










 physics
physicsSimilar presentations:





")




Радиовысотомеры
1. РАДИОВЫСОТОМЕРЫ
2. 1. Отражение радиосигналов от земной и морской поверхности. Расчет мощности отраженного сигнала
3. 1.1. Критерий шероховатости поверхности
ГладкаяШероховатая
h cos 8
h cos 8
0 , h
см
РВ – системы, работающие
в дециметровом и более длинноволновом диапазоне волн.
РВ – системы, работающие
в сантиметровом диапазоне длин
волн.
Бетонированная взлетнопосадочная полоса аэродрома,
спокойная поверхность водоема,
ровные участки пустыни и т.д.
Морская поверхность при
волнении, овраги, холмы,
лесистую местность и т.д.
4.
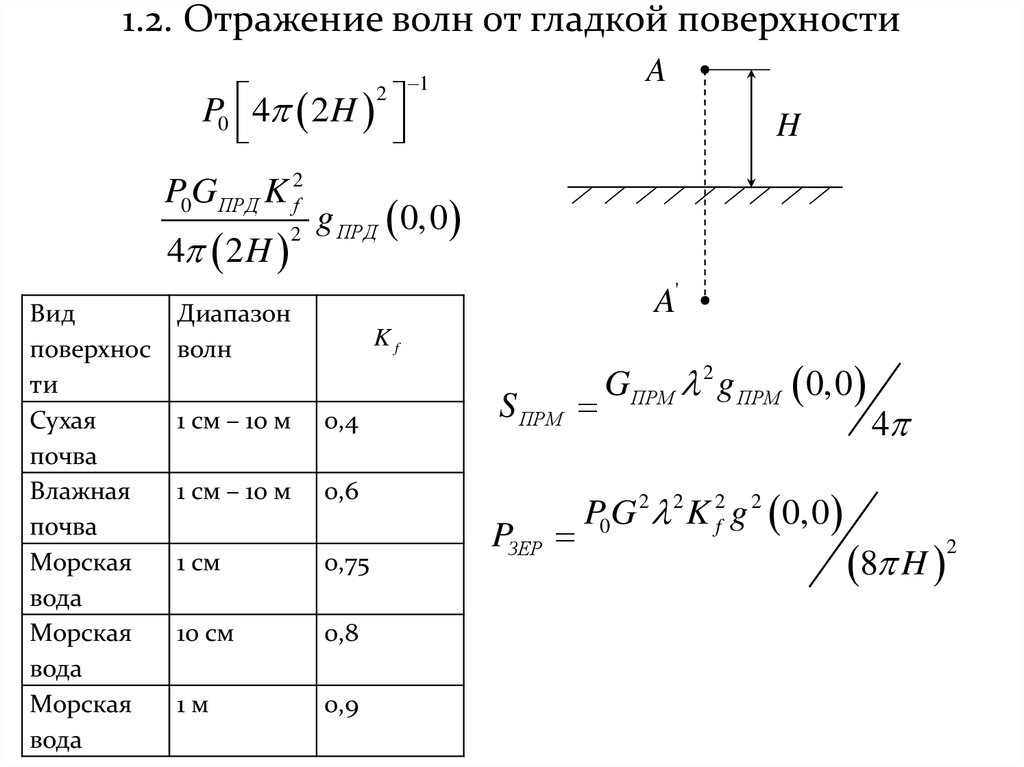
1.2. Отражение волн от гладкой поверхностиP0 4 2 H
2
P0GПРД K 2f
4 2 H
Вид
поверхнос
ти
Сухая
почва
Влажная
почва
Морская
вода
Морская
вода
Морская
вода
2
A
1
H
g ПРД 0,0
A'
Диапазон
волн
Kf
1 см – 10 м
0,4
1 см – 10 м
0,6
1 см
0,75
10 см
0,8
1м
0,9
S ПРМ
PЗЕР
GПРМ 2 g ПРМ 0,0
P0G 2 2 K 2f g 2 0,0
4
8 H
2
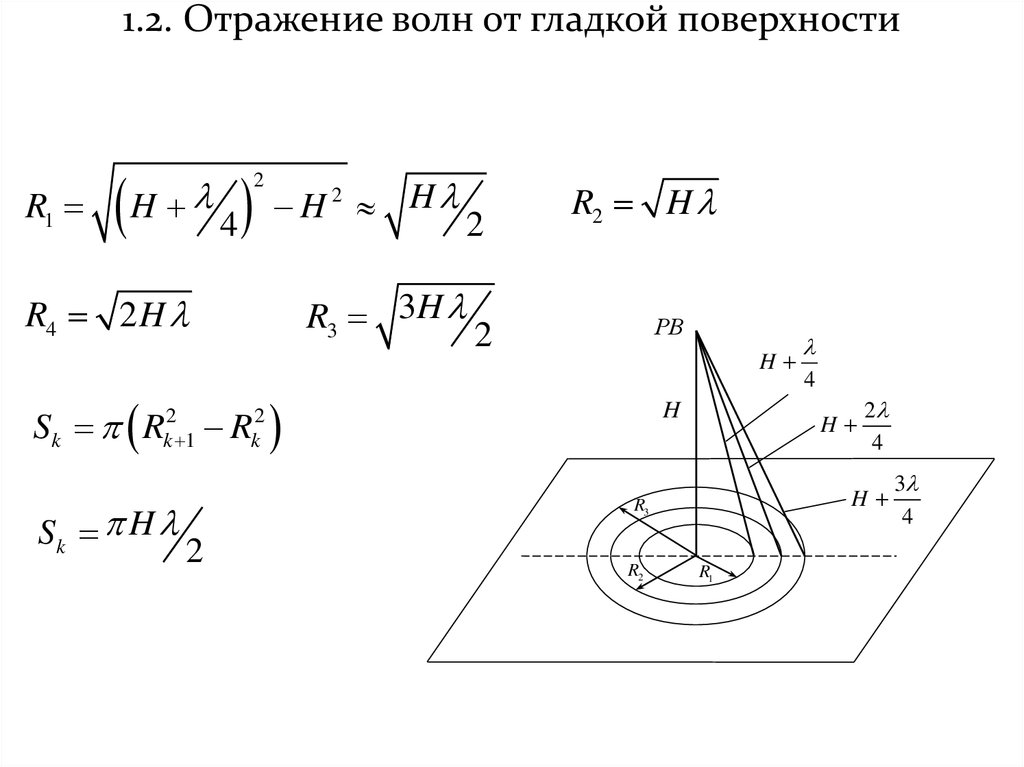
5.
1.2. Отражение волн от гладкой поверхностиR1
H
4
2
H 2 H
R3 3H
R4 2 H
Sk R
2
k 1
Sk H
2
R
2
k
R2 H
РВ
2
H
H
R2
4
H
2
4
H
R3
2
R1
3
4
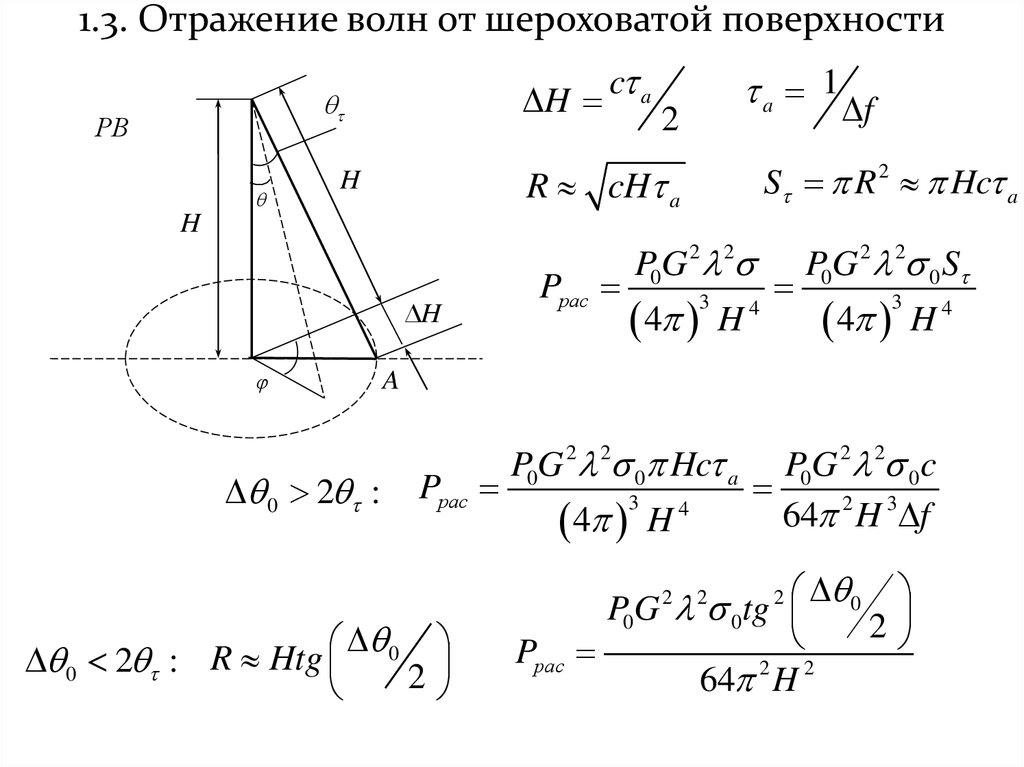
6.
1.3. Отражение волн от шероховатой поверхностиH
РВ
c a
H
H
0 2 :
2
S R 2 Hc a
R cH a
H
a 1 f
Pрас
P0G 2 2
4
3
H
4
P0G 2 2 0 S
4
3
H4
A
Pрас
0 2 : R Htg 0 2
P0G 2 2 0 Hc a
4
Pрас
3
H4
P0G 2 2 0c
64 2 H 3 f
P0G 2 2 0tg 2 0
2
64 2 H 2
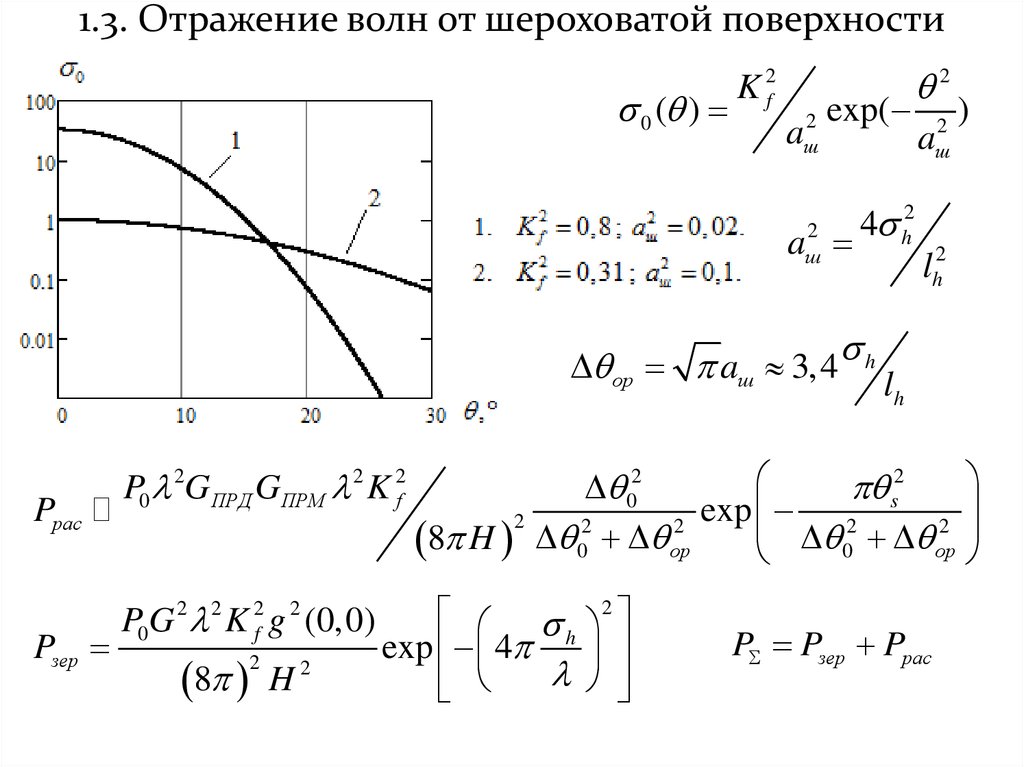
7.
1.3. Отражение волн от шероховатой поверхности0 ( )
K 2f
2
ш
a
exp(
a
2
ш
ор aш 3,4
Pрас
Pзер
P0 2GПРД GПРМ 2 K 2f
P0G 2 2 K 2f g 2 (0,0)
8
2
H
2
4 h2
h
2
2
ш
a
lh2
lh
02
s2
exp
2
2
2
8 H 0 ор 02 ор2
h 2
exp 4
)
P Pзер Pрас
8.
2. Принцип действия иосновные соотношения для
радиовысотомеров с частотной
модуляцией
9.
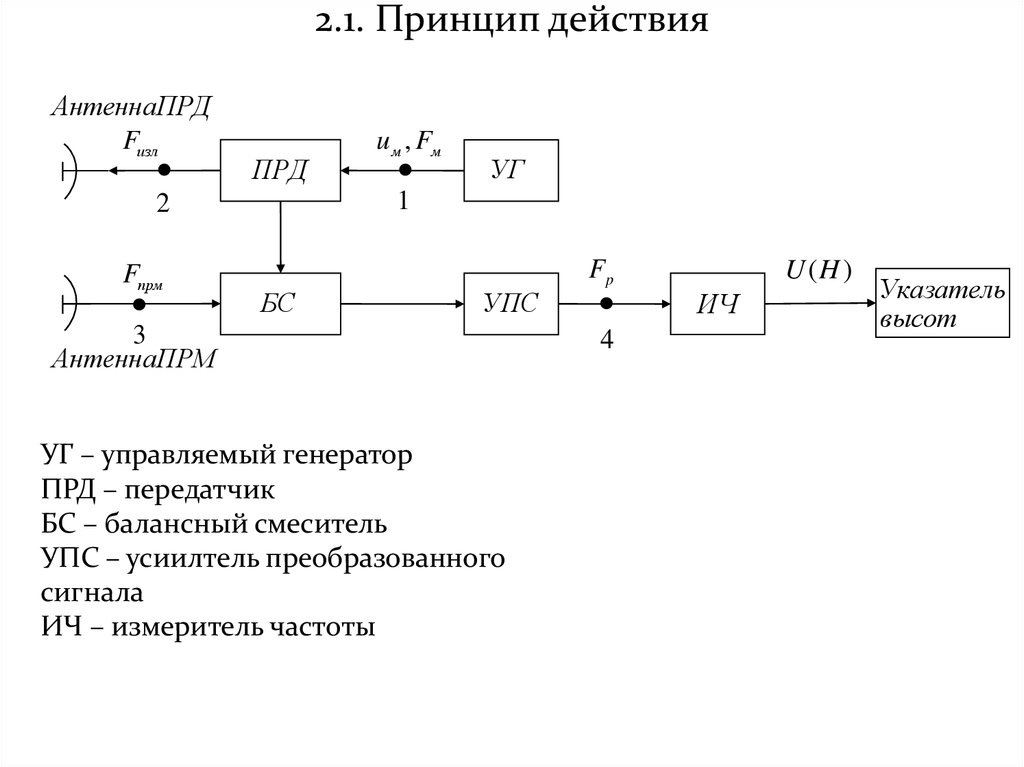
2.1. Принцип действияАнтеннаПРД
Fизл
ПРД
УГ
1
2
Fпрм
u м , Fм
БС
УПС
3
АнтеннаПРМ
УГ – управляемый генератор
ПРД – передатчик
БС – балансный смеситель
УПС – усиилтель преобразованного
сигнала
ИЧ – измеритель частоты
Fp
U (H )
ИЧ
4
Указатель
высот
10.
2.1. Принцип действия11.
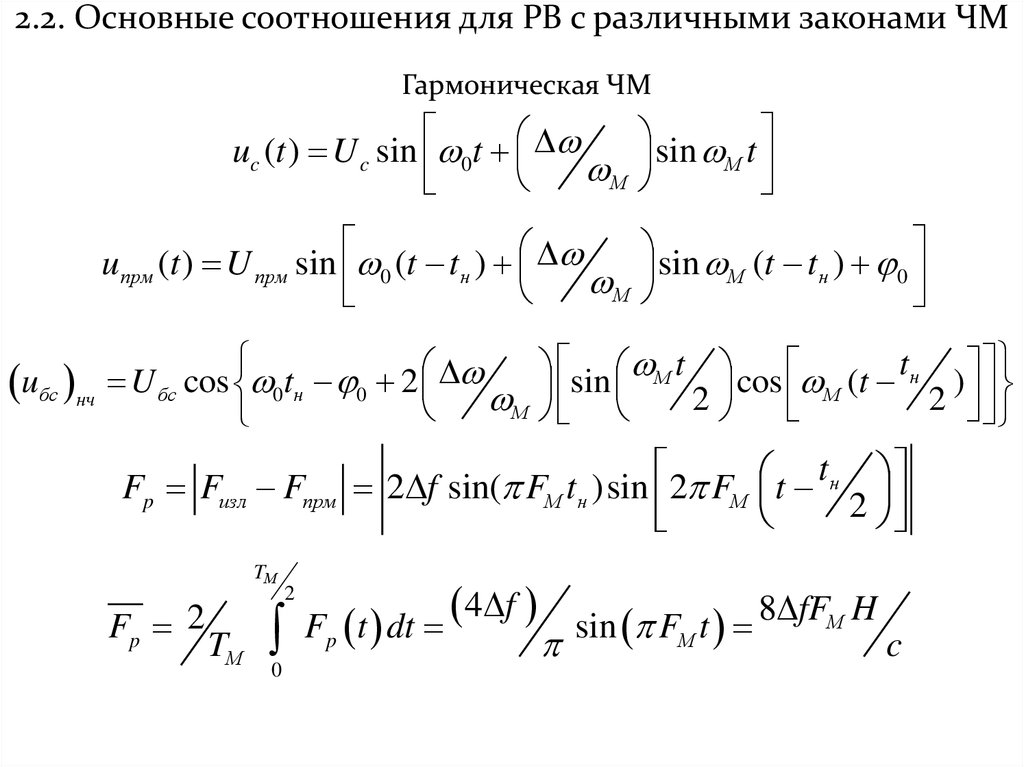
2.2. Основные соотношения для РВ с различными законами ЧМГармоническая ЧМ
uc (t ) U c sin 0t
М
uпрм (t ) U прм sin 0 (t tн )
М
uбс нч
U бс cos 0tн 0 2
М
sin t
М
sin (t t )
М
н
0
sin М t cos (t tн )
2
2
М
t
Fp Fизл Fпрм 2 f sin( FМ tн )sin 2 FМ t н
2
TМ
Fp 2
TМ
0
2
Fp t dt
4 f
sin FМ t
8 fFМ H
c
12.
2.2. Основные соотношения для РВ с различными законами ЧМuбс нч U бс cos T d cos М t ;
cos T d cos М t 0;
FИ
8 fFМ H
c
;
FИ NT FМ ;
NT 4d
H c
8 f
2
2 tн
8 fH
c
13.
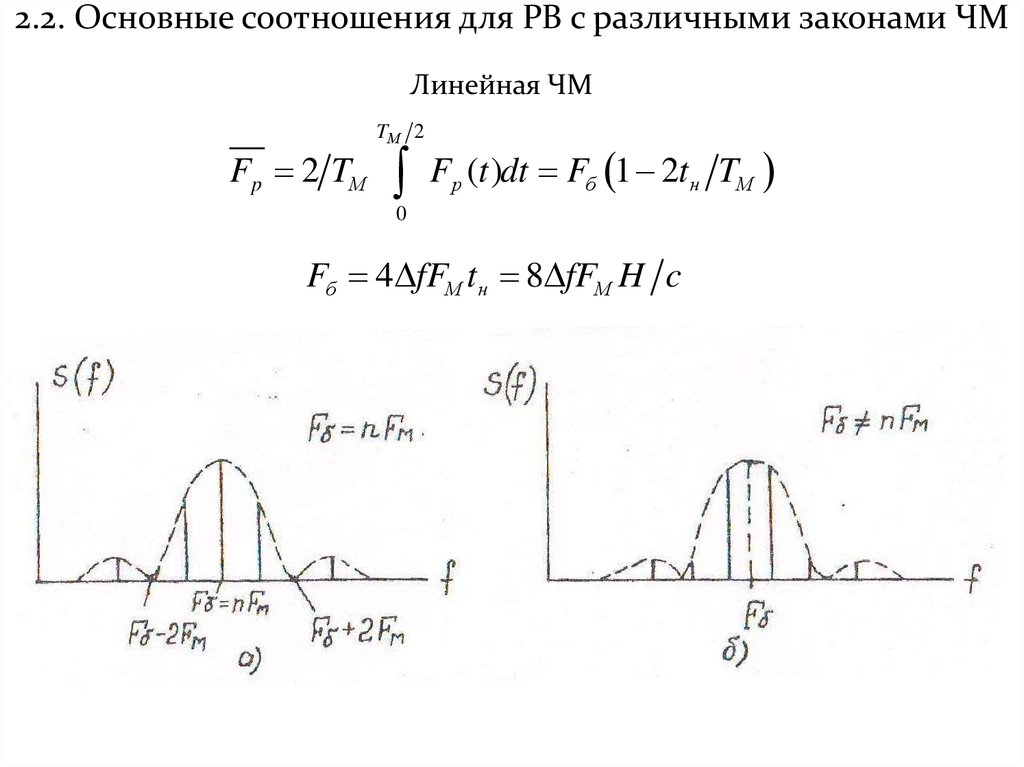
2.2. Основные соотношения для РВ с различными законами ЧМЛинейная ЧМ
Fp 2 TМ
TМ 2
Fp (t )dt Fб 1 2tн TМ
0
Fб 4 fFM tн 8 fFM H c
14.
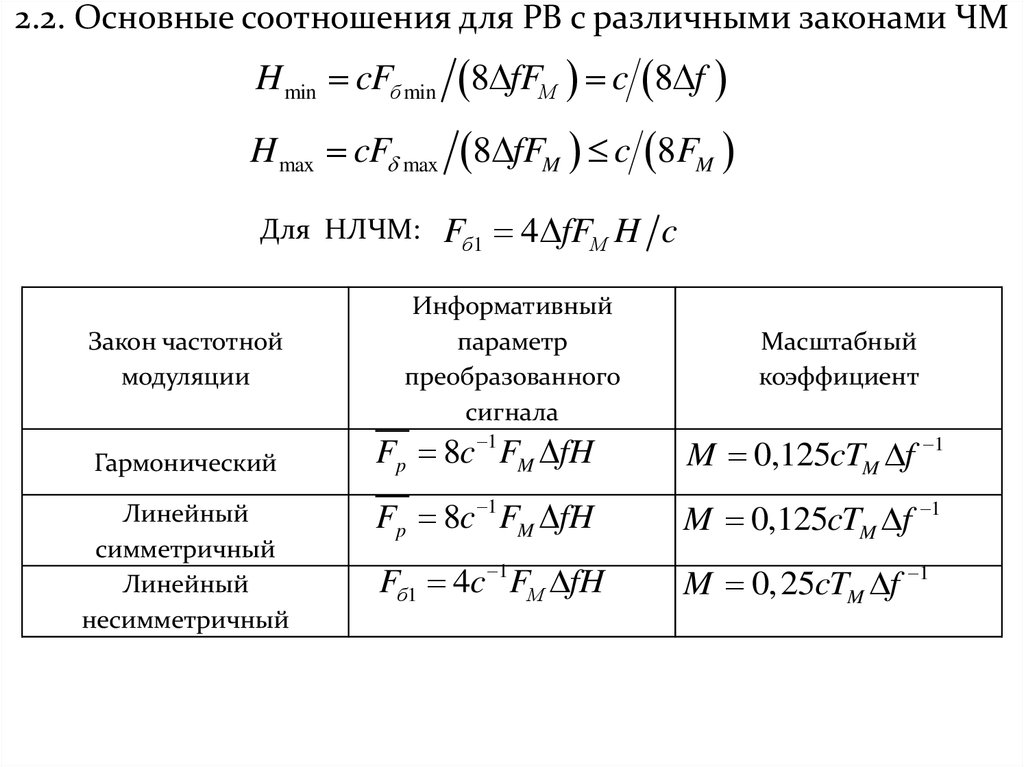
2.2. Основные соотношения для РВ с различными законами ЧМH min cFб min 8 fFM c 8 f
H max cF max 8 fFM c 8FM
Для НЛЧМ:
Закон частотной
модуляции
Гармонический
Линейный
симметричный
Линейный
несимметричный
Fб1 4 fFM H c
Информативный
параметр
преобразованного
сигнала
Масштабный
коэффициент
Fp 8c 1 FM fH
M 0,125cTM f 1
Fp 8c 1 FM fH
M 0,125cTM f 1
Fб1 4c 1FM fH
M 0, 25cTM f 1
15.
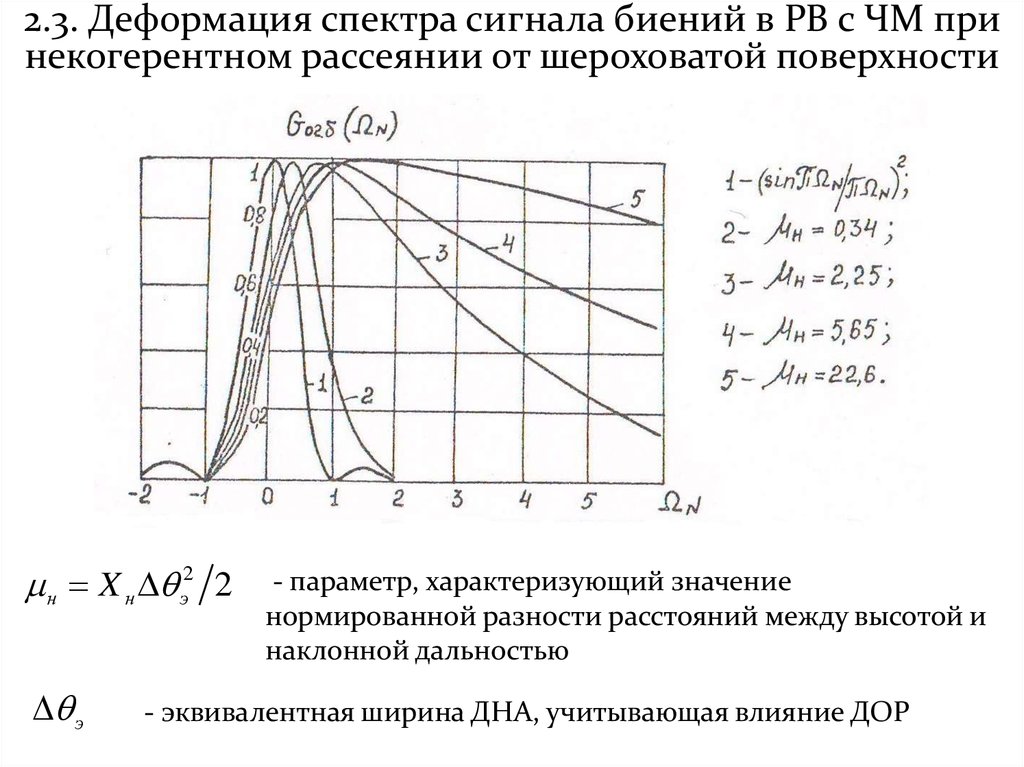
2.3. Деформация спектра сигнала биений в РВ с ЧМ принекогерентном рассеянии от шероховатой поверхности
16.
2.3. Деформация спектра сигнала биений в РВ с ЧМ принекогерентном рассеянии от шероховатой поверхности
н X н э2 2
э
- параметр, характеризующий значение
нормированной разности расстояний между высотой и
наклонной дальностью
- эквивалентная ширина ДНА, учитывающая влияние ДОР
17.
3. Анализ ошибок измерениявысоты в радиовысотомерах с
ЧМ
18.
3.1. Характеристика основных источников ошибокСмещение оценки – 1) формирование сигнала от большого участка
поверхности; 2) отклонение ЛА по крену и тангажу.
Распределение имеет произвольную форму.
Флуктуационные ошибки – определяются параметрами
зондирующего сигнала, соотношением сигнал/шум, параметрами
аппаратуры. Нестационарный закон распределения с переменными
дисперсией и средним значением.
Динамические ошибки - инерционность измерителя по
отношению к изменениям измеряемого параметра и в смещении
частоты биений на частоту Доплера .
19.
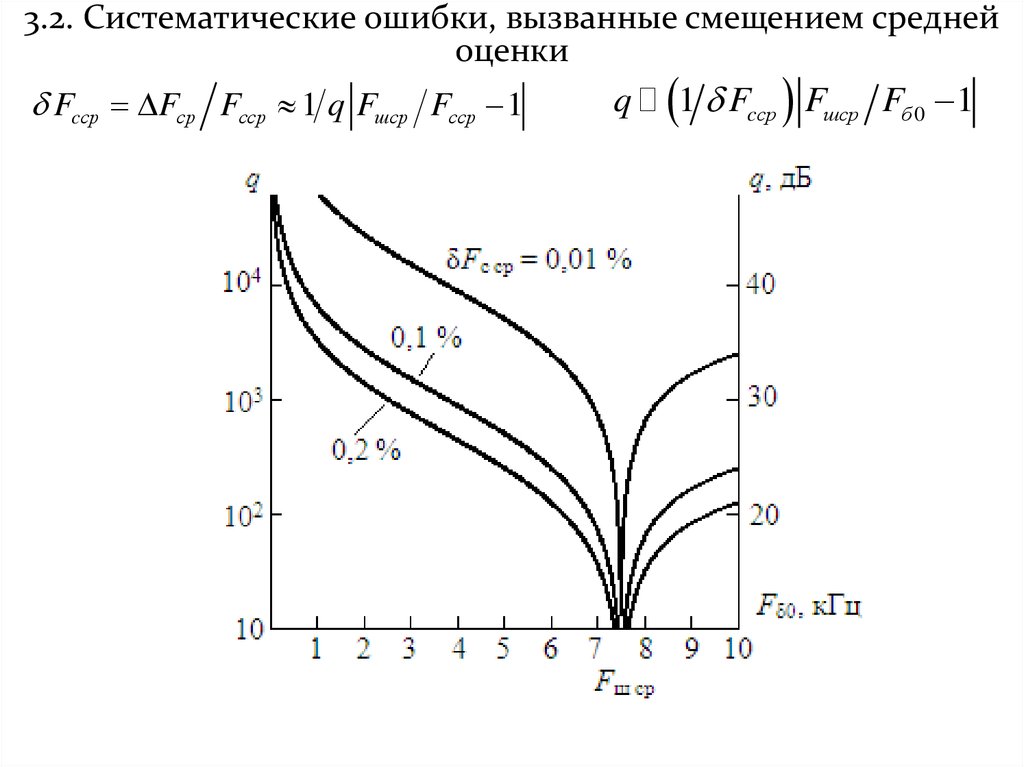
3.2. Систематические ошибки, вызванные смещением среднейоценки
Fб 0 8 fFM c H H M ,
Fбнакл Rнакл M H M cos 0 2 ,
Fб Fбнакл Fб 0 H M sec 0 2 1 .
Fб Fб 0 sec 0 2 1
Gб F 1 F Fб 0 Fб
Fбср Fб 0 Fб 3
ср Fб 3Fб 0 3
20.
3.2. Систематические ошибки, вызванные смещением среднейоценки
Fср
Pc Fcср Pш Fшср
Pc Pш
Fmax
F G F dF
ш
Fшср
0
Gш F dF
0
q
1
Fcср Fшср
q 1
q
F F 2 dF
Fmin
Fmax
F 2 dF
Fmin
Fmin 0,2 кГц; Fmax 10 кГц;
Fшср
3 4 Fmax 7,5 кГц;
Fcср Fб 0 Fб 3
4
4
1 4 Fmax
Fmin
3
3
Fmin
1 3 Fmax
21.
3.2. Систематические ошибки, вызванные смещением среднейоценки
Fср Fср Fcср
q
1
1
Fcср Fcср
Fшср
Fшср Fcср
q 1
q 1
q 1
22.
3.2. Систематические ошибки, вызванные смещением среднейоценки
q 1 Fcср Fшср Fб 0 1
Fcср Fср Fcср 1 q Fшср Fcср 1
23.
3.3. Флуктуационные ошибкиF kF Fб T
Собственные флуктуации отраженного сигнала:
H
H
F
c
Fc
kF
Fб 0
c
0
0
H sec
c sec
1
1
2 k
2
F
MT
8 fFM HT
Погрешность, обусловленная шумами:
Суммарная погрешность:
F kF FПРМ T q
ш
H
фл
H
F
фл
Fб 0
F2 F2
с
Fб 0
ш
24.
3.3. Флуктуационные ошибки25.
3.4. Динамическая ошибкаОшибка, обусловленная эффектом Допплера:
H
дин
H дин
Fд
2Vв
2Vв M
H
Fб 0 Fб 0
H
Пример: режим автоматической посадки самолета,
снижающего до высоты порядка 30 м со скоростью 3 м/с
при M = 1/200 и λ = 7 см
H
дин
H дин
0,014
H