




 и установить такие")



 electronics
electronicsSimilar presentations:










Настройка регуляторов
1. Автоматизация технологических процессов
Модуль 2. Лекция 4. Настройка регуляторов2. План
1.2.
Настройка регуляторов непрерывного
действия
Настройка регуляторов дискретного
действия
18.12.2019
АТП Кафедра АСУП БГАТУ
2
3. Наладка регуляторов непрерывного действия
П-регуляторИ-регулятор
хвых k xвх
k
хвых xвхdt
Tи k
W ( P)
Tи P
W ( P) k
ПИ-регулятор
k
хвых k xвх xвхdt
Tи
k
W ( P) k
Tи P
18.12.2019
ПИД-регулятор
dxвх
k
хвых k xвх х dt k Tд
Tи вх
dt
k
W ( P) k
k Tд P
Tи P
АТП Кафедра АСУП БГАТУ
3
4. Правильно налаженный регулятор должен обеспечивать оптимальное протекание процесса регулирования
ХвыхХ1
2
Хуст
Х2
tр
18.12.2019
t
АТП Кафедра АСУП БГАТУ
4
5. Параметры регуляторов принято настраивать на один из трех типовых переходных процессов
Fmin x 2 dtАпериодический
переходной процесс
18.12.2019
Процесс с 20%
перерегулированием
АТП Кафедра АСУП БГАТУ
Процесс с
минимальной
площадью
отклонения
5
6. Задача наладки регуляторов заключается в том, чтобы применительно к данному объекту выбрать (рассчитать) и установить такие
Типрегулятора
Процесс регулирования
а
б
в
0.7 заключается
0.9в
Задача
наладки
регуляторов
0
.
3
k
k
П
p
p
kp
0
0
0
k
k
том, чтобы применительно
к 0данному объекту
0
k0
T
To
o
To
выбрать (рассчитать)
и установить
такие 1
1
1
И
k p параметры,
k p которые
kp
настроечные
обеспечили
4.5k0T0
1.7 k0T0
1.7 k0 0 бы
процесс регулирования,
близкий
к оптимальному
0 .6
0.7
1
k
k
k
ПИ
k
k
k
p
p
p
0
0
0
0
0
kp
0.95
k0
0
Tи 0.3T0 0
kp
1.2
k0
0
0
18.12.2019
0
0
Tи 0.5T0 0.8 0
ПИД
0
0
0
Tи 0.35T0 0
kp
1.4
k0
0
0
Tи 2.4 0
Tи 2 0
Tи 1.3 0
Tд 0.4 0
Tд 0.4 0
Tд 0.5 0
АТП Кафедра АСУП БГАТУ
6
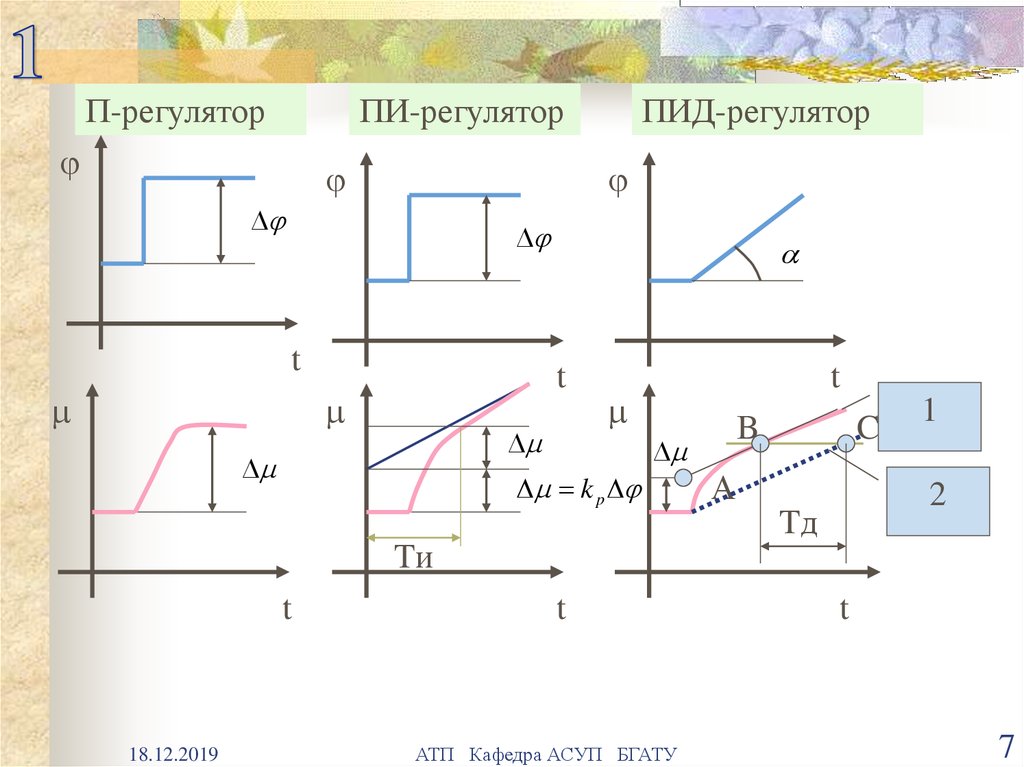
7.
П-регуляторПИ-регулятор
ПИД-регулятор
t
t
t
B
k p
C
А
1
2
Tд
Tи
t
18.12.2019
t
АТП Кафедра АСУП БГАТУ
t
7
8. Наладка релейных регуляторов
Если имеется астатическийобъект:
k
Wоу
-а
а
С
Статическая характеристика
релейного элемента
18.12.2019
Ta P
Для положительного
входного воздействия:
хв ых
-С
a
ka
xв хt
Ta
Для отрицательного
входного воздействия:
хв ых
ka
xв хt
Ta
АТП Кафедра АСУП БГАТУ
8
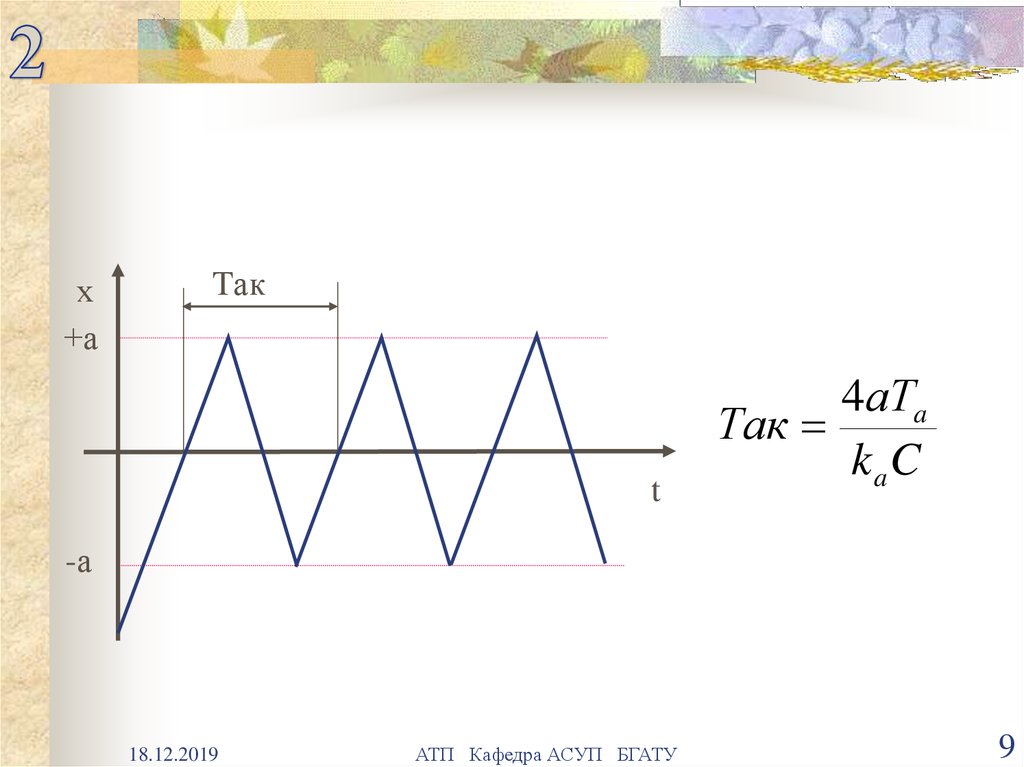
9.
х+а
Tак
t
4аTa
Так
kaC
-а
18.12.2019
АТП Кафедра АСУП БГАТУ
9
10.
При наличии запаздывания:k1, 2 1, 2 p
Wоу
e
T1, 2 P
Tак
х
+а
С k1 1 k 2 2
Аак а (
)
2 T1
T2
Когда
k1 k 2 , 1 2 , T1 T2
Ck
Aак a
T
2Аак
В _ общем _ случае :
tТак 2а k1T2 T1k 2
1
2
-а
k1k 2C
1
2
В _ частном _ случае :
Так
18.12.2019
АТП Кафедра АСУП БГАТУ
4аT
kC
2
10
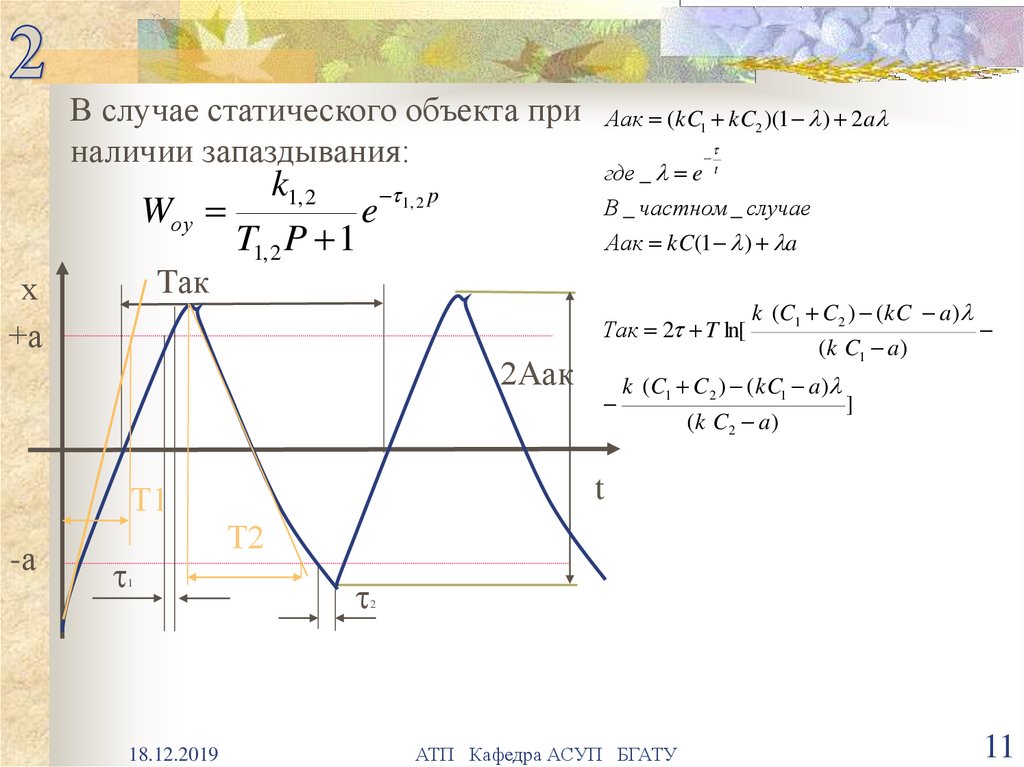
11.
В случае статического объекта приналичии запаздывания:
k1, 2
1, 2 p
Wоу
e
T1, 2 P 1
где _ e
t
В _ частном _ случае
Aак kC(1 ) a
Tак
х
+а
Так 2 T ln[
2Аак
Т1
-а
Аак (kC1 kC2 )(1 ) 2a
1
18.12.2019
k (C1 C2 ) (kC a )
(k C1 a )
k (C1 C2 ) (kC1 a)
( k C2 a )
]
t
Т2
2
АТП Кафедра АСУП БГАТУ
11
12. При наладке релейных регуляторов чаще всего бывает необходимо изменить частоту и амплитуду автоколебаний
Изменяют зону нечувствительностирелейного элемента;
Изменяют значение притока и оттока
управляющего воздействия;
Вводят динамические элементы в схему
регулятора
18.12.2019
АТП Кафедра АСУП БГАТУ
12