импульса,
приложенного
к каждому телу движению
Используем
выражение,
полученное
для импульса
фазы:
приложенный
к телу
1, будет
направлен
в сторону, противоположную
этих тел.
Аналогично
можно определить
импульс,
k.
u
u
u
(
1
k
)
kv
(
u
(
1
k
)
kv
)
k
(
v
v
).
2
1
2
1
1
2
заквесь
упругогои удара
две фазы):
телупериод
2, но быстрее
проще(за
воспользоваться
законом действия
и противодействия:
v v
I
I
1
2
M 1M 2
S1 S 2 .
I
II
I
I
I
S
S
(
1
k
)
(
v
v
).
S
S
S
S
S
kS
(
1
k
)
S
.
2
1 значения до нуля (упругие
2
1 деформации
2
1
1
1ударная
1
1 взаимодействия
1
Во второй
фазе
удара
сила
уменьшается от максимального
M1 M 2
2.
восстанавливают полностью и частично форму тел и потенциальная энергия деформации переходит в кинетическую до отделения тел друг
от друга). Проекция на горизонтальную ось теоремы об изменении количества движения для одного из тел, например, 1, дает :
M 1 (u1 u ) S1II .
С использованием коэффициента восстановления можно записать:
M 1 (u1 u ) kS1I .
u1 u
k.
u1 k u v1 u u(1 k ) kv1.
u v1
Подставим выражение для скорости u:
M v M 2 v2 kM1v1 kM 2 v2 M 1kv1 M 2 kv1
M v M 2 v2
u1 1 1
.
u1 1 1
(1 k ) kv1 .
M1 M 2
M1 M 2
M v M 2 v2 kM 2 (v2 v1 ) M 2 v1 M 2 v1
M v M 2 v2 kM 2 (v2 v1 )
(k 1) M 2 (v2 v1 )
u1 1 1
.
u1 1 1
.
u1 v1
.
M1 M 2
M1 M 2
M1 M 2
Поделим это уравнение на уравнение в красной рамке:
Заметим, что разность скоростей (v2 - v1) опять представляет собой относительную
скорость слагаемых
(скорость сближения) и поскольку v2 < v1,
Добавили два одинаковых
с противоположными
знаками дляскорости.
получения Аналогично можно определить
то скорость тела 1 уменьшается и это уменьшение пропорционально массе
тела 2 и относительной
еще одной разности скоростей.
скорость тела 2:
(k 1) M 1 (v2 v1 )
u 2 v2
. Здесь скорость тела 2 увеличивается и это увеличение
35
пропорционально массе тела 1.
M M
1
2
38.
Об автореАвтор благодарит вас, уважаемые студенты, за то, что вы
воспользовались этим материалом для подготовки к экзаменам
по рассмотренным разделам теоретической механики.
Если представленный материал поможет
молодым преподавателям теоретической механики
подготовиться к чтению лекций или
послужит основой для разработки собственного курса лекций,
то автор будет только рад. Успеха всем!
Список трудов
36