










 electronics
electronicsSimilar presentations:









")
Синтез систем автоматического управления
1. Тема: Синтез САУ
2. ПЛАН
1. Вводные замечания2. Синтез САУ по ЛАФЧХ
3. Построение низкочастотного участка
ЛАФЧХ
4. Построение среднечастотного участка
ЛАФЧХ
5. Построение высокочастотного участка
ЛАФЧХ
6. Синтез последовательных корректирующих
устройств
3. 1. Вводные замечания
Синтез – целенаправленный выбор структуры САУ и расчет еепараметров таким образом, чтобы система удовлетворяла всем
сформулированным в техническом задании (ТЗ) требованиям.
Различают синтез:
• “в большом” – когда неизвестна структура и параметры. Здесь
необходимо определить класс САУ, порядок астатизма, типы
сигналов, структуру, а затем рассчитать ее параметры.
• “в малом” – когда структура известна и известны все
передаточные функции ее элементов (двигателей, усилителей,
измерителей рассогласований и т.д.). Обычно требования к
точности настолько высоки, что САУ исходная (располагаемая)
неустойчива. Чтобы сделать ее устойчивой к ней добавляют так
называемые корректирующие (улучшающие) устройства (КУ).
Поэтому синтез “в малом” сводится к синтезу этих КУ.
4. 2. Синтез САУ по ЛАФЧХ
Этот метод прост, удобен, нагляден и сводится к
выполнению следующих этапов:
построение желаемых ЛАФЧХ Lж(ω) и φж(ω) по
данным ТЗ;
построение располагаемых ЛАФЧХ Lр(ω) и φр(ω) по
результатам статического расчета (выбора всех
элементов);
определение вида и параметров КУ на основе
сравнения Lж(ω) и Lр(ω);
техническая реализация КУ;
поверочный динамический расчет (расчет h(t));
5. 3. Построение низкочастотного участка ЛАФЧХ
Построение желаемой ЛАФЧХ Lж(ω) по данным ТЗ.Чтобы синтезировать систему в ТЗ должны быть заданы:
а) вид входного сигнала x(t) – формула, график;
b) Допустимая в САУ ошибка εд(t);
c) Параметры h(t): σ% (перерегулирования), tp(время
регулирования), “m” (число полных колебаний) в h(t),
и др., а также запасы устойчивости САУ по фазе и
амплитуде ∆φ и ∆L;
d)Условия работы САУ (tºC, давление, влажность и т.д.).
x(s)
ε(s)
Wp (S)
y(s)
6.
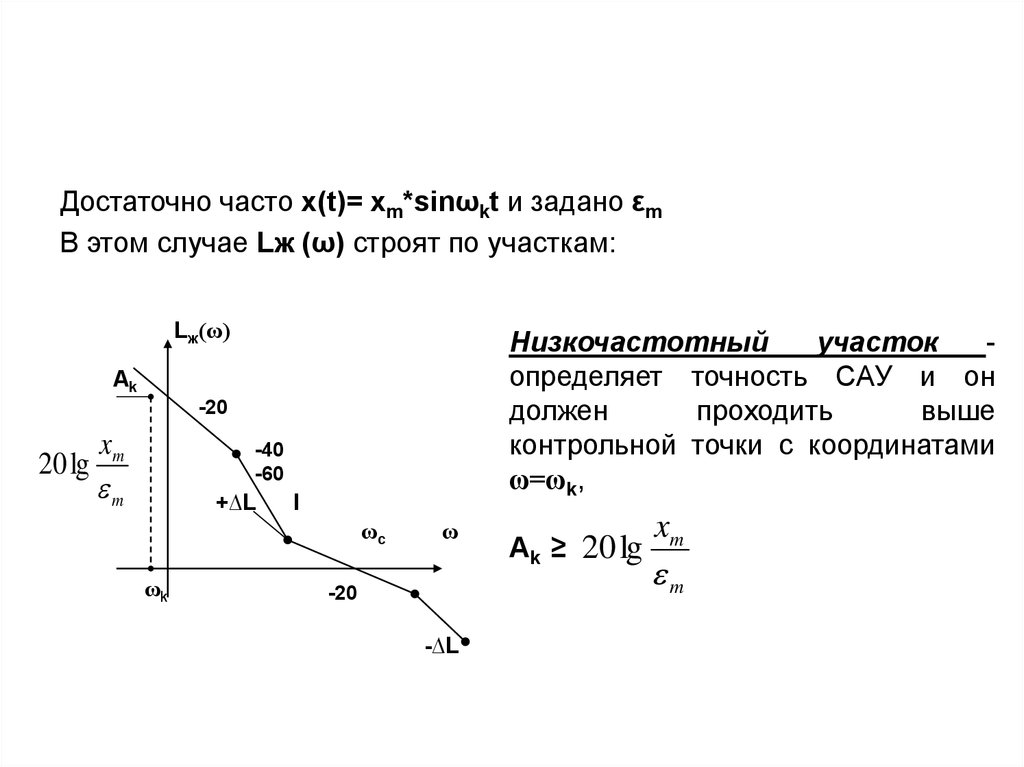
Достаточно часто x(t)= xm*sinωkt и задано εmВ этом случае Lж (ω) строят по участкам:
Lж(ω)
Низкочастотный
участок
определяет точность САУ и он
должен
проходить
выше
контрольной точки с координатами
ω=ωk,
Ak
-20
xm
20 lg
m
-40
-60
+∆L
I
ωс
ωk
ω
-20
-∆L
Ak ≥ 20 lg
xm
m
7. 4. Построение среднечастотного участка ЛАФЧХ
Этот участок определяет запасыустойчивости САУ и качественные
показатели переходных процессов.
τ
σ%
τ
4π/ωп 40
3π/ωп 30
σ
2π/ωп 20
π/ωп 10
Pm
Pm
Для
построения
его
разработаны
номограммы,
например,
В.В.
Солодовниковым. Зная σ % из ТЗ можно
найти ωп. Из рисунка для ЛАФЧХ. видно
что: ωп ≈ (0,6÷0,9) ωс. На рисунке Pm – это
максимальное значение вещественной
части характеристики
Ф(ω)=P(ω)+ju(ω)
8.
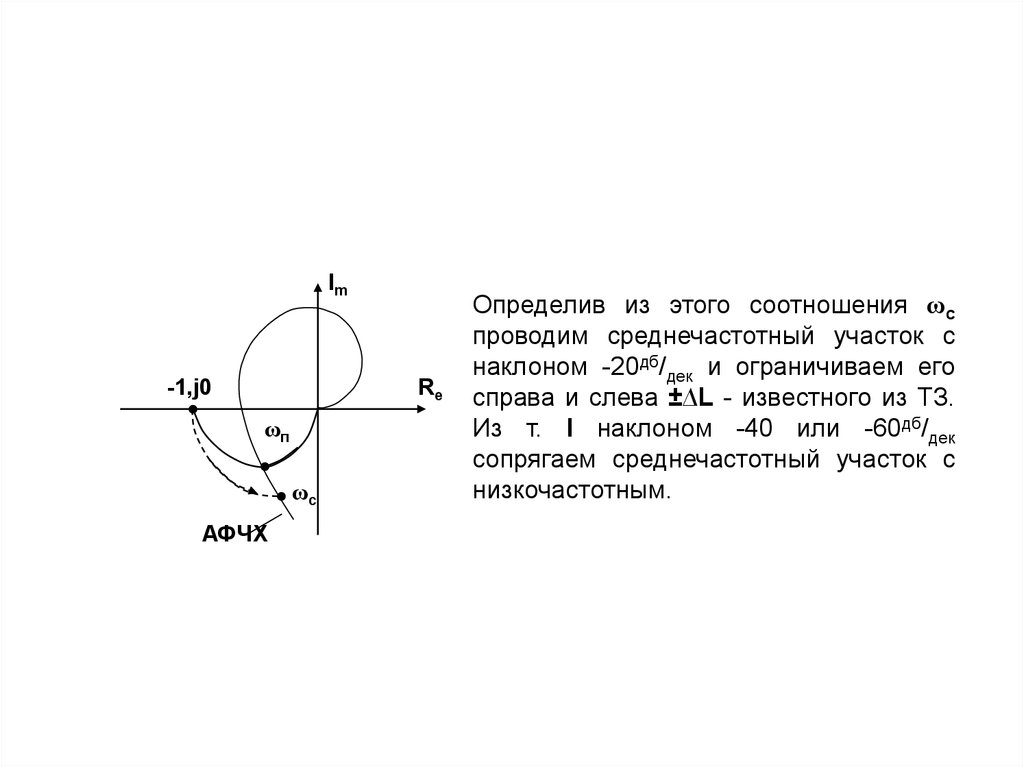
Im-1,j0
Re
ωп
ωс
АФЧХ
Определив из этого соотношения ωс
проводим среднечастотный участок с
наклоном -20дб/дек и ограничиваем его
справа и слева ±∆L - известного из ТЗ.
Из т. I наклоном -40 или -60дб/дек
сопрягаем среднечастотный участок с
низкочастотным.
9. 5. Высокочастотный участок
Высокочастотный участок – маловлияет на устойчивость и h(t), и для
упрощения синтеза изломы Lж(ω) и
Lр(ω), и наклоны участков на высоких
частотах выбирают одинаковыми.
10. ПРИМЕР
Пусть в следящей системе нужно обеспечить приx(t)=0,5sin0,5t.
максимальную ошибку εm≤10΄ - угловых минут;
перерегулирования - σ≤25%;
время регулирования - tу≤0,2 сек.
1. Построим контрольную точку Ак:
- ее ордината – 20 lg xm 20 lg 0,5 * 57,3 * 60 20 lg 180 45дб
m
10
360 0
57,30
2
Примечание: в одном радиане
,
в одном градусе – 60΄ угловых
минут
11.
- частота контрольной точки ωk=0,5 1/cек.Чтобы система обладала заданной
точностью низкочастотный участок
должен проходить выше контрольной
точки Ак.
12.
2. Найдем положение среднечастотного участка.Для этого по номограмме при σ≤25% найдем:
4
п
t у 0,2сек
Откуда частота положительности, т.е. частота на
которой P(ω) пересекает ось частот равна
4
п
62,8 1/сек
0,2
Примем, что частота среза составляет 0,7 от
частоты положительности, т.е.:
с 0,7 п 50 1/сек
13.
Построим далее Lж(ω), задавшисьзапасами устойчивости по амплитуде
∆L=±10дб (эти запасы ограничат нам
протяженность среднечастотного
участка)
L(ω)
60
Ак
45
40
20
0,1 0,5 1
∆L
10 50
ω
100
∆L
1000
14. 6. Синтез последовательных КУ.
Последовательные КУ включаютсяпоследовательно в прямой канал системы.
Х(s)
wж(s)
Wку(s)
У(s)
Wp(s)
КУ
Как видно wж(s)=wку(s)*wр(s)
20 lg wж ( ) 20 lg wку ( ) 20 lg wp ( )
т.е. Lку(s)=Lж(s)-Lр(s)
15.
Т.о. синтез последовательного КУ выполняетсяв следующем порядке:
1. Строят Lж(ω) по данным ТЗ;
2. Строят Lр(ω) после выбора всех элементов
САУ (двигателя, усилителя и т.д.)
3. Определяют Lку(ω)=Lж(ω)-Lр(ω);
4. По виду Lку(ω) определяют wку(s);
5. По виду wку(s) и справочникам находят
принципиальную схему КУ и рассчитывают
ее электрические параметры (R-активные
сопротивления; С-емкости конденсаторов;
L-индуктивности катушек и т.д.);
6. Рассчитывают переходную функцию h(t) и
убеждаются, что цель коррекции достигнута
(поведение системы соответствует
требованиям ТЗ).
16. ПРИМЕР
Пусть:Построим Lр(ω)
100
wp ( s)
S ( S 1)
Lp(ω)
ω1
ω2
40
Lку(ω)
20
ω
0,1
1,0
100
Lр(ω)
φ(ω)
1000
Lж(ω)
ω
0
-90
∆φж
-180
∆φp
φp(ω)
φж(ω)
17.
При построении учтем, чтонизкочастотный участок с наклоном
-20бд/дек пересечет ось частот на
частоте ω=100, а второй участок с
наклоном -40дб/дек начинается с
частоты ω=1.
Построив φр(ω)=-900-arctgω убеждаемся,
что запас устойчивости САУ по фазе
∆φр слишком мал.
18.
Построим далее Lж(ω) по данным ТЗ как этообсуждалось выше и предположим она
выглядит как показано на рисунке.
Найдем разницу Lку(ω)=Lж(ω) - Lр(ω), как это
показано на рисунке.
Построим
1
1
0
ж ( ) 90 arctg arctg * arctg *
1
2
определяя сопрягающие частоты по виду Lж(ω) и
убедимся в том, что запас ∆φж(ω) стал
достаточным.
19.
По виду Lку(ω) найдем его передаточнуюфункцию:
1
S 1
wку ( s ) 1
1
S 1
2
Далее по справочникам можно определить его
принципиальную схему и рассчитать его
параметры.