









")
")
")
")
")












 mathematics
mathematicsSimilar presentations:







")
. Матрицы. Определители. Матрицы")
")
К практической работе № 2 МИМНИ
1. К ПРАКТИЧЕСКОЙ РАБОТЕ № 2 МИМНИ
2. ЭКВИВАЛЕНТНАЯ СХЕМА ДЛЯ МОДЕЛИРОВАНИЯ ЗАКОНОМЕРНОСТЕЙ ДВИЖЕНИЯ УЖА
3. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ МИНИМИЗАЦИИ ЭНЕРГОЗАТРАТ ПРИ ВОЛНООБРАЗНОМ ДВИЖЕНИИ УЖА
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ МИНИМИЗАЦИИЭНЕРГОЗАТРАТ ПРИ ВОЛНООБРАЗНОМ
ДВИЖЕНИИ
=1.
УЖА
M1 1 M 2 2
= 1.
4. РАСЧЕТНАЯ СХЕМА ДЛЯ МОДЕЛИРОВАНИЯ ЗАКОНОМЕРНОСТЕЙ ДВИЖЕНИЯ УЖА
5. РАСЧЕТНАЯ СХЕМА МОДЕЛИРОВАНИЕ ОПТИМАЛЬНОГО СКЛАДЫВАНИЯ ШАРНИРНО – СОЧЛЕНЕННОГО КОЛЕСНОГО ШАССИ
6. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ
Ес = Е1 + Е2E1 M1 1 M 2 2
E2 0,5 J1 ( 1 ) 2 J 2 ( 2 ) 2
min Ec = min (E1 + E2) = min E1 + min E2
2 = К
2
1
Kc
2
с 1
1
1
1
t
Kc
E1
M 1 M 2 K c 0
1
Kc 2
1
E1 M 1
M2 0
2 K c
Ec
J
M 1 12 1 0
1
t
2
2
E
J
t
c
M 2 2 2 2 0
2
t
M1
M2
7.
J1 12 M1
J1
0
J1
2
Kc
Kc
t
1 M 2
J2
J2
J 2 K c 1
M2
0
t2
2
2
2
2
2
dE
J
Kc
M
J
c
2
1
1
2
1
2
J1 2 J 2 1 K c
M1 2
M
2 1
2
dK
Ec
M 2 1K c 0,5 2 2
K
K c3t 2
t2
2
c
c
M1
Kc
Kc t
t
dEc
J
J
M 2 1 M 2 1 2 2 0
dK c
Kc t
K ct
2
2
2
2
2
2
d 2 Ec 2M 1 2 3J1 22 J 2 12
42 2
2
3
dK c
Kc
Kc t
t
d 2 Ec
0
2
dK c
M2 a
M1 A
H
M 20
a A
M 10H
H
0
H
0
dA0 = δ da0
M 20 dM 20
a da0
0
M 10 dM 20 A0 dA0
2dA0(M20 + dM20) = dM20(A0 – a0δ)
8.
dA0
da0 S
H
3M 20 M 20
А0 A (
)
2M 20
H
0
A A0 exp
(
M2
) t
M1 M 2
A0 M 20
а0
M 10
AM 2
а
M1
I 2
2
J
m
(
l
J 20
M
I
10
1 1 )
2
l2
(
)
2
M1
m2
m2
Изложенные теоретические предпосылки легли в основу технического решения,
признанного изобретением (“Трелевочно – транспортная машина”, по заявке
4942046/11, МКИ5 В60Р3/40).
9. Реальные объекты моделирования
БелАЗ — 755710. Реальные объекты моделирования
11. Реальные объекты моделирования (BELL - B60E)
12. Реальные объекты моделирования (BELL - B60E)
13. Реальные объекты моделирования (VOLVO-A25C)
14. Реальные объекты моделирования (VOLVO-A25C)
15. Реальные объекты моделирования (“Кировец” K – 708.2)
16. РАСЧЕТНАЯ СХЕМА МАНЕВРА СКИДЕРА
17.
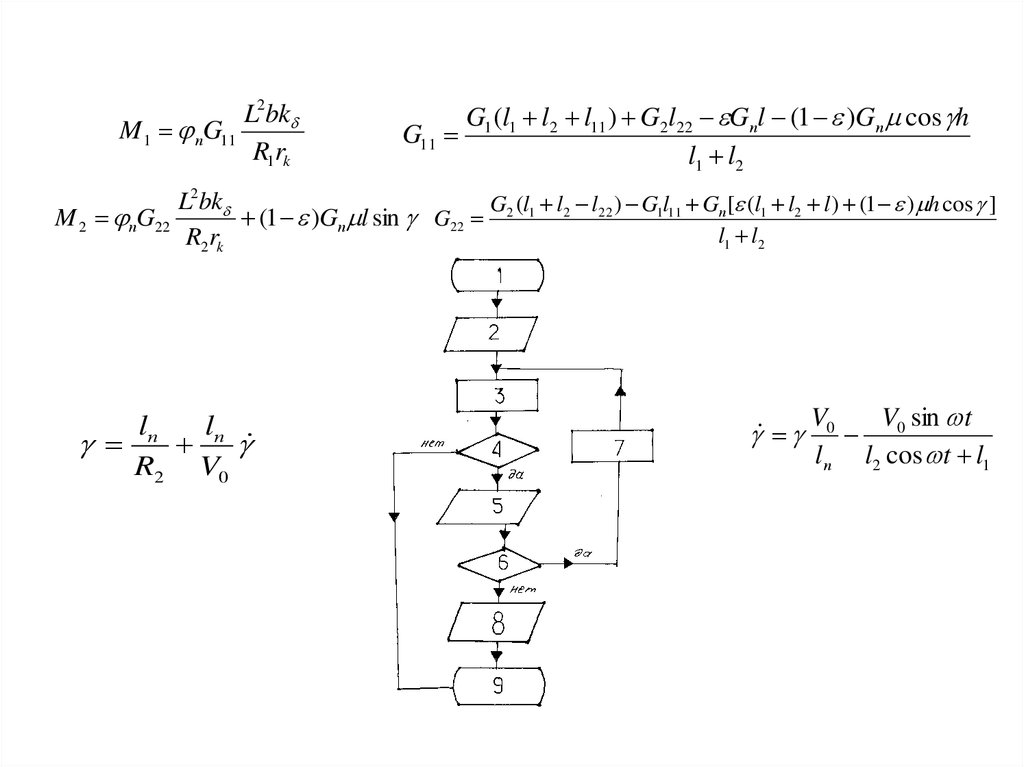
L2bkM 1 пG11
R1rk
G11
G1 (l1 l2 l11 ) G2l22 Gпl (1 )Gп cos h
l1 l2
L2bk
G (l l l ) G1l11 Gп [ (l1 l2 l ) (1 ) h cos ]
M 2 пG22
(1 )Gп l sin G22 2 1 2 22
l1 l2
R2 rk
l
l
п п
R2 V0
V0
V sin t
0
lп l2 cos t l1
18. Реальные объекты моделирования
19. Простейшая интерпретация технического решения
20. Простейшая интерпретация технического решения
21. Блок – схема микропроцессорной системы оптимального управления гидравлическим механизмом складывания полурам шасси колесной
машины22. Пример компоновочной схемы гидромеханизма поворота сочлененного колесного шасси
23. ОЦЕНКА ЭНЕРГОЭФФЕКТИВНОСТИ МАНЕВРА
4 f n L2 n Bк б G1G2(l1 l2 )(G1 G2 )
En
ln
Dк (G2l1 G1l2 ) G1 (l2 cos n l1 ) G2 (l1 cos n l2 )
G1l12 12
Eпк
gt n2
24. 1 – ЕБС; 2 - Епс
ОЦЕНКА ЭНЕРГОЭФФЕКТИВНОСТИ МАНЕВРАЕс, Дж
1 – ЕБС; 2 - Епс
1
2
п, град
Теоретически установлено, что возможно оптимальное управление процессом
складывания полурам при повороте шарнирно-сочлененного транспортноготехнологического шасси. Энергозатраты при этом в среднем на 68% меньше по
- сравнению с известными исполнительными устройствами осуществления
аналогичного процесса.
25. Пример управления гидромеханизмом
В сторону гидроцилиндраВ сторону противоположную
гидроцилиндру
26. Пример управления гидромеханизмом
В сторону гидроцилиндраВ сторону противоположную
гидроцилиндру
Т2, м
1,3
1,2
1,1
1
gp = 0
0,9
gp = 15000 H
0,8
gp = 30000 H
0,7
gp = 45000 H
0,6
gp = 60000 H
0,5
0,4
0,3
0
4
8
12
16
20
24
V, град