








 Если известны два частных решения системы линейных дифференциальных уравнений и то тоже является решением системы.")





 mathematics
mathematicsSimilar presentations:







")

")
Системы дифференциальных уравнений. (Лекция 2.13)
1. Лекция 2-13. 12.4. Системы дифференциальных уравнений. 12.4.1. Общие определения. Нормальные системы дифференциальных уравнений.
Существуют процессы, где одной функциинедостаточно для описания процесса. Далее
t - независимая переменная;
x1 ( t ) ,..., xn ( t ) (или x ( t ) , y ( t ) , z ( t ) если функций не
больше трех) - неизвестные функции.
Определение. Системой дифференциальных уравнений
называют совокупность уравнений, в каждое из
которых входят независимые переменные, искомые
функции и их производные.
2. Примеры.
1){
x¢ = 2 x + y + t + 1,
y¢ = 3 x - 4 y + 6t.
2)
ìïtx1¢¢ + 3 x2¢ - 2 x1x3 = 0,
í2 x2¢¢ + x3¢¢ - 2tx1 = 0,
ïî x3¢ + 2 x1 + tx2 = 0.
Решением системы дифференциальных уравнений
называют совокупность функций x1 = x1 ( t ) ,..., xn = xn ( t ) ,
которая при подстановке в уравнения превращает их в
тождества.
Определение. Нормальной
ì x1¢ = f1 ( t , x1,..., xn ) ,
системой дифференциальных
ï
уравнений называется система í...............................
ïî xn¢ = f n ( t , x1,..., xn ) .
уравнений вида
3. Многие системы дифференциальных уравнений можно привести к нормальной системе.
• Пример.{
ì ¢ 1
x
=
3
x
2
y
+
2
t
,
(
)
ï
x¢ + 2 y¢ - x = 0, Þ
5
í
x¢ - 3 y¢ + y = t.
1
ï y¢ = ( x + y - t ) .
5
î
Некоторые системы дифференциальных уравнений
нельзя привести к нормальной системе. Их
рассматривать не будем.
• Пример.
x¢ + y¢ - tx = 0,
{ x¢ + y¢ + y = 0.
4. Система дифференциальных уравнений, содержащая производные высших порядков, может быть приведена к нормальной системе.
• Пример.x1¢¢ + tx2 = 0,
{ x¢¢ + 2x¢ - x = 0.
2
1
2
• Введем дополнительные функции
• Тогда
ì x1¢ = x3 ,
{
x1¢ = x3 ,
x2¢ = x4 .
ï x2¢ = x4 ,
í x¢ = -tx ,
ï x3¢ = x -2 2 x .
2
3
î 4
• Одно дифференциальное уравнение n - го порядка
может быть сведено к нормальной системе
дифференциальных уравнений. ì
x¢ = y,
¢¢¢
¢
¢¢
x
=
f
t
,
x
,
x
,
x
.
(
)
ï
• Пример.
y¢ = z ,
y = x¢, z = y¢ = x¢¢.
í
ïî z¢ = f ( t , x, y , z ) .
5. Нормальная система дифференциальных уравнений, обычно, может быть заменена одним дифференциальным уравнением, порядок которого равен чис
Нормальная система дифференциальныхуравнений, обычно, может быть заменена одним
дифференциальным уравнением, порядок которого
равен числу
системы.
= y,
ì x¢уравнений
x¢¢ = y¢ = z , x¢¢¢ = z¢ = x - y + z , Þ
ï
• Пример í y¢ = z ,
Þ x¢¢¢ = x - x¢ + x¢¢.
ïî z¢ = x - y + z.
(
)
r - r + r - 1 = r + 1 ( r - 1) = 0.
3
2
r1,2 = ±i, a = 0, b = 1, s = 1.
2
r3 = 1, a = 1, b = 0, s = 1.
x = C1et + C2 cos t + C3 sin t.
t
t
y = C1e - C2 sin t + C3 cos t , z = C1e - C2 cos t - C3 sin t.
6. Обратный случай, когда система дифференциальных уравнений не может быть сведена к одному дифференциальному уравнению.
ìï x¢ = x,• Пример
í y¢ = z ,
ïî z¢ = y.
• Первое уравнение не зависит от остальных.
x¢ = x, y¢¢ = z¢ = y.
y = C1et + C2e -t , z = y¢ = C1et - C2e -t , x = C3et .
7. Теорема.
Общее решение нормальной системыдифференциальных уравнений
ì x1¢ = f1 ( t , x1,..., xn ) ,
ì x1 = j1 ( t , C1,..., Cn ) ,
ï
ï
í............................... имеет вид í...............................
ïî xn¢ = f n ( t , x1,..., xn )
ïî xn = jn ( t , C1,..., Cn ) ,
где C1,..., Cn
- произвольные постоянные.
C1,..., Cn могут входить не во все уравнения.
Задание начальных условий x1 t =t = x10 ,..., xn t =t = xn0
0
дает частное решение системы дифференциальных
ìj1 ( t0 , C1 ,..., Cn ) = x10 ,
уравнений
ï
í...............................
ïîjn ( t0 , C1,..., Cn ) = xn 0 .
0
8. Теорема.
Если правые части нормальной системыдифференциальных уравнений непрерывны
вместе со своими частными производными в
окрестности значений t0 , x10 , x20 ,..., xn0 ,
то
в достаточно малом интервале [ t0 - h, t0 + h ]
существует единственная система функций
x1 ( t ) ,..., xn ( t ) ,
являющаяся решением
системы и удовлетворяющая начальным
условиям.
9. 12.4.2. Системы линейных дифференциальных уравнений.
Однородная система линейных дифференциальныхуравнений ì x1¢ = a11 ( t ) x1 + ... + a1n ( t ) xn ,
ï
í...............................
ïî xn¢ = an1 ( t ) x1 + ... + ann ( t ) xn ,
где aij ( t ) - непрерывные функции.
1) Если известно частное решение системы линейных
дифференциальных уравнений x11 ( t ) ,..., xn1 ( t ) ,
то C1x11 ( t ) ,..., C1xn1 ( t ) тоже является решением
системы, где C1
- произвольная постоянная.
10. 2) Если известны два частных решения системы линейных дифференциальных уравнений и то тоже является решением системы.
2) Если известны два частных решенияx11 ( t ) системы
,..., xn1 ( t )линейных
дифференциальных
x12 ( t ) ,..., xn 2 ( t ) , уравнений
x11 ( t ) + x12 ( t ) ,..., xn1 ( t ) + xn 2и( t )
то
тоже является решением системы.
• 3) Если известны n частных решений системы
x11 ( t ) ,..., xn1 ( t ) ; …; x1n ( t ) ,..., xnn ( t ) , то
ìï x1 = C1x11 + ... + Cn xn1,
í...................................
ïî xn = C1x1n + ... + Cn xnn
(*)
тоже является решением системы линейных
дифференциальных уравнений.
Совокупность n линейно независимых решений образует
фундаментальную систему решений.
Решение (*) является общим решением однородной
системы линейных дифференциальных уравнений.
11. Общее решение неоднородной системы линейных дифференциальных уравнений
ì x1¢ = a11 ( t ) x1 + ... + a1n ( t ) xn + b1 ( t ) ,ï
í...............................
ïî xn¢ = an1 ( t ) x1 + ... + ann ( t ) xn + bn ( t )
есть сумма общего решения однородной системы и
частного решения неоднородной системы.
12.
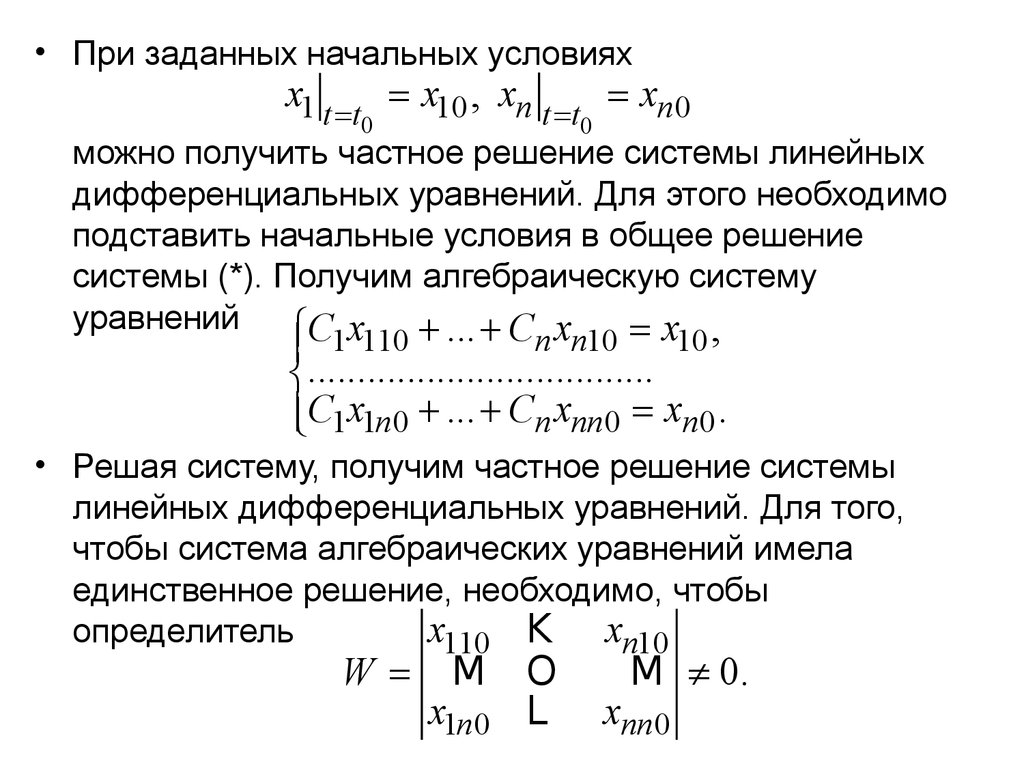
• При заданных начальных условияхx1 t =t = x10 , xn t =t = xn 0
0
0
можно получить частное решение системы линейных
дифференциальных уравнений. Для этого необходимо
подставить начальные условия в общее решение
системы (*). Получим алгебраическую систему
уравнений ìC x
+ ... + C x = x ,
n n10
10
ï 1 110
í...................................
ïîC1x1n0 + ... + Cn xnn0 = xn0 .
• Решая систему, получим частное решение системы
линейных дифференциальных уравнений. Для того,
чтобы система алгебраических уравнений имела
единственное решение, необходимо, чтобы
определитель
x110 K xn10
W=
M
O
x1n 0 L
M ¹ 0.
xnn0
13. 12.4.3. Системы линейных дифференциальных уравнений с постоянными коэффициентами.
Рассмотрим однородную систему линейныхдифференциальных уравнений
ìï x1¢ = a11x1 + ... + a1n xn ,
aij = const.
í...............................
ïî xn¢ = an1x1 + ... + ann xn ,
Систему можно свести к одному дифференциальному
уравнению n - го порядка. Будем искать частные
rt
rt
x
=
k
e
,...,
x
=
k
e
решения в виде 1
1
n
n ,
где k1,..., kn , r - неопределенные постоянные.
14. Дифференцируя, получим
ì k1re rt = a11k1e rt + ... + a1n kne rt ,ï
Дифференцируя, получим í...............................
ïî kn re rt = an1k1e rt + ... + ann kne rt .
ì( a11 - r ) k1 + ... + a1n kn = 0,
ï
• Отсюда
í...............................
ïîan1k1 + ... + ( ann - r ) kn = 0.
Чтобы система однородных уравнений имела
ненулевое решение, необходимо и достаточно,
определитель системы равнялся нулю
( a11 - r )
M
an1
K
O
L
a1n
M = 0.
( ann - r )
• Раскрыв определитель, получим характеристическое
уравнение.
15. Предположим, что корни действительные и простые. Рассмотрим решение на примере системы трех уравнений. Пусть корень равен
Предположим, что корни действительные и простые.Рассмотрим решение на примере
ì( a11 - r1системы
) k1 + a12kтрех
2 + aуравнений.
13k3 = 0,
Пусть корень равен
r1
ï
ía21k1 + ( a22 - r1 ) k2 + a23k3 = 0,
ïîa31k1 + a32k2 + ( a33 - r1 ) k3 = 0.
• Определитель системы равен нулю. Примем, что если r1
- простой корень, то, по крайней мере, один из миноров
2-го порядка не равен нулю. Тогда одно из уравнений
следует из остальных. Решение системы зависит от
одной произвольной постоянной.
Пусть первые два уравнения линейно независимы.
Тогда одно из решений будет
1)
1)
a12 C1
C1 a22 - r1 ( 1) a11 - r1 a12
(
(
k1 =
, k =
, k3 =
.
a22 - r1 C2 2
C2 a12
a21 a22 - r1
• Все остальные решения получаются умножением чисел
1)
1)
1)
(
(
(
k1 , k2 , k3 на одну и ту же произвольную постоянную.
16. Поступая так со всеми корнями характеристического уравнения, найдем три системы функций, каждая из которых является решением системы лине
Поступая так со всеми корнями характеристическогоуравнения, найдем три системы функций, каждая из
которых является решением системы линейных
дифференциальных уравнений
1) r1t
1) r1t
1) r1t
(
(
(
k1 e , k2 e , k3 e ;
2 ) r2t
2 ) r2t
2 ) r2t
(
(
(
k e , k e , k e ;
1
2
3) r3t
3) r3t
(
(
k1 e , k2 e ,
3
3) r3t
(
k3 e .
Общее решение системы линейных
дифференциальных уравнений имеет вид
1) r1t
2 ) r2t
3) r3t
(
(
(
x1 = C1k1 e + C2k1 e + C3k1 e ,
1) r1t
2 ) r2t
3) r3t
(
(
(
x2 = C1k2 e + C2k2 e + C3k2 e ,
1) r1t
2 ) r2t
3) r3t
(
(
(
x =C k e +C k e +C k e .
3
1 3
2 3
3 3