





 electronics
electronicsSimilar presentations:










Инженерные методы синтеза систем автоматического регулирования в технологических установках
1. Автоматизация технологических процессов
Модуль 2. Лекция 3. Инженерные методысинтеза систем автоматического
регулирования в технологических установках
2. План
1.2.
3.
4.
Контур регулирования
Возмущающие воздействия и выбор
способа управления технологическими
установками
Выбор закона регулирования
Формирование структуры систем
регулирования
18.12.2019
АТП Кафедра АСУП БГАТУ
2
3. Регулирующий контур представляет собой совокупность управляемого объекта и измерительно-управляющей аппаратуры – регулятора
18.12.2019АТП Кафедра АСУП БГАТУ
3
4.
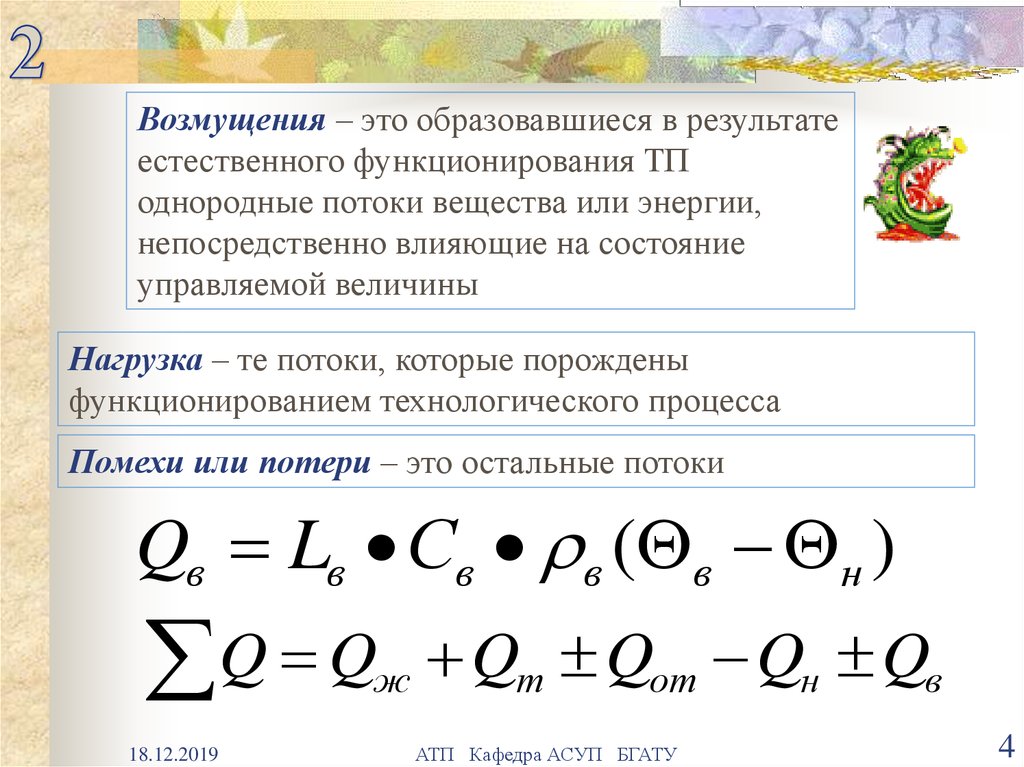
Возмущения – это образовавшиеся в результатеестественного функционирования ТП
однородные потоки вещества или энергии,
непосредственно влияющие на состояние
управляемой величины
Нагрузка – те потоки, которые порождены
функционированием технологического процесса
Помехи или потери – это остальные потоки
Qв Lв Св в ( в н )
Q Q
ж
18.12.2019
Qт Qот Qн Qв
АТП Кафедра АСУП БГАТУ
4
5.
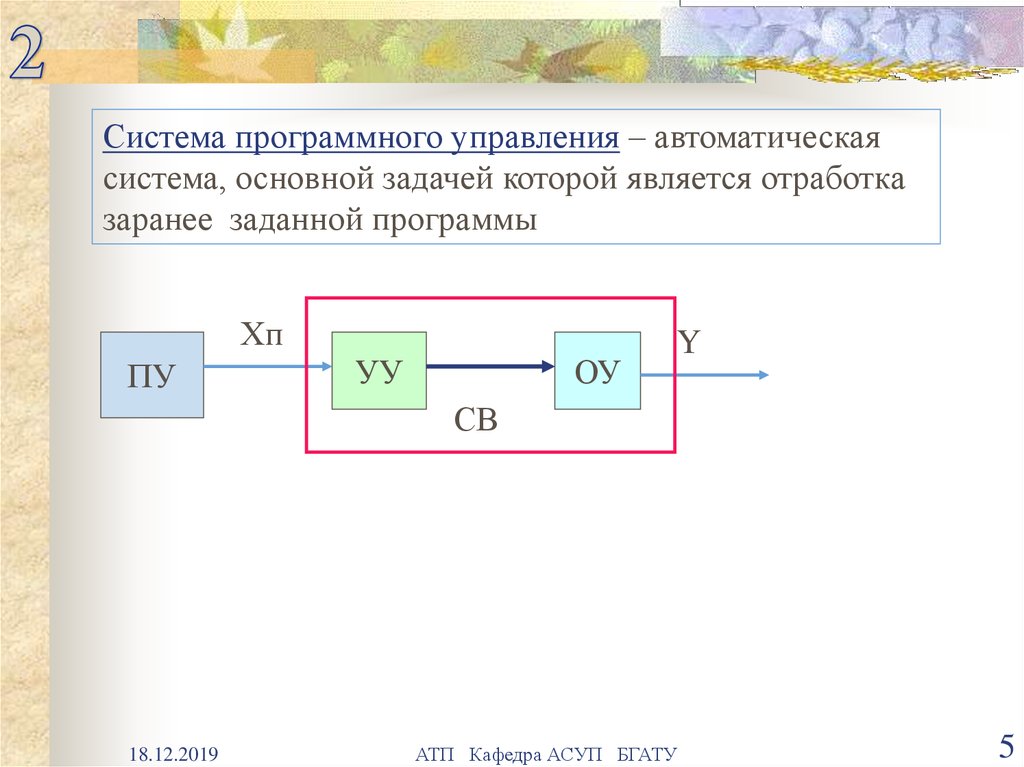
Система программного управления – автоматическаясистема, основной задачей которой является отработка
заранее заданной программы
Хп
ПУ
УУ
ОУ
Y
СВ
18.12.2019
АТП Кафедра АСУП БГАТУ
5
6.
Математическое _ ожиданиеm fвСлучайные
(t ) M [ fв
(t ) fв(t ) p1функции
( fв, t )df
(стохастические)
времени fв(t)
nfв1
fв2
1
fв (t )
m
fв
(
t
)
fв
i
i
Одномерная
плотность
_
вероятност
и
N _
1
mfв
p1 ( fв1, t1 )dx p[ fв1, fв(t1 ) fв1 dfв1]
F1 ( fв1, t1 ) p[ fв(t1 ) fв1]
t1
18.12.2019
t2
АТП Кафедра АСУП БГАТУ
t
6
7.
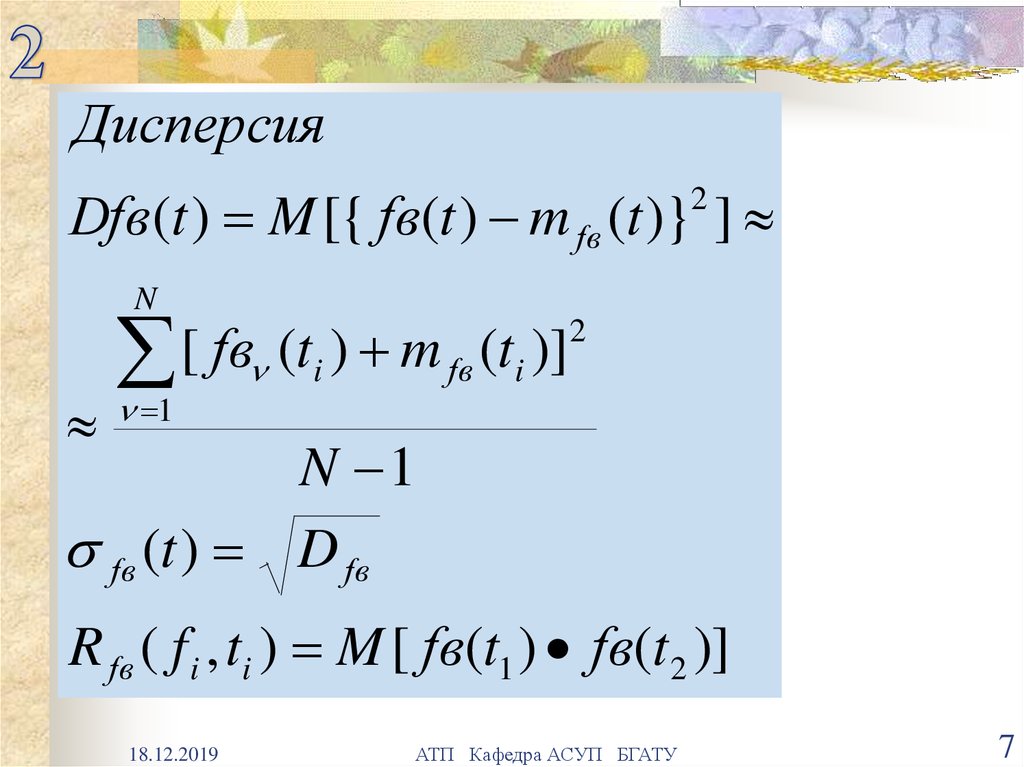
ДисперсияDfв (t ) M [{ fв(t ) m fв (t )} ]
2
N
[ fв (t ) m
1
i
fв
(ti )]
2
N 1
fв (t ) D fв
R fв ( f i , ti ) M [ fв(t1 ) fв(t 2 )]
18.12.2019
АТП Кафедра АСУП БГАТУ
7
8.
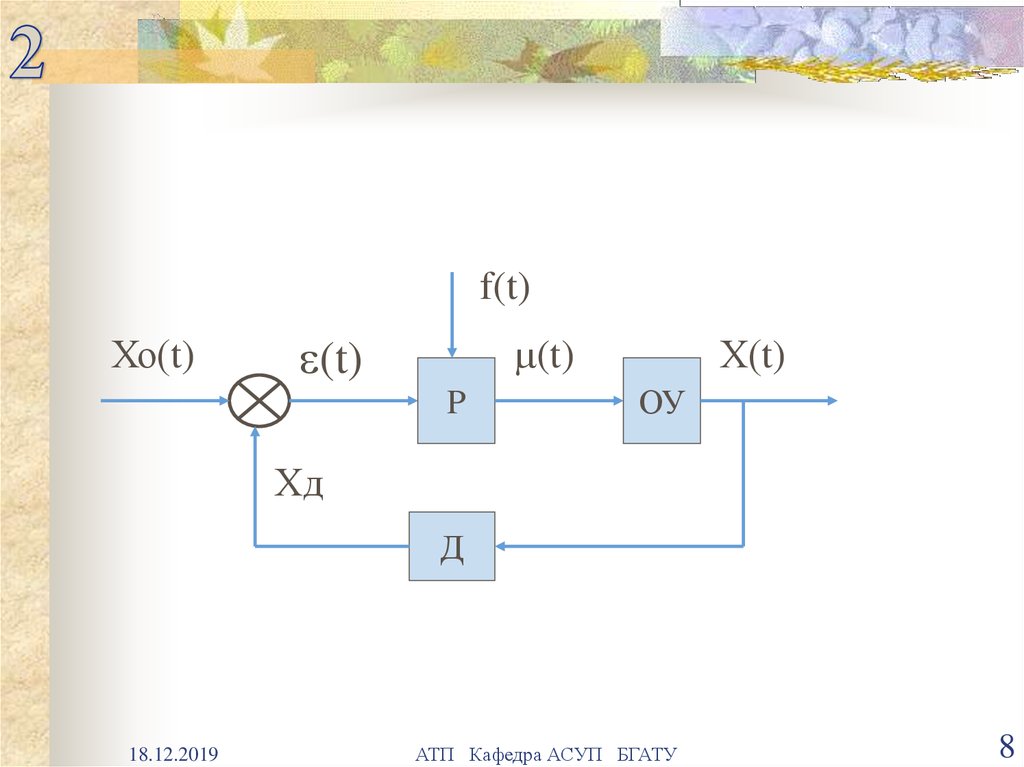
f(t)Хо(t)
(t)
(t)
P
Х(t)
ОУ
Хд
Д
18.12.2019
АТП Кафедра АСУП БГАТУ
8
9. 3. Определение принципов и законов регулирования
И(при< 0.1)
И(при
< 0.15)
Основное условие выбора –
T 720с
соотношение запаздывания регулирующего
30с
воздействия
tрег
240с к постоянной времени ОУ:
П(при
< 0.2)
П(при
< 0.1)
И(при
0.2
И(при
T
720
п 1
24
30
t рег
240
с0. 2 1
8
30
_ И
закона
Т ро оу
ро_
Для
T
1
п
k
1
t рег
с
1
1 19
0.05
18.12.2019
< 0.05)
< 0.2)
ПИ
ПИД
СБ
Рис.
Диаграмма А.Я.Лернера для выбора регуляторов непрерывного
действия
АТП Кафедра АСУП БГАТУ
9
10. Структура САР :
18.12.2019АТП Кафедра АСУП БГАТУ
10
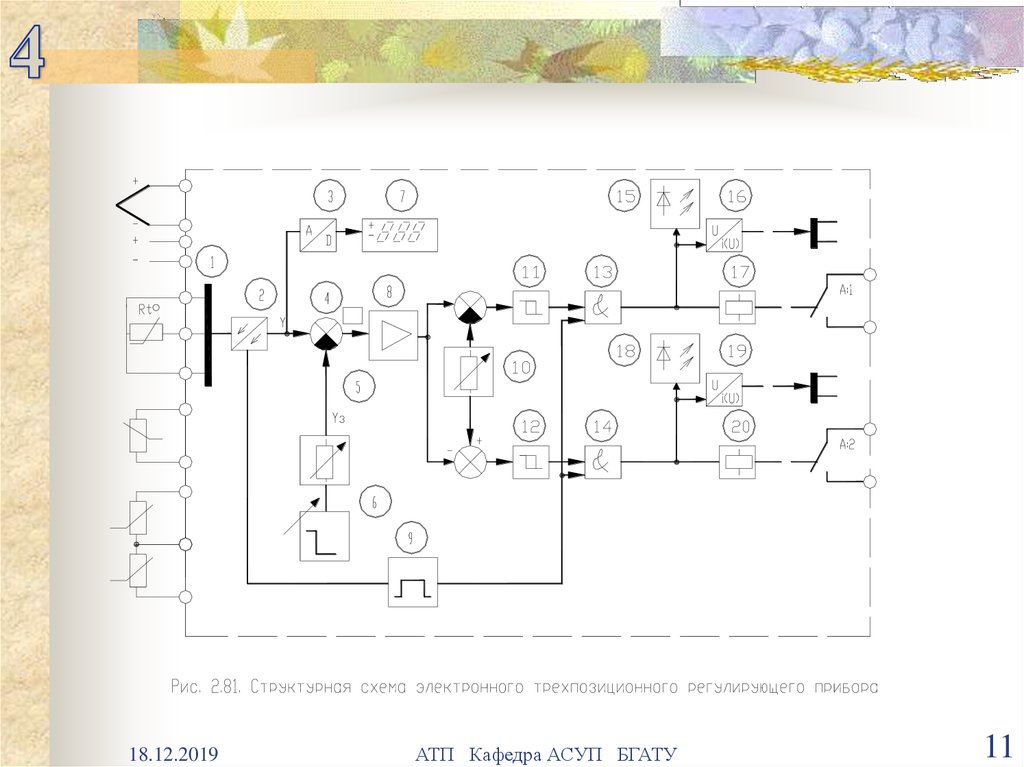
11.
18.12.2019АТП Кафедра АСУП БГАТУ
11
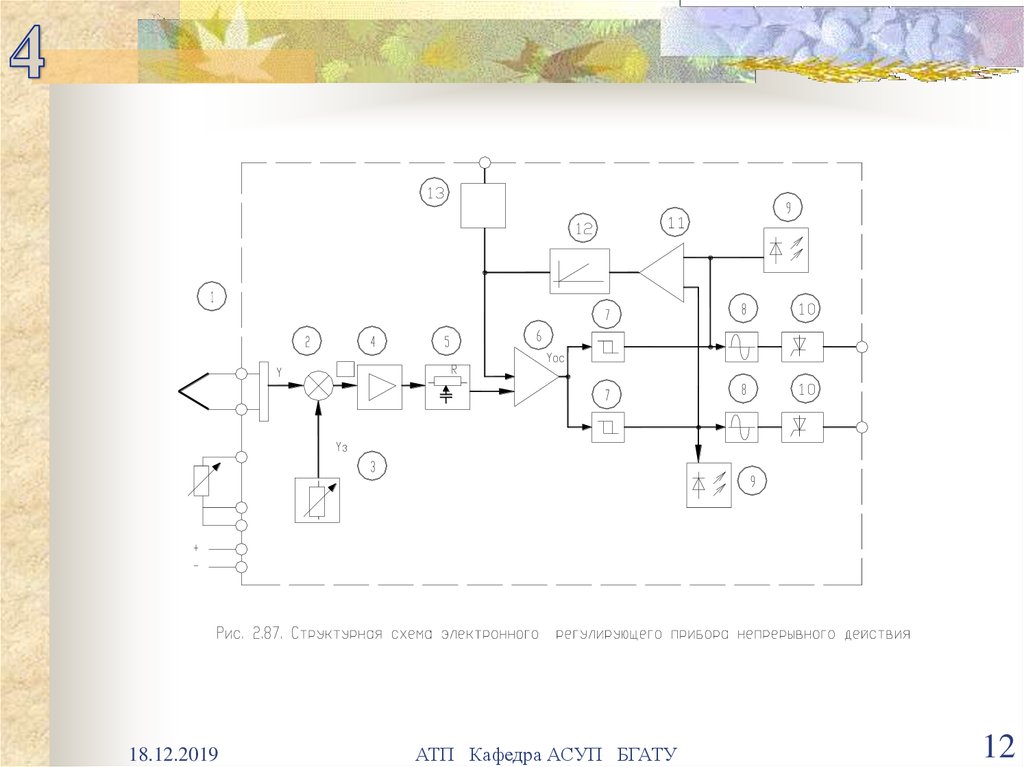
12.
18.12.2019АТП Кафедра АСУП БГАТУ
12