")






 – элемента – это отношение преобразования по Лапласу от выходной величины к преобразованию по Лапласу от входн")
 – САУ – управляющее воздействие формируется с учетом сравнения отклонения y(s) от заданного положения. Данное отк")

 статические характеристики: это зависимости “вход-выход” в статическом режиме.")

 Временные характеристики САУ – это реакции системы на типовые входные воздействия.")
 – это реакция системы на единичное ступенчатое входное воздействие.")

 Частотные характеристики элементов и САУ")
.")

, при 0<ω<∞")
 между входным и выходным гармоническими сигналами элемента или сис")
 Логарифмические частотные характеристики – это формулы и графики, показывающие прохождение гармонических сигналов через элементы и си")

 Алгебра передаточных функций – совокупность правил, позволяющих “сворачивать” структурные схемы САУ.")







 и весовая w(t) функции")




 и весовая w(t) функции")






 electronics
electronicsSimilar presentations:






")



Основы теории систем автоматического управления
1. Основы теории систем автоматического управления (САУ)
2. 1. Основные определения и понятия
• Управление - целенаправленноевоздействие на некоторый объект
(автомобиль, станок, атомный реактор,
фирму, завод…)
• Автоматическое управление –
управление без участия человека (чем
проще объект управления, тем проще
исключить человека)
3. Автоматизированное управление – управление с участием человека (чем сложнее объект управления, тем сложнее полностью исключить человека
Автоматизированное управление– управление с участием человека
(чем сложнее объект управления,
тем сложнее полностью исключить
человека из процесса управления).
Управление экономическими
объектами как правило
автоматизированное.
4. Магистральная линия развития НТП
Механизированное производство
(ручное,
дистанционное
управление)
Автоматизир
ованное
управление
Автоматиче
ское
управление
5. 2. Структурная схема САУ – графическое представление элементов САУ и связей между ними.
U77
8
8
9
x(t)
1
U2
2
U1
U9
10
3
4
U3
5
U5
6
Y (t)
U10
6.
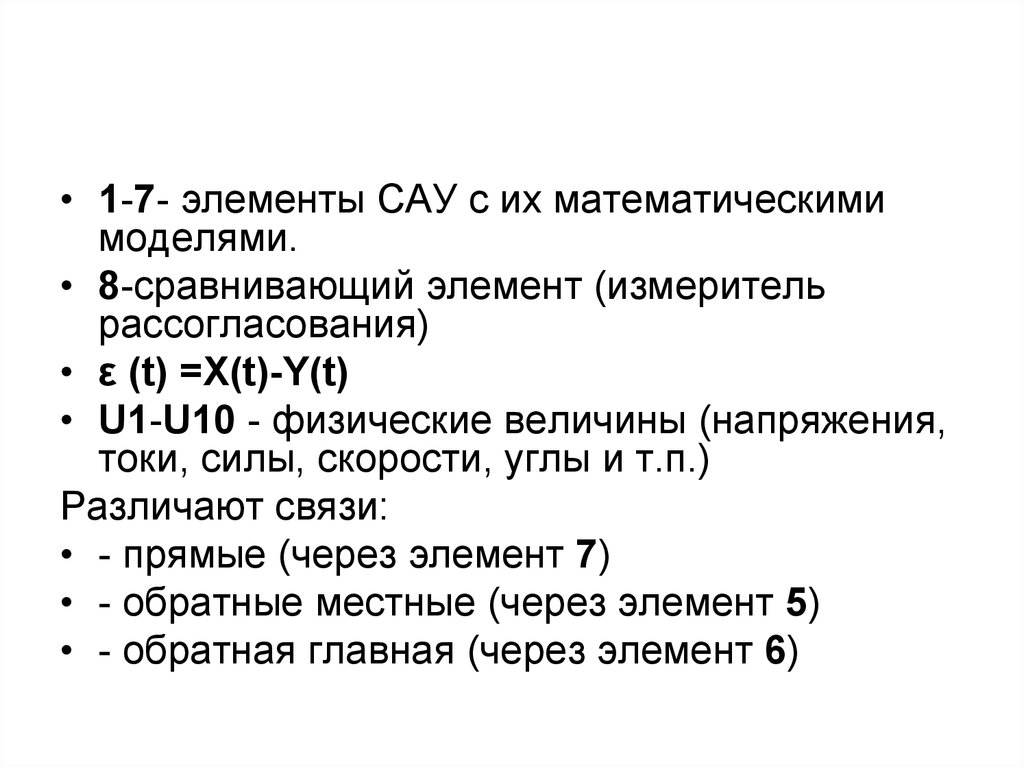
• 1-7- элементы САУ с их математическимимоделями.
• 8-сравнивающий элемент (измеритель
рассогласования)
• ε (t) =X(t)-Y(t)
• U1-U10 - физические величины (напряжения,
токи, силы, скорости, углы и т.п.)
Различают связи:
• - прямые (через элемент 7)
• - обратные местные (через элемент 5)
• - обратная главная (через элемент 6)
7. 3. Основные задачи ТАУ
статикаx(t) =const
динамика
x(t) = Var
Анализ
в «малом»
Известна
структура, но не
параметры
в «большом»
Структура и
параметры
неизвестны
Синтез
8. 4. Преобразование по Лапласу – исключительно широко использовано в ТАУ.
• Если X (t) оригинал,• а X(s) – его
изображение по
Лапласу
• и S - переменная
Лапласа, то
st
X ( s) L{x(t )} x(t ) * e * dt
0
9. 5. Передаточная функция W(s) – элемента – это отношение преобразования по Лапласу от выходной величины к преобразованию по Лапласу от входн
5. Передаточная функция W(s) –элемента – это отношение преобразования по
Лапласу от выходной величины к
преобразованию по Лапласу от входной
величины при нулевых начальных условиях:
x(s)
W(s)
y(s)
y( s)
W ( s)
x( s )
при нулевых
начальных
условиях
10. Передаточная функция W(s) – САУ – управляющее воздействие формируется с учетом сравнения отклонения y(s) от заданного положения. Данное отк
Передаточная функция W(s) –САУ – управляющее воздействие формируется
с учетом сравнения отклонения y(s) от
заданного положения. Данное отклонение
называется ошибкой САУ,
а замкнутая САУ системой с обратной связью.
x(s)
ε (s)
Wp (S)
y(s)
11.
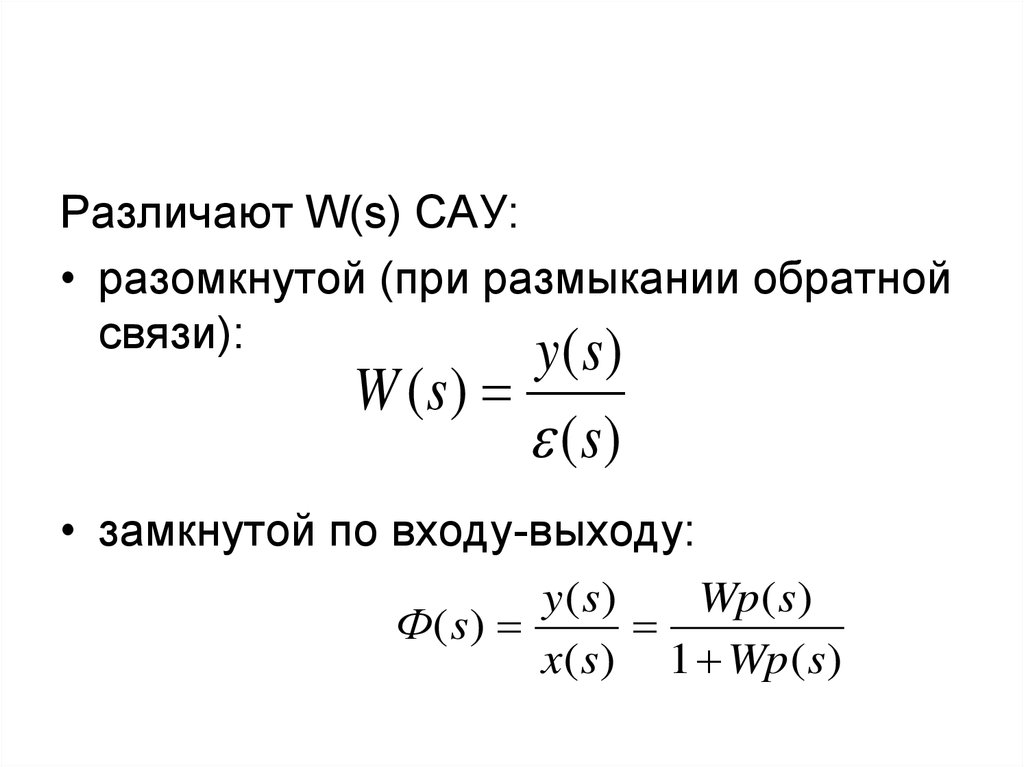
Различают W(s) САУ:• разомкнутой (при размыкании обратной
связи):
y( s)
W ( s)
( s)
• замкнутой по входу-выходу:
y ( s)
Wp ( s)
Ф( s )
x( s) 1 Wp ( s)
12.
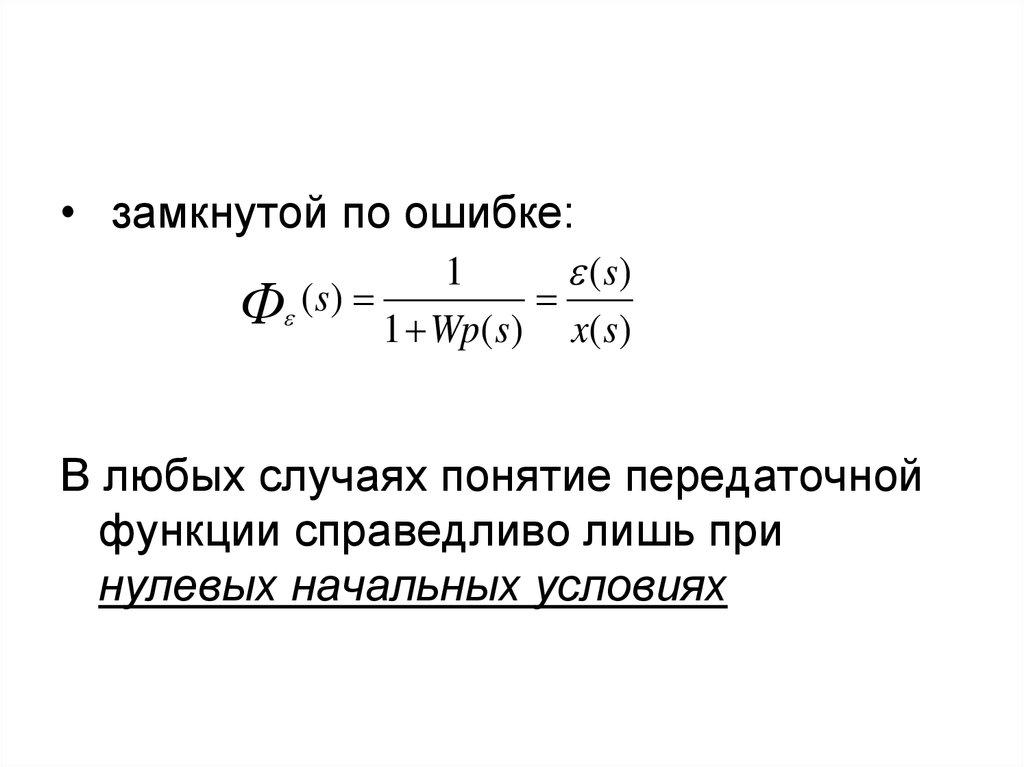
• замкнутой по ошибке:1
( s)
Ф (s) 1 Wp(s) x(s)
В любых случаях понятие передаточной
функции справедливо лишь при
нулевых начальных условиях
13.
• Перед исследованиями САУ следует«свернуть» к такому расчетному виду:
x(s)
ε(s)
Wp (S)
y(s)
14. а) статические характеристики: это зависимости “вход-выход” в статическом режиме.
Характеристики и элементы САУа) статические характеристики: это
зависимости “вход-выход” в статическом
режиме.
YY
1
2
4
5
3
X
Различают:
- линейные (2)
- нелинейные
(1,3,4,5,)
- возрастающие (1,2)
- экстремальные (4,5)
15. Пример - хорошо известные экономические кривые «спроса» и «предложения» в рыночной экономике
Цена за штКривая “предложения’
Цена
равновесия
Кривая “спроса”
Оптимальный объем продаж
Объем продаж (шт.)
16. б) Временные характеристики САУ – это реакции системы на типовые входные воздействия.
17. Переходная функция h(t) – это реакция системы на единичное ступенчатое входное воздействие.
Y(t)= h(t) при x(t)={1 при t >0}{0 при t<0}
δ%
X(t)
±5%
1
tc
По h(t) САУ оценивают:
• -δ% - перерегулирование
• - tc - время первого согласования
• - tp - время регулирования
• - m - число колебаний за t < tp
tp
t
18.
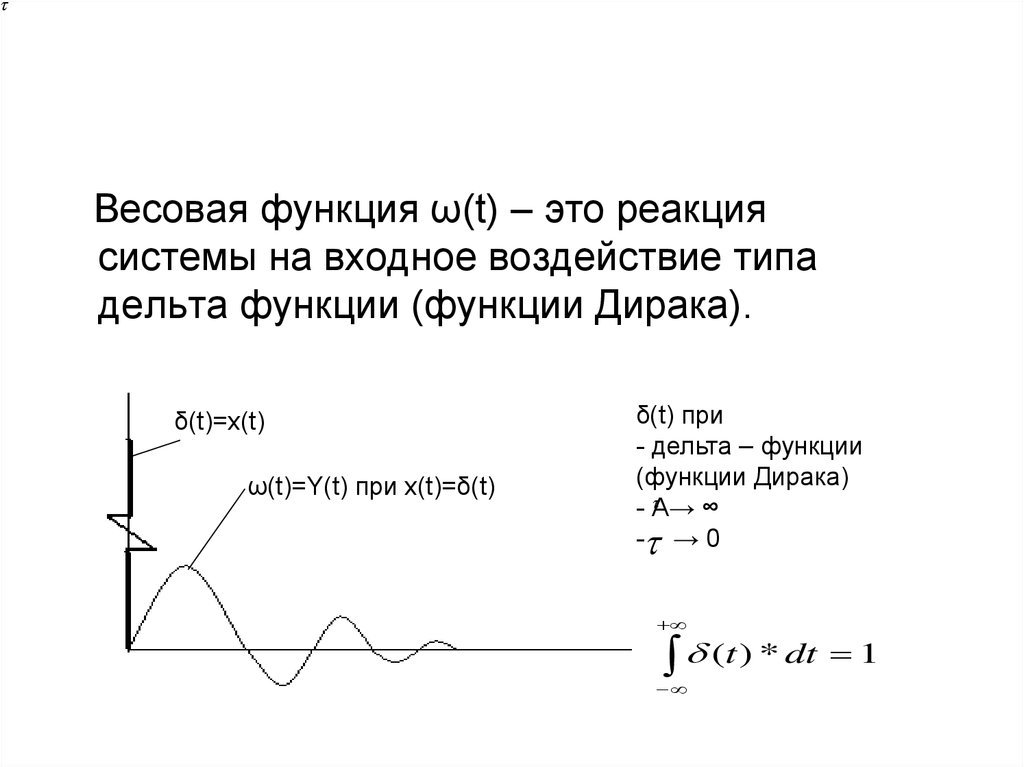
Весовая функция ω(t) – это реакциясистемы на входное воздействие типа
дельта функции (функции Дирака).
δ(t)=x(t)
ω(t)=Y(t) при x(t)=δ(t)
δ(t) при
- дельта – функции
(функции Дирака)
- А→ ∞
- → 0
(t ) * dt 1
19.
• Взаимосвязь между ω(t) и h(t):dt (t )
(t )
dt
20. в) Частотные характеристики элементов и САУ
• это формулы и графики показывающие прохождениегармонических сигналов через элементы и системы.
Различают:
21. * амплитудно-фазовая частотная характеристика (АФЧХ).
АхY
φ
Х
ω
ω
Ау
х=Ах*sin ωt
Элемент
(САУ)
y=Ay*sin(ωt+φ)
22.
ImU(ω)
φ2
φn
ωn
V(ω)
A2
ωz
φ1
A1
ω1
Re
23.
АФЧХ – годограф описываемый на комплексной плоскости
концом вектора с модулем:
Аy
А
Ax
при изменении частоты 0<ω<∞, причем угол φ
откладывается от вещественном положительной полуоси по
часовой стрелке если он отрицателен и наоборот, иначе
говоря.
А(ω)е
при 0<ω<∞
jφ(ω)
= U(ω) + jV(ω)
24. * амплитудно-частотная характеристика – это зависимость А(ω), при 0<ω<∞
* амплитудно-частотнаяхарактеристика – это зависимость А(ω),
при 0<ω<∞
А(ω)
Ay
A( )
Ax
V ( ) 2 V ( ) 2 W ( j )
при 0<ω<∞
ω
0
25. * фазо-частотная характеристика – это зависимость фазового сдвига φ(ω) между входным и выходным гармоническими сигналами элемента или сис
* фазо-частотная характеристика –это зависимость фазового сдвига φ(ω) между
входным и выходным гармоническими
сигналами элемента или системы при 0<ω<∞
φ(ω)
900
V ( )
( ) arg Y arg X arg W ( ) arctg
U ( )
450
ω
-450
-900
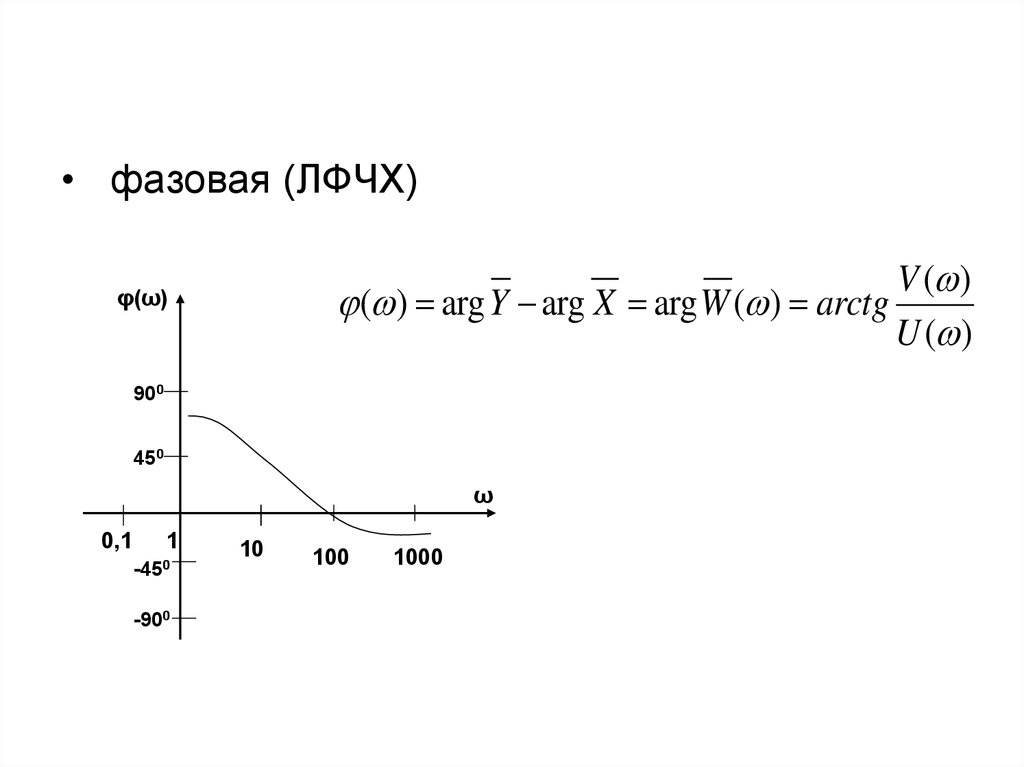
26. г) Логарифмические частотные характеристики – это формулы и графики, показывающие прохождение гармонических сигналов через элементы и си
г) Логарифмические частотныехарактеристики – это формулы и графики,
показывающие прохождение гармонических
сигналов через элементы и системы, но в
логарифмическом масштабе, когда вдоль
горизонтальной оси откладывается десятичные
логарифмы частоты.
27. Различают логарифмические характеристики
Амплитудную (ЛАЧХ) – этоAy
20 lg( ) 20 lg W ( ) 20 lg A( ) L( )
Ax
L(ω)
40
20
декада
ω
1
0,1
10
100
1000
28.
• фазовая (ЛФЧХ)V ( )
( ) arg Y arg X arg W ( ) arctg
U ( )
φ(ω)
900
450
ω
0,1
1
-450
-900
10
100
1000
29. д) Алгебра передаточных функций – совокупность правил, позволяющих “сворачивать” структурные схемы САУ.
• Последовательное соединениезвеньев
x1(s)
x2(s)
W1(s)
w2(s)
…
wn(s)
xn(s)
x1(s)
≡
w1(s) * w2(s) … wn(s)
xn(s)
т.е. при последовательном соединении
звеньев передаточные функции
перемножаются.
30.
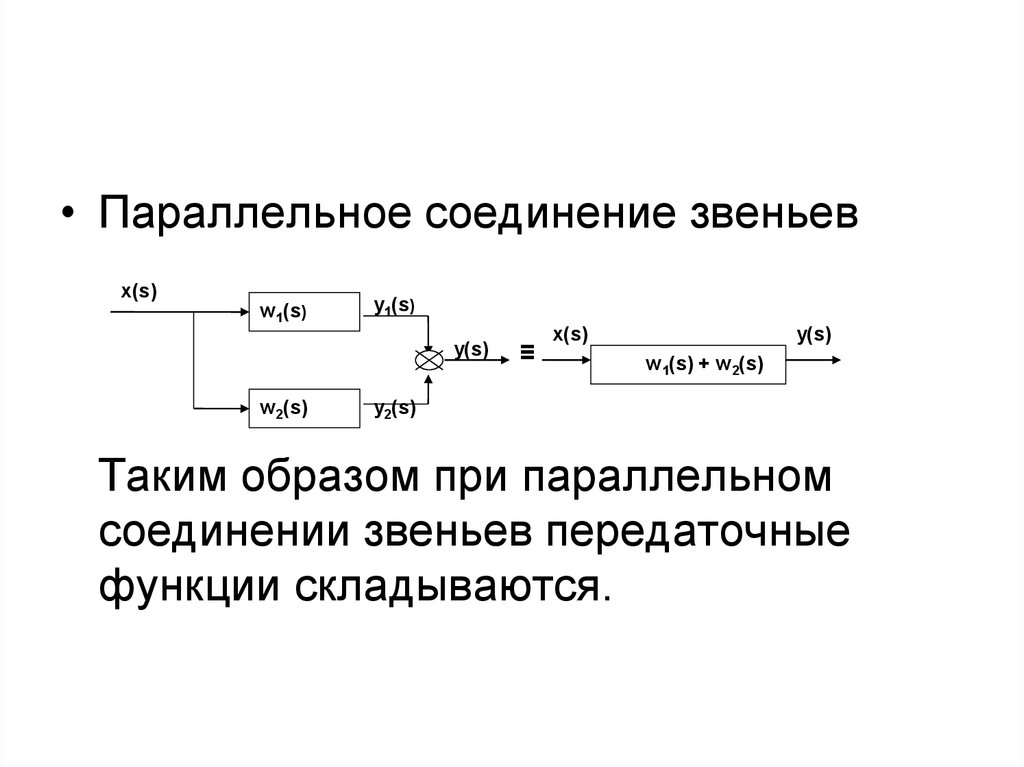
• Параллельное соединение звеньевx(s)
w1(s)
y1(s)
y(s)
w2(s)
≡
x(s)
y(s)
w1(s) + w2(s)
y2(s)
Таким образом при параллельном
соединении звеньев передаточные
функции складываются.
31.
• обратное соединение звеньевy(s)
ε(s)
x(s)
Wп(s)
±
y0(s)
w0(s)
a) При положительной ОС “+”
Y (s)
Wп ( s)
Ф( s )
X ( s ) 1 Wп ( s ) *W0 ( s )
32.
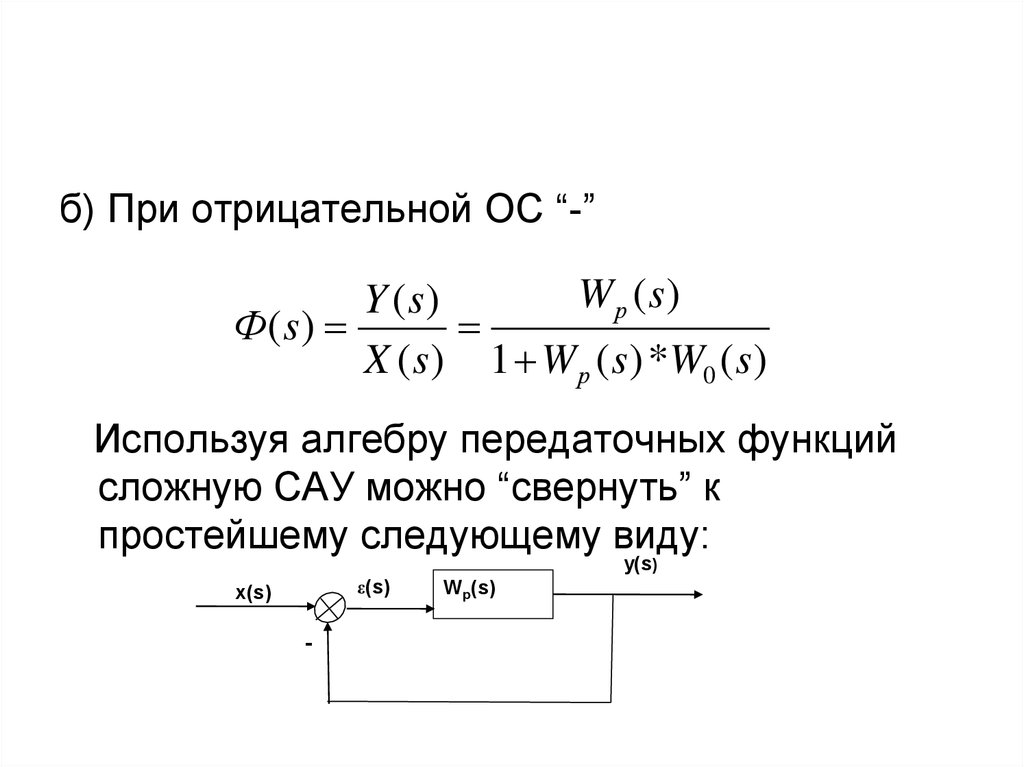
б) При отрицательной ОС “-”W р (s)
Y ( s)
Ф( s )
X ( s ) 1 W р ( s ) *W0 ( s )
Используя алгебру передаточных функций
сложную САУ можно “свернуть” к
простейшему следующему виду:
y(s)
ε(s)
x(s)
-
Wр(s)
33. Основные типы звеньев САУ
1. Идеальноеусилительное
(безинерционное) звено
Y = Kx w(s) = K w(iω) = K
A(ω) = K
φ(ω) = 0
L(ω) = 20lgK
h(t) = K ω(t) = K * δ(t)
Im
X
K
Y
АФЧХ
0<ω<∞
К
Re
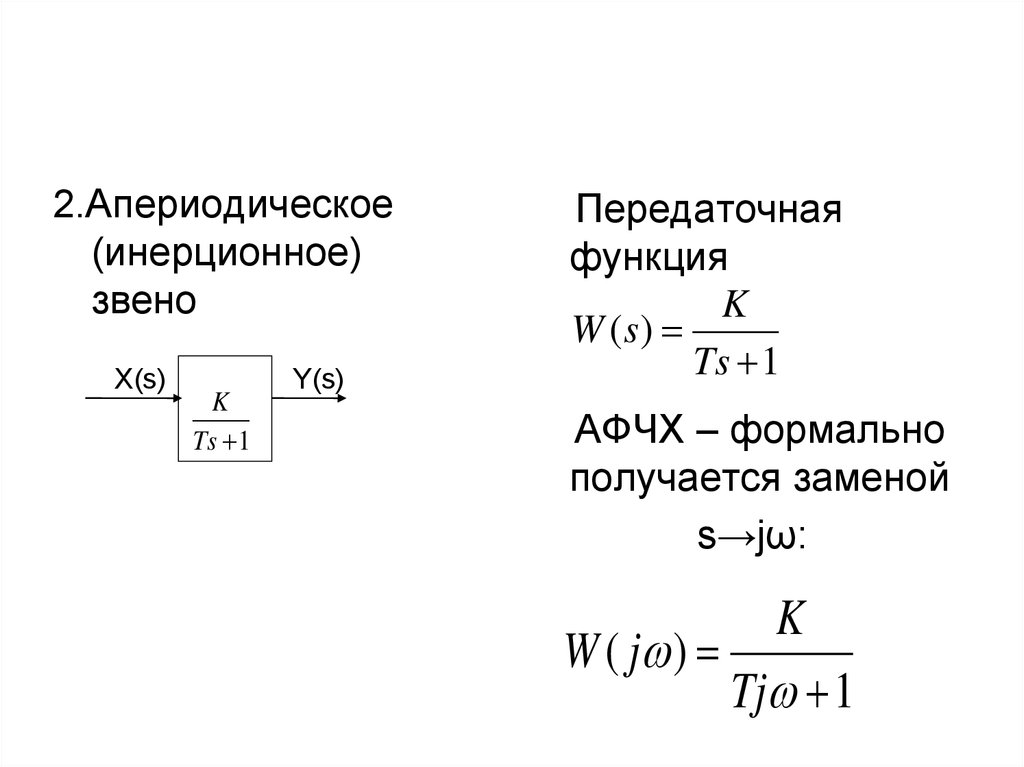
34.
2.Апериодическое(инерционное)
звено
X(s)
K
Ts 1
Y(s)
Передаточная
функция
K
W ( s)
Ts 1
АФЧХ – формально
получается заменой
s→jω:
K
W ( j )
Tj 1
35. АФЧХ
ImК
ω=∞
U(ω)
φ
W(jω)
V(ω)
ω=0
Re
36. Амплитудно-частотная характеристика
A(ω)A( ) W ( j )
K
ω
0
K
T 2 2 1
37. Фазо-частотная характеристика – это arg
W ( j )φ(ω)
-45
-90
1
T
ω
( ) arctg T
38. Логарифмическая амплитудно-частотная характеристика
Логарифмическая амплитудночастотная характеристикаL(ω)
1
c
T
20lgK
L(ω)=20lgA(ω)
-20 дб/дек
точная
20
ω
0,1
1
10
100
1000
асимптотическая
39. Логарифмическая фазо-частотная характеристика
Логарифмическая фазочастотная характеристикаφ(ω)
1
T
10
-450
-900
ω
100
1000
( ) arctg T
40. Переходная h(t) и весовая w(t) функции
h(t)K
T
Т
К
у(t)=h(t)
1
х(t)
w(t)
t
t
T
h(t ) K (1 e )
t
Т
dh(t ) K
w(t )
*e
dt
T
t
T
41.
3. Идеальноеинтегрирующее
звено
X
K
S
Y
K
W ( s)
S
K
K
W ( j )
j
j
42. АФЧХ
A*eIm
j
k
*e
900
i
( ) arctg
900
0
Re
-900
ω3
∞
0
ω2
ω1
43. ЛАЧХ и ЛФЧХ
l(ω) = 20lgA(ω) = 20lgK – 20lgωφ(ω)
L(ω)
ω
0,1
40
-20dδ/дек
20
0,1
10
100
10
100
1000
-900
ω=K
1
1
1000
ω
φ(ω)=-900
44. АЧХ и ФЧХ
φ(ω)A(ω)
A( )
K
ω
ω
0
-900
45. Переходная h(t) и весовая w(t) функции
h(t)δ(t) = x(t)
h(t) = kt
x(t)
1
α
K
ω(t)
tgα = K
t
t
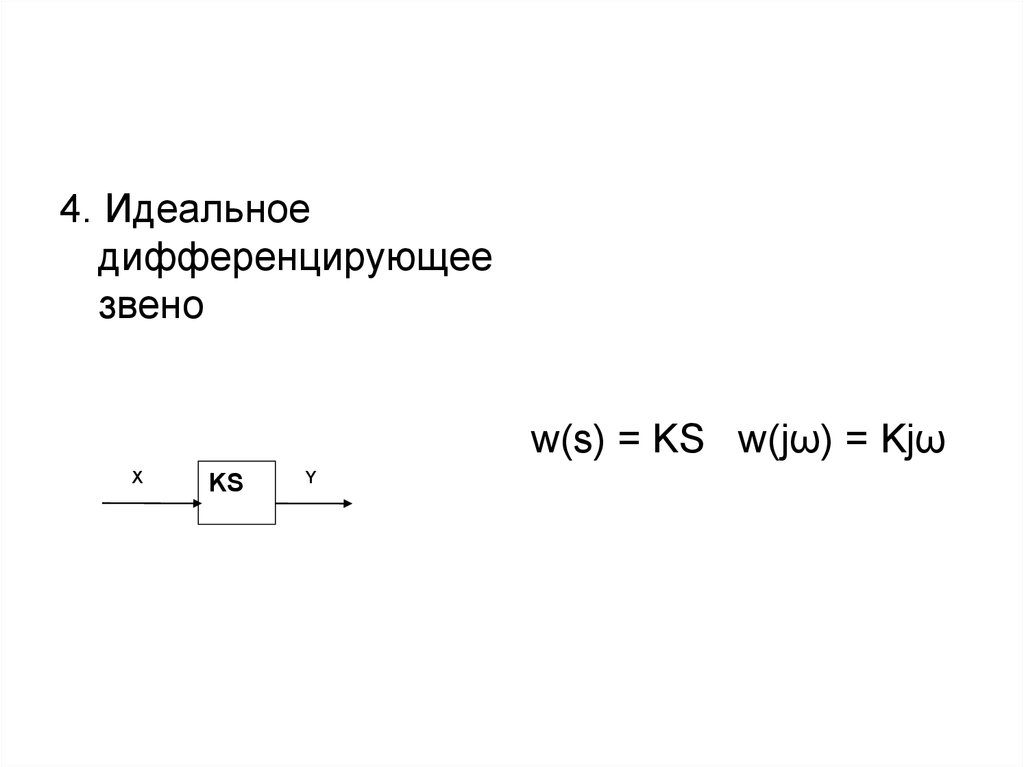
46.
4. Идеальноедифференцирующее
звено
w(s) = KS w(jω) = Kjω
X
KS
Y
47. АФЧХ и АЧХ
ImA(ω)
∞
ω
0
ω3
ω2
ω1
A(ω) = Kω
φ(ω) = +900
Re
ω
48. Логарифмические частотные характеристики
ЛАЧХЛФЧХ
φ(ω)
L(ω)=20lgK + 20lgω
60
+900
40
20
1
+20dδ
ω
ω
0,1
10
100
1
K
1
10
100
49. Правила преобразования структурных схем
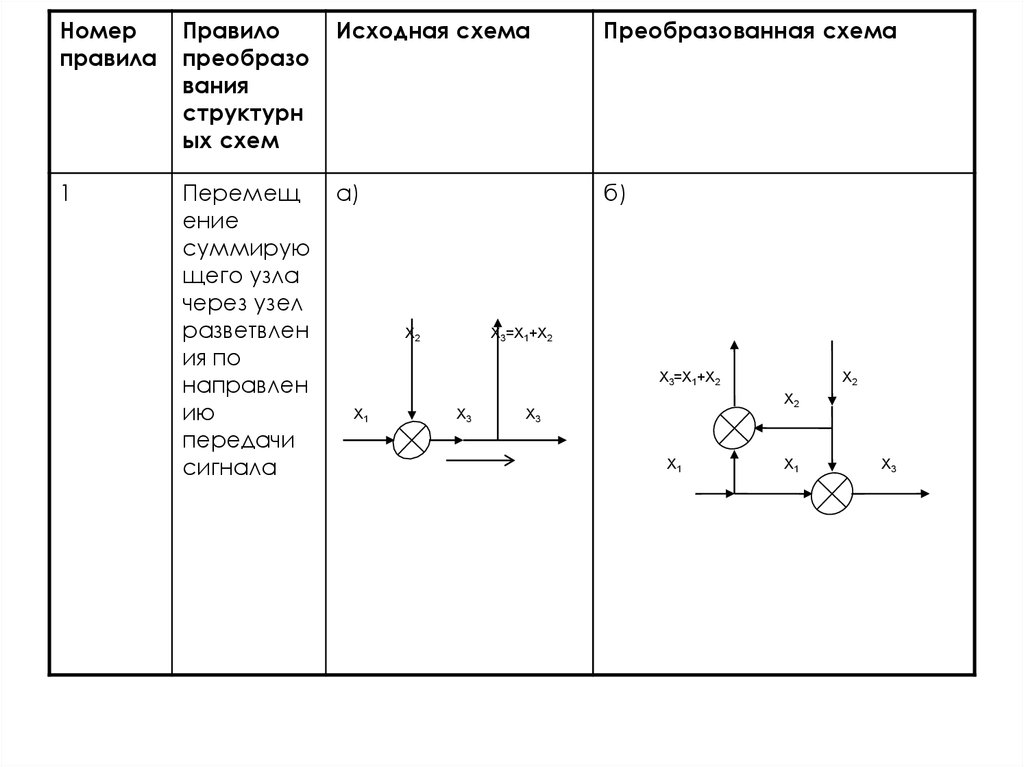
50.
Номерправила
Правило
преобразо
вания
структурн
ых схем
Исходная схема
Преобразованная схема
1
Перемещ
ение
суммирую
щего узла
через узел
разветвлен
ия по
направлен
ию
передачи
сигнала
а)
б)
X2
X3=X1+X2
X3=X1+X2
X1
X3
X2
X2
X3
X1
X1
X3
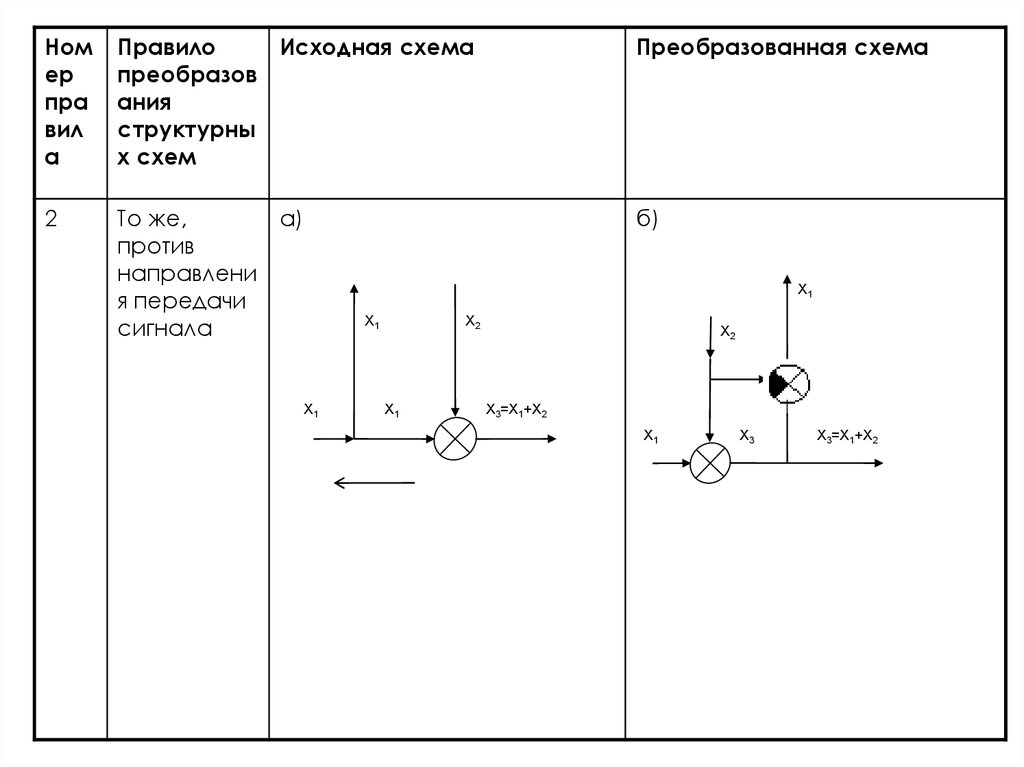
51.
Номер
пра
вил
а
Правило
Исходная схема
преобразов
ания
структурны
х схем
Преобразованная схема
2
То же,
а)
против
направлени
я передачи
сигнала
б)
X1
X1
X1
X2
X1
X2
X3=X1+X2
X1
X3
X3=X1+X2
52.
Номер
прав
ила
Правило
преобраз
ования
структур
ных схем
Исходная схема
Преобразованная схема
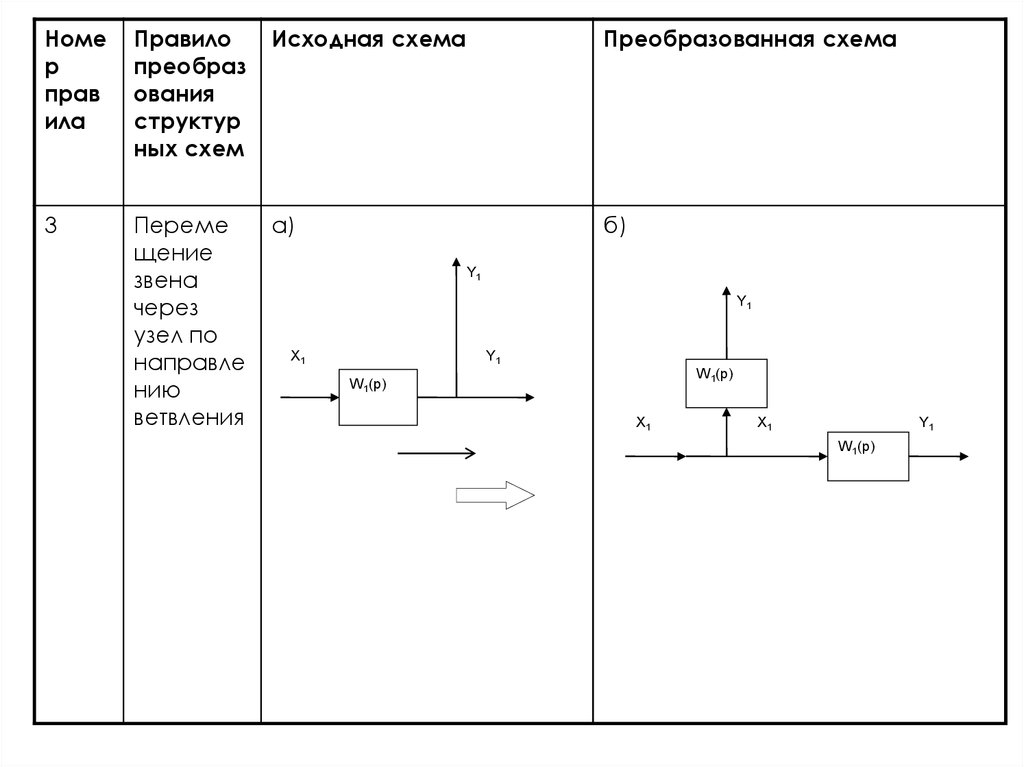
3
Переме
щение
звена
через
узел по
направле
нию
ветвления
а)
б)
Y1
Y1
X1
Y1
W 1(p)
W 1(p)
X1
X1
Y1
W 1(p)
53.
Номер
прав
ила
Правило
преобраз
ования
структурн
ых схем
Исходная схема
Преобразованная схема
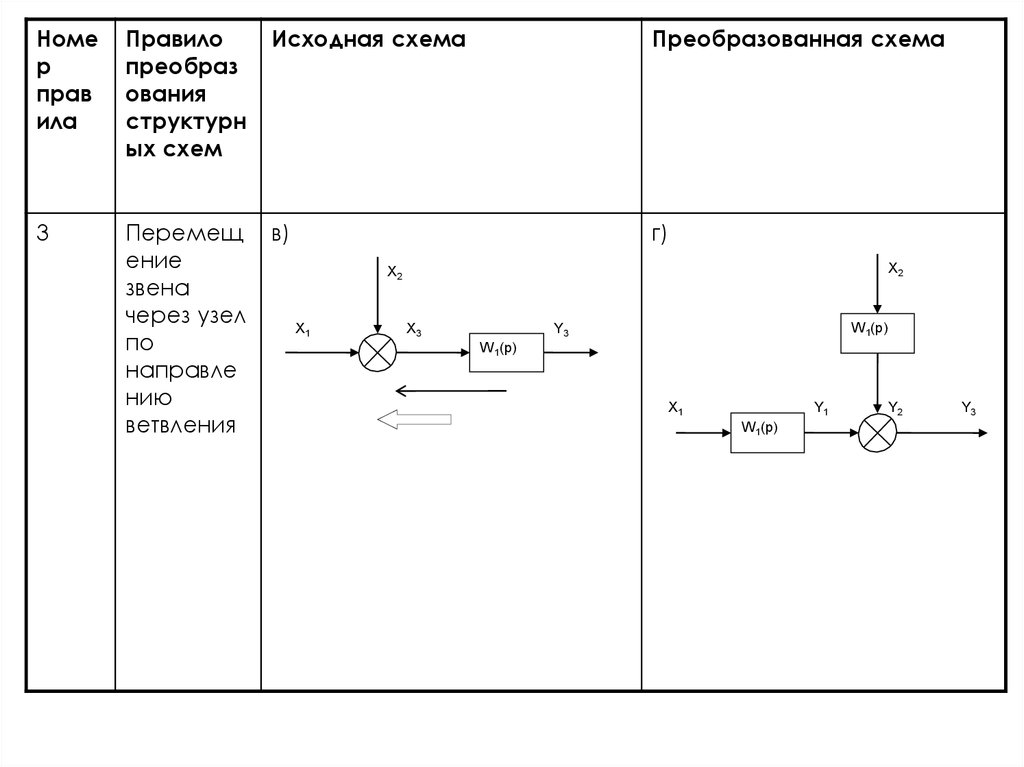
3
Перемещ
ение
звена
через узел
по
направле
нию
ветвления
в)
г)
X2
X2
X1
X3
W 1(p)
Y3
W 1(p)
X1
Y1
W 1(p)
Y2
Y3
54.
Номер
прави
ла
Правило
преобраз
ования
структур
ных схем
Исходная схема
Преобразованная схема
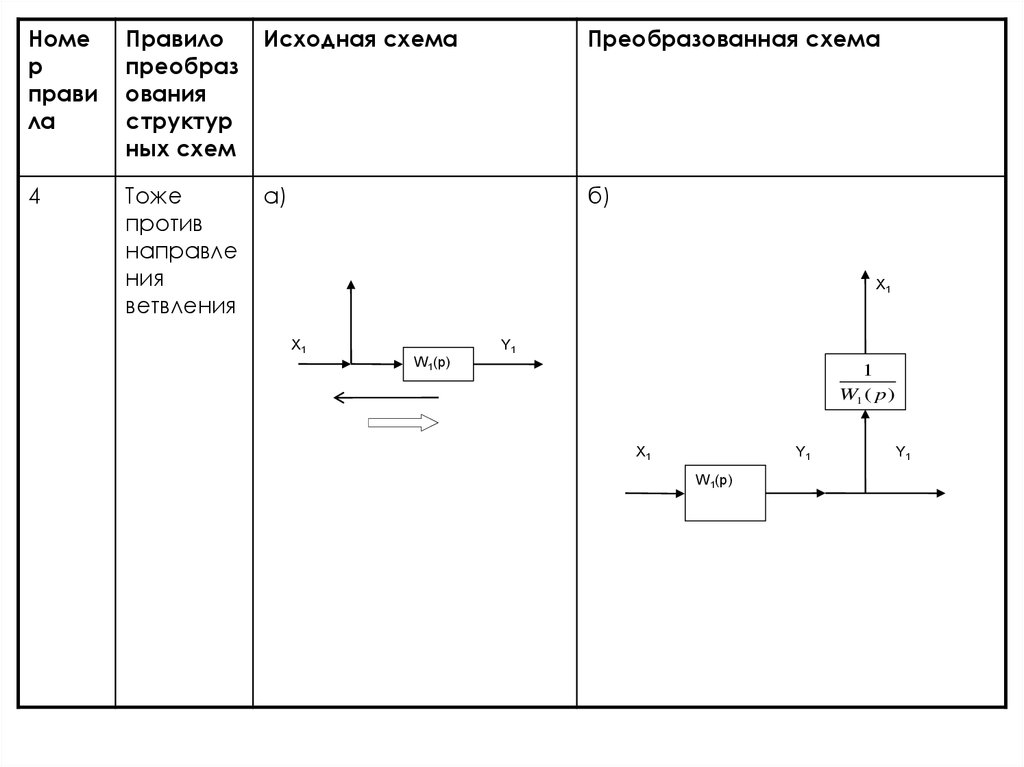
4
Тоже
против
направле
ния
ветвления
а)
б)
X1
X1
Y1
W 1(p)
1
W1 ( p )
X1
Y1
W 1(p)
Y1
55.
Номер
прави
ла
Правило
преобраз
ования
структур
ных схем
Исходная схема
Преобразованная схема
4
Тоже
против
направле
ния
ветвления
в)
г)
Y2
X1
W 1(p)
Y1
Y3=Y1+Y2
Y2
1
W1 ( p )
X2
W 1(p)
X1
X3
Y3
56.
Номер
прави
ла
Правило
преобраз
ования
структурн
ых схем
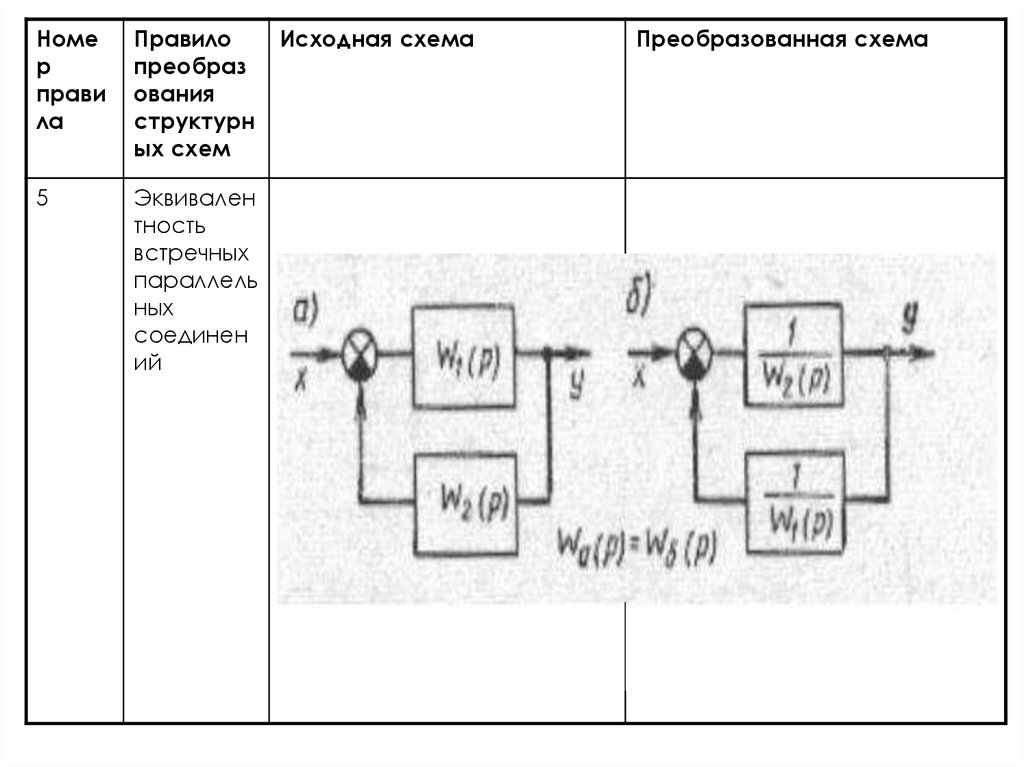
5
Эквивален
тность
встречных
параллель
ных
соединен
ий
Исходная схема
Преобразованная схема
57.
Номер
прави
ла
Правило
преобраз
ования
структурн
ых схем
Исходная схема
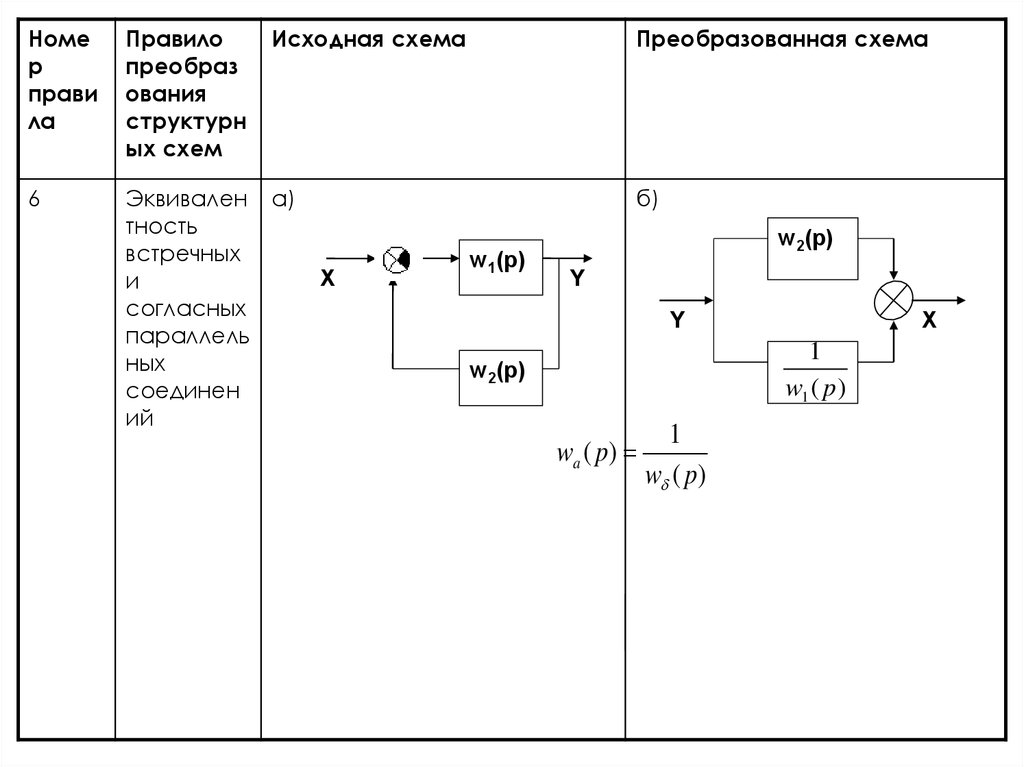
6
Эквивален а)
тность
встречных
и
согласных
параллель
ных
соединен
ий
Преобразованная схема
б)
X
w1(p)
w2(p)
Y
Y
X
1
w1 ( p )
w2(p)
1
wa ( p)
w ( p)
58.
Номер
прави
ла
Правило
преобраз
ования
структурн
ых схем
Исходная схема
Преобразованная схема
7
Эквивален
тность
последов
ательных
соединен
ий
а)
б)
X
w1(p)
w2(p)
w2(p)
Y
X
w а = wδ
w1(p)
Y
59. 7. Критерии качества САУ
I.II. Быстродействие
Устойчивость
σ%, tс, tp, m
Запасы устойчивости
по фазе, по амплитуде
Критерии
качества САУ
III. Точность при
-х(t) = const
- x(t) = a * t
- x(t) = xm * sinωt
IV. Интегральные
(t ) * dt min
0