












 справедливо и для амплитуд, т.е.")

")

 необходимо:")


 в степенной ряд путем деления числителя на знаменатель")













 electronics
electronicsSimilar presentations:





")




Точность систем автоматического управления
1. Точность САУ
2. План
1 Общие положения2 Понятие о типовых режимах САУ
3 Теорема о предельном значении оригинала и
методика определения установившихся
ошибок
4 Ошибки статических и астатических САУ в
типовых режимах
5 Ошибки САУ при произвольных входных
сигналах (коэффициенты ошибок)
6 Методы повышения точности САУ
3. 1 Общие положения
Точность является важнейшим критериемкачества систем. В настоящее время
практически все многочисленные
элементы любых технических систем
изготавливаются автоматически т.е. с
помощью САУ. Таким образом точность
САУ определяет качество продукции,
товаров, их надежность,
энергопотребление, долговечность и т.д.
и т.п.
4. 2 Понятие о типовых режимах САУ
Точность САУ принято оценивать по величинеошибок в типовых режимах. Типовыми
называются режимы просто описываемые
математически и имеющие четкий
физический смысл. К ним относятся:
- режим покоя, когда х(t)=const;
- режим линейно-нарастающих сигналов, когда
х(t)=a*t, где а=const;
- режим гармонических входных сигналов,
когда х(t)=A*sinωt.
5.
εИтак, нам необходимо вычислить
установившуюся ошибку ε(t) при t→∞,
при типовых режимах и по ней можно
будет судить о точности САУ.
6. 3 Теорема о предельном значении оригинала и методика определения установившихся ошибок
Сформулируем для этого теорему определьном значении оригинала:
limX(t)=limX(s),
t→ ∞
s→ 0
т.е. предел оригинала при t→∞ равен
пределу изображения по Лапласу при
s→0.
7.
Передаточная функция САУ по ошибке:( s)
1
F (s)
x( s ) 1 w p ( s )
Итак, чтобы определить установившуюся (при t→ ∞)
ошибку САУ нужно:
- Найти x(s) зная x(t)
- Определить Fε(s)
- Найти ε(s)= X(s) * Fε (s)
- Определить εуст= lim ε(s)
S→0
8. 4 Ошибки статических и астатических САУ в типовых режимах
Рассмотрим ошибки САУ в типовых режимах:1. Ошибка САУ в покое (статическая ошибка)
X(t)=X0=const X(s)=X0
K
Пусть W p ( s )
- статическая
(T1S 1)(T2 S 1)
САУ, поскольку в знаменателе нет
множителя S, т.е. интегрирующего элемента
в системе
9.
По теореме о предельном значении аргумента1
ст lim (t ) lim (s) (s) * F (s) (s) *
t
s 0
1 Wp ( s)
Подставляя Wp(s) в (1) получим:
X 0 (T1S 1)(T2 S 1)
X0
ст lim
s 0 (T S 1)(T S 1) K
1 K
1
2
(1)
10.
Статическая ошибка встатической САУ в
(1+К) раз меньше
входной величины.
y(t)
X0
εст
t
11.
Пусть теперь- астатическая САУ (есть
интегратор, т.е.
множитель S в знаменателе передаточной
функции)
K
W p ( s)
S (T1S 1)
ст
X 0 *1
X 0 S (TS 1)
lim (s) lim
lim
0
s 0
s 0 1 W ( s )
s 0 K S (TS 1)
p
12.
Таким образом,статическая ошибка
в астатической САУ
равна 0
y(t)
X0
εст=0
t
13.
2. Второй типовой режим - движение с постояннойскоростью (скоростная ошибка)
x(t)=at
a=cost
x( s)
a
s
Пусть:
K
W p ( s)
- статическая САУ
(T1S 1)(T2 S 1)
Тогда:
a (T1S 1)(T2 S 1)
(
t
)
lim
t a s 0 s K (T1S 1)(T2 S 1)
14.
x(t)=atεα→∞
y(t)
α
t
tgα=a
Ошибка в статической
САУ при линейнонарастающем входном
сигнале x(t)=at
возрастает до ∞.
Т.о. статические САУ в
таком режиме не
работоспособны.
15.
Пусть теперьK
Wp ( s)
S (TS 1)
- астатическая САУ
Тогда
S ( ST 1)
a
a
*
t a ( t ) lims 0(s) lim
s 0 s
K S (TS 1) K
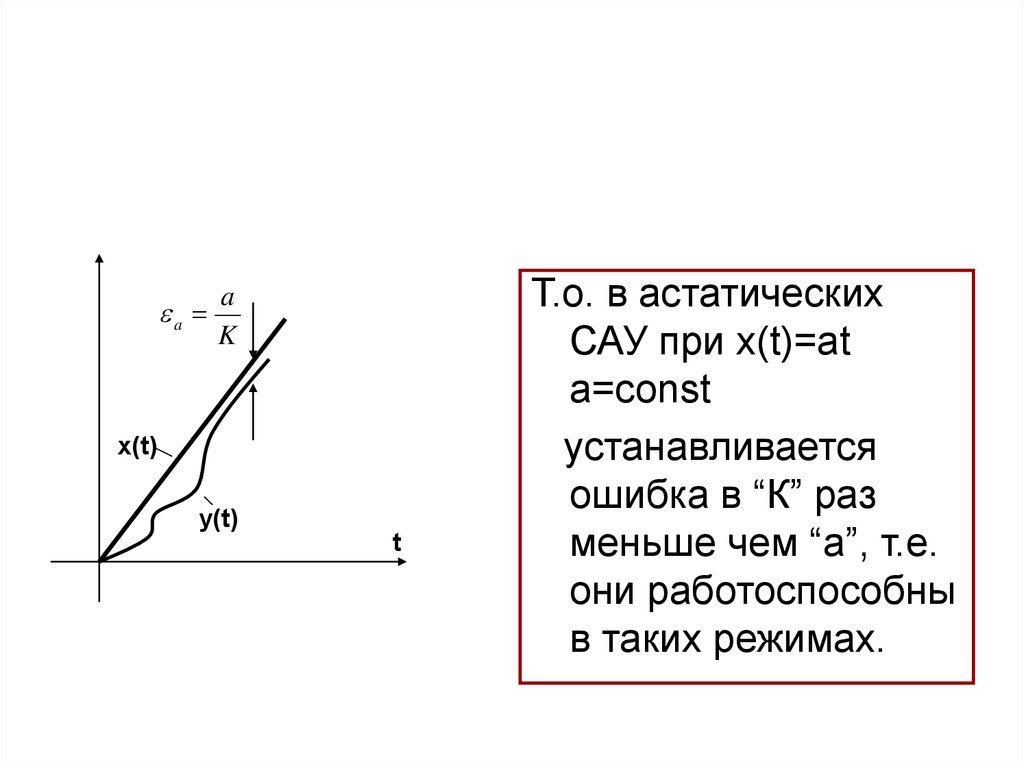
16.
aa
K
x(t)
y(t)
t
Т.о. в астатических
САУ при x(t)=at
a=const
устанавливается
ошибка в “К” раз
меньше чем “a”, т.е.
они работоспособны
в таких режимах.
17. 3. Третий режим - гармонических входных сигналов.
Пусть x(t)=xmsinωktxm,ωk – амплитуда и
частота “качки”.
x(s)
ε(s)
Wp(S)
y(s)
18. Определим амплитуду εm ошибки САУ в этом режиме.
Для этого найдем:1
( s)
F ( s)
1 W p ( s ) x( s )
- ПФ САУ по ошибке
Подставим S=jωk
X ( j k )
( j k )
1 Wp ( j k )
(1)
19. Выражение (1) справедливо и для амплитуд, т.е.
mxm
Xm
1 W p ( j k ) W p ( j k )
Откуда следует:
W p ( j k )
Ак
20 lg
xm
xm
(2)
m
Прологарифмируем (2):
L(ω)
m
ω
ω=ωk
Ак – контрольная точка
20 lg W p ( j k ) 20 lg
xm
m
(3)
20.
Из (3) следует, что САУ будет иметь амплитудуошибки не более допустимой εдоп, если
20 lg W p ( j k ) L( k ) 20 lg
xm
доп
21. Т.о. чтобы ошибка САУ в гармоническом режиме не превышала допустимой εдоп необходимо:
1. Определить положение контрольной точкиАк с координатами:
xm
ω=ωк и 20 lg
доп
2. Обеспечить прохождение L(ω) выше
контрольной точки Ак
22. 5 Ошибки САУ при произвольных входных сигналах (коэффициенты ошибок)
Пусть на вход САУ действует сигнал x(t)произвольной формы. Чтобы определить
ошибку ε(t) в этом случае найдем вначале ее
изображение.
x(s)
ε(s)
Wp(S)
y(s)
23.
( s)Поскольку:
1
F ( s)
x( s ) 1 W p ( s )
(1)
То:
x( s )
( s)
1 Wp ( s)
(2)
Разложим далее Fε(s) по возрастающим
степеням S в ряд, тогда (2) можно записать в
виде:
C2 2 C3 3
( s ) C0 C1S S S x( s )
2!
3!
(3)
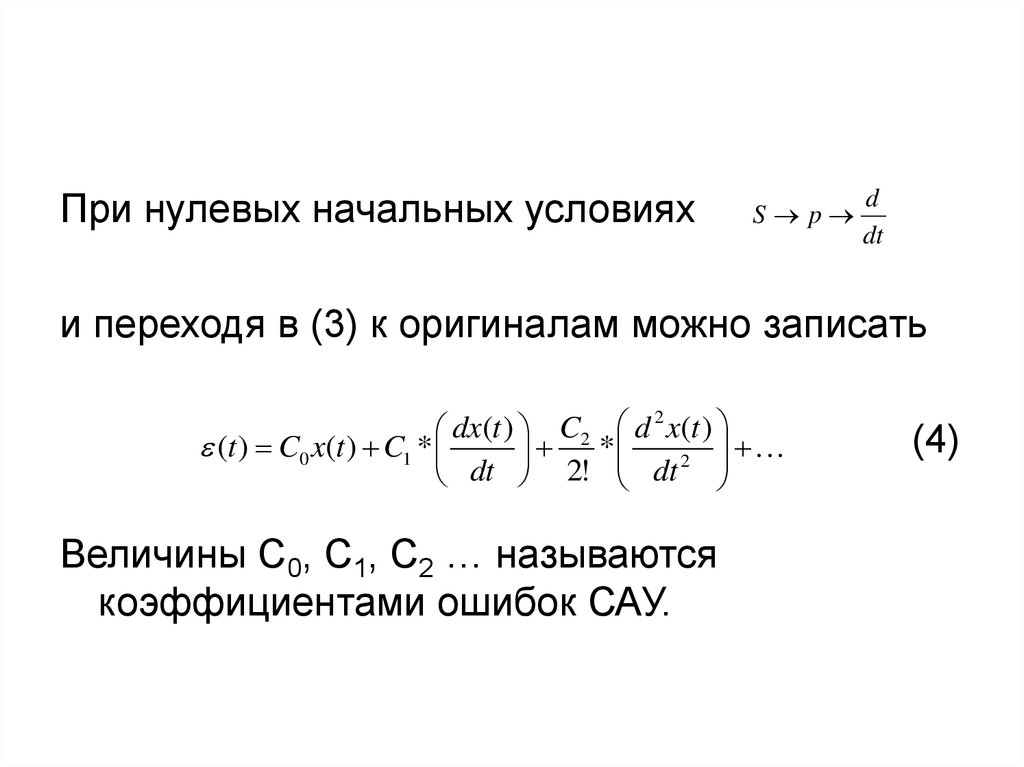
24.
При нулевых начальных условияхS p
d
dt
и переходя в (3) к оригиналам можно записать
2
dx(t ) C2 d x(t )
(t ) C0 x(t ) C1 *
*
2
dt 2! dt
Величины С0, С1, С2 … называются
коэффициентами ошибок САУ.
(4)
25. Чтобы определить ошибку САУ при произвольной форме входного сигнала x(t) необходимо:
1. Определить передаточную функциюСАУ по ошибке Fε(s);
2. Разложить в ряд Fε(s) путем деления
ее числителя на знаменатель и найти
коэффициенты С0, С1, С2 …;
3. Подставить коэффициенты ошибок в
(4) и найти установившуюся ошибку
ε(t).
26. Пример
Найти ошибку в САУ при:Если:
bt 2
x(t ) x0 at
2
K
W p (s)
S (T1S 1)(T2 S 1)
27. Решение:
1.Найдем1
F (s)
1 Wp ( s)
1
S (T1S 1)(T2 S 1)
T1T2 S 3 (T1 T2 ) S 2 S
F ( s)
1 W p ( s) K S (T1S 1)(T2 S 1) T1T2 S 3 (T1 T2 ) S 2 S K
28. 2. Разложим (1) в степенной ряд путем деления числителя на знаменатель
S (T1 T2 ) S T1T2 S2
-
-
3
1
1
S S 2 * (T1 T2 ) S 3 ...
K
K
1 2
T T 3
T1 T2 S T1T2 1 2 S ...
K
K
1 2
T1 T2 S ...
K
K S (T1 T2 )S 2 T1T2 S 3
1 2
1 1
S * T1 T2 S
K
K K
29.
Ограничимся первыми тремя членамиряда, т.к. входной сигнал X(t) имеет
лишь три не нулевых первых
производных.
30.
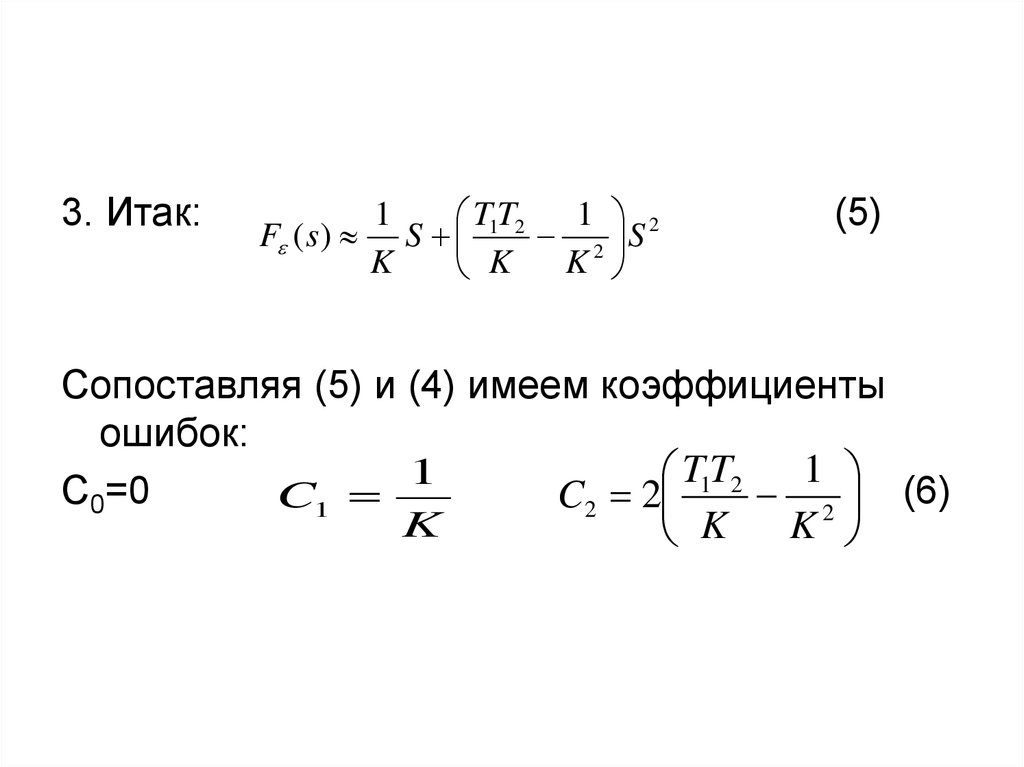
3. Итак:1
1 2
T1T2
F ( s ) S
2 S
K
K
K
(5)
Сопоставляя (5) и (4) имеем коэффициенты
ошибок:
T1T2
1
1
С0=0
C2 2
2 (6)
C1
K
K
K
31.
4. Определим далее производные от X(t):bt 2
x(t ) x0 at
2
dx(t )
a bt
dt
d 2 x(t )
b
dt
(7)
32.
5. Подставляя коэффициенты С0, С1, С2… ипроизводные (7) в (4) получим:
1
1
T1T2
(t ) * (a bt )
2 *b
K
K
K
Т.е. ошибка с течением времени будет
нарастать до ∞ из-за члена “bt”.
33. 6 Методы повышения точности САУ
Анализируя выражения длякоэффициентов ошибок отметим, что:
1. Все коэффициенты обратнопропорциональны коэффициенту К –
усиления системы;
2. Чем выше порядок астатизма “v” тем
большее количество первых
коэффициентов ошибок равны 0
34. ВНИМАНИЕ
Порядок астатизма “v” определяется числоминтегрирующих звеньев в контуре системы.
Формально “v” равно показателю степени
множителя S в знаменателе передаточной
функции wp.
N ( s)
wp v
S M ( s)
35. 1. Первый способ повышения точности САУ – увеличение К
Т.о. самым универсальным способомповышения точности САУ являются
увеличение коэффициента К усиления
системы. При этом все коэффициенты
ошибок уменьшаются, а это означает, что
система во всех режимах работы будет иметь
меньшие ошибки. Однако этот способ
снижает запасы устойчивости системы и рано
или поздно приводит к полной потере
устойчивости. Это можно показать на
примере критерия Найквиста.
36.
ImK2>K1
К1
К2
-1;j0
wp(jω)
Re
37. 2. Способ повышения точности САУ – путем увеличения астатизма “v”
Этот способ исключает первые коэффициенты вряду ошибок. Действительно:
v=0 (статическая САУ)
Все коэффициенты не
равны 0, т.е. с0≠0 с1≠0
с2≠0 …, т.е. статическая
система в любых
режимах работы, в т.ч. и
в покое будет иметь
ошибки
38.
v=1 (астатическая САУс астатизмом
первого порядка)
с0=0 с1≠0 с2≠0 …, т.е.
такая система не
будет иметь ошибки
в режиме покоя.
v=2 (астатическая САУ
с астатизмом
второго порядка)
с0=0 с1=0 с2≠0 с3≠0 …,
такая система не
будет иметь ошибок
не только в режиме
покоя, но и при
линейнонарастающем
сигнале
39.
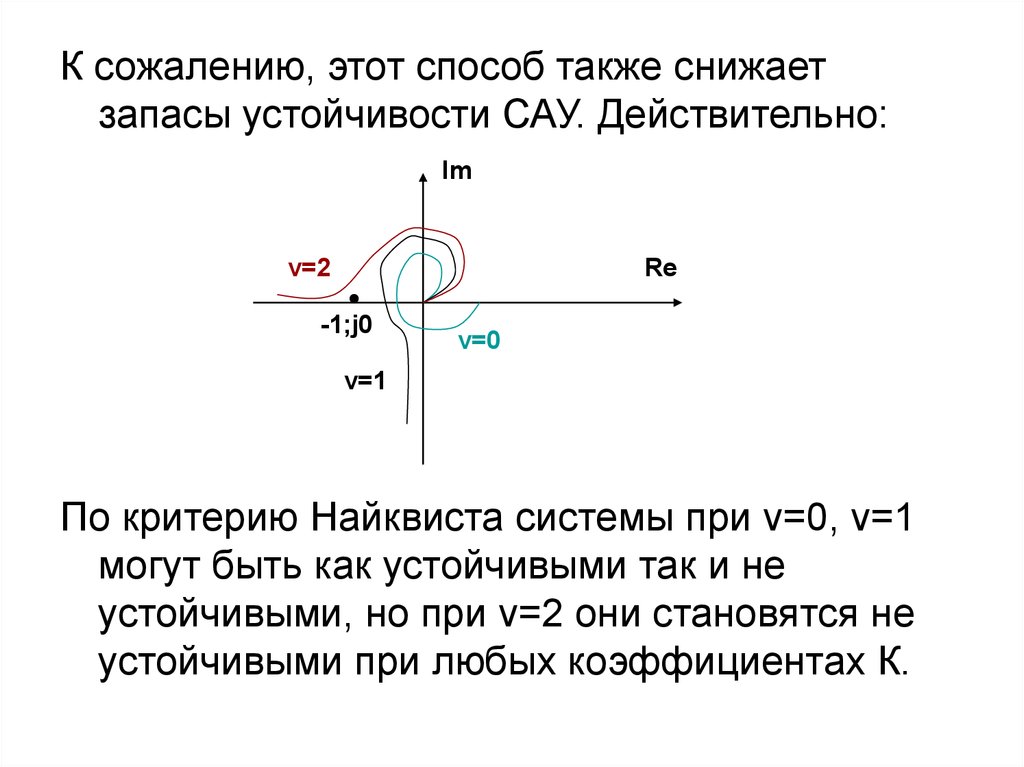
К сожалению, этот способ также снижаетзапасы устойчивости САУ. Действительно:
Im
v=2
Re
-1;j0
v=0
v=1
По критерию Найквиста системы при v=0, v=1
могут быть как устойчивыми так и не
устойчивыми, но при v=2 они становятся не
устойчивыми при любых коэффициентах К.
40. 3. Повышение точности САУ с использованием принципов комбинированного управления.
Принцип комбинированного управлениясостоит в том, что в дополнение к принципу
обратной связи реализуется принцип
управления по возмущению. V(t)
Измеритель
x(t)
y(t)
Регулятор
Объект
41.
Здесь сочетается (комбинируются) обаназванных принципа:
- Управление по возмущению (за счет
измерения возмущения v(t) и выработки
дополнительного управляющего сигнала
компенсирующего действия возмущения);
- Управление по отклонению или принцип
обратной связи реализуется за счет главной
отрицательной обратной связи и сигнала
рассогласования и регулятора.
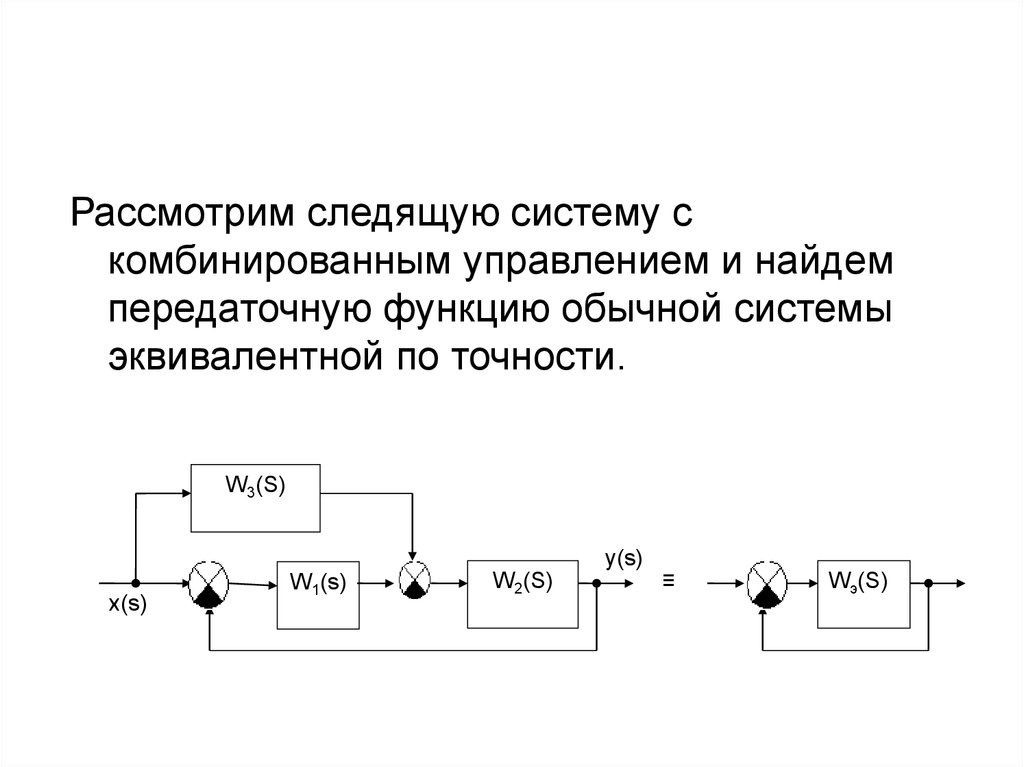
42.
Рассмотрим следящую систему скомбинированным управлением и найдем
передаточную функцию обычной системы
эквивалентной по точности.
W3(S)
y(s)
x(s)
W1(s)
W2(S)
≡
Wэ(S)
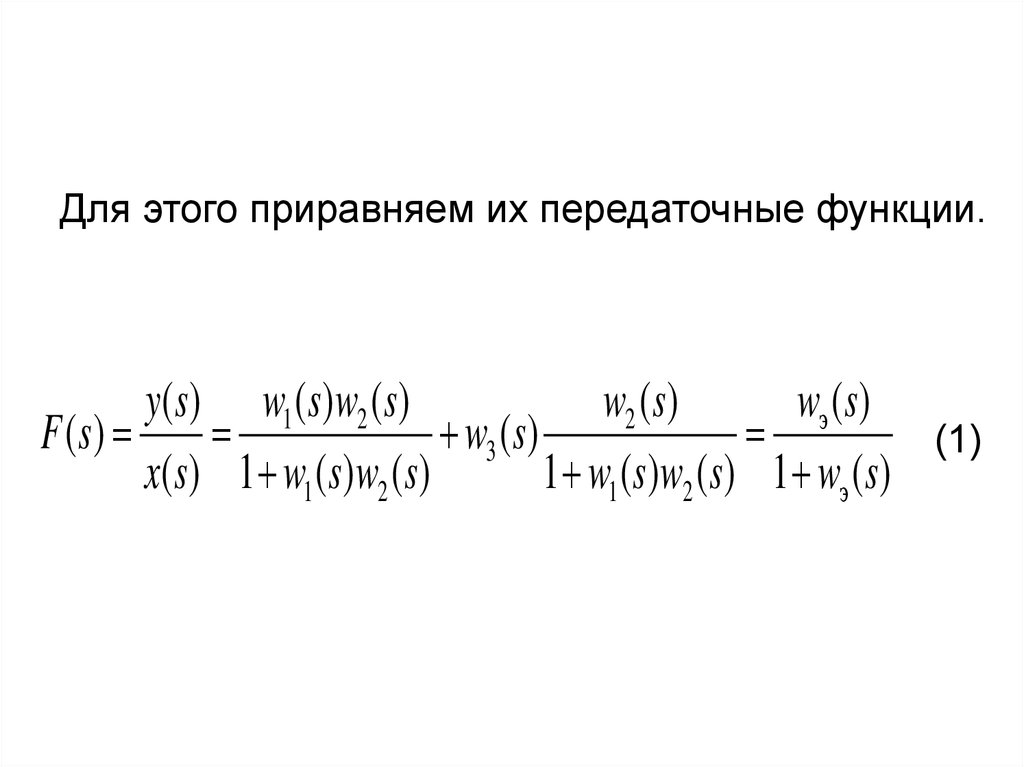
43.
Для этого приравняем их передаточные функции.wэ (s)
y(s) w1 (s)w2 (s)
w2 (s)
F (s)
w3 (s)
x(s) 1 w1 (s)w2 (s)
1 w1 (s)w2 (s) 1 wэ (s)
(1)
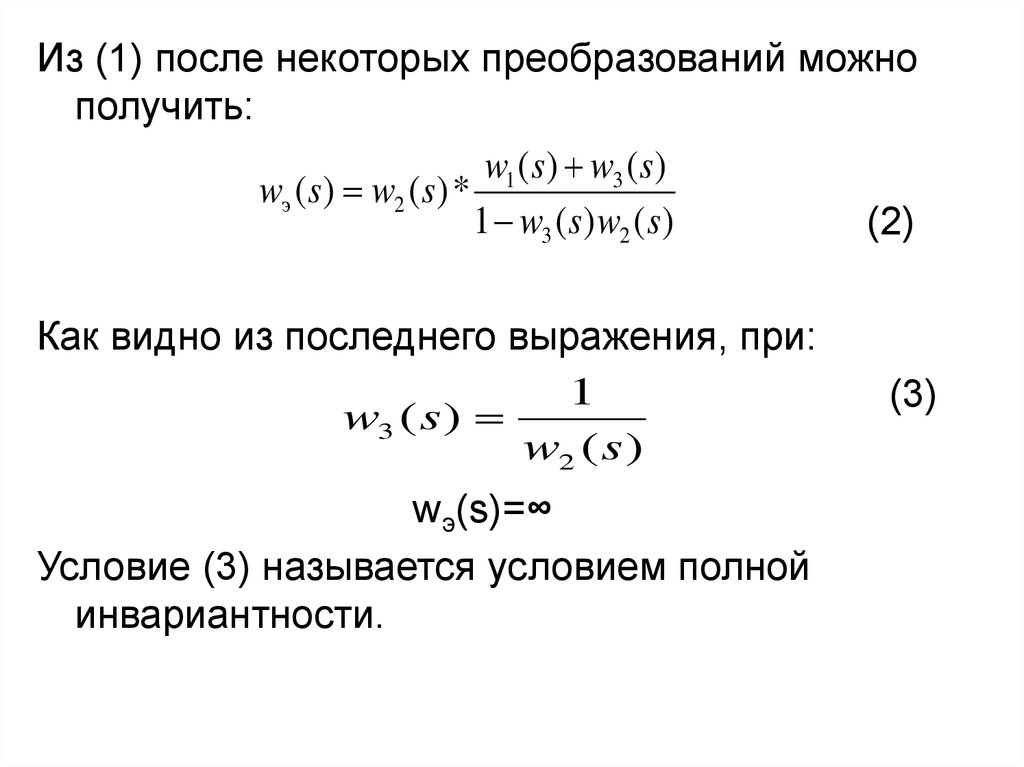
44.
Из (1) после некоторых преобразований можнополучить:
w1 ( s) w3 ( s)
wэ ( s) w2 ( s) *
1 w3 ( s) w2 ( s)
(2)
Как видно из последнего выражения, при:
1
w3 ( s )
w2 ( s )
wэ(s)=∞
Условие (3) называется условием полной
инвариантности.
(3)
45.
Это означает, что ошибка рассматриваемойкомбинированной следящей системы будет
равна 0 в любых режимах работы поскольку:
( s)
1
F ( s )
0
x( s ) 1 wэ ( s )
46.
Достоинство принципа комбинированногоуправления в том, что он не изменяет
(не ухудшает) устойчивости и качества
переходных процессов. Однако,
реализовать точно условие полной
инвариантности практически
невозможно.
47. ПРИМЕР
Пусть:K
w2 ( s)
S (T1S 1)(T2 S 1)
Найдем:
1
S (T1S 1)(T2 S 1) 1
T1 T2 2 T1T2 3
w3 ( s)
S
S
S
w2 ( s)
K
K
K
K
48.
Структурная схема такой комбинированнойследящей системы имеет вид:
III
II
I
T1T2
S3
K
T1 T2 2
S
K
1
S
K
x(s)
w1(s)
K
S (T1S 1)(T2 S 1)
y(s)
49.
Итак, чтобы точно реализовать условие полнойинвариантности в нашем примере необходимо:
• реализовать канал I (тахогенератор)
• реализовать канал II (это 2-ая производная от угла)
• реализовать канал III (это 3-ая производная от угла)
Точно это сделать практически нельзя. Кроме того, в
реальных САУ имеется множество нелинейностей,
которые мы не учитывали при выводе условия
полной инвариантности.
Поэтому часто используют частично-инвариантные
САУ, т.е. САУ не имеющие ошибок лишь в некоторых
режимах.