



 mathematics
mathematics drafting
draftingSimilar presentations:

")


")





Способы преобразования эпюра и применение их к решению метрических и позиционных задач. (Лекция 5)
1. Лекция №5 Способы преобразования эпюра и применение их к решению метрических и позиционных задач
Решение многих позиционных и метрических задач упрощается, если геометрические элементы занимают по отношению к плоскостям проекций не общие,а частные положения. Чтобы геометрические элементы перевести из общего в
частное положение, эпюр преобразуют. Существует два основных способа
преобразования эпюра:
1. Способ замены плоскостей проекций. Объект преобразования остается
неподвижным в пространстве, а плоскости проекций заменяются новыми
плоскостями.
2. Способ вращения. Объект перемещается в пространстве до частного
положения относительно неизменной системы плоскостей проекций.
Способ замены плоскостей проекций
I. Замена одной плоскости проекций.
Иногда в качестве третьей плоскости проекций целесообразно использовать не профильную
плоскость, а любую плоскость, перпендикулярную к П1 или П2. В отличие от основных плоскостей
(П1 ,П2 ,П3), такая плоскость называется вспомогательной, а проекции на ней – вспомогательными
проекциями.
2.
Пример.A2
A4
Za
Za
A
Аx
Х
Za
Ya
Аx1
A1
Х1
П1/П2 – основная система плоскостей проекций
А – проецируемая точка; А1,А2 – основные проекции точки А; П4 – вспомогательная плоскость
проекций (П4 П1); П4/П1 – новая система плоскостей проекций; Х1 – вспомогательная ось проекций; А4 – вспомогательная проекция точки А.
Чтобы получить комплексный чертеж, нужно
совместить последовательно плоскость П4 с
плоскостью П1 вращением вокруг оси Х1, а
плоскость П1 с плоскостью П2 вращением вокруг оси Х. Направление вращения плоскостей
показано на чертеже стрелками.
А2
A2
Za
Х
A4
Ax
Ax1
Za
Х
На эпюре: А1А2 Х
П2
П1
А4
β
Х1
А4Ах1 = А2Ах
Ах1
A1
А1А4
А1
Х1
Х1
Чтобы построить вспомогательную проекцию точки, следует из той проекции точки, которая не меняется,
опустить перпендикуляр на новую ось проекций и на нем отложить расстояние, равное расстоянию от
второй проекции, которая меняется, до предыдущей оси.
3. Основные позиционные задачи
1. Прямую общего положения преобразовать в прямую уровня.A2
X
А4
П2
П1
В2
П2
П1
н.в. АВ
Х1 = П4 П1; Х1 А1В1
α
АВ П4
А4В4 = АВ
В4
A1
П4
П1
α – угол наклона прямой АВ
к плоскости П1
Эта задача применяется для определения натуральной величины отрезка прямой общего положения и
углов наклона отрезка к плоскостям проекций.
В1
2. Прямую уровня преобразовать в проецирующую прямую
В2
АВ – фронтальная прямая. А2В2 = АВ
П2
П1
A2
X
А4 = В4
П2
П1
П2
П4
АВ
A1
В1
Х1 А2В2
П4
Применяется для определения расстояний: 1. От точки
до прямой уровня; 2. Между двумя параллельными
прямыми уровня.
4.
3. Плоскость общего положения преобразовать в проецирующуюР – плоскость общего положения.
N2
Рx
N1
X
П2
П1
П4
П1
Х
P
α
P; N4
П4
Применяется для определения: 1. Углов наклона
плоскости к плоскостям проекций; 2. Расстояния от
точки до плоскости; 3. Расстояния между параллельными плоскостями.
Px1
N4
Х1; Х1 h1°P; N
4. Проецирующую плоскость преобразовать в плоскость уровня
А4
С4
A2
X
В1
П2
П1
П2
П1
В4
В2
Плоскость, заданная ΔАВС
С2
АВС
П2
П4
Х
Х1; Х1
А2В2С2
П4; А4В4С4 = АВС
Применяется для определения натуральной
величины фигуры, занимающей проецирующее положение.
A1
С1
5.
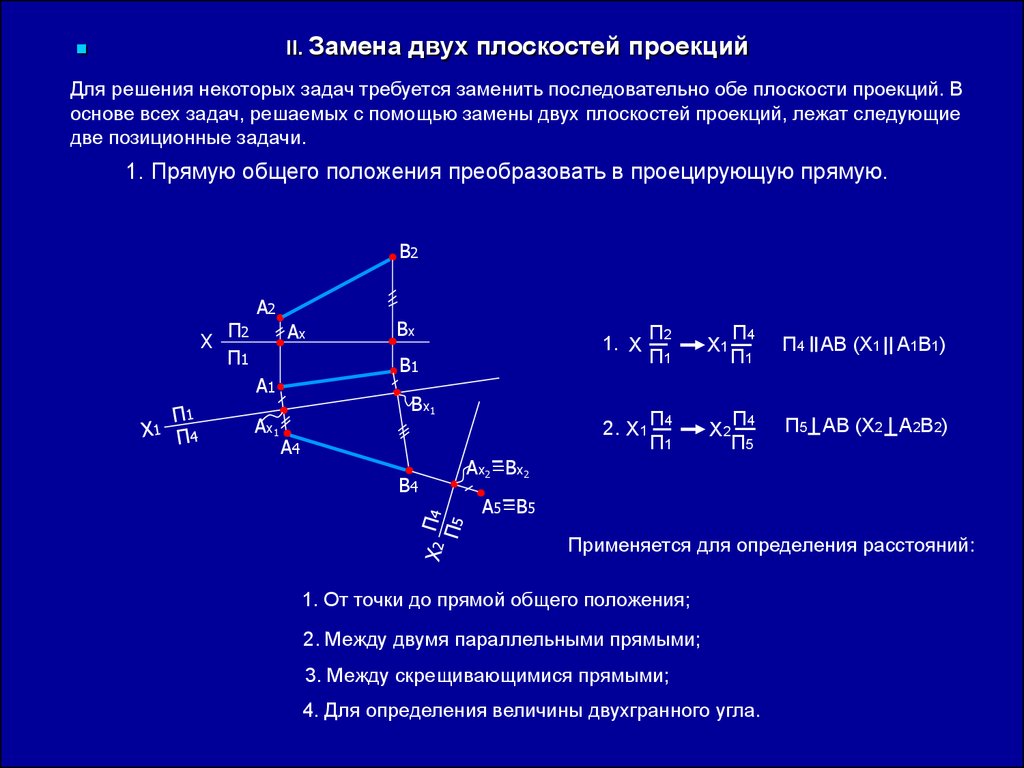
II. Заменадвух плоскостей проекций
Для решения некоторых задач требуется заменить последовательно обе плоскости проекций. В
основе всех задач, решаемых с помощью замены двух плоскостей проекций, лежат следующие
две позиционные задачи.
1. Прямую общего положения преобразовать в проецирующую прямую.
В2
X
П2
П1
A2
Ах
Вх1
А4
В4
П2
П1
Х1
2. Х1 П4
П1
Х2
1. Х
В1
A1
Ах1
Вх
П4
П1
П4 АВ (Х1 А1В1)
П4
П5
П5 АВ (Х2 А2В2)
Ах2=Вх2
А5=В5
Применяется для определения расстояний:
1. От точки до прямой общего положения;
2. Между двумя параллельными прямыми;
3. Между скрещивающимися прямыми;
4. Для определения величины двухгранного угла.
6.
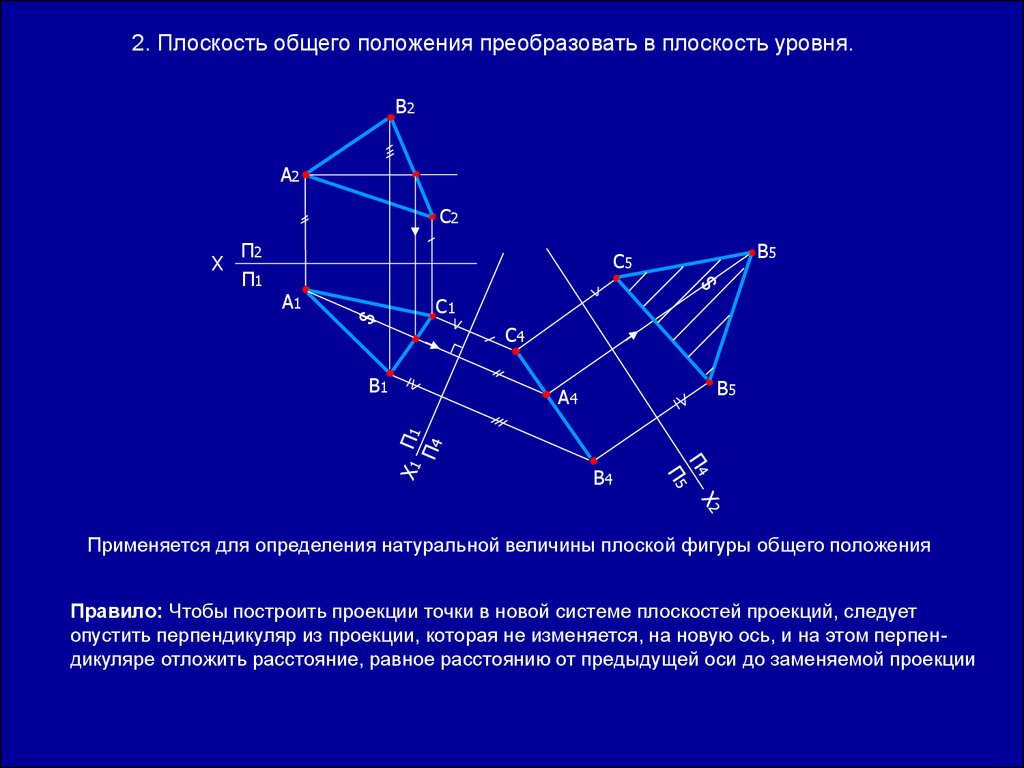
2. Плоскость общего положения преобразовать в плоскость уровня.В2
A2
С2
X
П2
П1
В5
С5
A1
С1
С4
В1
В5
А4
В4
Применяется для определения натуральной величины плоской фигуры общего положения
Правило: Чтобы построить проекции точки в новой системе плоскостей проекций, следует
опустить перпендикуляр из проекции, которая не изменяется, на новую ось, и на этом перпендикуляре отложить расстояние, равное расстоянию от предыдущей оси до заменяемой проекции